
Bounded-Error Parameter Estimation Using Integro-Differential Equations for Hindmarsh–Rose Model


Abstract
:1. Introduction
2. Parameter Estimation Method
2.1. Differential Algebra
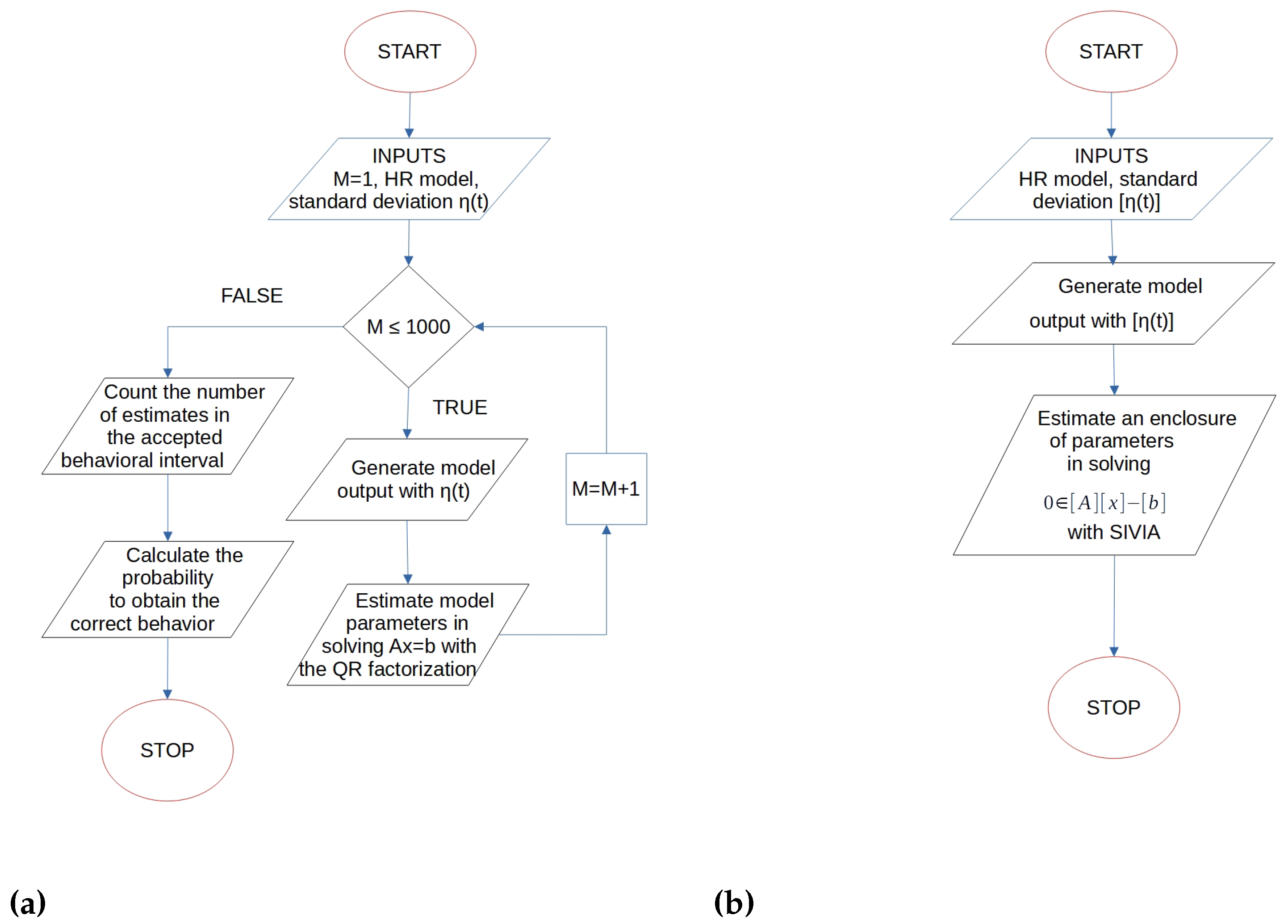
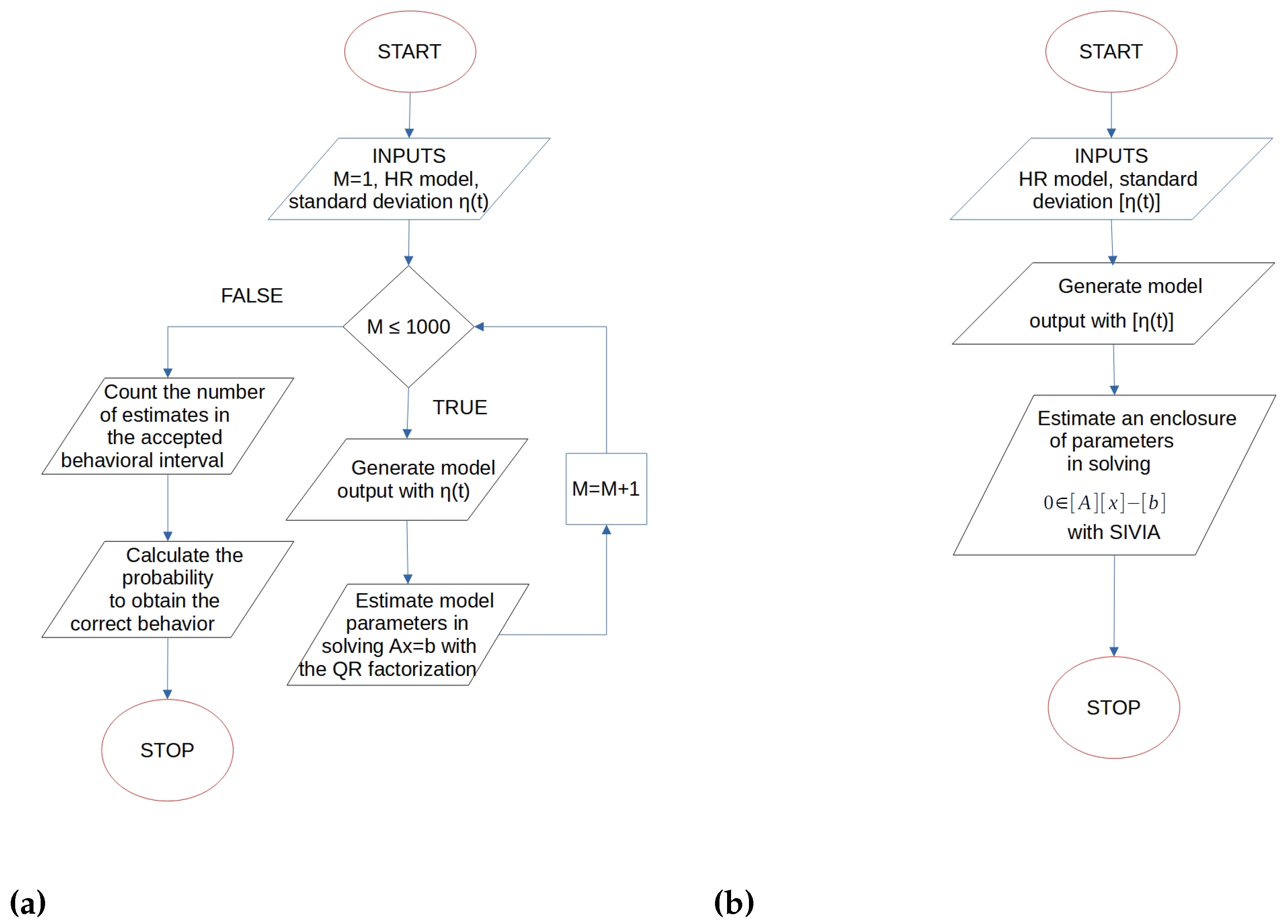
2.2. Estimation Procedure
2.3. Interval Set Inversion
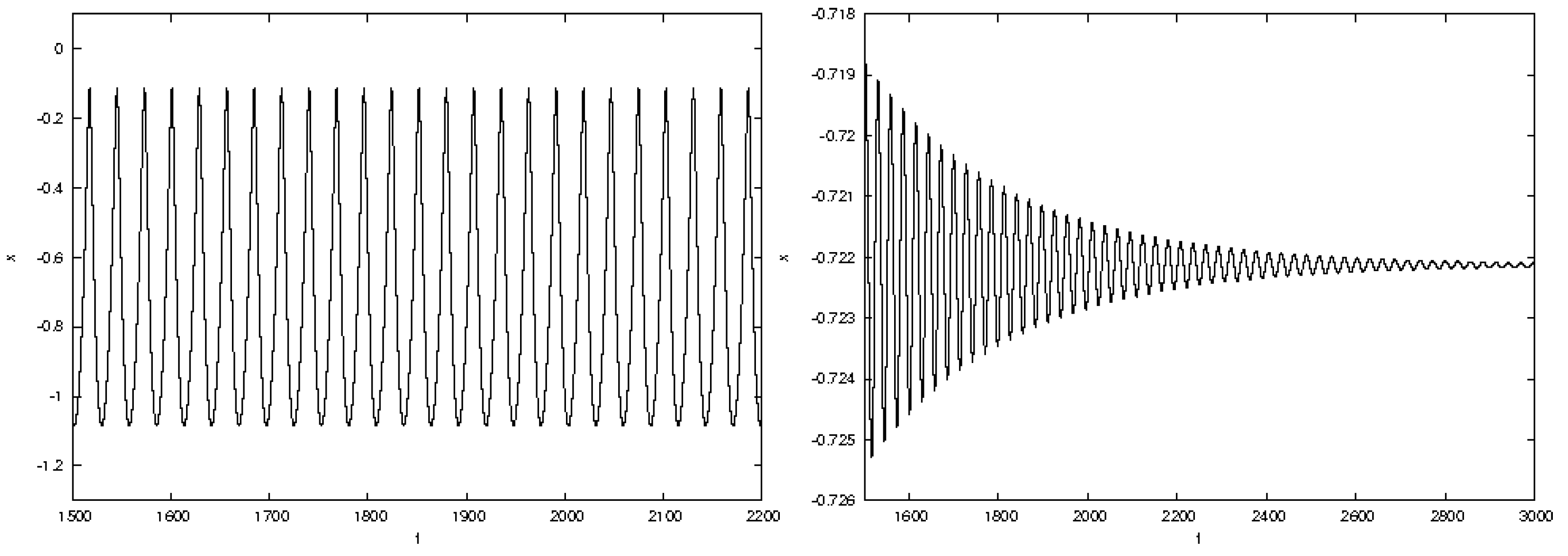
3. Hindmarsh–Rose Model
- describes the membrane potential;
- is the recovery variable, associated with the fast current, due to the passage of the Na or K ions;
- is the adaptation current, associated with the slow current, due to the passage of the Ca ions.
3.1. ID-IO Polynomial
3.2. Parameter Estimation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Boulier, F.; Lazard, D.; Ollivier, F.; Petitot, M. Computing Representation for Radicals of Finitely Generated Differential Ideals; Technical Report; Université Lille I: Villeneuve d’Ascq, France, 1997. [Google Scholar]
- Loeb, J.; Cahen, G. More about process identification. Automatica 1965, 10, 359–361–447. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Rodriguez, C.G.; Romero, J.C.; Juárez, A.L. Algebraic Identification and Estimation Methods; Feedback Control Systems; Wiley: Hoboken, NJ, USA, 2014. [Google Scholar]
- Verdière, N.; Jauberthie, C.; Travé-Massuyès, L. Improvements in bounded error parameter estimation using distribution theory. In Proceedings of the European Control Conference 2018, Limassol, Cyprus, 12–15 June 2018; pp. 2460–2465. [Google Scholar]
- Verdière, N.; Jauberthie, C. Parameter Estimation Procedure Based on Input-Output Integro-Differential Polynomials. Application to the Hindmarsh-Rose Model. In Proceedings of the European Control Conference 2020, Saint Petersbourg, Russia, 25 November 2020; pp. 220–225. [Google Scholar]
- Jaulin, L.; Kieffer, M.; Didrit, O.; Walter, E. Applied Interval Analysis: With Examples in Parameter and State Estimation, Robust Control and Robotics, 1st ed.; An Emerging Paradigm; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Boulier, F.; Korporal, A.; Lemaire, F.; Perruquetti, W.; Poteaux, A.; Ushirobira, R. An Algorithm for Converting Nonlinear Differential Equations to Integral Equations with an Application to Parameter Estimation from Noisy Data. In Proceedings of the Computer Algebra in Scientific Computing 2014, Warsaw, Poland, 8–12 September 2014; pp. 28–43. [Google Scholar]
- Hindmarsh, J.; Rose, R. A model of the nerve impulse using two first-order differential equations. Nature 1982, 296, 162–164. [Google Scholar] [CrossRef] [PubMed]
- Hindmarsh, J.; Rose, R. A model of neuronal bursting using three coupled first order differential equations. Proc. R. Soc. Lond. Biol. Sci. 1984, 221, 87–102. [Google Scholar]
- Hodgkin, A.L.; Huxley, A.F. A quantitative description of membrane current and its application to conduction and excitation in nerve. J. Physiol. 1952, 117, 500–544. [Google Scholar] [CrossRef] [PubMed]
- Izhikevich, E.M. Dynamical Systems in Neuroscience; MIT Press: Cambridge, MA, USA, 2007. [Google Scholar]
- Tokuda, I.; Parlitz, U.; Illing, L.; Kennel, M.; Abarbanel, H. Parameter estimation for neuron models. In Proceedings of the AIP Conference, San Diego, CA, USA, 26–29 August 2003. [Google Scholar]
- Corson, N.; Lanza, V.; Verdière, N. Hopf bifurcations in a chain of coupled Hindmarsh-Rose system. Acta Biotheor. 2016, 65. [Google Scholar]
- Schumann-Bishoff, J.; Parlitz, U. State and parameter estimation using unconstrained optimization. Phys. R. E 2011, 84., 375–402. [Google Scholar] [CrossRef] [PubMed]
- Steur, E. Parameter Estimation in Hindmarsh-Rose Neurons. Ph.D. Thesis, Technische Universiteit Eindhoren, Eindhoven, The Netherlands, 2006. [Google Scholar]
- Denis-Vidal, L.; Joly-Blanchard, G.; Noiret, C.; Petitot, M. An algorithm to test identifiability of non-linear systems. In Proceedings of the 5th IFAC NOLCOS, Saint Petersburg, Russia, 4–6 July 2001; pp. 174–178. [Google Scholar]
- Jauberthie, C.; Verdière, N.; Travé-Massuyès, L. Fault detection and identification relying on set-membership identifiability. Annu. Rev. Control. 2013, 37, 129–136. [Google Scholar] [CrossRef] [Green Version]
- Fliess, M.; Mboup, M.; Mounier, H.; Sira-Ramirez, H. Questioning Some Paradigms of Signal Processing via Concret Examples. Available online: https://hal.inria.fr/inria-00001059/file/signalg.pdf (accessed on 7 April 2022).
- Jaulin, L.; Walter, E. Set inversion via interval analysis for nonlinear bounded-error estimation. Automatica 1993, 29, 1053–1064. [Google Scholar] [CrossRef]
- Rauh, A.; Dötschel, T.; Auer, E.; Aschemann, H. Interval Methods for Control-Oriented Modeling of the Thermal Behavior of High-Temperature Fuel Cell Stacks. IFAC Proc. Vol. 2012, 45, 446–451. [Google Scholar] [CrossRef]
- Rauh, A.; Kersten, J.; Aschemann, H. An Interval Approach for Parameter Identification and Observer Design of Spatially Distributed Heating Systems. IFAC-PapersOnLine 2018, 51, 337–342. [Google Scholar] [CrossRef]
- AbdelAty, A.M.; Fouda, M.E.; Eltawil, A. Parameter Estimation of Two Spiking Neuron Models With Meta-Heuristic Optimization Algorithms. Front. Neuroinform. 2022, 16. [Google Scholar] [CrossRef] [PubMed]
- Lynch, E.P.; Houghton, C.J. Parameter estimation of neuron models using in-vitro and in-vivo electrophysiological data. Front. Neuroinform. 2015, 9, 10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jauberthie, C.; Travé-Massuyès, L.; Verdière, N. Set-membership identifiability of nonlinear models and related parameter estimation properties. Int. J. Appl. Math. Comput. Sci. 2016, 26, 803–813. [Google Scholar] [CrossRef] [Green Version]
- Rihan, F.A. Sensitivity analysis for dynamic systems with time-lags. J. Comput. Appl. Math. 2003, 151, 445–462. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
| 0.0089 | 0.1300 | 0.1366 | 0.1282 | |
| 0.0101 | 0.1235 | 0.1136 | 0.1247 | |
| 0.0119 | 0.1080 | 0.3127 | 0.1261 | |
| 0.0657 | 0.2210 | 1.8131 | 0.1690 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jauberthie, C.; Verdière, N. Bounded-Error Parameter Estimation Using Integro-Differential Equations for Hindmarsh–Rose Model. Algorithms 2022, 15, 179. https://doi.org/10.3390/a15060179
Jauberthie C, Verdière N. Bounded-Error Parameter Estimation Using Integro-Differential Equations for Hindmarsh–Rose Model. Algorithms. 2022; 15(6):179. https://doi.org/10.3390/a15060179
Chicago/Turabian StyleJauberthie, Carine, and Nathalie Verdière. 2022. "Bounded-Error Parameter Estimation Using Integro-Differential Equations for Hindmarsh–Rose Model" Algorithms 15, no. 6: 179. https://doi.org/10.3390/a15060179
APA StyleJauberthie, C., & Verdière, N. (2022). Bounded-Error Parameter Estimation Using Integro-Differential Equations for Hindmarsh–Rose Model. Algorithms, 15(6), 179. https://doi.org/10.3390/a15060179