1. Introduction
Rapid growth in remote sensing (RS) technologies and deployed satellite missions has led to substantially large remote sensing imagery datasets. A single remote sensing mission can have multiple different apparatuses that simultaneously and continuously collect data. For example, the Sentinel 2 satellite missions are comprised of two launched satellites (Sentinel 2A and 2B) collecting multi-spectral images, with the latter producing 1.6 terabytes of data per day. The diversity and complexity of RS data give validity and definition to the RS big data problem [
1]. Many techniques used to explore and categorise these images for downstream analysis require previously labelled samples to be able to train and test algorithms on unseen imagery. Increasing the volume and diversity of labelled samples gives more confidence that we can attribute to any given algorithm as it has been tested on a more diverse sample range. However, acquiring a sufficiently large and accurately labelled dataset of images for any given RS technology and technique requires immense effort from an RS expert analyst [
2].
Ultimately, this results in a significant problem of sorting data of interest from the ever-growing volume and diversity of image datasets. Producing labelled images for analysis requires a large effort from remote sensing specialists when considering temporal differences for one location, which is then compounded by involving multiple locations. Providing context to images by binning them into categories or labels from a human perspective is to understand the physical matter and contextual arrangement of pixels within an image. The physical matter of any individual pixel can be discerned by the reflected wavelengths of light detected by the studied imaging platform, e.g., for a red green and blue image, plant matter is green. Increasing the diversity of detected wavelengths from a simple RGB composite image can improve our understanding of materials, which is why modern satellite missions include infrared detection capabilities facilitating the use of hand-crafted feature extraction methods such as Normalized Difference Water Index (NDWI) [
3] and Normalized Difference Vegetation Index (NDVI) [
4]. However, such techniques ignore the geographical arrangement and contextual information within an image, as certain features are often located near each other, e.g., buildings and roads, mountains and tributaries, etc. [
5]. Images that have the same physical matter or arrangement similar to a known sample will have a similar value from a hand-crafted feature. To discern whether the score is similar or not, techniques like K-means clustering, SVM, LDA or GMM’s are utilised [
6,
7]. Expanding these techniques to accommodate unseen samples or non-trivial problems could require clustering all old and new samples again, in addition to redefining the hand-crafted features to include the new subtleties within the data [
8].
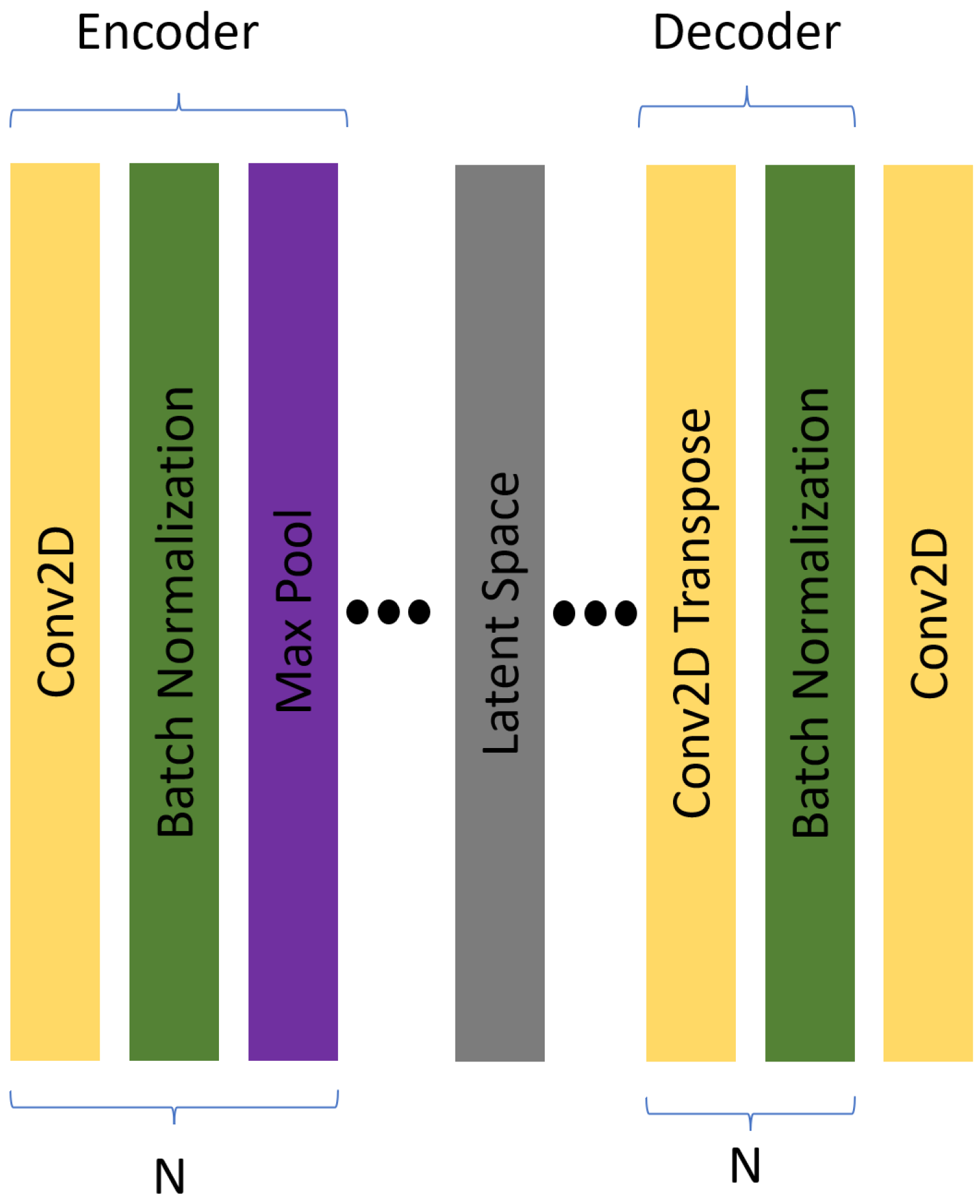
These hand-crafted features have in recent years been replaced by the use of deep convolutional neural network (DCNN) techniques. A DCNN produces optimised filters for the analysis of images based on the textures present creating complex non-linear representations. Building on Stacked Auto Encoders (SAE) [
9] convolutional autoencoders add spatial learning abilities by introducing learnt filters and activation maps, allowing the model to learn local texture representations and inter-channel information. This architectural design for feature representation has demonstrated considerable success in remote sensing, as evidenced by various studies [
10,
11,
12,
13]. There are many variants of AEs that have also been utilised, such as Variational AEs (VAEs), that replace the latent space with a distribution instead that have been used in, for example, image captioning [
14], desertification [
15] or biomass prediction [
16].
Querying images for similarity can be seen in the field of Image Retrieval (IR) within the RS field [
17]. IR algorithms apply a form of top
K retrieval, where
K denotes the number of samples to be retrieved. Solutions for encoding functions within IR also utilise AE architectures for unsupervised feature extraction [
18]. However, this approach limits the user to a variable number of images returned and requires an initial query image. In order to consider all images within a dataset there are further dimensionality reduction techniques that find manifolds of similar images. This approach has been considered with regard to time-series data [
19,
20] and time-series clustering [
21].
Manifold projection involves mapping high-dimensional data into lower dimensions and can be formulated as attempting to keep pairwise distances as defined in the higher dimensional space as similar as possible to pairwise distances within the lower dimensional space, such as classical multi-dimensional scaling (MDS) [
22]. Dimensions in this context refer to the number of variables representing the information. Different approaches to reduction may look to find low-dimensional representations of nonlinear manifolds or patterns in high-dimensional space [
23]. For singular manifold representation, common algorithms include MDS, isometric mapping (ISOMAP), and locally linear neighbourhood (LLE) [
24,
25]. When considering multiple manifolds in high dimensional space, efficiency dictates comparing pairwise points in local space rather than the global pairwise distance between all points. A similarity matrix can be created that focuses on connecting similar neighbours and an assumption that many short paths (small geodesic distances) between points indicates these points are likely part of the same underlying structure in the data. Existing algorithms that do so for multiple manifolds include variations of ISOMAP, LLE, Hessian LLE or Laplacian Eigenmaps, each with varying suitability to certain tasks and limitations [
26].
Stochastic Neighbourhood Embedding (SNE) computes the locality between points in a neighbourhood converting samples into probabilistic samples based on the Euclidean distance [
27]. The low-dimensional embedding is created by enforcing the low-dimensional probabilities to be similar to the higher-dimensional embeddings. SNE proved capable of preserving local neighbourhoods in lower dimensional space; however, it suffered from many points overlapping in the projection, referred to as the crowding problem [
28]. t-SNE was introduced to allow for effective visualization of multiple, related, high-dimensional manifolds by revealing structures at many different scales [
29]. To overcome the crowding problem t-SNE was introduced where a long tail distribution was introduced to the lower dimensions, in contrast, the use of a heavy tail distribution has been shown to tighten clusters [
29,
30].
UMAP [
31] is similar to t-SNE, in that both use gradient descent to optimize the embedding space. UMAP construction is based on a fuzzy graph approach of the high dimensional embedding in an attempt to accurately represent the topology. The low-dimensional embedding is then optimised to conform to the high-dimensional graphs and weights. UMAP aims to provide a more global context to the low-dimensional embedding comparatively to t-SNE, which can be attributed to the initialization of the low dimensional embedding space created by a fuzzy graph [
32]. Many recent papers debate the similarities and differences between these two algorithms. In summary, both t-SNE and UMAP produce similar results when given similar initial conditions and both have been shown to be sensitive to starting parameters and low embedding [
33].
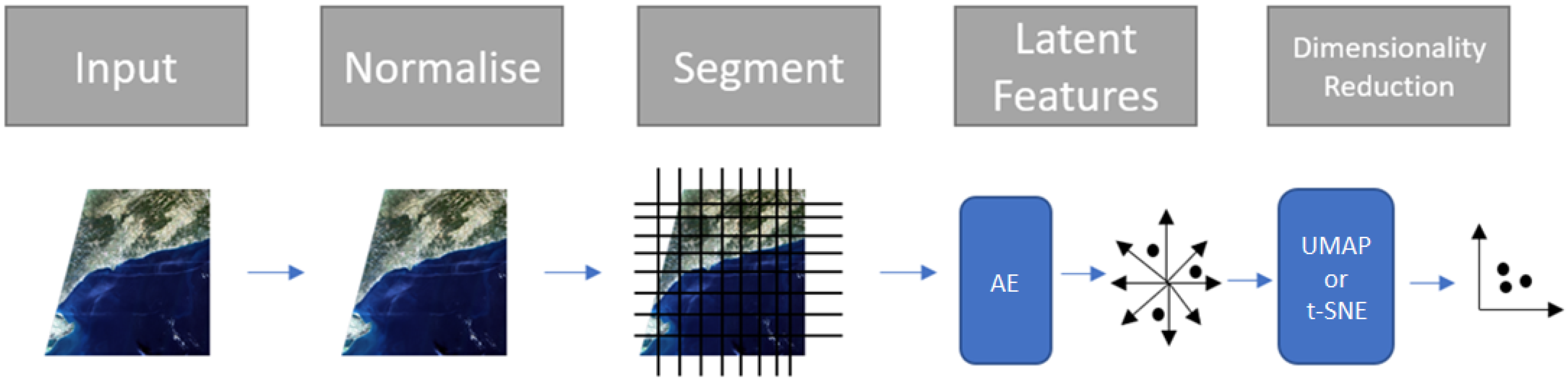
Our approach presents the user with a mass labelling interface enabling them to explore a dataset of satellite images. Class labels can be applied to multiple images at a time during user selection of those images in the interface. The classes are determined by the user and correspond to the visual features they want to extract, separate or label. Our interactive approach, utilising manifold projection, allows similar images to be selected simultaneously, which aids labelling. The use of visualisation techniques highlights different geographical features within images and how they relate to the trained filters of a CNN. Any complex dataset results in a lossy representation for both AI models and manifold projection, when regarding all features and variations, hindering a user from simply selecting and labelling large volumes of data with ease. As models require considerable time for training, we look to reduce the impact of information lost in manifold projection by utilising interactive visualisations. By allowing the user to interact with how these projections work, they can control and tease out better class separation from their fixed model, thus enabling a greater labelling throughput. This is discussed in more detail with examples in the next sections.
3. Results
Accurate classification of remote sensing satellite images plays a crucial role in various applications, such as mapping, urban planning, and environmental monitoring. Key to the creation of robust and accurate image classification algorithms is the creation of large, geographically distributed labelled datasets that represent the complexity and diversity of the Earth’s surface. The creation of such labelled datasets is time-consuming, resource intensive and uncertain, as it is difficult for remote sensing analysts to easily quantify and understand the complexity and diversity present within a geographically distributed unlabelled dataset.
Labelling satellite images is necessary for both producing up-to-date maps and creating new labelled datasets for training new models. Finding selective images that contain desired features for a new training dataset can be a daunting task considering the volume of tiles over time and geographical location. Training models on satellite images incur a large cost in both training and finding suitable data to train on.
The inputs to our labelling application are the satellite images that need to be given class labels, a trained model (e.g., the autoencoder we use for testing), and any prior labels (e.g., saved from a previous labelling exercise). The output will be class labels for the images.
A key point is that the pre-trained model may provide good cluster coherency, but often there will be out-of-class samples that will negatively impact the labelling experience and hence the time to undertake labelling. Our interface helps this by allowing the user to explore the manifold by creating user directed two-dimensional embeddings from the high-dimensional embedding. The user can control the development of the embeddings, use the branch and merge feature (discussed later), switch between embedding types (UMAP or t-SNE) and extrapolate class labels forwards and backwards through embedding iterations.
The case study is provided in cooperation with the UK Hydrographic Office. Our approach can be used with various applications in mind. For example, to quickly label similar samples we aim to bring large numbers of tiles with similar features together in the interface to apply a single class label in bulk. Another example would be to build a data set with a good distribution of rich and diverse features, where in that case we may focus on cluster boundaries to provide images with combinations of different features and differences from the cluster.
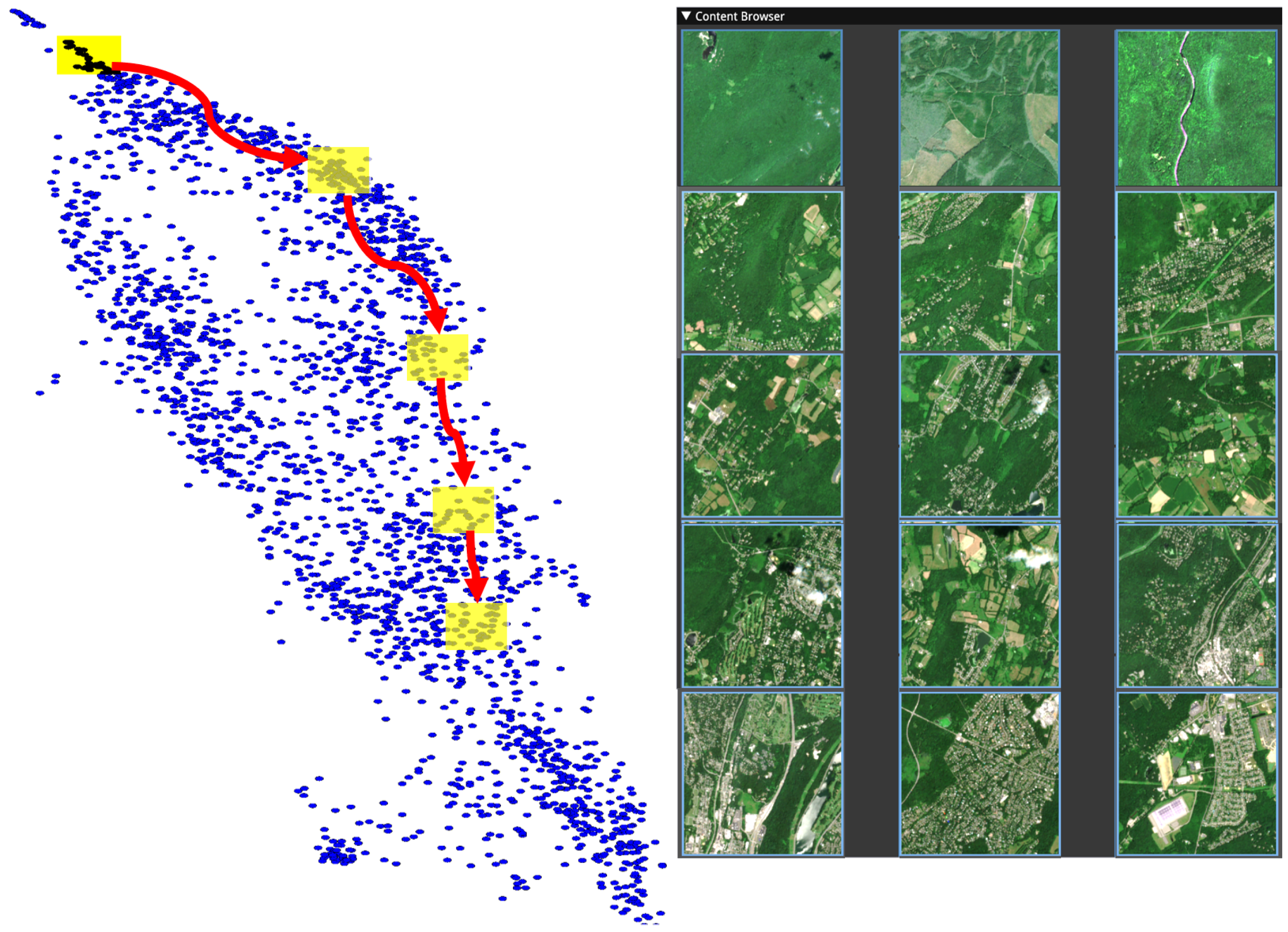
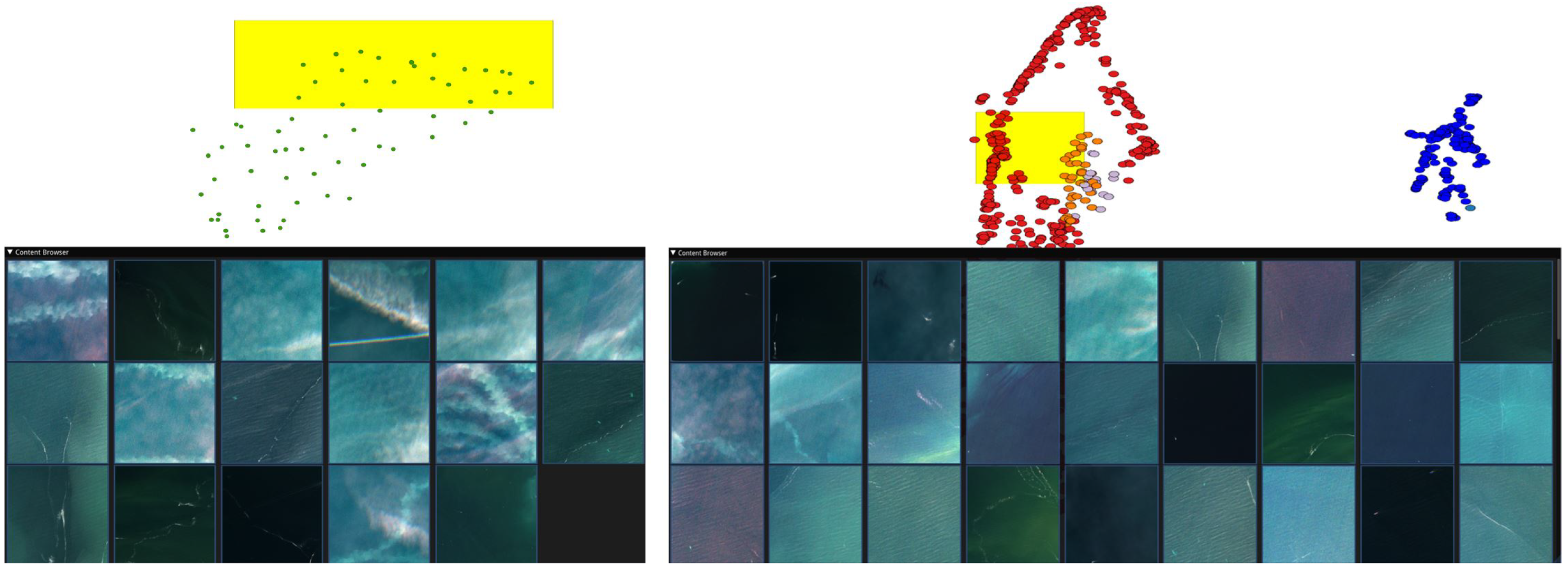
Manifold exploration: We explain how the user interacts with a two dimensional embedding to gain an understanding of the higher-dimensional manifold and to label multiple images simultaneously with a class label. The user draws a selection box of a desired size over the plot (yellow box in
Figure 4). Each point within the selection corresponds to one image, which is displayed in the image browser and located on the map. All images within a selection can be given the same class label. If any images are not part of the class, they can be individually reset or set to a different class using the image browser. The user can navigate the scatter plot by scaling and translating.
The user drags the selection box so that points exit and neighbouring points enter the box. This simultaneously updates the image browser and map view, thus allowing the user to explore and become familiar with the structure of the manifold. Fine movement can help produce views where all images are consistent with one label, allowing a single label to be rapidly given to all points in the selection. In
Figure 4, the user follows a path as indicated by the red arrows and yellow boxes, and sample images along the manifold from within the yellow boxes are presented in rows respective to the sampling region. These demonstrate how this model and two-dimensional embedding have placed images from the manifold. The block of images on the right shows three representative images from each of the indicated selection areas demonstrating the smooth evolution of the manifold from forest to urban land cover.
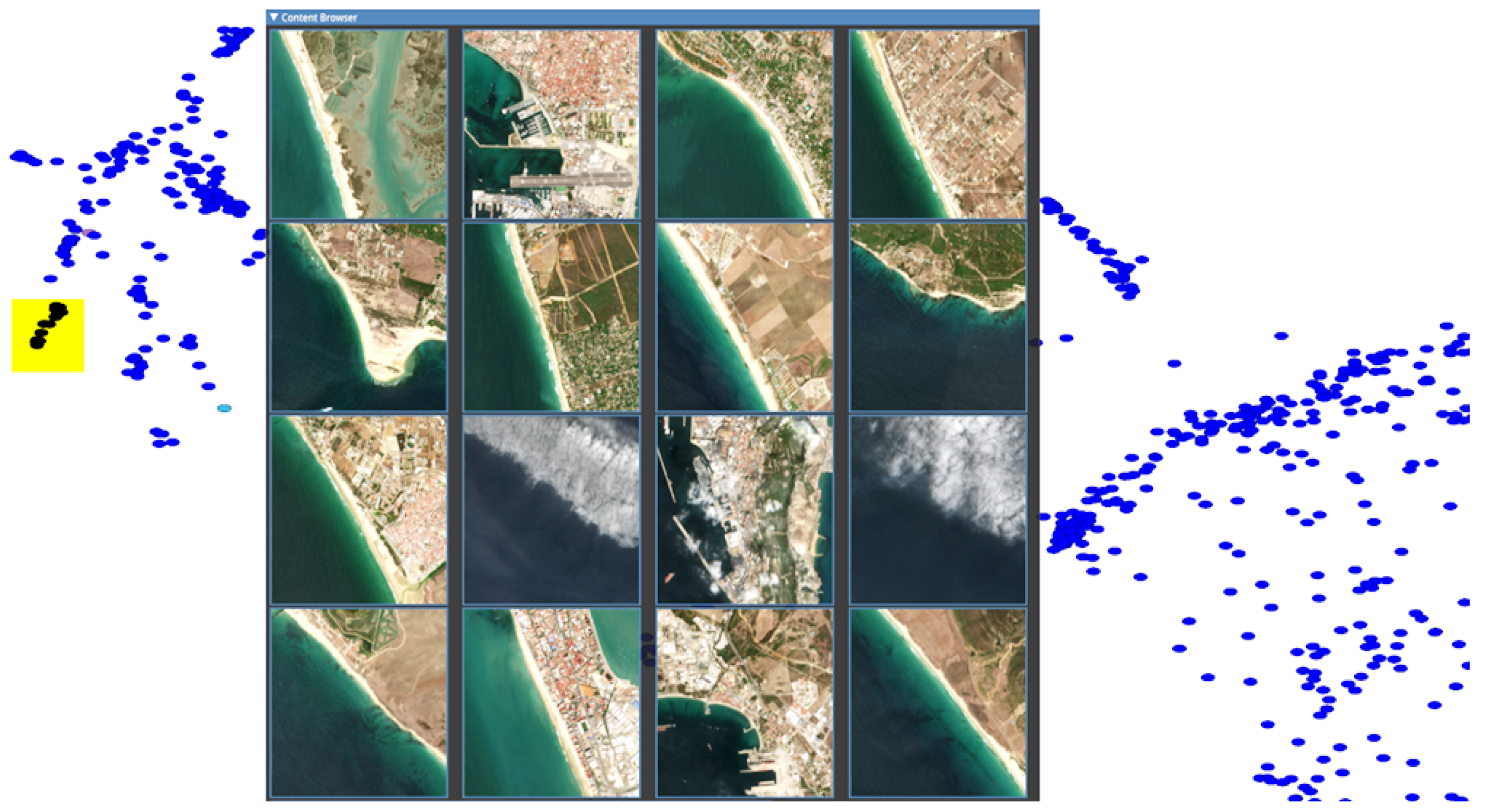
Figure 5 shows 16 images in the browser window over the top of the scatterplot view. The images are from a small cluster on the left and show largely consistent clustering, but also demonstrate how the limits of a pre-trained model can affect labelling software. In this case, the reflectance and texture of cloud images have not been separated from the reflectance and texture of similar coastlines. The interface allows these labels to be quickly corrected individually. Users can label the data efficiently with a keyboard input as they explore the manifold.
Manifolds shown in the two-dimensional plot are formed by both the AE’s expressiveness on the source images and the number of samples that the DR technique is provided with. When projecting all images from the SWED dataset, there is a clear separation between land and water clusters, but images containing both features (coastline) are on the edges of those clusters or form paths between the clusters. See the video in additional material for an example of coastline labelling.
User-directed reprojection of the embedding: The two-dimensional scatter plot view may not be optimal due to two reasons. Firstly, the model’s latent space may not be expressive enough. Secondly, which is the focus of this section, the dimension reduction techniques have insufficiently exploited the latent space to successfully create the two-dimensional embedding. We work under the assumption that the AI model is fixed due to the fact that training remote sensing models requires a tremendous amount of resources, and therefore we cannot alter the latent space interactively. Rather, we look to optimise the embedding instead.
To find a better embedding we allow the user to direct re-embeddings by testing different parameters such as perplexity for t-SNE or N neighbours for UMAP. Increasing the value of both parameters allows for the DR algorithms to consider a larger neighbourhood, which provides more context to each embedded point. Conversely, if two manifolds exist in high dimensional space that overlaps frequently, a smaller neighbourhood of points would be preferable.
Therefore, it is crucial that the user can interact with parameter selection (B in
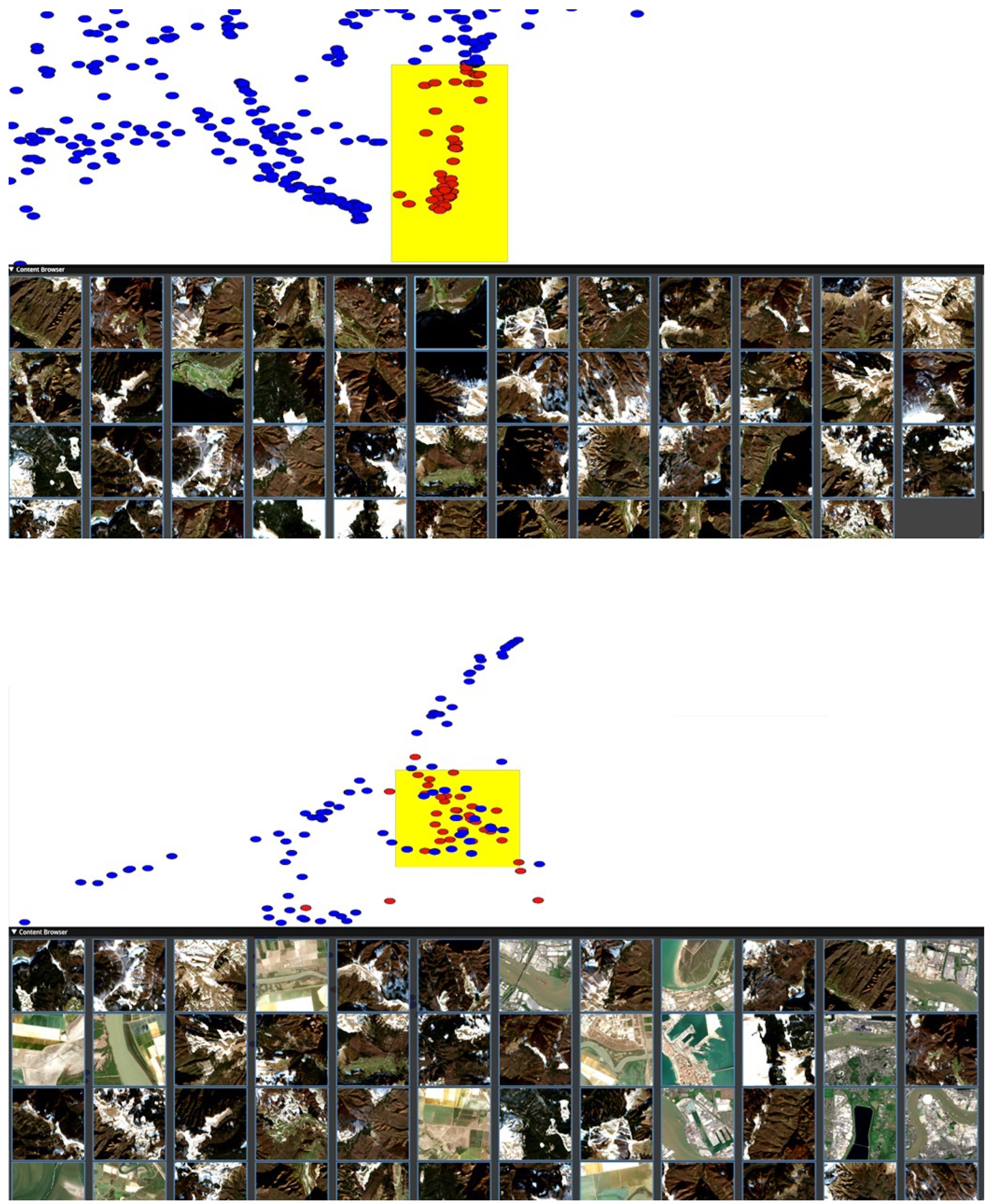
Figure 3). However, recalculation of the embeddings on the entire dataset requires a high computational cost and exploration cost as new embeddings require validation of information patterns by the user. Constant evaluation of newly projected manifolds can be mitigated with our tool because labels can be extrapolated when switching embeddings (between UMAP and t-SNE) and when altering any of the parameters. This consistency in class labels can provide the user with context, e.g., how previously neighbouring points may now cluster or spread across the updated embeddings. In
Figure 6, t-SNE (top) has clustered mountainous images (with glacier), allowing the user to apply a label with a single key press. Below,
Figure 6, UMAP (bottom) has not differentiated such images from other terrain. By labelling using t-SNE, and then changing embeddings, we can see how the labelled points redistribute and mix within other samples. It is not generally the case that t-SNE performs better, rather being able to switch embeddings or re-embed using new parameters allows the user to find appropriate clusters.
Branch and merge: As an alternative to global embeddings, we introduced the ability to branch the dataset. Branching focuses the dimensionality reduction on the currently selected data. The two-dimensional embedding is optimised with respect to those samples as only those samples are considered. The computational cost is less due to the reduced number of samples when searching for optimal embedding parameters. The data for a particular branch is determined by the user indicating which class label or classes are to be used for that branch. All images labelled as that class form the branch. The user may select data directly on the two-dimensional plot using the selection box, apply a class label, and send that set of points to a branch. To self-contain branches, all embeddings utilise the UMAP or t-SNE algorithms for optimisation in their own sand-boxed environment without affecting any other dataset or branch.
Working with this reduced set of samples has two benefits. First, embeddings are faster to compute when varying parameters during exploration. Secondly, as the samples will have been determined by the user to have similarities, re-embedding them will effectively amplify the remaining feature differences yielding new clusters based on the alternate features. The new embedded clusters may separate better than the original given the same pre-trained model output.
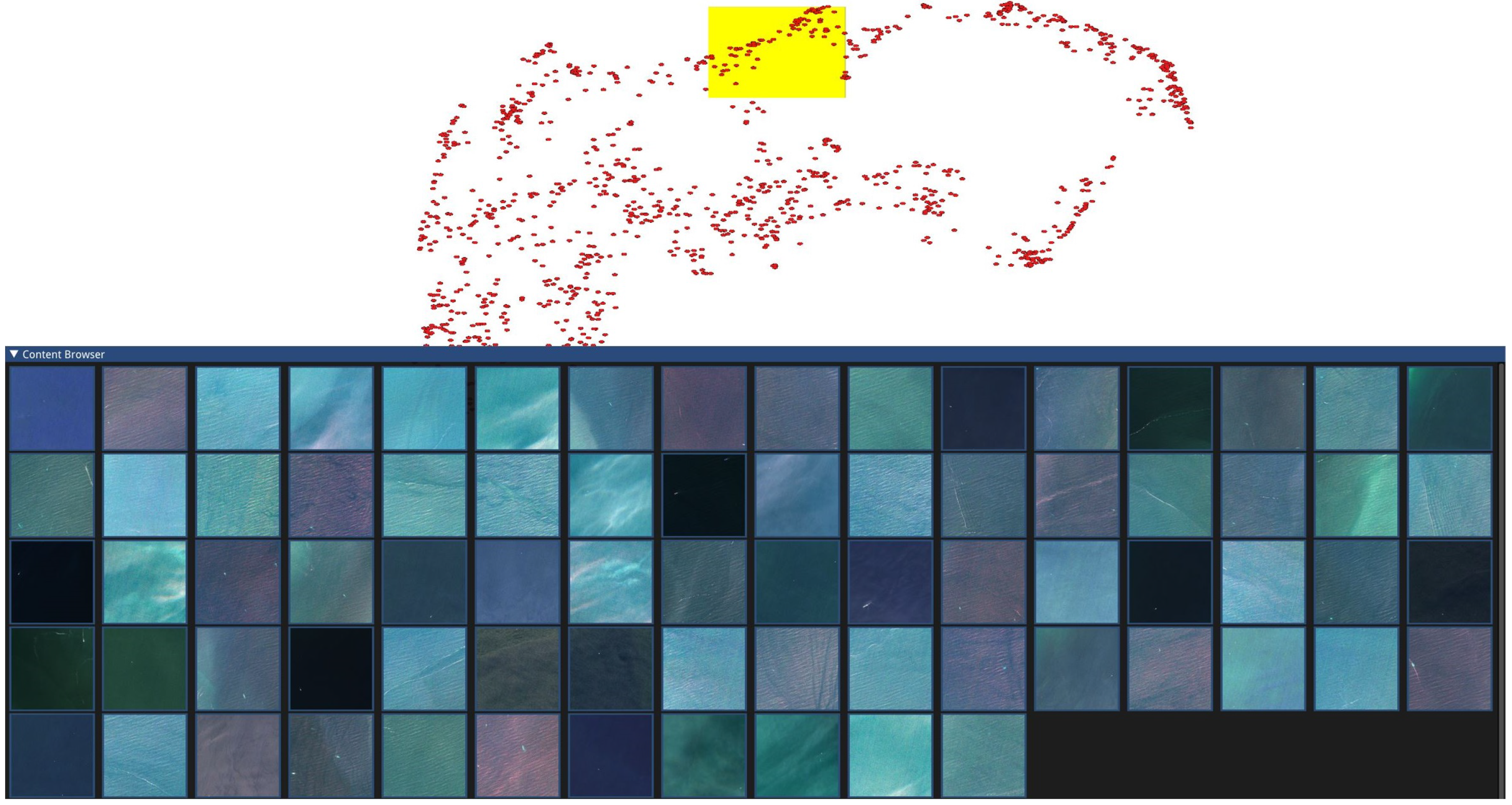
Figure 7 shows a branch of data from
Figure 5, which largely represents images with only sea and varying coverage of coastline. In the global embedding, they clump together in a smaller cluster in which it would be difficult to make selections that separate these classes for labelling. Branching out these points allows a re-embedded of the points, resulting in the embedding seen in
Figure 7. In this case, the points scattered along the top of the new plot are predominantly the images that contain just the sea, allowing the user to make large selections of tens to hundreds of images and directly apply one class label.
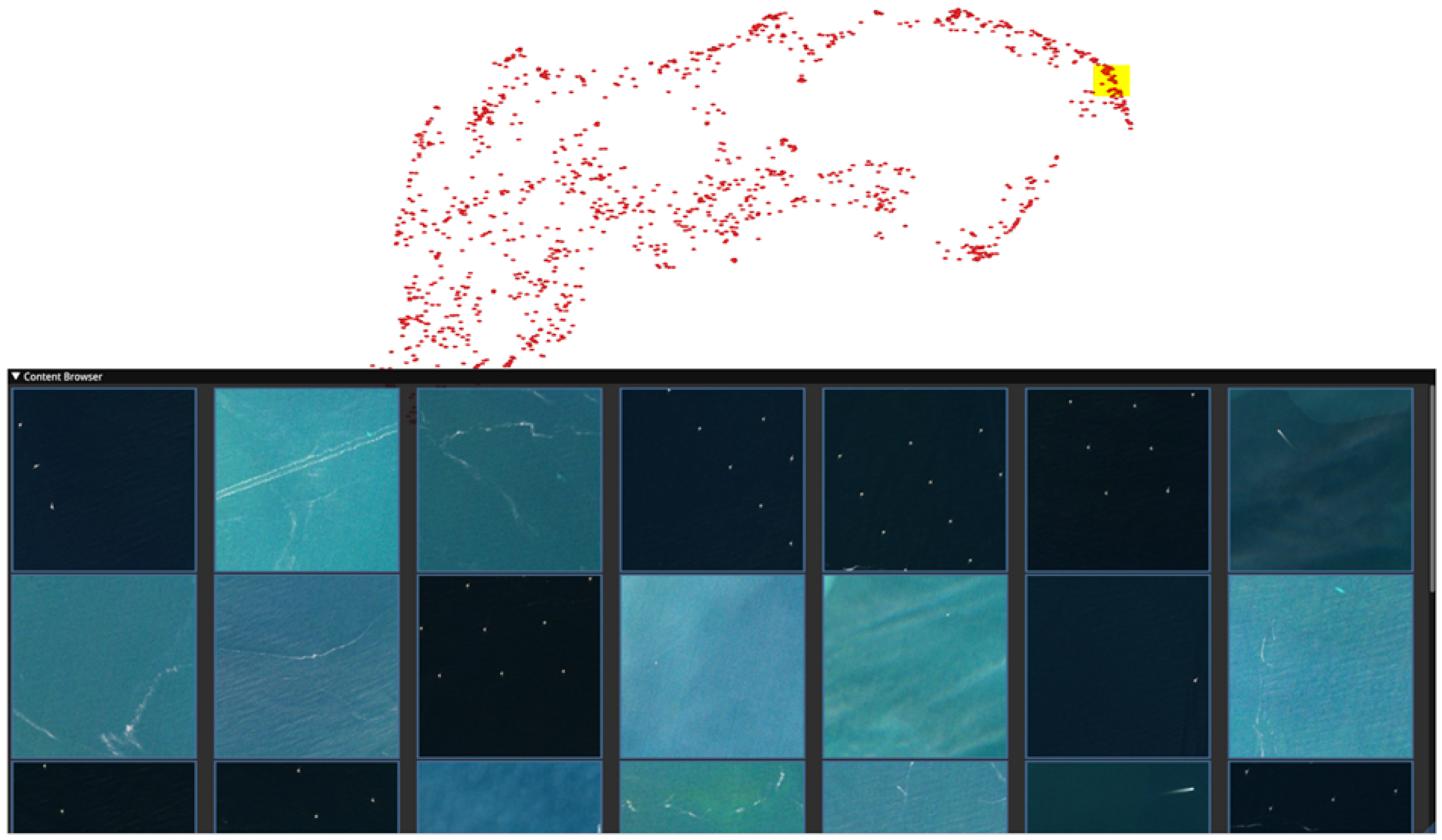
Moving along the top of the plot and to the right (
Figure 8) introduces a new wind farm feature where we can see a regular grid of white turbines against the dark blue sea suggesting the user would be able to quickly label sea infrastructure as a separate class if desired.
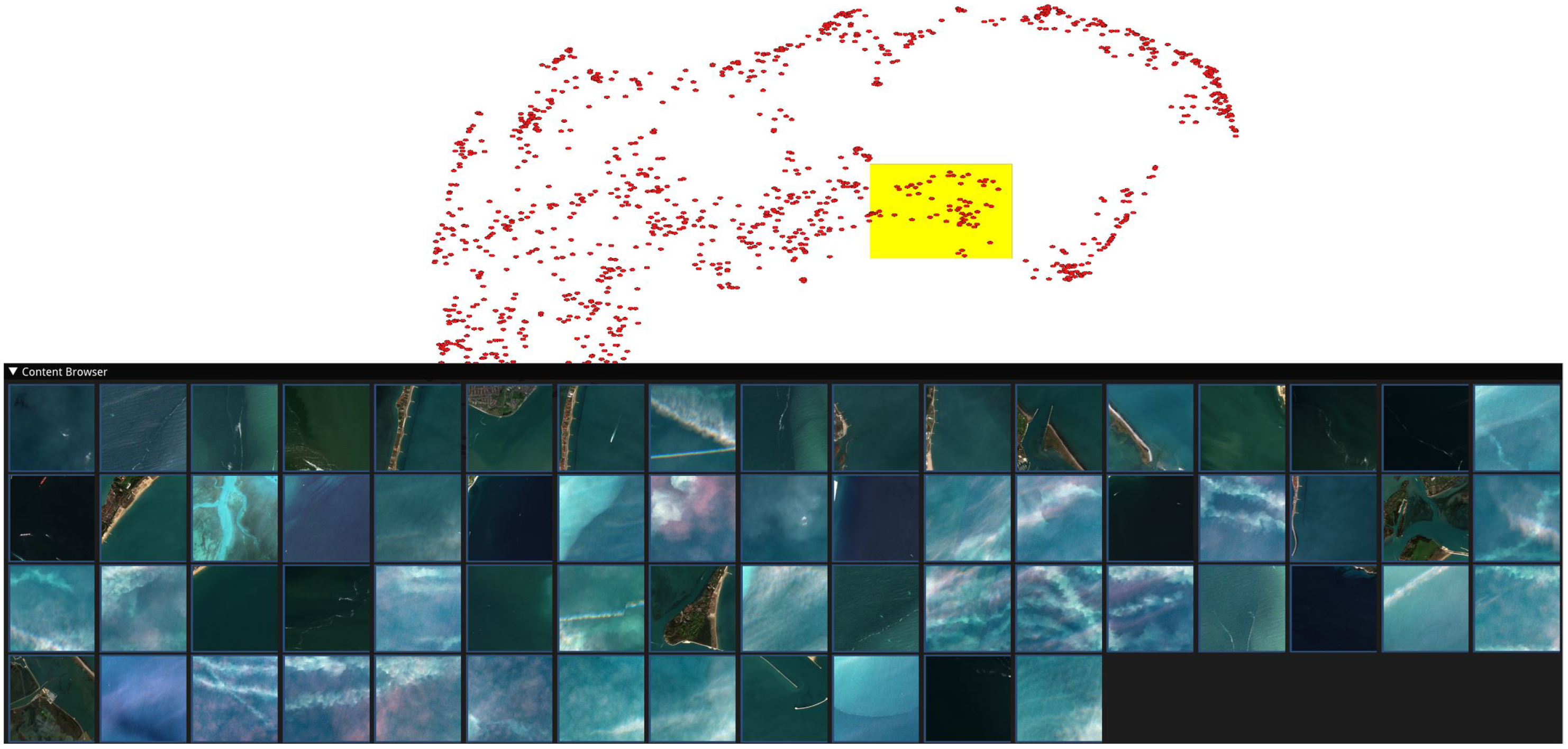
Further around the plot (
Figure 9) there is a mix of coast, high cloud and sea that has not been effectively separated and therefore would be time-consuming to label. This can also be branched out into its own where the sea is more effectively separated in this new embedding (
Figure 10 (left)). Labels are then merged back into the main embedding (
Figure 10 (right)) showing the separation (or lack of) between these classes. This allows fast labelling of the data, which also allows the user to visualise the class boundary, allowing an assessment of model performance by suggesting where the model may be failing to provide good class separation.
We also find that branching is effective in another way. If a user wants to label patches with multiple features, for example, coastal areas with farmland present, they can branch and embed all coastal patches together with a selection of patches that contain only farmland. The embedding will create unique clusters for each feature; however, samples that have both features will lie on the edge of the cluster closest to the cluster that contains the other feature. In this case, samples with both coastline and farmland will be on the edge of the coastline cluster closest to the cluster containing purely farmland. In this way, branching can act as a way to query image features in clusters by leveraging the model’s general ability to distinguish between them.
User Study
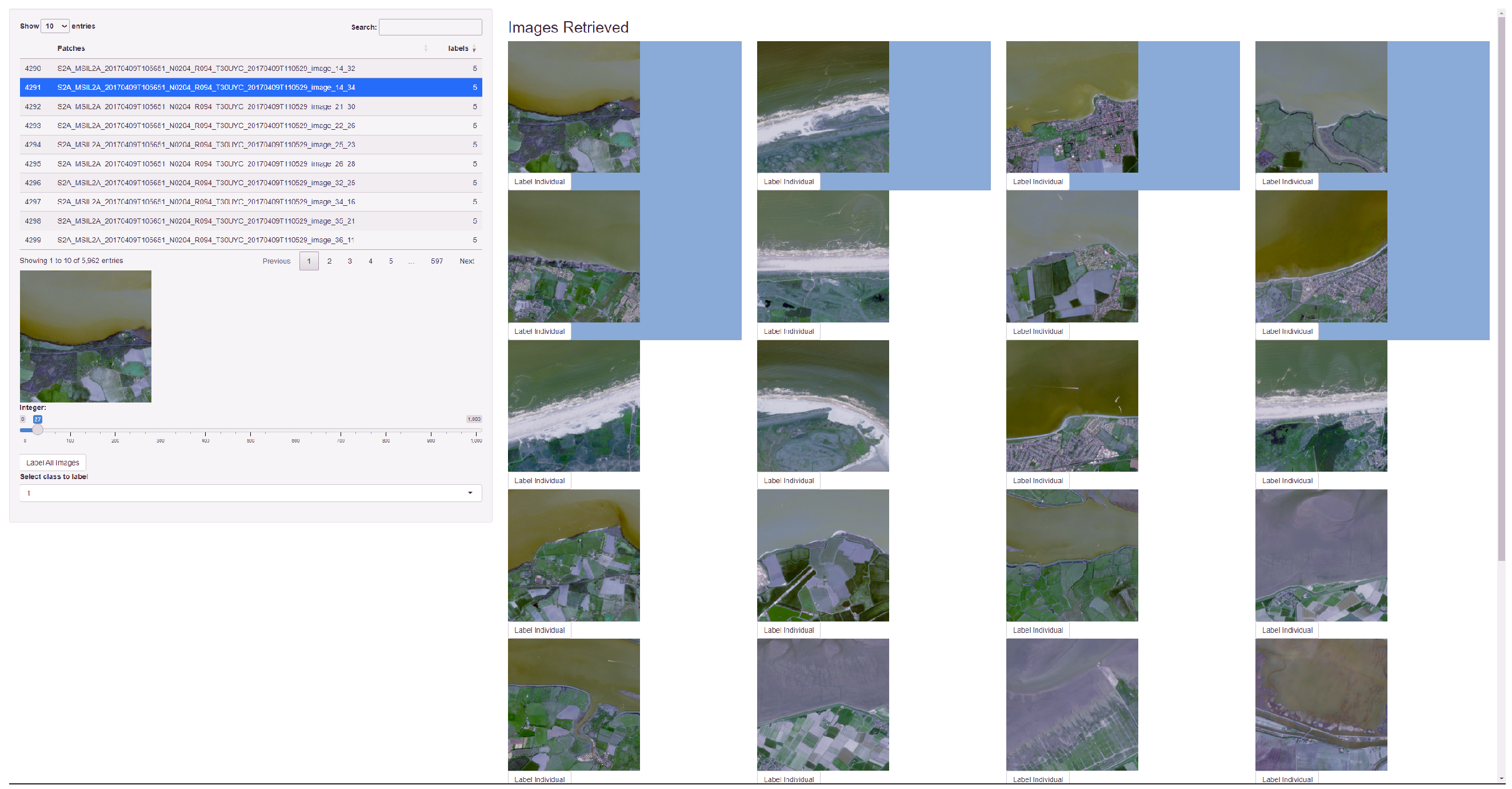
In this section, we introduce a second application (
Figure 11) to act as a comparison in a user study. We compare the efficiency of finding coastal patches utilising an image retrieval application as a benchmark, as our pipeline can be interpreted as a visual extension of image retrieval systems. The benchmark application produces
K similar images based on a query image. The
K nearest neighbours are determined by distance in the autoencoder latent space. The target query image is shown with the most similar
K images. The user can label all images returned by the query or individually label each sample.
To access the capability of each application we conducted a small user study with five participants. The user study consisted of each applicant labelling patches with any coastline utilising both applications. We presented the participants with forty initial “seed” images, as otherwise, the benchmark application required sorting through a list of 5963 patches to find an initial coastal patch to begin labelling from. The same “seed” patches are pre-labelled within our application as one class.
The task was to label 160 patches with coastline using each application. We allowed participants to label more patches than required accounting for any scenarios where labels were assigned with the intention to refine after. The method to end the study was based on a small GUI element that let the researcher know that the labelling requirement had been met, allowing them to make an informed decision on when to let the participant stop labelling. We switched the order in which both applications were presented to each user in order to keep any familiarity gained with RS images consistent. As both t-SNE and Umap are stochastic algorithms we retained the initial randomisation seed between participants. In addition, we removed multi-threading and approximations utilised by the dimensionality reduction algorithms in order to keep consistency between participants. Times were recorded for each patch labelled. In order to produce the results, any patches labelled multiple times were removed with only the final label assignment considered.
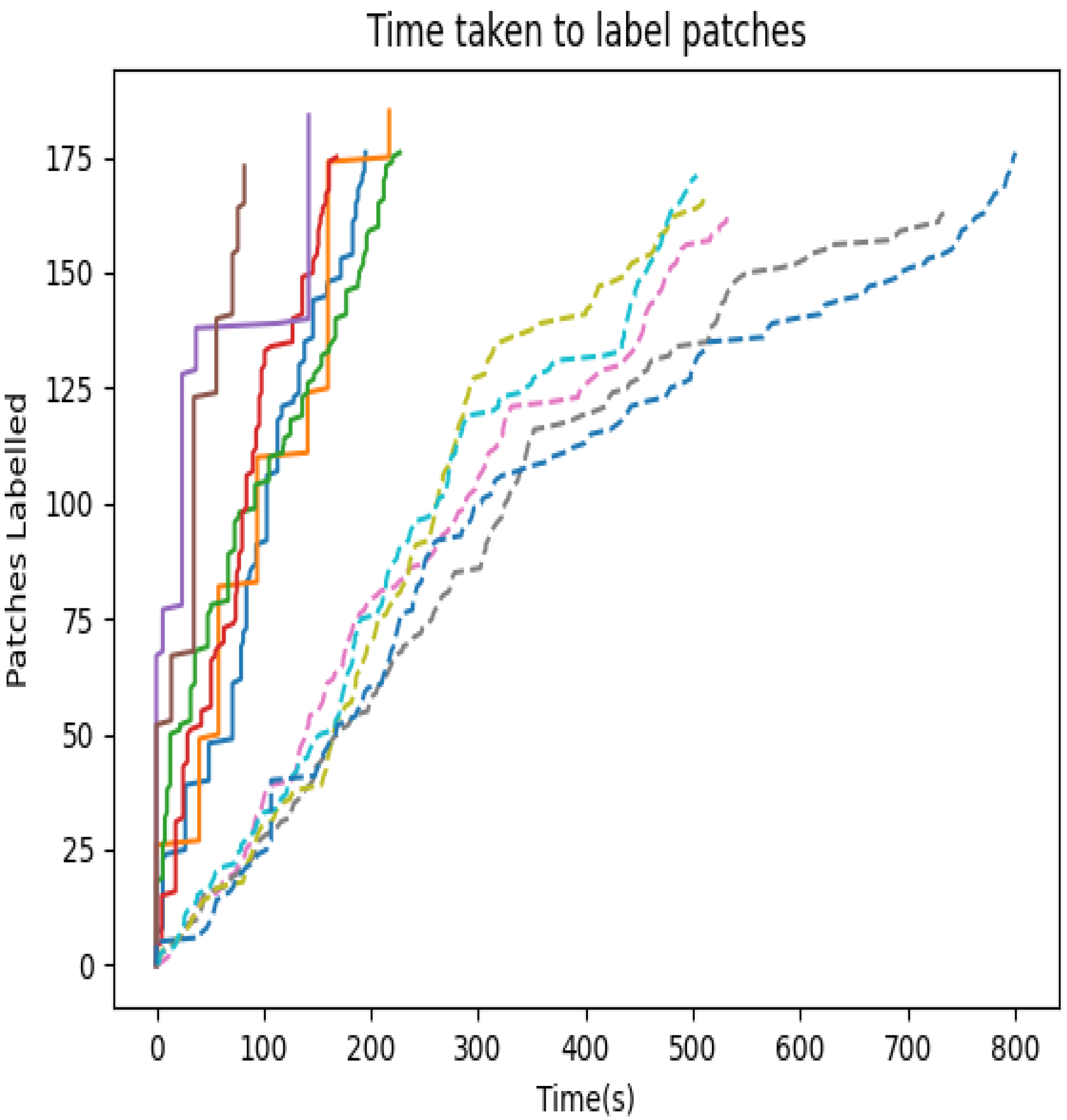
The results of the user study are shown in
Figure 12. On average, the time taken to label using the benchmark application was 269 s compared to our application’s 71 s, which is a factor of more than 3 times faster. Users utilising the benchmark application often found that only a small number of patches could be retrieved without the appearance of out-of-class images, which reduced the ability to label all samples quickly and efficiently therefore resulting in single sample labelling. In contrast, in our approach, the ability to optimise the box size and explore its surroundings produced similar images within the embedding, allowing the user to discern a suitable selection, which retained minimal out-of-sample patches and allowed the user to refine the selection with more confidence. The fastest user strategy recorded utilising our application searched the space before selecting clusters with more coherent samples and only a few outliers. In contrast, the other common labelling strategy used was panning a small selection area with continuous movement and refinement. The difference can be seen in
Figure 12. The sharp increase in labels corresponds to labels applied to a larger selection area at once in contrast to the smoother gradient when labelling with a small selection strategy, respectively. It is also noticeable that users of the benchmark application experienced fatigue as they approached the target and had difficulties finding more coastline to label, whereas users of our application did not experience that problem. This is visible in the shallower gradients in the data for the benchmark application as time goes on compared to the steeper gradient for our application.
4. Discussion
Designing a training and testing dataset for the development of computer vision algorithms for use in satellite imagery is time-consuming, resource-intensive and uncertain. It is difficult to be confident that a labelled dataset encompasses sufficient complexity and diversity to allow for the geographic generalisation of a trained algorithm to unseen areas. It is practically difficult to visualise large and geographically distributed datasets and “debug” the performance of a trained algorithm once its performance is assessed against a test dataset.
Our tool offers new capabilities for us to reduce the time and resources required to label large datasets, visualise and understand the complexity and diversity of already labelled images, and assess model performance against clusters of similar image types, which might be geographically distributed over large and diverse environments. Overall, our tool will give us greater insight into the structure of unstructured satellite imagery data, supporting us to iterate model development with greater efficiency and confidence.
With regard to processing and labelling datasets for future training of classification models, we have shown how structurally similar samples are clustered together and evolve along a manifold, allowing for the intuitive selection of samples from all geographical regions. Samples evolve as you move from a cluster, where samples with more unique features appear on the cluster boundaries. Users are able to select and label similar features and build up feature-rich data sets.
Most works in remote sensing target specific regional locations to alleviate the vast complexity between tile locations and time. Utilising our tool, we show how analysis of multiple tile locations beforehand could contribute to providing balanced datasets for future classification tasks. User-led mass labelling could provide more contextual information based on the classification goal, e.g., lakes, farmland use, arboreal or coastline to name a few.
Common image dataset tools in current works regard finding the top
K images that correspond to a query set of images. Most, such as Tong et al. [
40], produce feature sets using common image retrieval algorithms and fine-tuning with smaller patch sizes, but based on higher resolution labelled datasets. We have in comparison shown the feasibility of utilising manifold learning techniques to enable entire datasets and relationships between images to be displayed. This has been effective in mass labelling larger feature sets. When considering smaller local features, we utilise our branching methodology. Future work could also encode smaller patches with extra information regarding surrounding patches, increasing the focus on smaller features, but retaining a more global context. This of course would have to be balanced between computational efficiency for embeddings as larger latent spaces or sample rates increase the time complexity to calculate embeddings.
In comparison, for better potential label separation, we could iteratively alter our higher dimensional space by pushing dissimilar images from an oracle or user’s perspective away and pulling similar images closer. This process in machine learning is known as triplet loss [
41]. Successfully applying triplet loss improves the downstream visualisation capabilities as manifolds separate clearly. However, this process would require retraining on the new high-dimensional embedding space, and constant oracle/human input where labels can heavily influence models’ class separation. With such feature-rich patches, this could cause overlap between labelling categorisation, for example, where a particular patch includes multiple regions of interest, i.e., farmland and rivers. An avenue for future work could look to implement a form of triplet loss with a multi-hierarchical labelling scheme utilising the visual branching feature we presented.
In addition, the utility of understanding the performance of a model between the RS images utilised in training and the resulting complex learnt filters by the convolutional AE is paramount in any use case. The user can gain estimations of model performance by altering the manifold learning representations and examining the visualisation provided by the projected manifold. Our methodology could be adapted to any model where a temporary layer can be trained to extract an embedding space. Limitations are the size of the representation of each image, larger high-dimensional spaces require more time to project. The resulting embeddings within the tool provide contextual information about how samples are built by the model and where problematic features may arise in images.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











