
Blockchain PoS and PoW Consensus Algorithms for Airspace Management Application to the UAS-S4 Ehécatl †


Abstract
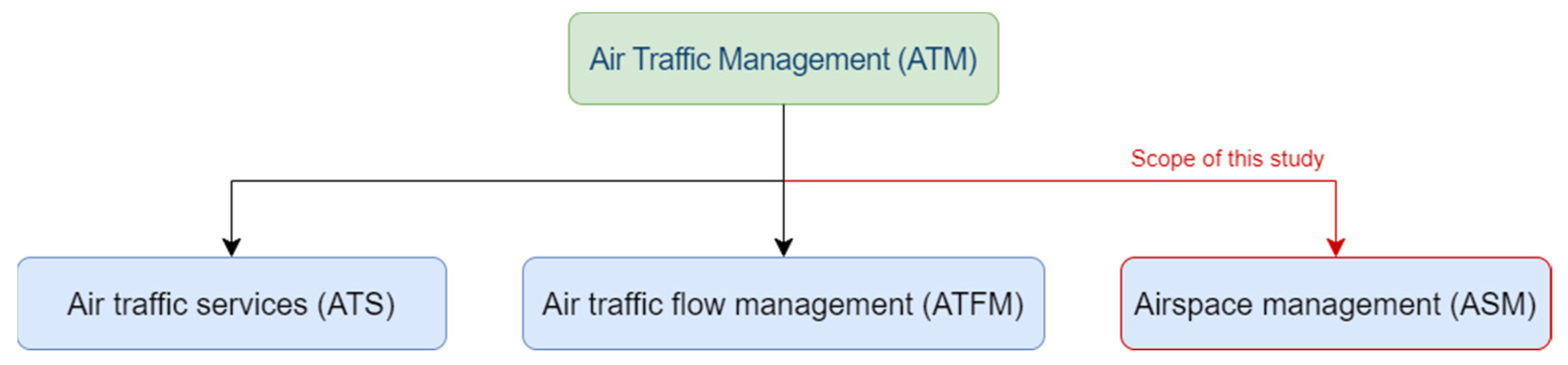
:1. Introduction
2. Problem Statement
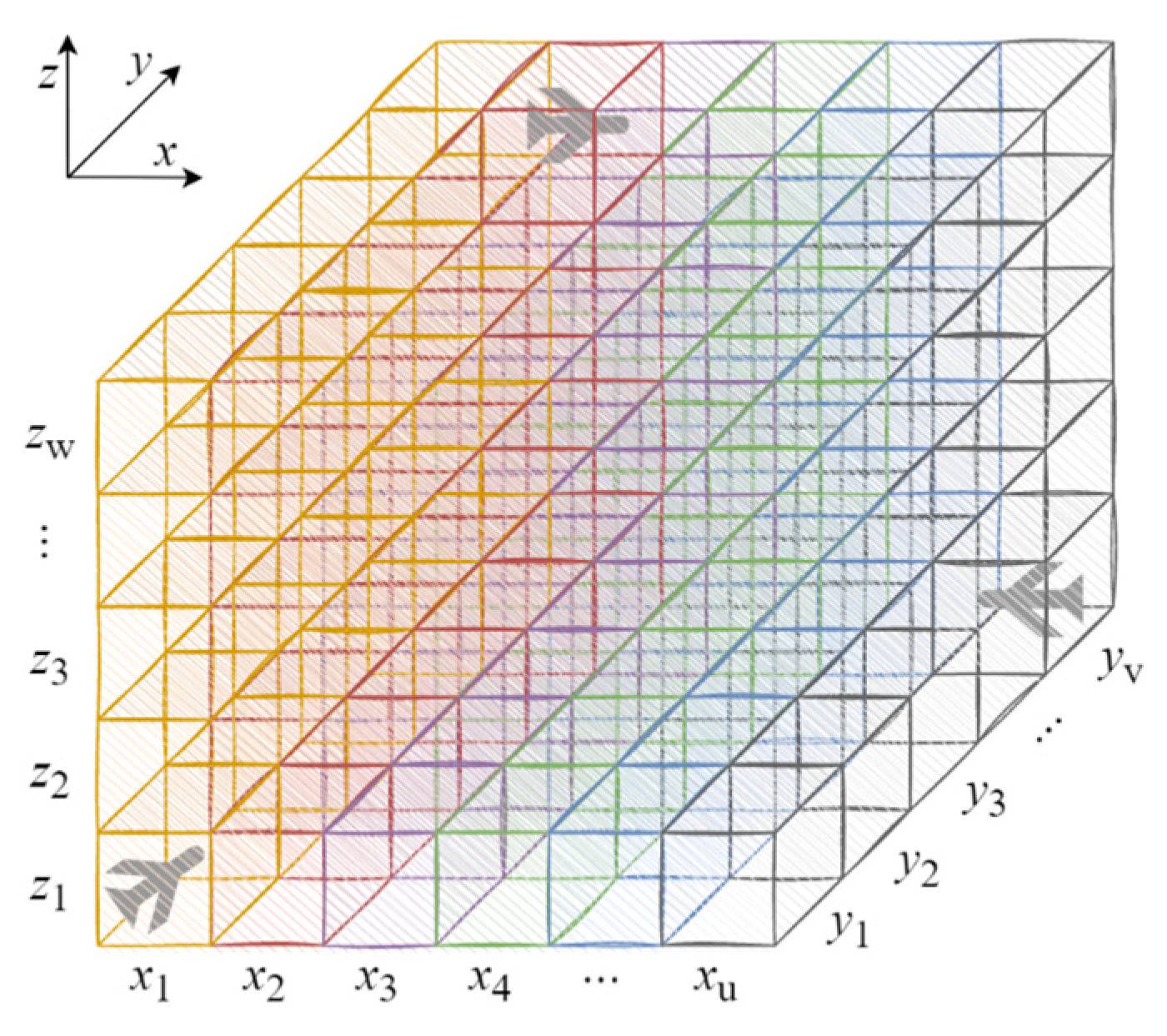
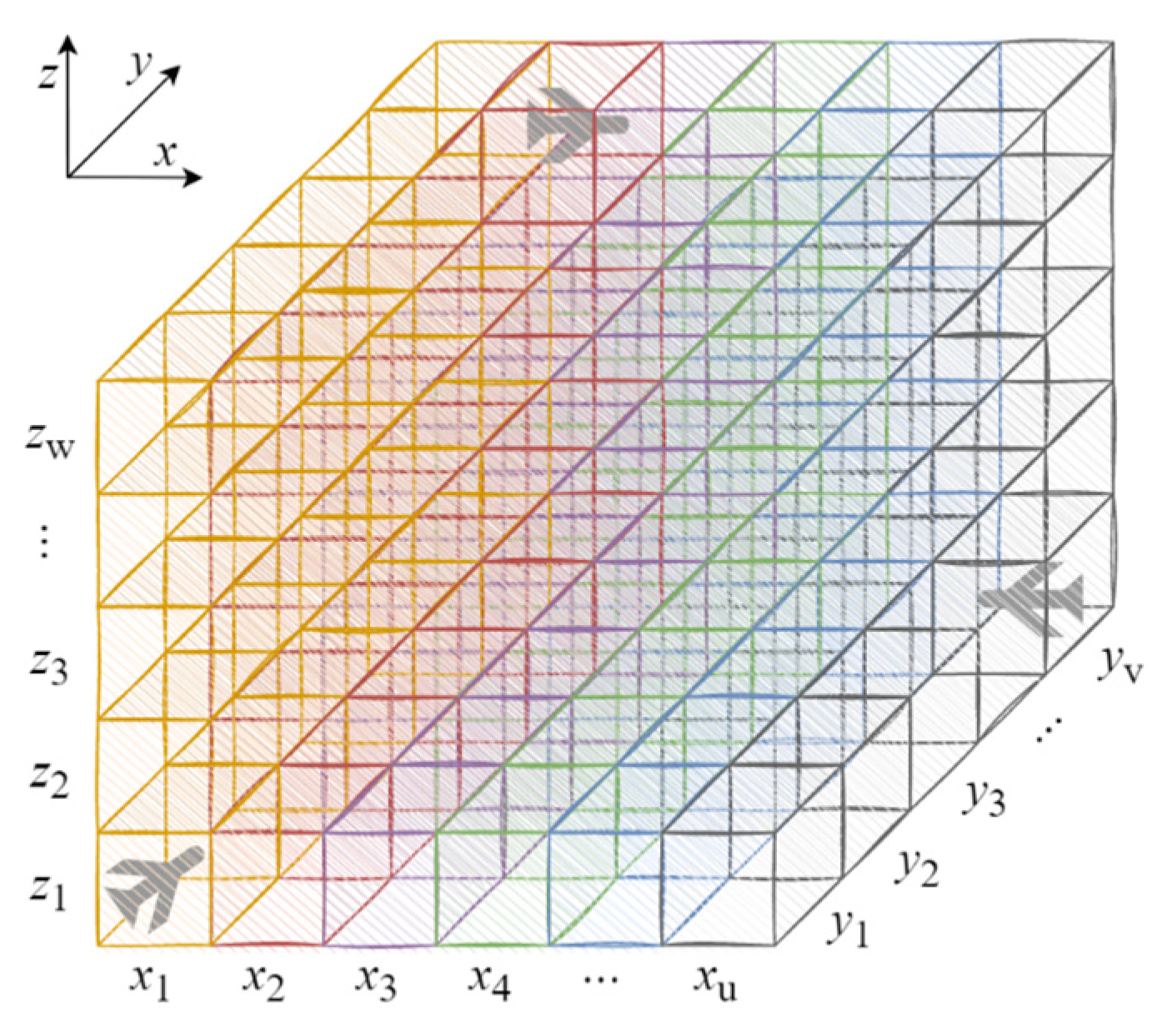
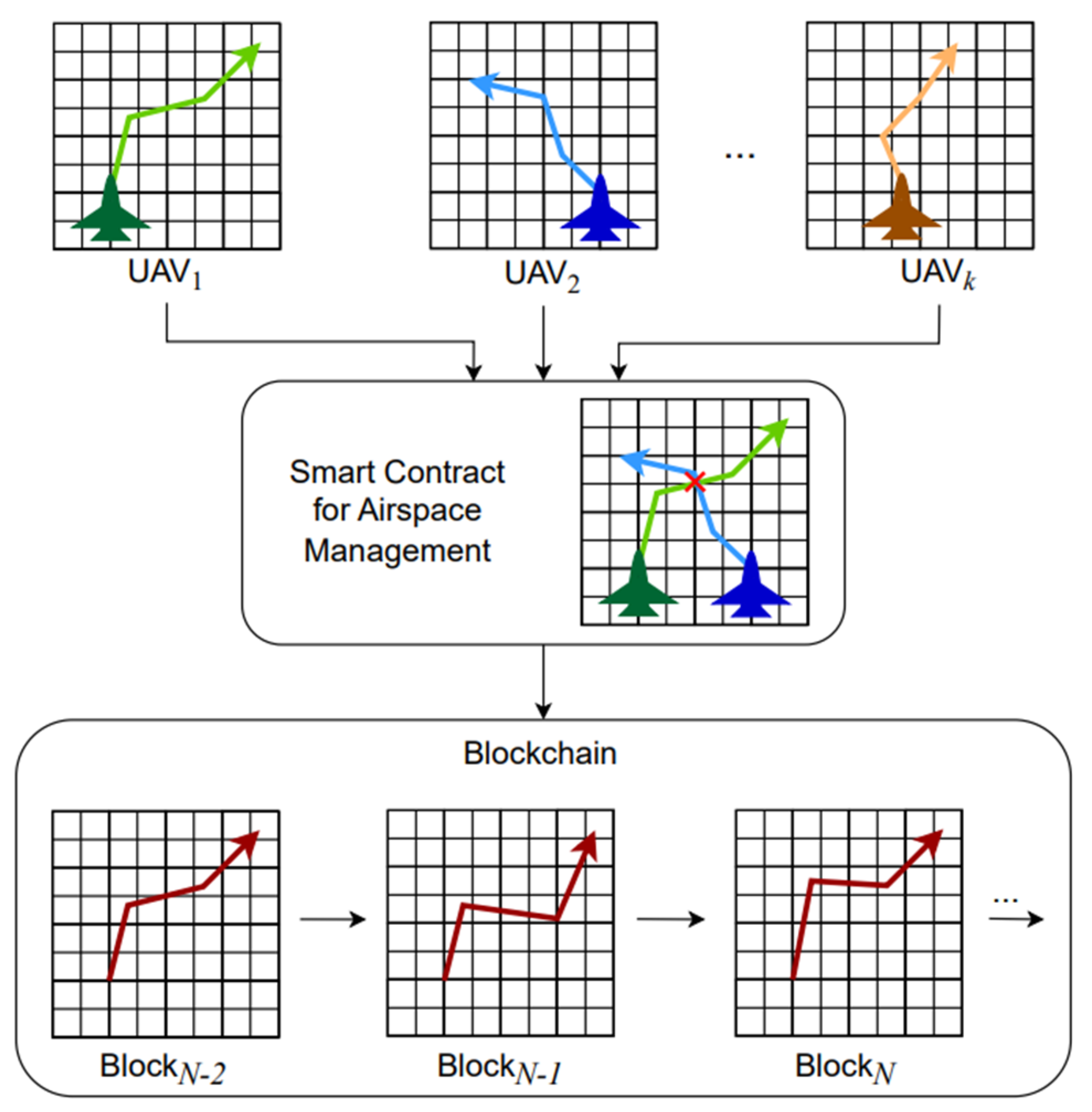
2.1. Airspace Allocation
- Find the axis with the maximum absolute coordinate value:
- Scale the point by the inverse of this value to project it onto the cube:
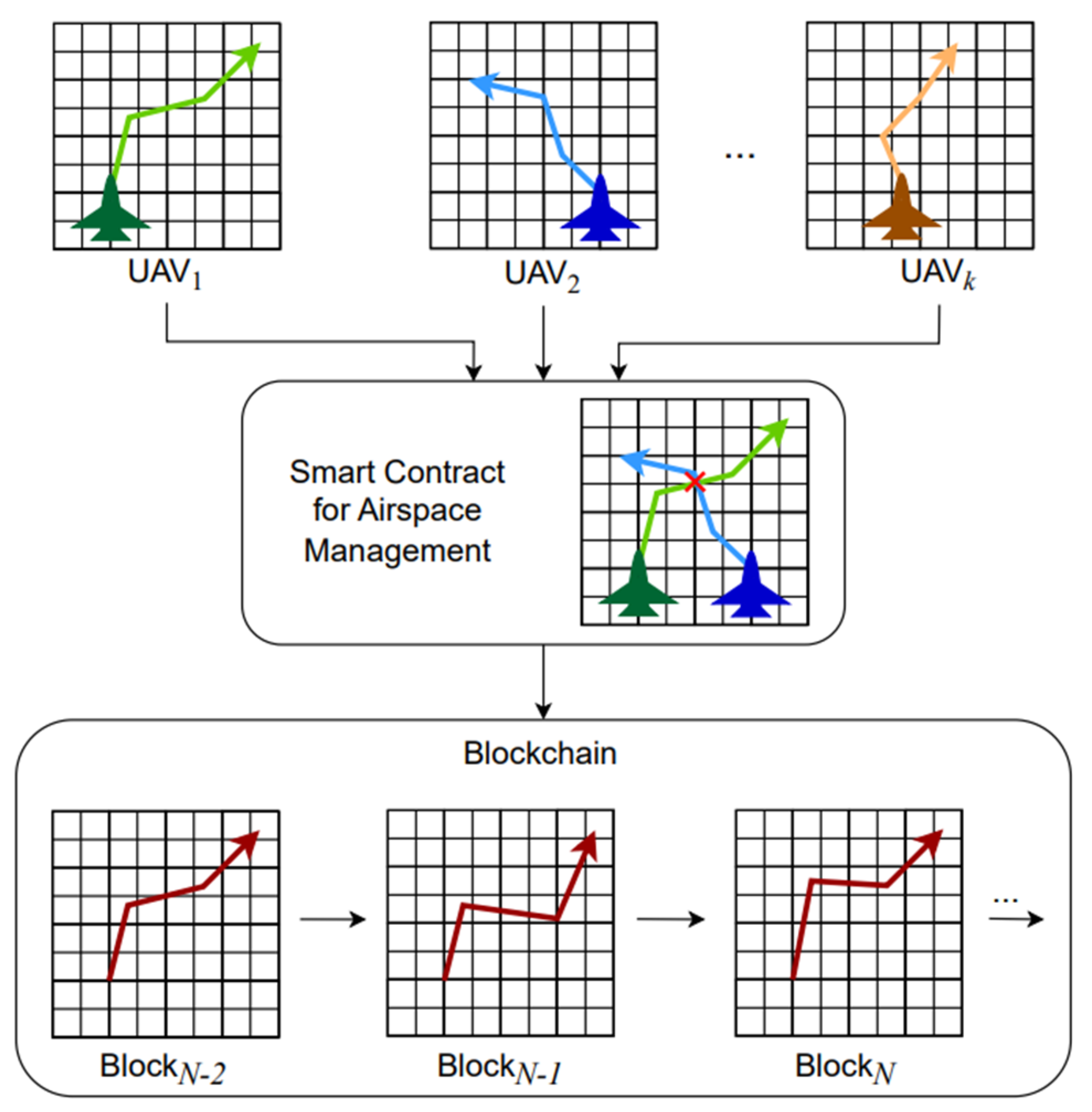
| Algorithm 1 Consensus procedure | ||||
| 1: | Input: Application for propagation of blocks to all UASs | |||
| 2: | Output: Application is accepted/refused | |||
| 3: | Confirmation process of consensus algorithm () | |||
| 4: | ||||
| 5: | ||||
| 6: | while do | |||
| 7: | Send agreement to neighbor UASs | |||
| 8: | if nodes then | |||
| 9: | execute the new block on the chain | |||
| 10: | break | |||
| 11: | else | |||
| 12: | ||||
| 13: | ||||
| 14: | end if | |||
| 15: | end while | |||
| 16: | if then | |||
| 17: | airspace rejection, and block execution is refused | |||
| 18: | end if | |||
| 19: | end process | |||
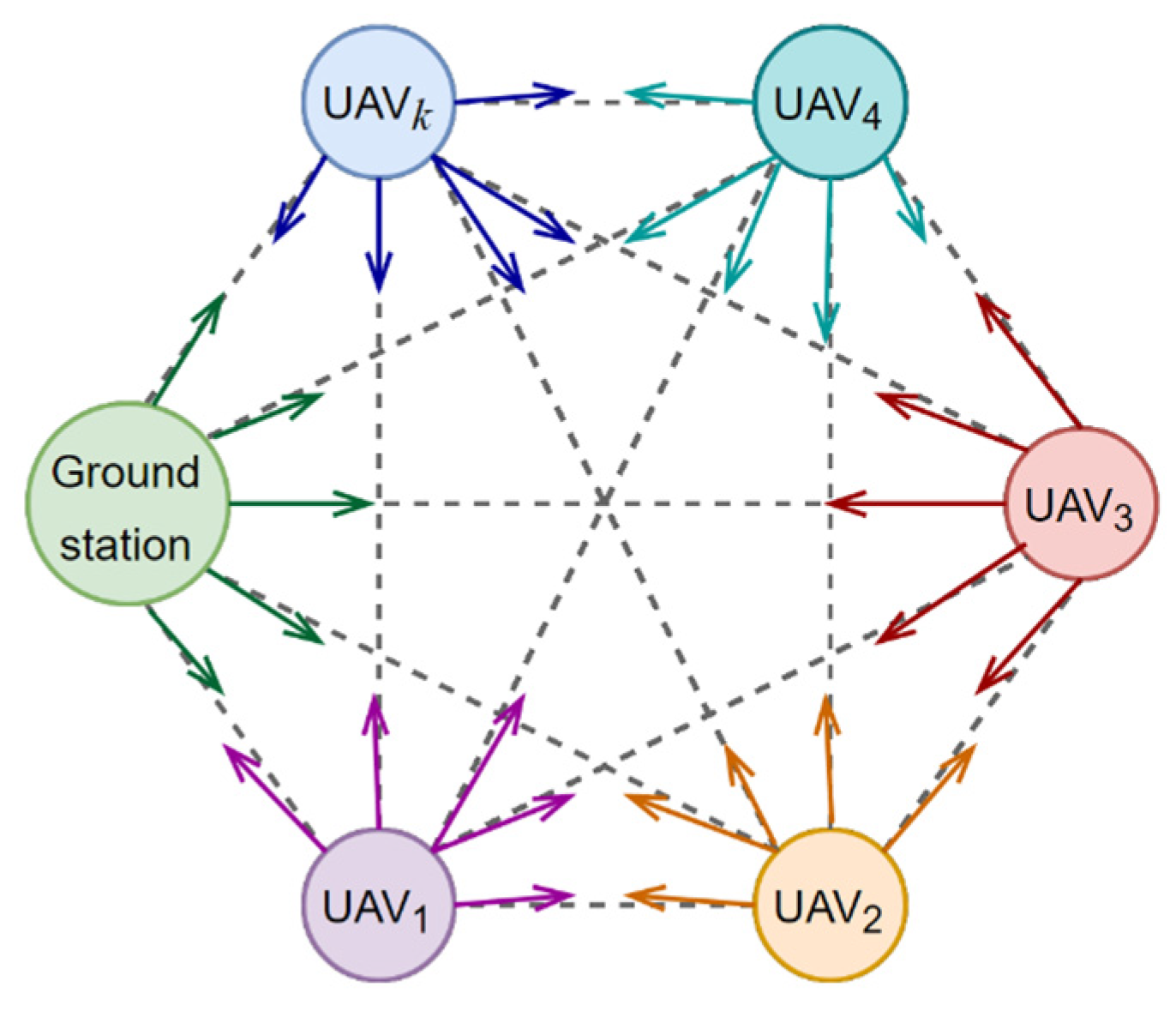
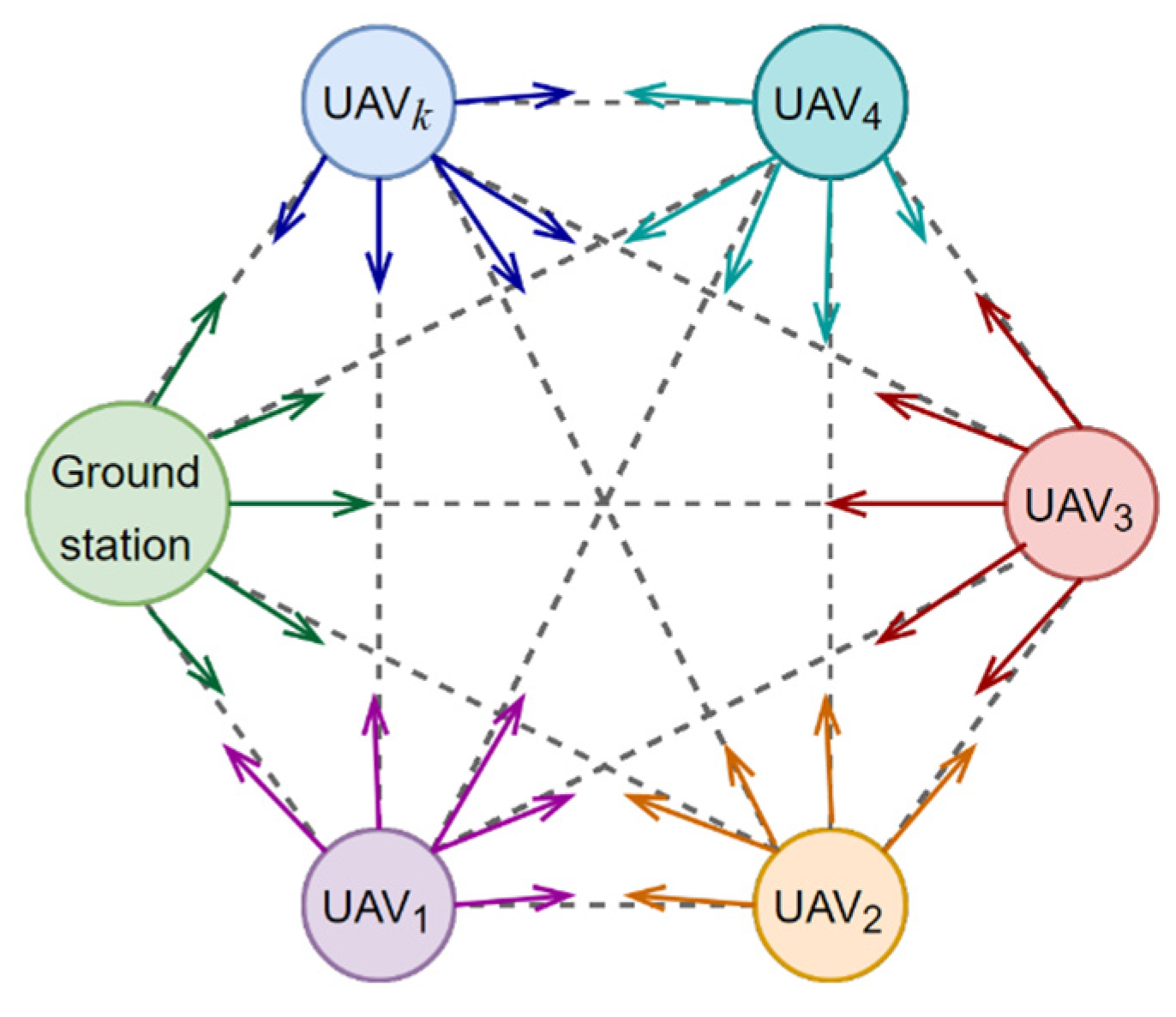
2.2. Communication for a Reliable ASM
3. Methodology
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
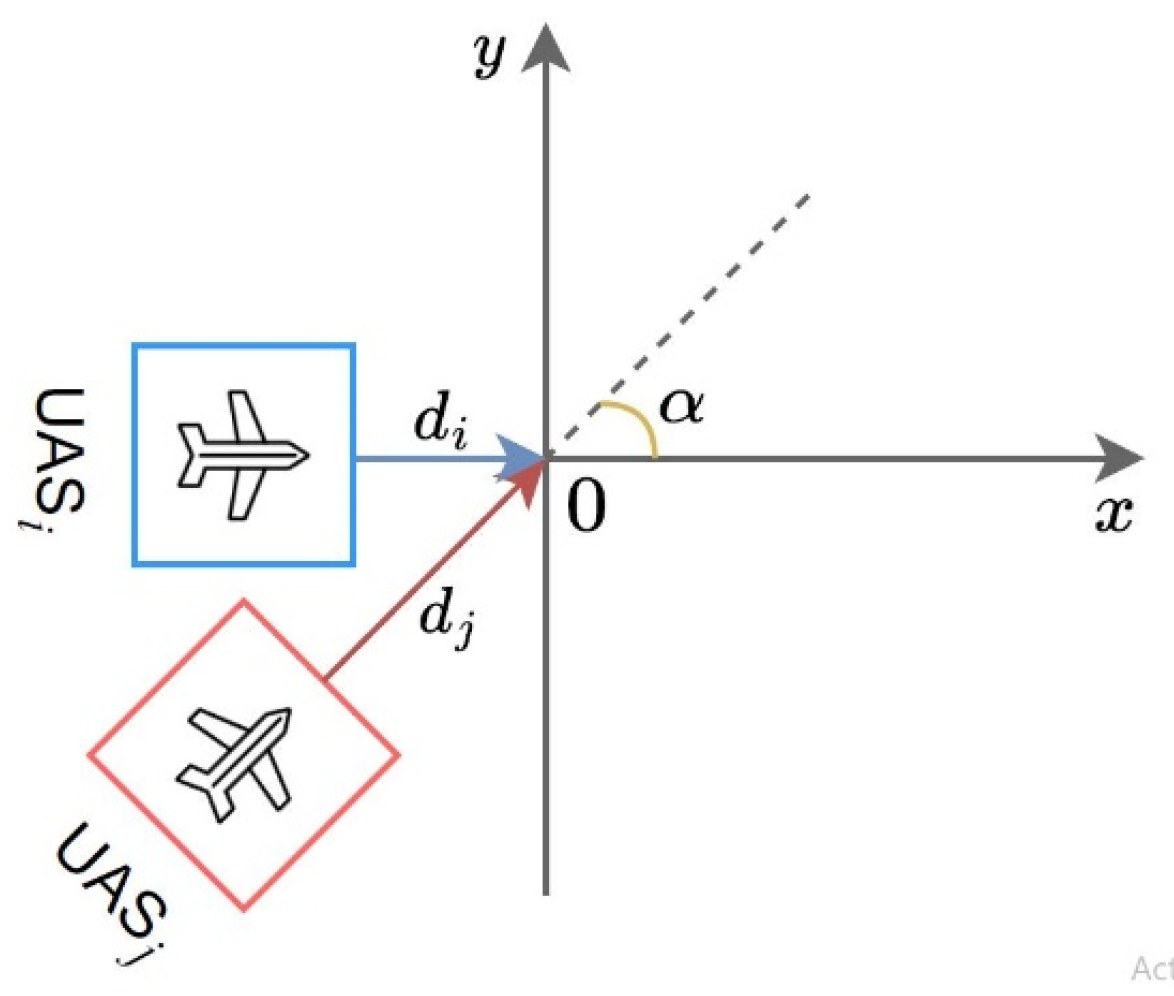
| The difference between two UAS’s heading angles | |
| Cubic airspace regarding the latitude , longitude , and altitude axes | |
| Distance to the conflict point | |
| Number of generated blocks | |
| Boundary on the maximum number of blocks generation | |
| Number of Unmanned Aerial Systems in a non-sharded flight zone | |
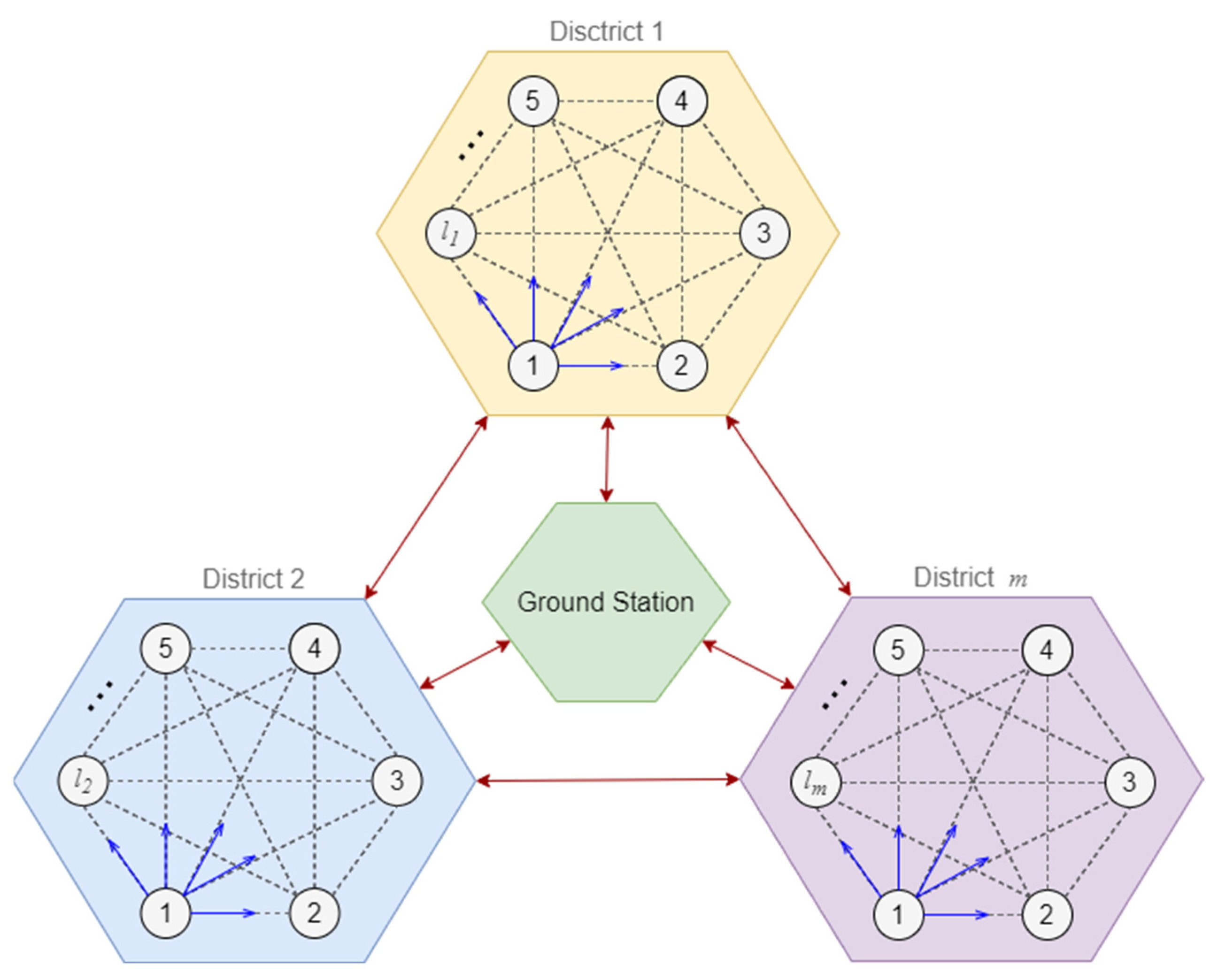
| Number of districts (shards) | |
| Number of Unmanned Aerial Systems in the district | |
| Number of Unmanned Aerial Systems in a flight zone | |
| s | Minimum allowed horizontal separation for airspace |
| End-to-end delay | |
| v | UAS’s speed when flying toward the conflict point |
| x | Latitude |
| y | Longitude |
| z | Altitude |
| ATM | Air Traffic Management |
| ASM | Airspace Management |
| GPS | Global Positioning System |
| LCP | Linear Consensus Protocol |
| PoS | Proof of Stake |
| PoW | Proof of Work |
| SDA | Swarm Dynamic Agents |
| UAS | Unmanned Aerial Systems |
| UTM | Unmanned Aerial Systems Traffic Management |
References
- Sridhar, B.; Sheth, K.S.; Grabbe, S. Airspace complexity and its application in air traffic management. In 2nd USA/Europe Air Traffic Management R&D Seminar; Federal Aviation Administration: Washington, DC, USA, 1998. [Google Scholar]
- Xiang, J.; Liu, Y.; Luo, Z. Flight safety measurements of UAVs in congested airspace. Chin. J. Aeronaut. 2016, 29, 1355–1366. [Google Scholar] [CrossRef]
- Kopardekar, P.H. Unmanned Aerial System (UAS) Traffic Management (UTM): Enabling Low-Altitude Airspace and UAS Operations; NASA: Washington, DC, USA, 2014.
- Hashemi, S.M. Novel Trajectory Prediction and Flight Dynamics Modelling and Control Based on Robust Artificial Intelligence Algorithms for the UAS-S4; École de technologie supérieure: Montréal, QC, Canada, 2022. [Google Scholar]
- Ball, M.; Donohue, G.; Hoffman, K. Auctions for the safe, efficient, and equitable allocation of airspace system resources. Comb. Auction. 2006, 1, 507–538. [Google Scholar]
- Liu, J.; Shi, Y.; Fadlullah, Z.M.; Kato, N. Space-Air-ground integrated network: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 2714–2741. [Google Scholar] [CrossRef]
- Aydoğan, E.; Cetek, C. Aircraft route optimization with simulated annealing for a mixed airspace composed of free and fixed route structures. Aircr. Eng. Aerosp. Technol. 2022, 95, 637–648. [Google Scholar] [CrossRef]
- Brust, M.R.; Danoy, G.; Bouvry, P.; Gashi, D.; Pathak, H.; Gonçalves, M.P. Defending against intrusion of malicious UAVs with networked UAV defense swarms. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks Workshops (LCN Workshops), Singapore, 9 October 2017. [Google Scholar]
- Liu, Y.; Passino, K.M. Swarm Intelligence: Literature Overview; Department of Electrical Engineering, the Ohio State University: Columbus, OH, USA, 2000. [Google Scholar]
- Izadi, H.; Gordon, B.; Zhang, Y. Safe path planning in the presence of large communication delays using tube model predictive control. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010. [Google Scholar]
- Ghommam, J.; Rahman, M.H.; Saad, M. Design of distributed event-triggered circumnavigation control of a moving target by a group of underactuated surface vessels. Eur. J. Control. 2022, 67, 100702. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Wright, S.; Zhu, Q.M. Relay manoeuvre based fixed-time synchronized tracking control for UAV transport system. Aerosp. Sci. Technol. 2020, 103, 105887. [Google Scholar] [CrossRef]
- Zhou, X.; Yu, X.; Zhang, Y.; Luo, Y.; Peng, X. Trajectory Planning and Tracking Strategy Applied to an Unmanned Ground Vehicle in the Presence of Obstacles. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1575–1589. [Google Scholar] [CrossRef]
- Bouffanais, R. Design and Control of Swarm Dynamics; Springer: Berlin/Heidelberg, Germany, 2016; Volume 1. [Google Scholar]
- Xiong, M.; Xie, G. Simple agents, smart swarms: A cooperative search algorithm for swarms of autonomous underwater vehicles. Int. J. Syst. Sci. 2022, 53, 1995–2009. [Google Scholar] [CrossRef]
- Liu, G.; Chen, L.; Liu, K.; Luo, Y. A swarm of unmanned vehicles in the shallow ocean: A survey. Neurocomputing 2023, 531, 74–86. [Google Scholar] [CrossRef]
- Wardega, K.; von Hippel, M.; Tron, R.; Nita-Rotaru, C.; Li, W. Byzantine Resilience at Swarm Scale: A Decentralized Blocklist Protocol from Inter-robot Accusations. arXiv 2023, arXiv:2301.06977. [Google Scholar]
- Bono, A.; Fedele, G.; Franze, G. A Swarm-Based Distributed Model Predictive Control Scheme for Autonomous Vehicle Formations in Uncertain Environments. IEEE Trans. Cybern. 2021, 52, 8876–8886. [Google Scholar] [CrossRef] [PubMed]
- Fiorentino, F. Path Planning Strategies for Drone Delivery for Life-Saving Pharmaceuticals; Politecnico di Torino: Torino, Italy, 2021. [Google Scholar]
- Hu, J.; Prandini, M. Aircraft conflict detection: A method for computing the probability of conflict based on Markov chain approximation. In Proceedings of the 2003 European Control Conference (ECC), Cambridge, UK, 1–4 September 2003. [Google Scholar]
- Xie, J.; Yu, F.R.; Huang, T.; Xie, R.; Liu, J.; Liu, Y. A Survey on the Scalability of Blockchain Systems. IEEE Netw. 2019, 33, 166–173. [Google Scholar] [CrossRef]
- Kenyeres, M.; Kenyeres, J. Distributed Mechanism for Detecting Average Consensus with Maximum-Degree Weights in Bipartite Regular Graphs. Mathematics 2021, 9, 3020. [Google Scholar] [CrossRef]
- Niu, Y.; Yang, T.; Hou, Y.; Cai, S.; Yan, P.; Li, W. Consensus tracking-based clock synchronization for the Internet of Things. Soft Comput. 2022, 26, 6415–6428. [Google Scholar] [CrossRef]
- Carli, R.; Fagnani, F.; Frasca, P.; Zampieri, S. Gossip consensus algorithms via quantized communication. Automatica 2010, 46, 70–80. [Google Scholar] [CrossRef]
- Zhou, X.; Yu, X.; Guo, K.; Zhou, S.; Guo, L.; Zhang, Y.; Peng, X. Safety Flight Control Design of a Quadrotor UAV With Capability Analysis. IEEE Trans. Cybern. 2021, 53, 1738–1751. [Google Scholar] [CrossRef]
- Cestino, D.; Crosasso, P.; Rapellino, M.; Cestino, E.; Frulla, G. Safety Assessment of Pharmaceutical Distribution in a Hospital Environment. J. Heal. Technol. Manag. 2013, 1, 10–21. [Google Scholar] [CrossRef]
- Lashkari, B.; Musilek, P. A Comprehensive Review of Blockchain Consensus Mechanisms. IEEE Access 2021, 9, 43620–43652. [Google Scholar] [CrossRef]
- Kwilinski, A. Implementation of blockchain technology in accounting sphere. Acad. Account. Financ. Stud. J. 2019, 23, 1–6. [Google Scholar]
- Cepeda-Gomez, R.; Olgac, N. An Exact Method for the Stability Analysis of Linear Consensus Protocols With Time Delay. IEEE Trans. Autom. Control 2011, 56, 1734–1740. [Google Scholar] [CrossRef]
- Gilbert, S.; Lynch, N. Perspectives on the CAP Theorem. Computer 2012, 45, 30–36. [Google Scholar] [CrossRef]
- Bolouki, S. Linear Consensus Algorithms: Structural Properties and Connections with Markov Chains; École Polytechnique de Montréal: Montréal, QC, Canada, 2014. [Google Scholar]
- Tsiulin, S.; Reinau, K.H.; Hilmola, O.-P.; Goryaev, N.; Karam, A. Blockchain-based applications in shipping and port management: A literature review towards defining key conceptual frameworks. Rev. Int. Bus. Strat. 2020, 30, 201–224. [Google Scholar] [CrossRef]
- van Iersel, Q.G.; Murrieta Mendoza, A.; Felix Patron, R.S.; Hashemi, S.M.; Botez, R.M. Attack and Defense on Aircraft Trajectory Prediction Algorithms. In Proceedings of the AIAA AVIATION 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022. [Google Scholar]
- Castelló Ferrer, E. The blockchain: A new framework for robotic swarm systems. In Proceedings of the Future Technologies Conference (FTC) 2018: Volume 2; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Ismail, L.; Materwala, h. A review of blockchain architecture and consensus protocols: Use cases, challenges, and solutions. Symmetry 2019, 11, 1198. [Google Scholar] [CrossRef]
- Astarita, V.; Giofrè, V.P.; Mirabelli, G.; Solina, V. A Review of Blockchain-Based Systems in Transportation. Information 2019, 11, 21. [Google Scholar] [CrossRef]
- Alladi, T.; Chamola, V.; Sahu, N.; Guizani, M. Applications of blockchain in unmanned aerial vehicles: A review. Veh. Commun. 2020, 23, 100249. [Google Scholar] [CrossRef]
- Hasin, F.; Munia, T.H.; Zumu, N.N.; Taher, K.A. Ads-b based air traffic management system using ethereum blockchain technology. In Proceedings of the 2021 International Conference on Information and Communication Technology for Sustainable Development (ICICT4SD), Dhaka, Bangladesh, 27–28 February 2021. [Google Scholar]
- Sarmah, S.S. Understanding blockchain technology. Comput. Sci. Eng. 2018, 8, 23–29. [Google Scholar]
- Mohanta, B.K.; Jena, D.; Panda, S.S.; Sobhanayak, S. Blockchain technology: A survey on applications and security privacy Challenges. Internet Things 2019, 8, 100107. [Google Scholar] [CrossRef]
- Gervais, A.; Karame, G.O.; Wüst, K.; Glykantzis, V.; Ritzdorf, H.; Capkun, S. On the security and performance of proof of work blockchains. In Proceedings of the 2016 ACM SIGSAC Conference on Computer and Communications Security, Vienna, Austria, 24–28 October 2016. [Google Scholar]
- Kiayias, A.; Russell, A.; David, B.; Oliynykov, R. Ouroboros: A provably secure proof-of-stake blockchain protocol. In Annual International Cryptology Conference; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Hashemi, S.M.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. A novel fault-tolerant air traffic management methodology using autoencoder and P2P blockchain consensus protocol. Aerospace 2023, 10, 357. [Google Scholar] [CrossRef]
- Hashemi, S.; Botez, R.M.; Ghazi, G. Comparison Study between PoW and PoS Blockchains for Unmanned Aircraft System Traffic Management. In Proceedings of the AIAA AVIATION 2023 Forum, San Diego, CA, USA, 12–16 June 2023. [Google Scholar]
- Prandini, M.; Piroddi, L.; Puechmorel, S.; Brazdilova, S.L. Toward Air Traffic Complexity Assessment in New Generation Air Traffic Management Systems. IEEE Trans. Intell. Transp. Syst. 2011, 12, 809–818. [Google Scholar] [CrossRef]
- Goodliffe, M. The new UK model for air traffic services—A public private partnership under economic regulation. J. Air Transp. Manag. 2002, 8, 13–18. [Google Scholar] [CrossRef]
- Kistan, T.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Batuwangala, E. An evolutionary outlook of air traffic flow management techniques. Prog. Aerosp. Sci. 2017, 88, 15–42. [Google Scholar] [CrossRef]
- Chen, W.; Cai, S. Ad hoc peer-to-peer network architecture for vehicle safety communications. IEEE Commun. Mag. 2005, 43, 100–107. [Google Scholar] [CrossRef]
- Wang, C.J.; Tan, S.K.; Low, K.H. Collision risk management for non-cooperative UAS traffic in airport-restricted airspace with alert zones based on probabilistic conflict map. Transp. Res. Part C Emerg. Technol. 2019, 109, 19–39. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Salles, M.A.V.; Zhang, Z.; Li, T.; Hu, B.; Henglein, F.; Lu, R. Building blocks of sharding blockchain systems: Concepts, approaches, and open problems. Comput. Sci. Rev. 2022, 46, 100513. [Google Scholar] [CrossRef]
- de Oliveira, I.R.; Matsumoto, T.; Neto, E. Blockchain-based traffic management for Advanced Air Mobility. arXiv 2022, arXiv:2208.09312. [Google Scholar]
- Kushwaha, S.S.; Joshi, S.; Singh, D.; Kaur, M.; Lee, H.-N. Systematic Review of Security Vulnerabilities in Ethereum Blockchain Smart Contract. IEEE Access 2022, 10, 6605–6621. [Google Scholar] [CrossRef]
- Cao, B.; Zhang, Z.; Feng, D.; Zhang, S.; Zhang, L.; Peng, M.; Li, Y. Performance analysis and comparison of PoW, PoS and DAG based blockchains. Digit. Commun. Netw. 2020, 6, 480–485. [Google Scholar] [CrossRef]
- Ghommam, J.; Saad, M.; Mnif, F.; Zhu, Q.M. Guaranteed Performance Design for Formation Tracking and Collision Avoidance of Multiple USVs With Disturbances and Unmodeled Dynamics. IEEE Syst. J. 2020, 15, 4346–4357. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M.; Grigorie, T.L. New Reliability Studies of Data-Driven Aircraft Trajectory Prediction. Aerospace 2020, 7, 145. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Hashemi, S.A.; Botez, R.M.; Ghazi, G. Aircraft Trajectory Prediction Enhanced through Resilient Generative Adversarial Networks Secured by Blockchain: Application to UAS-S4 Ehécatl. Appl. Sci. 2023, 13, 9503. [Google Scholar] [CrossRef]
- Hashemi, S.M.; Botez, R.M. A Novel Flight Dynamics Modeling Using Robust Support Vector Regression against Adversarial Attacks. SAE Int. J. Aerosp. 2023, 16. [Google Scholar] [CrossRef]
- Hashemi, S.; Botez, R. Lyapunov-based Robust Adaptive Configuration of the UAS-S4 Flight Dynamics Fuzzy Controller. Aeronaut. J. 2022, 126, 1187–1209. [Google Scholar] [CrossRef]
- Bashllari, A.; Kaciroti, N.; Nace, D.; Fundo, A. Conflict Probability Estimations Based on Geometrical and Bayesian Approaches. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Bellevue, WA, USA, 30 September–3 October 2007. [Google Scholar]
- Aiyar, K.; Halgamuge, M.N.; Mohammad, A. Probability distribution model to analyze the trade-off between scalability and security of sharding-based blockchain networks. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2021. [Google Scholar]
- Borran, F.; Schiper, A. A leader-free byzantine consensus algorithm. In International Conference on Distributed Computing and Networking; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Wing area | 2.3 m2 |
| Wingspan | 4.2 m |
| Mean aerodynamic chord | 0.57 m |
| Total length | 2.5 m |
| Maximum take-off weight | 80 kg |
| Empty weight | 50 kg |
| Loitering airspeed | 35 knots |
| Maximum speed | 135 knots |
| Operational range | 120 km |
| Service ceiling | 15,000 ft |
| Consensus Mechanism | Number of UAS | Number of Shards | ) | Error Rate % |
|---|---|---|---|---|
| Proof of Work (PoW) | 100 | 4 | 21 | 7.7 |
| 16 | 18 | 7.2 | ||
| 1000 | 4 | 420 | 9.3 | |
| 16 | 365 | 8.8 | ||
| Proof of Stake (PoS) | 100 | 4 | 11 | 13.1 |
| 16 | 8 | 12.6 | ||
| 1000 | 4 | 121 | 17.6 | |
| 16 | 101 | 16.9 |
| Error Rates % | ||||
|---|---|---|---|---|
| Number of UASs | Leader-Free | Leader-Based | ||
| PoW | PoS | PoW | PoS | |
| 10 | 0.21 | 0.43 | 0.32 | 0.67 |
| 100 | 0.47 | 0.88 | 0.65 | 1.31 |
| 1000 | 0.96 | 1.75 | 1.34 | 2.71 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashemi, S.M.; Botez, R.M.; Ghazi, G. Blockchain PoS and PoW Consensus Algorithms for Airspace Management Application to the UAS-S4 Ehécatl. Algorithms 2023, 16, 472. https://doi.org/10.3390/a16100472
Hashemi SM, Botez RM, Ghazi G. Blockchain PoS and PoW Consensus Algorithms for Airspace Management Application to the UAS-S4 Ehécatl. Algorithms. 2023; 16(10):472. https://doi.org/10.3390/a16100472
Chicago/Turabian StyleHashemi, Seyed Mohammad, Ruxandra Mihaela Botez, and Georges Ghazi. 2023. "Blockchain PoS and PoW Consensus Algorithms for Airspace Management Application to the UAS-S4 Ehécatl" Algorithms 16, no. 10: 472. https://doi.org/10.3390/a16100472
APA StyleHashemi, S. M., Botez, R. M., & Ghazi, G. (2023). Blockchain PoS and PoW Consensus Algorithms for Airspace Management Application to the UAS-S4 Ehécatl. Algorithms, 16(10), 472. https://doi.org/10.3390/a16100472