
Solving the Parallel Drone Scheduling Traveling Salesman Problem via Constraint Programming



Abstract
:1. Introduction
2. The Parallel Drone Scheduling Traveling Salesman Problem
3. A Constraint Programming Model
4. Computational Experiments
4.1. Preliminary Experiments
4.1.1. Scaling and Precision
4.1.2. Multi-Threading Computation
4.2. Main Experimental Results
4.2.1. Instances Proposed in [3]
4.2.2. Instances Proposed in Mbiadou Saleu et al. in [7]
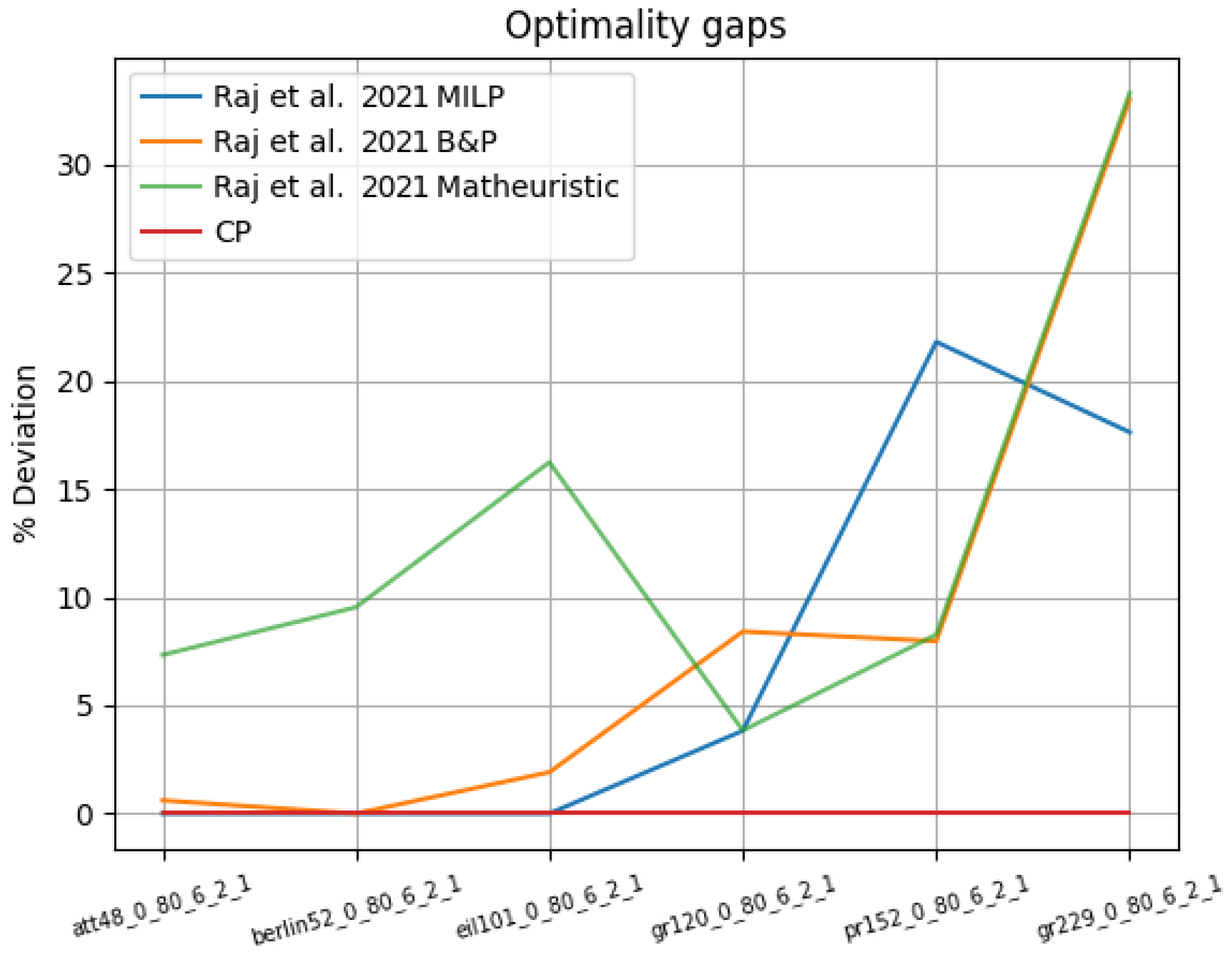
4.2.3. Instances Proposed in [13]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| att48_0_80_1_2_1 | 29,954.0 | 29,954.0 | 29,954.0 | 29,954.0 | - | - | 29,954.0 | 0.7 | 1.3 |
| att48_1_80_1_2_1 | 33,798.0 | 33,798.0 | 33,798.0 | 33,798.0 | - | - | 33,798.0 | 2.7 | 3.3 |
| att48_0_0_1_2_1 | 42,136.0 | 42,136.0 | 42,136.0 | 42,136.0 | - | - | 42,136.0 | 0.3 | 0.3 |
| att48_0_20_1_2_1 | 38,662.0 | 38,662.0 | 38,662.0 | 38,662.0 | - | - | 38,662.0 | 0.8 | 0.8 |
| att48_0_40_1_2_1 | 31,592.0 | 31,592.0 | 31,592.0 | 31,592.0 | - | - | 31,592.0 | 0.5 | 0.5 |
| att48_0_60_1_2_1 | 30,788.8 | 30,788.8 | 30,788.8 | 30,788.8 | - | - | 30,788.8 | 2.0 | 2.2 |
| att48_0_100_1_2_1 | 27,784.0 | 27,784.0 | 27,784.0 | 27,784.0 | - | - | 27,784.0 | 4.1 | 5.2 |
| att48_0_80_1_1_1 | 33,234.0 | 33,234.0 | 33,234.0 | 33,234.0 | - | - | 33,234.0 | 1.4 | 2.1 |
| att48_0_80_1_3_1 | 29,142.0 | 29,142.0 | 29,142.0 | 29,142.0 | - | - | 29,142.0 | 2.4 | 5.3 |
| att48_0_80_1_4_1 | 28,686.0 | 28,686.0 | 28,686.0 | 28,686.0 | - | - | 28,686.0 | 3.8 | 7.1 |
| att48_0_80_1_5_1 | 28,610.0 | 28,610.0 | 28,610.0 | 28,610.0 | - | - | 28,610.0 | 2.9 | 7.6 |
| att48_0_80_2_2_1 | 28,686.0 | 28,686.0 | 28,686.0 | 28,686.0 | - | 28,796.0 | 28,686.0 | 11.1 | 13.6 |
| att48_0_80_3_2_1 | 28,610.0 | 28,610.0 | 28,610.0 | 28,610.0 | - | - | 28,610.0 | 2.0 | 18.0 |
| att48_0_80_4_2_1 | 28,610.0 | 28,610.0 | 28,610.0 | 28,610.0 | - | 28,610.0 | 28,610.0 | 5.9 | 22.6 |
| att48_0_80_5_2_1 | 28,610.0 | 28,610.0 | 28,610.0 | 28,610.0 | - | - | 28,610.0 | 3.5 | 27.3 |
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| berlin52_0_80_1_2_1 | 6386.5 | 6386.5 | 6386.5 | 6386.5 | - | - | 6386.5 | 3.5 | 4.5 |
| berlin52_1_80_1_2_1 | 7830.0 | 7830.0 | 7830.0 | 7830.0 | - | - | 7830.0 | 0.7 | 1.0 |
| berlin52_0_0_1_2_1 | 9675.0 | 9675.0 | 9675.0 | 9675.0 | - | - | 9675.0 | 0.4 | 0.5 |
| berlin52_0_20_1_2_1 | 9350.0 | 9350.0 | 9350.0 | 9350.0 | - | - | 9350.0 | 1.1 | 1.1 |
| berlin52_0_40_1_2_1 | 8300.0 | 8300.0 | 8300.0 | 8300.0 | - | - | 8300.0 | 1.0 | 1.1 |
| berlin52_0_60_1_2_1 | 7410.0 | 7410.0 | 7410.0 | 7410.0 | - | - | 7410.0 | 3.0 | 6.7 |
| berlin52_0_100_1_2_1 | 6192.0 | 6192.0 | 6192.0 | 6192.0 | - | - | 6192.0 | 13.7 | 19.6 |
| berlin52_0_80_1_1_1 | 7450.0 | 7450.0 | 7450.0 | 7450.0 | - | - | 7450.0 | 1.5 | 5.4 |
| berlin52_0_80_1_3_1 | 5656.6 | 5656.6 | 5656.6 | 5656.6 | - | - | 5656.6 | 1.9 | 2.4 |
| berlin52_0_80_1_4_1 | 5290.7 | 5290.7 | 5290.7 | 5290.7 | - | - | 5290.7 | 1.0 | 1.8 |
| berlin52_0_80_1_5_1 | 5190.0 | 5190.0 | 5190.0 | 5190.0 | - | - | 5190.0 | 2.0 | 2.1 |
| berlin52_0_80_2_2_1 | 5299.8 | 5290.7 | 5290.7 | 5290.7 | - | 5290.7 a | 5290.7 | 2.8 | 5.3 |
| berlin52_0_80_3_2_1 | 5190.0 | 5190.0 | 5190.0 | 5190.0 | - | - | 5190.0 | 2.2 | 2.2 |
| berlin52_0_80_4_2_1 | 5190.0 | 5190.0 | 5190.0 | 5190.0 | - | 5190.0 a | 5190.0 | 2.2 | 2.2 |
| berlin52_0_80_5_2_1 | 5190.0 | 5190.0 | 5190.0 | 5190.0 | - | - | 5190.0 | 1.2 | 1.3 |
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| eil101_0_80_1_2_1 | 564.0 | 564.0 | 564.0 | 564.0 | 564.0 | - | 564.0 | 34.3 | 39.5 |
| eil101_1_80_1_2_1 | 650.0 | 649.0 | 649.0 | 649.0 | 649.0 | - | 649.0 | 71.4 | 80.8 |
| eil101_0_0_1_2_1 | 819.0 | 819.0 | 819.0 | 819.0 | 819.0 | - | 819.0 | 5.9 | 6.0 |
| eil101_0_20_1_2_1 | 738.0 | 736.0 | 736.0 | 736.0 | 736.0 | - | 736.0 | 15.7 | 20.2 |
| eil101_0_40_1_2_1 | 646.0 | 646.0 | 646.0 | 646.0 | 646.0 | - | 646.0 | 21.4 | 38.8 |
| eil101_0_60_1_2_1 | 578.0 | 578.0 | 578.0 | 578.0 | 578.0 | - | 578.0 | 31.4 | 35.9 |
| eil101_0_100_1_2_1 | 561.4 | 560.0 | 560.0 | 560.0 | 560.0 | - | 560.0 | 54.8 | 92.4 |
| eil101_0_80_1_1_1 | 650.0 | 650.0 | 650.0 | 650.0 | 650.0 | - | 650.0 | 70.3 | 92.5 |
| eil101_0_80_1_3_1 | 504.0 | 504.0 | 503.9 | 503.2 | 503.2 | - | 503.2 | 22.2 | 44.2 |
| eil101_0_80_1_4_1 | 456.0 | 456.0 | 456.0 | 456.0 | 456.0 | - | 456.0 | 16.0 | 36.0 |
| eil101_0_80_1_5_1 | 420.8 | 421.0 | 420.8 | 420.8 | 420.8 | - | 420.8 | 29.6 | 35.5 |
| eil101_0_80_2_2_1 | 456.0 | 456.0 | 456.0 | 456.0 | 456.0 | 458.8 | 456.0 | 57.7 | 276.0 |
| eil101_0_80_3_2_1 | 395.0 | 395.0 | 395.0 | 395.0 | 395.0 | - | 395.0 | 29.9 | 65.9 |
| eil101_0_80_4_2_1 | 346.7 | 346.0 | 346.0 | 346.0 | 346.0 | 354.0 | 346.0 | 25.5 | 36.7 |
| eil101_0_80_5_2_1 | 319.7 | 318.0 | 318.0 | 318.0 | 318.0 | - | 318.0 | 11.9 | 33.5 |
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| gr120_0_80_1_2_1 | 1414.0 | 1420.8 | 1414.0 | 1414.0 | 1414.0 | - | 1414.0 | 168.7 | 206.2 |
| gr120_1_80_1_2_1 | 1730.0 | 1726.0 | 1726.0 | 1726.0 | 1726.0 | - | 1726.0 | 99.0 | 113.6 |
| gr120_0_0_1_2_1 | 2006.0 | 2006.0 | 2006.0 | 2006.0 | 2006.0 | - | 2006.0 | 7.9 | 8.1 |
| gr120_0_20_1_2_1 | 1736.0 | 1736.0 | 1736.0 | 1736.0 | 1736.0 | - | 1736.0 | 48.1 | 52.0 |
| gr120_0_40_1_2_1 | 1624.0 | 1624.0 | 1624.0 | 1624.0 | 1624.0 | - | 1624.0 | 142.0 | 152.6 |
| gr120_0_60_1_2_1 | 1494.0 | 1494.0 | 1494.0 | 1494.0 | 1494.0 | - | 1494.0 | 27.5 | 69.8 |
| gr120_0_100_1_2_1 | 1414.8 | 1416.0 | 1414.0 | 1414.0 | 1414.0 | - | 1414.0 | 138.2 | 775.5 |
| gr120_0_80_1_1_1 | 1592.0 | 1592.0 | 1592.0 | 1592.0 | 1592.0 | - | 1592.0 | 119.7 | 288.1 |
| gr120_0_80_1_3_1 | 1289.3 | 1291.0 | 1284.7 | 1284.7 | 1284.7 | - | 1284.7 | 75.7 | 97.8 |
| gr120_0_80_1_4_1 | 1189.7 | 1192.0 | 1186.0 | 1186.0 | 1186.0 | - | 1186.0 | 87.4 | 139.7 |
| gr120_0_80_1_5_1 | 1112.0 | 1114.0 | 1112.0 | 1112.0 | 1112.0 | - | 1112.0 | 91.8 | 403.8 |
| gr120_0_80_2_2_1 | 1188.5 | 1197.0 | 1186.0 | 1186.0 | 1186.0 | 1202.2 | 1186.0 | 234.0 | 368.3 |
| gr120_0_80_3_2_1 | 1044.7 | 1050.0 | 1044.0 | 1044.0 | 1044.0 | - | 1044.0 | 330.4 | 700.9 |
| gr120_0_80_4_2_1 | 946.0 | 946.0 | 943.0 | 943.0 | 943.0 | 949.0 | 943.0 | 627.9 | 663.9 |
| gr120_0_80_5_2_1 | 880.0 | 881.0 | 878.9 | 878.9 | 878.9 | - | 878.7 | 6036.6 | 6037.3 |
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| pr152_0_80_1_2_1 | 76,008.0 | 76,008.0 | 76,008.0 | 76,008.0 | 76,008.0 | - | 76,008.0 | 316.2 | 324.4 |
| pr152_1_80_1_2_1 | 76,556.0 | 76,556.0 | 76,556.0 | 76,556.0 | 76,556.0 | - | 76,556.0 | 259.8 | 1045.9 |
| pr152_0_0_1_2_1 | 86,596.0 | 86,596.0 | 86,596.0 | 86,596.0 | 86,596.0 | - | 86,596.0 | 29.8 | 42.1 |
| pr152_0_20_1_2_1 | 82,504.0 | 82,504.0 | 82,504.0 | 82,504.0 | 82,504.0 | - | 82,504.0 | 622.3 | 1120.8 |
| pr152_0_40_1_2_1 | 77,372.0 | 77,316.0 | 77,236.0 | 77,236.0 | 77,236.0 | - | 77,236.0 | 23.5 | 39.8 |
| pr152_0_60_1_2_1 | 76,786.0 | 76,786.0 | 76,786.0 | 76,786.0 | 76,758.0 | - | 76,758.0 | 47.0 | 74.1 |
| pr152_0_100_1_2_1 | 74,468.0 | 74,302.0 | 74,302.0 | 74,302.0 | 74,302.0 | - | 74,302.0 | 708.5 | 775.0 |
| pr152_0_80_1_1_1 | 80,164.0 | 79,952.0 | 79,952.0 | 79,952.0 | 79,952.0 | - | 79,952.0 | 94.3 | 106.0 |
| pr152_0_80_1_3_1 | 72,936.0 | 72,936.0 | 72,936.0 | 72,936.0 | 72,936.0 | - | 72,936.0 | 243.8 | 398.1 |
| pr152_0_80_1_4_1 | 70,412.0 | 70,328.0 | 70,148.0 | 70,148.0 | 70,148.0 | - | 70,148.0 | 431.2 | 553.7 |
| pr152_0_80_1_5_1 | 67,798.0 | 67,798.0 | 67,798.0 | 67,798.0 | 67,858.0 | - | 67,798.0 | 1472.0 | 2260.9 |
| pr152_0_80_2_2_1 | 70,244.0 | 70,405.5 | 70,148.0 | 70,148.0 | 70,148.0 | 79,686.0 | 70,148.0 | 195.4 | 483.6 |
| pr152_0_80_3_2_1 | 65,062.1 | 64,720.3 | 64,626.0 | 64,550.9 | 64,550.0 | - | 64,550.0 | 393.4 | 575.6 |
| pr152_0_80_4_2_1 | 60,027.4 | 59,772.0 | 59,772.0 | 59,772.0 | 59,756.0 | 63,990.0 | 59,756.0 | 325.4 | 366.8 |
| pr152_0_80_5_2_1 | 56,336.1 | 56,262.0 | 56,262.0 | 56,180.0 | 56,178.0 | - | 56,178.0 | 742.9 | 941.0 |
| Instance | Mbiadou Saleu et al. [7]—UB | Dell’Amico et al. [10]—UB | Dinh et al. [11]—UB | Lei and Chen [12]—UB | Nguyen et al. [14]—UB | Raj et al. [13]—UB | CP | ||
|---|---|---|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | |||||||
| gr229_0_80_1_2_1 | 1794.8 | 1785.9 | 1781.2 | 1783.1 | 1780.9 | - | 1780.9 | 1697.6 | 1817.6 |
| gr229_1_80_1_2_1 | 1913.7 | 1911.6 | 1911.6 | 1911.6 | 1911.6 | - | 1911.6 | 2084.8 | 2355.3 |
| gr229_0_0_1_2_1 | 2020.2 | 2017.2 | 2017.2 | 2017.2 | 2017.2 | - | 2017.2 | 125.6 | 127.7 |
| gr229_0_20_1_2_1 | 1862.8 | 1860.1 | 1860.1 | 1860.1 | 1860.1 | - | 1860.1 | 279.4 | 316.1 |
| gr229_0_40_1_2_1 | 1828.0 | 1827.0 | 1824.8 | 1825.9 | 1824.8 | - | 1824.8 | 1517.3 | 1595.4 |
| gr229_0_60_1_2_1 | 1807.5 | 1797.4 | 1796.9 | 1796.6 | 1796.6 | - | 1796.6 | 691.8 | 794.1 |
| gr229_0_100_1_2_1 | 1498.1 | 1496.3 | 1697.0 | 1496.3 | 1496.3 | - | 1496.3 | 316.4 | 358.9 |
| gr229_0_80_1_1_1 | 1865.0 | 1863.1 | 1862.0 | 1862.0 | 1862.0 | - | 1862.0 | 558.5 | 723.8 |
| gr229_0_80_1_3_1 | 1735.2 | 1725.5 | 1717.9 | 1719.9 | 1716.7 | - | 1716.7 | 806.8 | 1371.6 |
| gr229_0_80_1_4_1 | 1679.3 | 1675.8 | 1668.1 | 1669.9 | 1664.8 | - | 1664.8 | 2748.8 | 3940.5 |
| gr229_0_80_1_5_1 | 1642.0 | 1629.4 | 1623.1 | 1622.9 | 1620.2 | - | 1620.2 | 1895.6 | 2434.2 |
| gr229_0_80_2_2_1 | 1686.8 | 1673.7 | 1668.3 | 1666.9 | 1664.8 | 1851.5 | 1664.8 | 2139.1 | 3644.9 |
| gr229_0_80_3_2_1 | 1603.9 | 1592.5 | 1582.9 | 1582.4 | 1580.9 | - | 1580.9 | 4103.6 | 6480.7 |
| gr229_0_80_4_2_1 | 1518.6 | 1526.9 | 1516.7 | 1515.1 | 1511.7 | 1899.9 | 1511.7 | 6109.2 | 7528.1 |
| gr229_0_80_5_2_1 | 1483.7 | 1467.8 | 1465.0 | 1460.7 | 1458.7 | - | 1458.7 | 15,361.5 | 17,367.1 |
| Instances | Raj et al. [13] MILP UB | Raj et al. [13] B&P UB | Raj et al. [13] Matheuristic UB | CP | ||
|---|---|---|---|---|---|---|
| Opt Cost | Sec Found | Sec Opt | ||||
| att48_0_80_6_2_1 | 28,610.0 | 28,784.0 | 30,708.0 | 28,610.0 | 9.8 | 43.0 |
| berlin52_0_80_6_2_1 | 5190.0 a | 5190.0 | 5685.0 | 5190.0 | 4.8 | 4.9 |
| eil101_0_80_6_2_1 | 314.0 | 320.0 | 365.0 | 314.0 | 43.6 | 78.2 |
| gr120_0_80_6_2_1 | 851.4 | 889.0 | 851.5 | 820.0 | 666.9 | 2232.0 |
| pr152_0_80_6_2_1 | 65,140.0 | 57,794.0 | 57,794.0 | 53,478.0 | 1401.2 | 1446.9 |
| gr229_0_80_6_2_1 | 1664.6 | 1883.8 | 1883.8 | 1415.1 | 3214.2 | 115,622.3 |
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Joerss, M.; Schroeder, J.; Neuhaus, F.; Klink, C.; Mann, F. Parcel Delivery—The Future of Last Mile; Volume Travel, Transport and Logistics, McKinsey and Company: Minato City, Japan, 2016. [Google Scholar]
- Wolleswinkel, R.; Lukic, V.; Jap, W.; Chan, R.; Govers, J.; Banerjee, S. An Onslaught of New Rivals in Parcel and Express; Volume Travel, Transport and Logistics, Boston Consulting Group: Boston, MA, USA, 2018. [Google Scholar]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Algorithms based on branch and bound for the flying sidekick traveling salesman problem. Omega 2021, 104, 102493. [Google Scholar] [CrossRef]
- Toklu, N.E.; Montemanni, R.; Gambardella, L.M. An ant colony system for the capacitated vehicle routing problem with uncertain travel costs. In Proceedings of the 2013 IEEE Symposium on Swarm Intelligence (SIS), Singapore, 16–19 April 2013; pp. 32–39. [Google Scholar]
- Yang, H.; Yuan, J.; Li, C.; Zhao, G.; Sun, Z.; Yao, Q.; Bao, B.; Vasilakos, A.V.; Zhang, J. BrainIoT: Brain-Like Productive Services Provisioning With Federated Learning in Industrial IoT. IEEE Internet Things J. 2022, 9, 2014–2024. [Google Scholar] [CrossRef]
- Mbiadou Saleu, R.G.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. An iterative two-step heuristic for the parallel drone scheduling traveling salesman problem. Networks 2018, 72, 459–474. [Google Scholar] [CrossRef]
- Mbiadou Saleu, R.G.; Deroussi, L.; Feillet, D.; Grangeon, N.; Quilliot, A. The parallel drone scheduling problem with multiple drones and vehicles. Eur. J. Oper. Res. 2022, 300, 571–589. [Google Scholar] [CrossRef]
- Donati, A.V.; Montemanni, R.; Gambardella, L.M.; Rizzoli, A.E. Integration of a robust shortest path algorithm with a time dependent vehicle routing model and applications. In Proceedings of the International Symposium on Computational Intelligence for Measurement Systems and Applications, Lugano, Switzerland, 29–31 July 2003; pp. 26–31. [Google Scholar]
- Dell’Amico, M.; Montemanni, R.; Novellani, S. Matheuristic algorithms for the parallel drone scheduling traveling salesman problem. Ann. Oper. Res. 2020, 289, 211–226. [Google Scholar] [CrossRef] [Green Version]
- Dinh, Q.T.; Do, D.D.; Há, M.H. Ants can solve the parallel drone scheduling traveling salesman problem. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO), Lille, France, 10–14 July 2021; pp. 14–21. [Google Scholar]
- Lei, D.; Chen, X. An improved variable neighborhood search for parallel drone scheduling traveling salesman problem. Appl. Soft Comput. 2022, 127, 109416. [Google Scholar] [CrossRef]
- Raj, R.; Lee, D.; Lee, S.; Walteros, J.; Murray, C. A Branch-and-Price Approach for the Parallel Drone Scheduling Vehicle Routing Problem. SSRN Electron. J. 2021, 3879710. [Google Scholar] [CrossRef]
- Nguyen, M.A.; Dang, G.T.H.; Há, M.H.; Pham, M.T. The min-cost parallel drone scheduling vehicle routing problem. Eur. J. Oper. Res. 2022, 299, 910–930. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (uavs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Pasha, J.; Elmi, Z.; Purkayastha, S.; Fathollahi-Fard, A.M.; Ge, Y.E.; Lau, Y.Y.; Dulebenets, M.A. The Drone Scheduling Problem: A Systematic State-of-the-Art Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14224–14247. [Google Scholar] [CrossRef]
- Konar, M.; Turkmen, A.; Oktay, T. Improvement of the thrust-torque ratio of an unmanned helicopter by using the ABC algorithm. Aircr. Eng. Aerosp. Technol. 2020, 92, 1133–1139. [Google Scholar] [CrossRef]
- Sal, F. Analysis of combined passively and actively morphing blade root chord length and blade taper for helicopter control. Aircr. Eng. Aerosp. Technol. 2020, 92, 172–179. [Google Scholar] [CrossRef]
- Giusti, A.; Guzzi, J.; Ciresan, D.; He, F.L.; Rodriguez, J.; Fontana, F.; Faessler, M.; Forster, C.; Schmidhuber, J.; Di Caro, G.; et al. A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots. IEEE Robot. Autom. Lett. 2016, 1, 661–667. [Google Scholar] [CrossRef] [Green Version]
- Lee, D.; Hess, D.; Heldeweg, M. Safety and privacy regulations for unmanned aerial vehicles: A multiple comparative analysis. Technol. Soc. 2022, 71, 102079. [Google Scholar] [CrossRef]
- Reinelt, G. TSPLIB—A Traveling Salesman Problem Library. ORSA J. Comput. 1991, 3, 376–384. [Google Scholar] [CrossRef]




| Instances | Murray and Chu [3] | Dell’Amico et al. [10] | Raj et al. [13] | CP | ||||
|---|---|---|---|---|---|---|---|---|
| Size | Sec | Sec | Sec | Sec | ||||
| Avg | StDev | Avg | StDev | Avg | StDev | Avg | StDev | |
| 10 | 0.32 | 2.02 | 0.08 | 0.57 | 0.03 | 0.31 | 0.02 | 0.20 |
| 20 | 77.78 a | 180.00 a | 109.55 | 28,698.71 | 0.86 | 47.95 | 0.17 | 1.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montemanni, R.; Dell’Amico, M. Solving the Parallel Drone Scheduling Traveling Salesman Problem via Constraint Programming. Algorithms 2023, 16, 40. https://doi.org/10.3390/a16010040
Montemanni R, Dell’Amico M. Solving the Parallel Drone Scheduling Traveling Salesman Problem via Constraint Programming. Algorithms. 2023; 16(1):40. https://doi.org/10.3390/a16010040
Chicago/Turabian StyleMontemanni, Roberto, and Mauro Dell’Amico. 2023. "Solving the Parallel Drone Scheduling Traveling Salesman Problem via Constraint Programming" Algorithms 16, no. 1: 40. https://doi.org/10.3390/a16010040
APA StyleMontemanni, R., & Dell’Amico, M. (2023). Solving the Parallel Drone Scheduling Traveling Salesman Problem via Constraint Programming. Algorithms, 16(1), 40. https://doi.org/10.3390/a16010040