1. Introduction
The zero-input response, sometimes also referred to as the natural response, is a well-known concept in system theory. It is the response of a system to its initial conditions, represented by the vector of the initial state in the absence of external excitation. The second well-known component of a system motion is its zero-state response, or forced response, which is the response of the system to external excitation under zero initial conditions. For linear systems, as a consequence of the superposition principle, the total response of the system, i.e., its response to external excitation under general initial conditions, is the sum of the zero-input and zero-state response [
1].
The natural response plays a specific role in describing phenomena in systems left “to themselves”. From the way these systems deal with their own initial conditions and how the corresponding movement of the system can be observed through the chosen outputs, one can infer the stability of the system and the observability of the corresponding state variables from these outputs. The zero-state response, in turn, indicates the way in which signals from given inputs are propagated to given outputs through the state dynamics.
Furthermore, it is well known that the natural response of a linear system can be composed of a linear combination of so-called basis functions [
2]. If a linear differential system with lumped parameters is considered, then the corresponding basis functions are components of the general solution of the corresponding input–output homogeneous differential equation of the system. The same basis functions appear in the general solution of the set of state equations of the system at zero excitation. The basis functions of a particular system are uniquely determined by the system poles, i.e., by the roots of its corresponding characteristic equation or the eigenvalues of the state matrix.
For classical integer-order systems (IOSs), the possible basis functions are functions of the form
eat, sin(
bt), cos(
bt) and their combinations
eat sin(
bt),
eat cos(
bt), which are further multiplied by the functions
tk,
k = 0, 1, ...,
m − 1,
m ∈ N,
a ∈ R,
b ∈ R+ in the case of
m-tuple poles. All these basis functions can be expressed by the real and imaginary components of the exponential function of the complex argument, which will be hereinafter referred to as the generating basis function
f ∈ C:
The above basis functions play an important role in the concept of
modes of motion of a linear system [
3], which is known from classical mechanics [
4]. The linear combination of the basis functions can be used to model not only the natural response, but also selected types of forced responses, which include the impulse responses of so-called proper systems, i.e., systems of an integer order whose transfer functions have a polynomial of a lower order in the numerator than in the denominator. In the opposite case of improper systems, the impulse response contains, in addition to the basis functions mentioned above, the Dirac impulses and their derivatives, which penetrate the output due to the Dirac impulse exciting the system input.
The concept of basis functions can be extended to the class of linear fractional-order systems (FOSs). It is well known that the Mittag–Leffler functions (MLFs) with one, two or three parameters play an important role in the description of these systems, and can thus be viewed as a generalization of the classical exponential function from the domain of IOS [
5]. It can be therefore expected that basis functions from the world of FOS are a generalization of the above basis functions and thus they could be derived from some known kinds of the MLFs. On the other hand, the MLFs are not the only possible candidates: for example, several different definitions of exponential and goniometric functions generalized to the fractional domain are known [
6,
7,
8,
9,
10,
11]. Dictionaries of the Laplace transform for a fractional domain include functions such as Dawson, erc, ercf, Bessel, extended Bessel, hypergeometric, Hermite polynomials [
12] or, for example, the function introduced by Podlubny in [
13] for solving fractional differential equations. It is necessary to consider which of these or similar functions are appropriate to be selected for the set of basis functions. Furthermore, one should analyze the modification of these functions for the case of multiple poles and try to find an equivalent to the above function
tk for FOS. The notional culmination of this work should be to find a generating basis function from which all basis functions for the fractional domain can be generated, i.e., an analogue of function (1) for the integer-order domain.
The concept of basis functions can be used to algorithmically generate equations of waveforms of system responses via an analysis program. For example, formulas of responses to initial conditions or impulse or step responses as functions of time can be generated. The Laplace transform of the response, for example, the transfer function as the Laplace transform of the impulse response, is decomposed into partial fractions. A basis function of time is assigned to each fraction. The impulse response is then expressed as a linear combination of the basis functions. Once the basis functions are quantified, the waveform of the corresponding response is directly obtained with an algebraic evaluation, not with a classical numerical solution of differential equations. The accuracy of the result is determined with the accuracy of the pole calculation, the accuracy of the algorithm of partial fraction decomposition and the accuracy in computing the basis functions. This procedure also has the advantage of offering insight into the dynamics of the system through the analytical formula of the response. Simulation programs for a so-called symbolic and semi-symbolic circuit analysis work on this principle [
14].
As far as numerical methods for calculating the standard responses of linear systems are concerned, particularly the impulse or step responses, either standard simulation programs such as SPICE or another platform for scientific and technical calculations such as MATLAB can be used. Of course, programs like MATLAB also allow an analysis using various numerical algorithms that are not available in classical simulation programs [
15,
16]. A review of numerical methods for solving linear fractional differential equations and a discussion of specific problems associated with them are given in [
17]. Additional procedures are published in [
15] together with codes for implementation in MATLAB. The method based on closed-form solutions to linear fractional-order differential equations starts from the approximate Grünwald–Letnikov definition of the fractional-order derivative. However, the accuracy of the transient analysis strongly depends on the choice of the computational step, so the method is of little use when solving practical problems. In [
18], a generalization of the classical integer-order integrator approach for the numerical solution of the free (zero-input) response is made by elaborating the concept of the fractional integrator. In [
19], the concept of LFD (Local Fractional Derivative) is used to compute zero-input responses.
Numerical algorithms of the Laplace inversion can also be used for a transient analysis [
20,
21]. An excellent discussion of the selected algorithms is given in [
22,
23].
Procedures utilizing analytical preprocessing of results are also popular. The analytical solution of a linear homogeneous fractional-order differential equation was first published in the classic work [
13]. However, the corresponding formula contains infinite sums of derivatives of two-parameter MLFs, and is thus of little use for practical calculations.
Interesting possibilities of a transient analysis are offered for the so-called commensurate systems, where all non-integer powers of the operator
s in their transfer functions are rational numbers. For commensurate systems, one can use a procedure leading to expressing their impulse or step responses in terms of a finite sum of MLFs [
15,
24,
25].
The algorithmic generation of waveform formulas, constructed from basis functions, is an interesting alternative to the above numerical methods because it completely eliminates the numerical solution of differential equations of a non-integer order.
The above summary of the state of the art indicates the usefulness of extending the concept of basis functions to the domain of linear fractional-order systems. In the following section, the problem to be solved is specified, and new pieces of knowledge arising from its solution as well as their application potential are pointed out.
2. Problem Formulation
The purpose of this article is to solve the following problem:
Consider a linear time-invariant IOS, described with a proper
s plane transfer function
where
ai,
bi ∈ R,
an ≠ 0,
m,
n ∈ N+ and
m <
n.
Let us define an associated commensurate FOS with the transfer function
KF, obtained from transfer function (2) by substituting
thus
Denote the impulse responses of systems (2) and (4), i.e., the Laplace inverse of (2) and (4), as g(t) and gF(t), respectively.
Let us solve the following problem:
Suppose we know the analytic formula for g(t) as a linear combination of the basis functions of time. Let us find a procedure for deriving gF(t) from g(t) for all possible configurations of the coefficients ai, bi from (2) and (4), respectively.
It will be shown below that gF(t) can be obtained from g(t) such that to each known basis function of the IOS, the corresponding basis function of the FOS will be assigned. This result can be arrived at in the following steps: transfer function (1) will be decomposed into partial fractions, and each fraction will be converted into a basis function of time according to whether the corresponding pole is real or complex and simple or multiple. In the next step, substitution (2) will be applied to the formula of partial fraction decomposition, and the Laplace inversion will be used to arrive at the basis functions of associated system (3). By comparing the results from the two steps, we come to unambiguous correspondences between the basis functions in the integer-order and fractional-order domains.
The above procedure leads to the main contribution of this paper, which is the definition of a complete set of basis functions of commensurate FOS with transfer function (4). These functions allow an analytical description of the natural responses of all the above FOSs for an arbitrary set of their eigenvalues. This automatically implies the possible use of this analytical modeling for an accurate transient analysis of FOS without the need for a numerical solution of fractional-order differential equations, while the accuracy is guaranteed for both stable and unstable systems.
Another possible use arises from revealing the above correspondence between the basis functions of the FOS and the IOS: it can be used for an effective computer-aided transient analysis of commensurate FOSs with a direct utilization of the well-known algorithms for finding analytic formulas of responses of IOSs, with the proviso that in the final stage, the classical basis functions are replaced by new basis functions of associated FOS (3). In this paper, we will point out another interesting use of the formulas of impulse responses of FOS constructed from basis functions: reflecting them back into the space of IOSs, one can arrive at hitherto unpublished or little-known correspondences between the Laplace transforms and their time-domain representations from the world of classical IOS.
This paper is structured as follows: in
Section 3, following this section, the mathematical prerequisites for constructing the basis functions are summarized. In
Section 4 and
Section 5, the Laplace inversions of the transfer function of a commensurate proper FOS for real and complex, single and multiple poles are performed with the aim of expressing the corresponding basis functions in a unified way.
Section 6 proposes the formalism for writing these functions and the function generating all the proposed basis functions, together with an unambiguous correspondence between the basis functions for IOS and FOS.
Section 7 discusses the possibility of algorithmically expressing the analytical formulas for the step response from the knowledge of the formula of the impulse response composed of the basis functions.
Section 8 discusses the numerical aspects of calculating the impulse and step responses with the method of generating their formulas from the transfer function. In
Section 9, the procedures are demonstrated on examples.
4. Time-Domain Response via Basis Functions: Real s1-Domain Poles
For the case of an
m-tuple real pole
s =
a of the transfer function of an IOS, the corresponding partial fractions of decomposition (2) are of the familiar form
where
Pk are the residues belonging to the root
a.
The partial fractions of the decomposition of associated transfer function (4) of a commensurate FOS have the same form as (41), differing only in substitution (2), so they can be written as follows:
From the well-known formula
published in various notations in a number of works, e.g., [
13], the relations can be derived between the time and Laplace domains, relevant to partial fractions (41) and (42), for single and multiple real poles, as shown in
Table 2.
From a comparison of the relations in
Table 2, analogies begin to emerge between the basis functions for IOS and FOS. For a simple pole, the classical exponential function of an IOS corresponds to a MLF of type
Eα,α multiplied by a factor
tα−1. However, this is a generalized exponential function (26). For the multiple pole, the classical exponential function is accompanied by a multiplicative term
tk−1. In the fractional domain, this is reflected both by the derivative of the function
Eα,α of order (
k − 1) and by the multiplicative term
tα(k−1). It is easy to see that the resulting waveform can then be smartly expressed by function (28) of type
εk−1. A more detailed analysis will be carried out in
Section 6.
6. Basis Functions for Integer- and Fractional-Order Commensurate Systems: One-to-One Correspondence
Starting from the possible forms of the decomposition of the transfer function into partial fractions for real and complex poles (41), (42), (46), and comparing the formulas of the corresponding waveforms for the IOS and FOS in
Table 2,
Table 3 and
Table 4, we arrive at the summary of basis functions given in
Table 5 in the “Basis Functions” columns. There are specific connections between these functions. These connections, which are different for single and multiple poles, are best seen by comparing the contents of the “Generated from” columns, which reveal from which general “generating function” these basis functions are generated.
Let us first compare the part of
Table 5 for integer-order systems with the “Basis Functions” column for fractional-order systems.
If we restrict ourselves to simple poles, then the basis function eat of the IOS, i.e., the classical exponential function, corresponds to the basis function of FOS, i.e., fractional exponential function (26). Undamped functions of the sine and cosine type are projected into the fractional domain as fractional sine and cosine functions of type (36) and (35).
Note that all of these above basis functions of FOS can be expressed using a two-parameter MLF of type Eα,α.
For multiple poles, the basis functions of IOS are given by the product of the integer power of time, tk, and the classical exponential function or its imaginary or real part. For FOS, they are the products of the non-integer powers of time tαk, the non-integer powers of time tα−1 and the k-th derivatives of the function Eα,α or its imaginary or real part. For the purely imaginary poles, the k-th derivatives of the functions sinα,α and cosα,α multiplied by the terms tα−1 correspond to the classical sine and cosine functions for IOS.
Note that all these basis functions of FOS for multiple poles can be expressed using the corresponding derivatives of the two-parameter MLF of type Eα,α.
Based on defining relation (28) for Podlubny’s function εk, it is easy to prove that all basis functions for the FOS, listed in the “Basis Functions” column, can be expressed just using the function εk as listed in the “Generated from” column.
Thus,
Table 5 provides guidance on how to obtain the time response of a commensurate FOS from the response of the associated classical IOS, namely by substituting for each other the appropriate basis functions. The most systematic correspondence is provided by comparing the generating functions
f(
t) for IOS (1) and
fF(t) for FOS,
(see the comparison of the “Generated from” columns in
Table 5): for real poles of a general multiplicity, the basis functions are generated with the function
tk eat or
εk(t,
a;
α,
α), and for complex poles of a general multiplicity, by the real and imaginary parts of the function
tk e(a+ib)t or
εk(
t,
a + i
b;
α,
α).
7. Calculation of Step Response
The correspondence between the basis functions of the IOS and FOS from
Table 5 allows a convenient determination of analytical formulas for the impulse response
gF(t) of commensurate FOS from the known impulse response
g(
t) of IOS. Let us reiterate that transfer functions (2) and (4) of both systems are bounded by relation (3).
Let us analyze to what extent the correspondences of
Table 5 can be used to determine the step response
hF(t) of the FOS. Since the step response is the forced response to a unit step, the question is whether it can be constructed from the basis functions from
Table 5, which describe natural, not forced, responses.
It turns out that in the general case, we really cannot make do with the above basis functions when constructing the step response.
The step response
hF(t) of the associated commensurate FOS of transfer function
KF(sα) (4) is obtained with the Laplace inversion of the function
KF(sα)
/s = K(
sα)
/s. Similarly, the step response
h(
t) of the IOS is the Laplace inverse of the expression
K(
s)
/s:
Since the denominator of the second equation contains the
s operator, not its power
sα, the assumption from
Section 1 that the Laplace transform of the time response of a FOS is obtained from the Laplace transform of IOS with substitution (2) cannot be used. However, all the conclusions that follow from this assumption, including the transformation relations of
Table 5, are based on this assumption.
On the other hand, the step response can be easily obtained with a direct integration of the impulse response with respect to time. Since the impulse response of proper systems can be thought of as a linear combination of basis functions, the step response is actually constructed from a linear combination of the integrals of the basis functions with respect to time. Using the rule of integration of Podlubny’s function (28) [
13], the first integral of generating function
fF (t) (52) can be written as follows:
Thus, it is obvious that the step response can be composed from the basis functions that are built of MLFs with the parameters
α,
α + 1. Starting from transfer function (4), it is possible to first determine the impulse response based on
Table 5 and then proceed to the step response by integrating each basis function according to (54).
8. Numerical Aspects
Reliable algorithms for computing the basis functions are necessary for an accurate and fast computation of waveforms from their semi-symbolic formulas that use these functions.
Table 5 shows that all the basis functions for FOS can be uniformly generated with Podlubny’s function (28)
εk(
t,
a + i
b;
α,
α). In terms of numerical computations, it is a complex function of three real and one complex argument. Relation (28) defining this function contains the
k-th derivative of the complex two-parameter MLF of the complex argument. The evaluation of this function can be approached either directly, i.e., with an algorithm for computing the derivatives of the two-parameter MLF, or indirectly by computing the three-parameter MLF, from which the derivatives of the two-parameter MLF can then be easily determined (see
Table 1).
A number of papers deal with the numerical calculation of MLF. Some of them have become the basis for developing robust algorithms for evaluating two- and three-parameter MLFs [
30,
31]. Among the best known is the MATLAB function mlf.m of Podlubny and Kacenak [
27], which computes the two-parameter MLF with a complex argument. However, since it is not designed to compute derivatives of MLFs, it cannot be used to compute the basis functions belonging to multiple poles. Garrappa’s ml.m function is available on the MATLAB Central File Exchange, allowing for computing one-parameter, two-parameter and three-parameter MLFs [
29]. Thus, the ml.m function allows for computing the derivative of the two-parameter MLF indirectly, using three-parameter MLFs. The corresponding routine, which implements the optimal parabolic contour (OPC) algorithm described in [
33], is based on the inversion of the Laplace transform on a parabolic contour suitably chosen in one of the regions of analyticity of the Laplace transform [
29]. However, there are some limitations in computing three-parameter MLFs via the ml.m: the parameter
α must be greater than 0 and less than 1, and the absolute value of the complex argument of the MLF must not be less than
απ radians. In particular, the second condition can pose a significant limitation for computing derivatives of the two-parameter MLF as part of Podlubny’s generating function.
To evaluate two-parameter MLFs and their derivatives, it is convenient to use another MATLAB function, ml_deriv(
α,
β,
k,
z) by R. Garrappa. The function computes the
k-th derivative of the MLF with the parameters
α and
β at each entry of the complex vector
z. Derivatives of the ML function are evaluated by exploiting an algorithm combining (by means of the derivative balancing technique devised in [
31]) the Taylor series, a summation formula based on the Prabhakar function and the numerical inversion of the Laplace transform obtained after generalizing the algorithm described in [
33]. The function was successfully tested in [
25] for the accuracy of computing the derivatives. Based on the results published in [
25], the given algorithm was used to evaluate the basis functions of
Table 5, which belong to all kinds of poles, real or complex, simple or with a general multiplicity. The algorithm from ml_deriv is also continuously implemented in the current versions of SNAP for symbolic, semi-symbolic and numerical analyses of analog fractional-order circuits [
14].
9. Illustration of the Use of Basis Functions for Transient Analysis
The use of basis functions for a transient analysis is illustrated by two examples. In the first step, the formulas for impulse and step responses are always found. In the second step, these responses are quantified. The MATLAB script ml_deriv by R. Garrappa [
25] was used to evaluate the basis functions.
The responses obtained with this procedure were also simulated in the following SPICE-family simulation programs: Cadence PSPICE 16.5, LTSpice XVII and Micro-Cap 12. The fractional-order transfer functions were modeled using Laplace sources. In case of inconsistent results, data from MATLAB were imported into the simulation program for comparison. The decision on which results were correct was made via the so-called FFT-check, i.e., by using the Fourier transform of the impulse responses and by comparing the results with the frequency characteristics derived from the transfer functions.
Significantly different outputs of SPICE-family programs when solving the same task were observed for all the simulations described below. It turned out that, in all cases, the correct results were generated only in MATLAB via the basis functions method. As far as SPICE-family programs are concerned, the most accurate analysis was achieved with Micro-Cap 12. For this reason, the Micro-Cap outputs were chosen for the MATLAB-SPICE comparison.
9.1. Minimum-Phase Fractional-Order System
A commensurate minimum-phase system is analyzed in [
34], with the transfer function
where
For system (55), let us find the basis functions of its natural response and use them to construct the formulas for the impulse and step responses.
First, the basis functions and the impulse response of the associated IOS will be found. Substituting
α = 1 into (55) yields the transfer function
K(
s) (see Equation (2)). The decomposition of
K(
s) into partial fractions and the Laplace inversion lead to the impulse response
Equation (56) implies that the transfer function
K(
s) has six real poles
ak,
k = 1... 6, and two pairs of complex conjugate poles of type
ck =
ak ± i
bk. The corresponding residues are denoted by the symbols
Pk =
Pkr + i
Pki. The poles and residues were calculated with a high precision using the MATLAB symbolic toolbox, and, after rounding, they are summarized in
Table 6.
A similar decomposition of the function K(s)/s can be used to obtain the formula for the step response.
Based on (56) and
Table 6, the formula of the impulse response of the associated commensurate system with transfer function
KF (s) (55) can be directly written as
The step response is easily determined from (57) using (54):
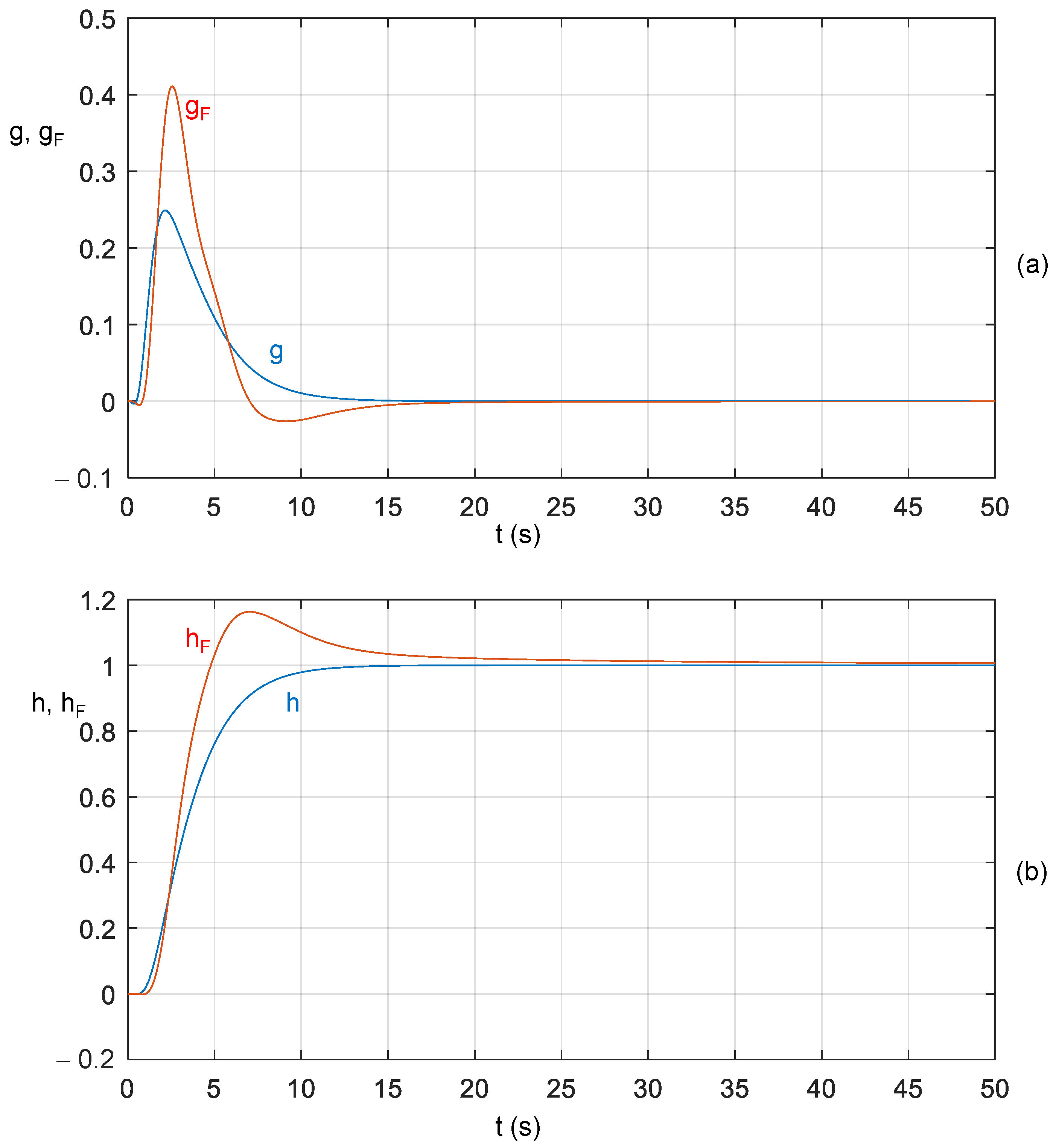
Figure 1 shows the plots of the corresponding impulse and step responses in MATLAB. For illustration, the responses of the IOS (
α = 1) were added. Since the same results were obtained in Micro-Cap, they were not added in
Figure 1.
It follows from the comparison of the IOS and FOS responses in
Figure 1 that the FOS responses exhibit less damping due to the increase in the
α parameter from 1 to 1.2. In [
35], only the step response
hF is published, and its exact comparison with the analysis results of
Figure 1 cannot be performed with the lack of numerical data. Therefore, the correctness of the results from
Figure 1 was verified with the FFT test.
9.2. Commensurate Fractional-Order Sallen–Key Filter
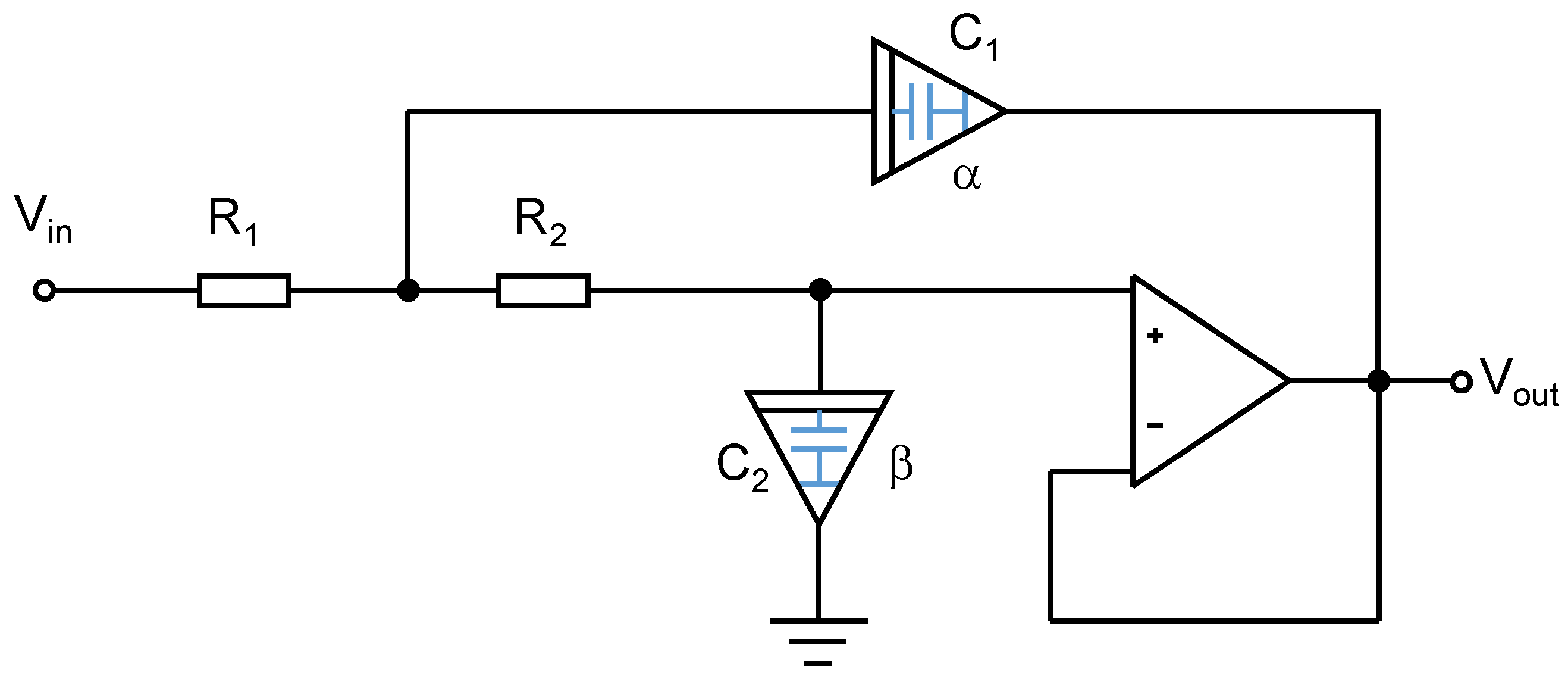
Figure 2 shows a simplified version of the Sallen–Key filter from [
35] with an operational amplifier as the voltage buffer. Instead of classical capacitors, fractors of the impedances 1
/(
sα C1) and 1
/(
sβ C2) are used, where
α,
β ∈ R+.
For
α =
β, the filter behaves like a commensurate FOS with the transfer function
where the pseudo-natural frequency and pseudo-quality factor are given by
Transfer function (59) can be rewritten in the form
where
is the corner frequency of the asymptotic frequency characteristic of the fractional filter.
Consider the Sallen–Key filter with the following parameters:
It can be shown that Q = 5 and the corner frequency f0F = ω0F/(2π) is 1 kHz. Note that the natural frequency of the associated IOS, resulting from (60), is about 174 Hz.
First, the impulse response for the case
α = 1 will be found. Transfer function (59) has a pair of complex conjugate poles
According to
Table 3, the impulse response is
Hence the impulse and step responses of the fractional filter are
If the parameters
C1 and
C2 in the filter are changed to have the values
C1 =
C2 = 10 nF, then the corner and natural frequencies are preserved, but the quality factor is reduced to 0.5. This will correspond to an integer-order filter with critical damping and the two-fold real pole −
ω0. For critical damping, the impulse response has the form
The corresponding responses of the fractional filter are then as follows:
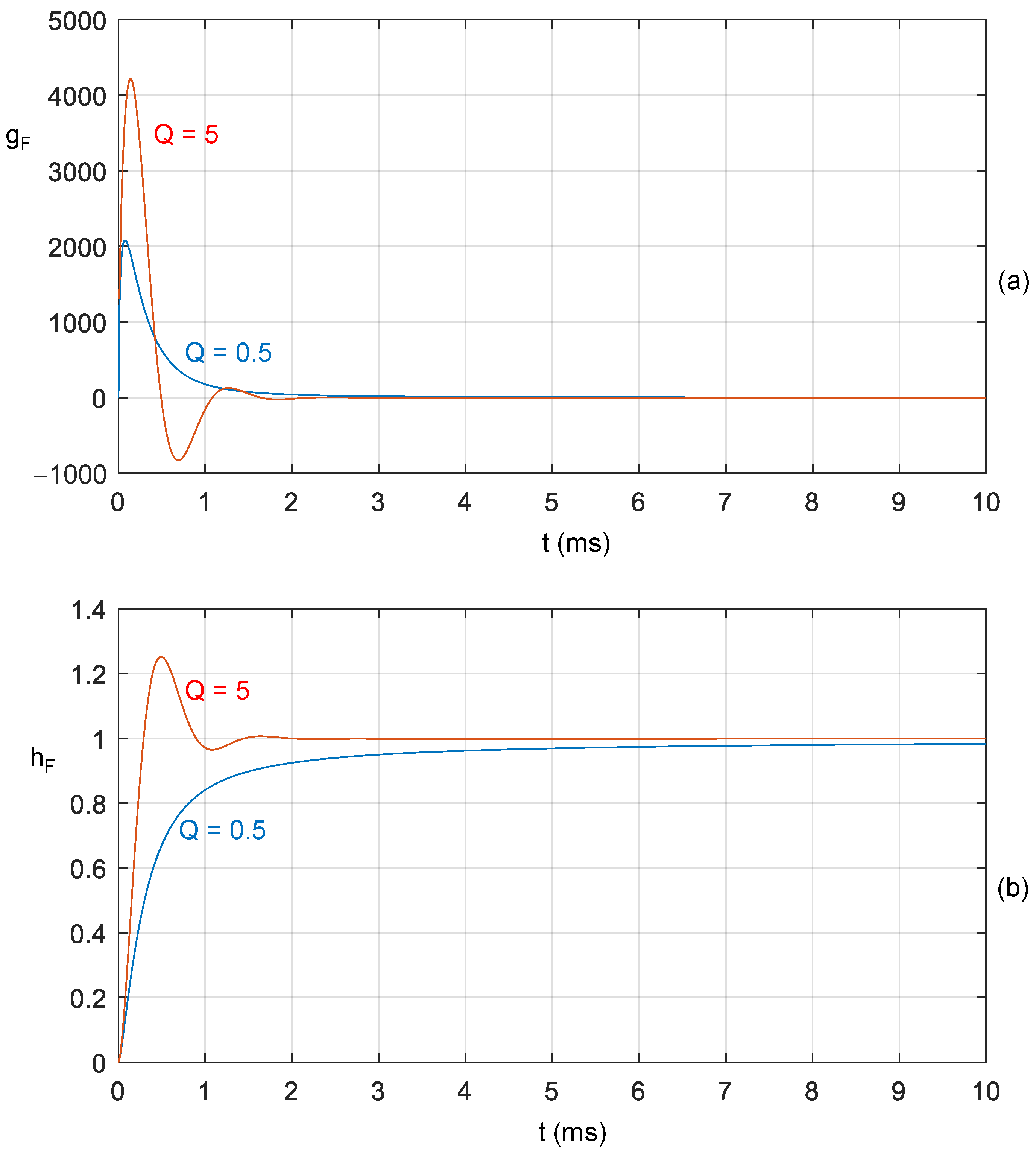
The respective waveforms computed in MATLAB are shown in
Figure 3.
The obtained plots of the impulse and step responses satisfy the check for the basic features (the limit values at times zero and infinity are correct, and the local maxima and minima of the step response correspond to the impulse response passages through zero). Looking at the step response for Q = 5, we find a much smaller overshoot than for classical second-order IOS. This observation is consistent with the well-known fact that lowering the order 2α below 2 (i.e., α = 0.8 < 1) acts as additional damping.
The filter in
Figure 2 was also modeled in SPICE. Two different models were used:
Model 1: Modeling transfer function (61) using the Laplace voltage-controlled voltage source.
Model 2: Model of the circuit in
Figure 2.
In Model 2, for a conclusive comparison with the MATLAB results, the OpAmp follower was modeled with a simple controlled source (gain = 1). The fractors were modeled with Laplace current-controlled voltage sources.
Regarding the Micro-Cap outputs, Models 1 and 2 show a perfect match with the MATLAB results.
However, the experiments revealed errors in the SPICE transient analysis if the fractional-order filter was set to an unstable mode due to an inappropriately chosen parameter α. In contrast, the method based on basis functions gives correct results.
The stability analysis of transfer function (59) or (61), respectively, leads to the observation that the fractional-order Sallen–Key filter in
Figure 2 is stable for
For Q = 5, the threshold value of the parameter α is 1.0638.
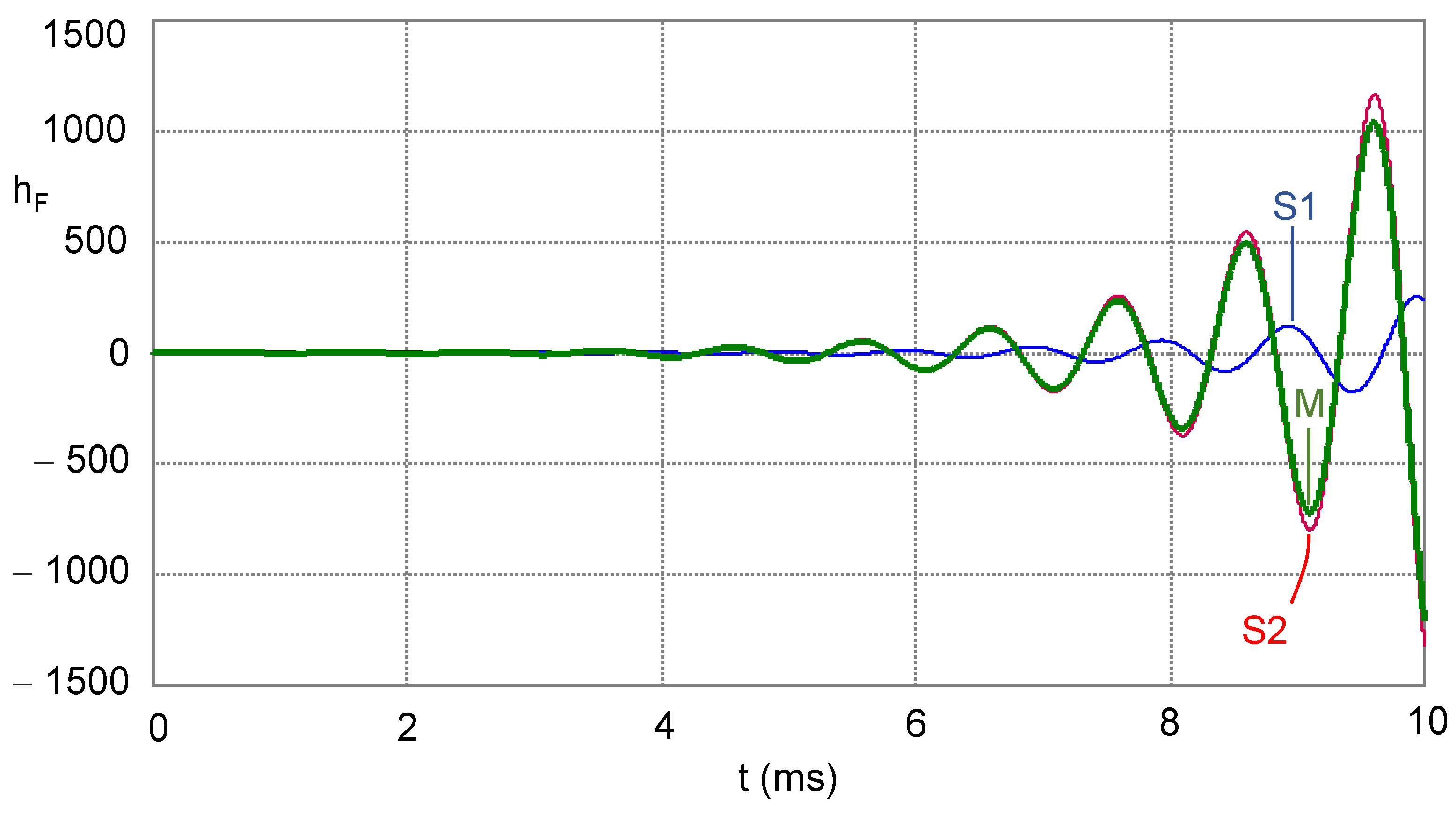
The filter was re-designed for
α = 1.15, i.e., for the unstable mode. For
Q = 5 and
f0F = 1 kHz, it now comes out as
Figure 4 shows the results of the simulation of the step response in Micro-Cap. The simulation was performed with default simulation parameters and with a step ceiling of 10 μs, which is one thousandth of the simulation time. For comparison, data from MATLAB were imported into the simulation program environment, showing the results obtained with the basis functions method.
Figure 4 shows that Micro-Cap calculates completely different responses for Models 1 and 2, which should be interchangeable. The response for Model 2 is close to the response computed from the basis functions in MATLAB. The FFT check cannot be used to verify the results because the system is unstable. However, by lowering the step ceiling 100-fold to 0.1 μs, the simulation program can be forced to perform a more accurate, but time-consuming, transient analysis. Then, the step response obtained using Method 2 is overlaid with the response computed using MATLAB.
The above pitfalls of the transient analysis of FOS in a SPICE simulation environment certainly deserve attention. The unpleasant fact is that different SPICE-family programs may deal with the same simulation task differently depending on the properties of their internal algorithms, and that the particular simulator chosen may evaluate the response differently depending on how the model of a fractional-order circuit is constructed. The cause should be sought in the specifics of the method of a convolutional transient analysis that SPICE uses to solve circuits with Laplace sources. Anyway, the method utilizing basis functions does not deal with such problems in principle.










{kind=link}
{kind=link}
{kind=link}
{kind=link}