
Automation of Winglet Wings Geometry Generation for Its Application in TORNADO

 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Methods
2.1. Definition of the Main Wing
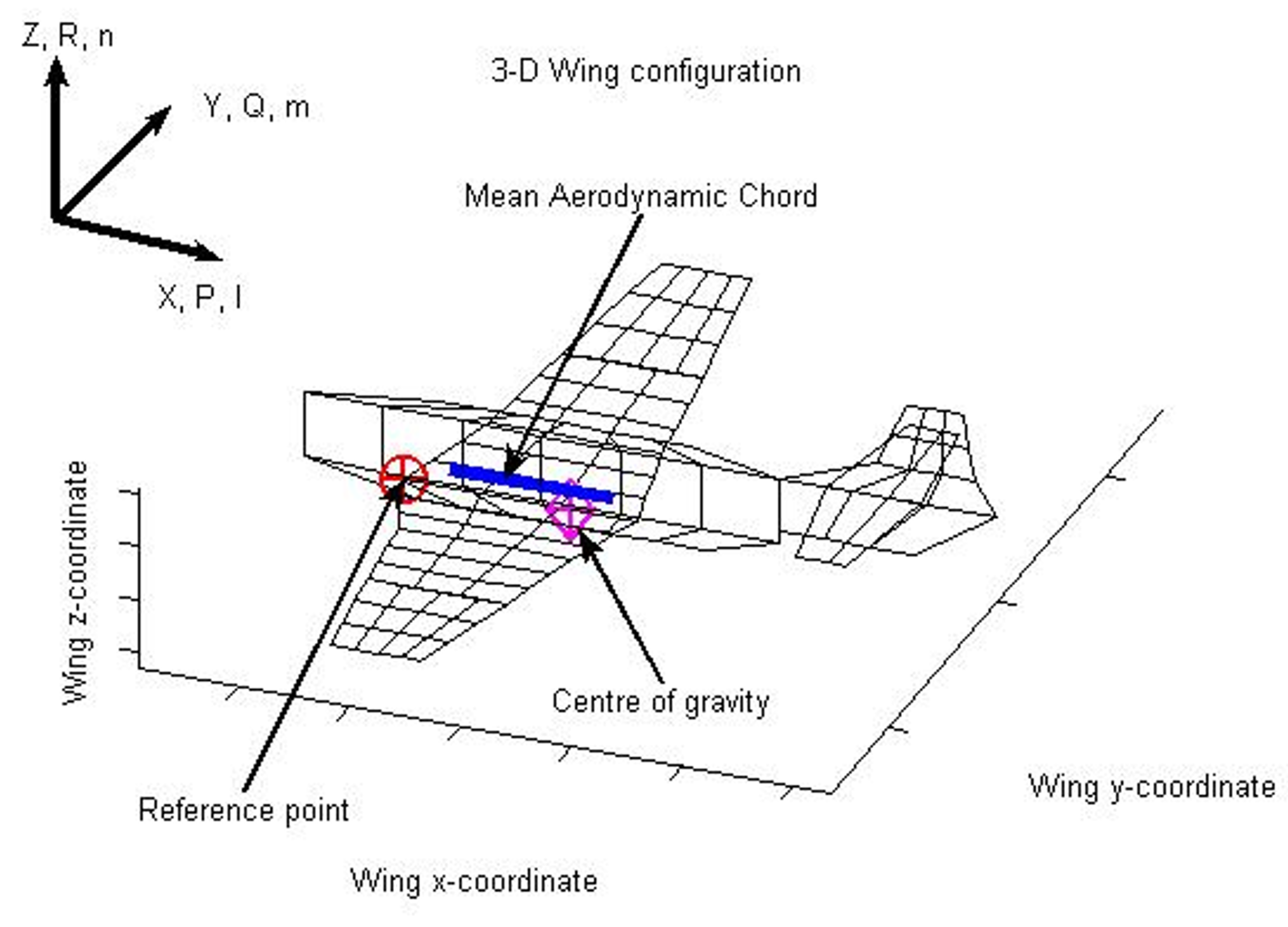
2.1.1. Aircraft Reference Points
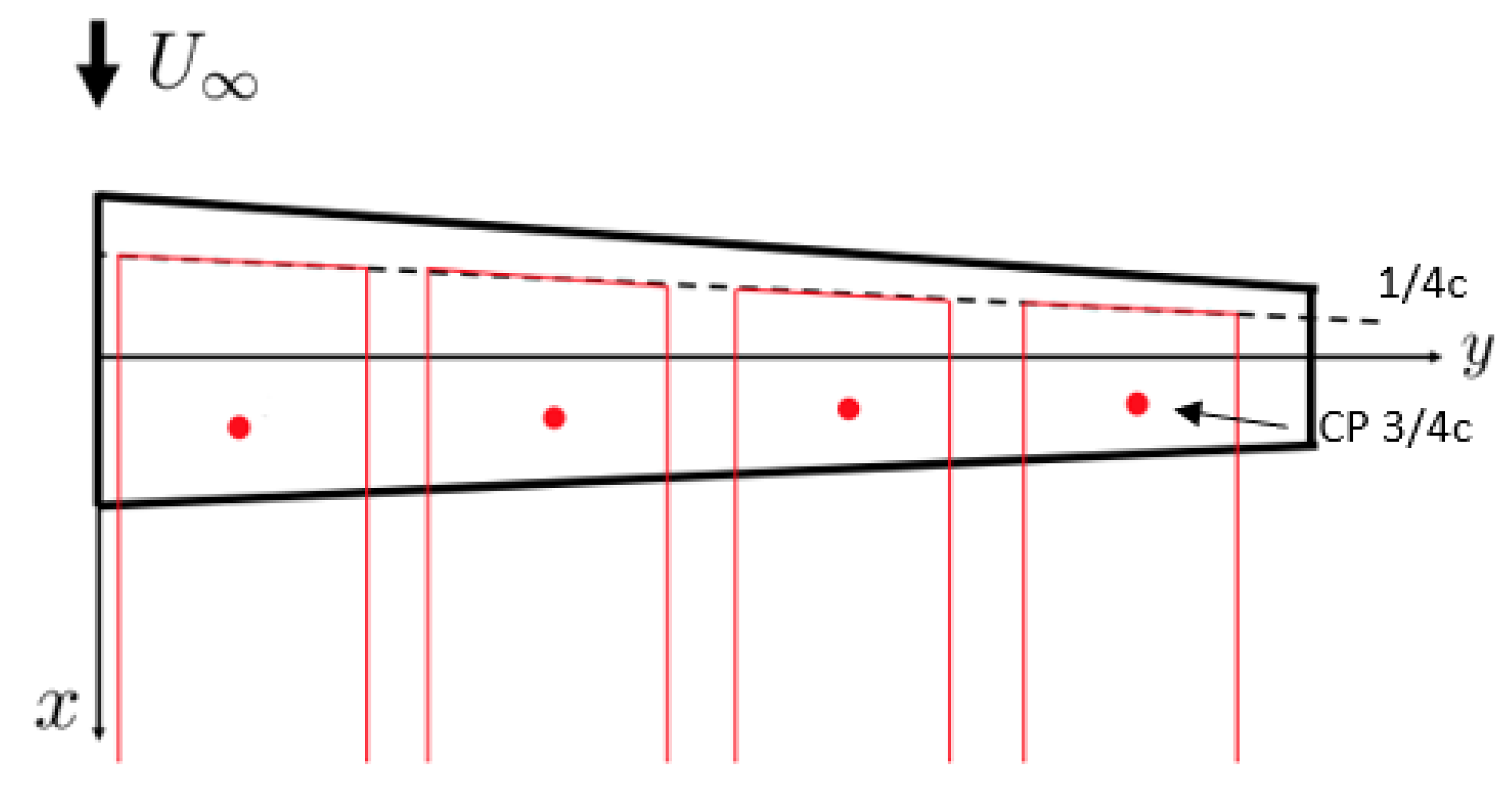
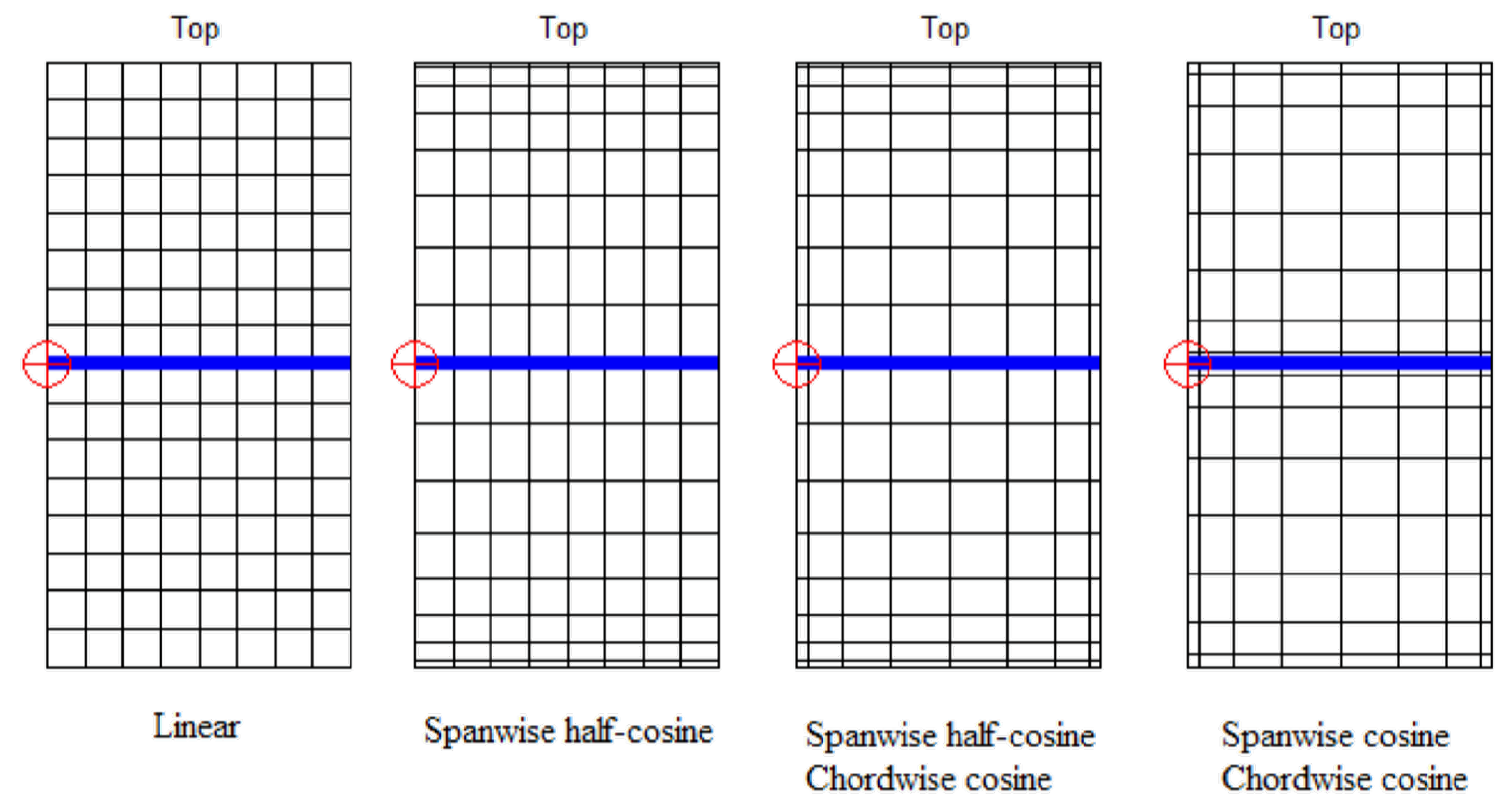
2.1.2. Vortex Lattice Method (VLM) Parameters
| Algorithm 1 Mesh algorithm. |
|
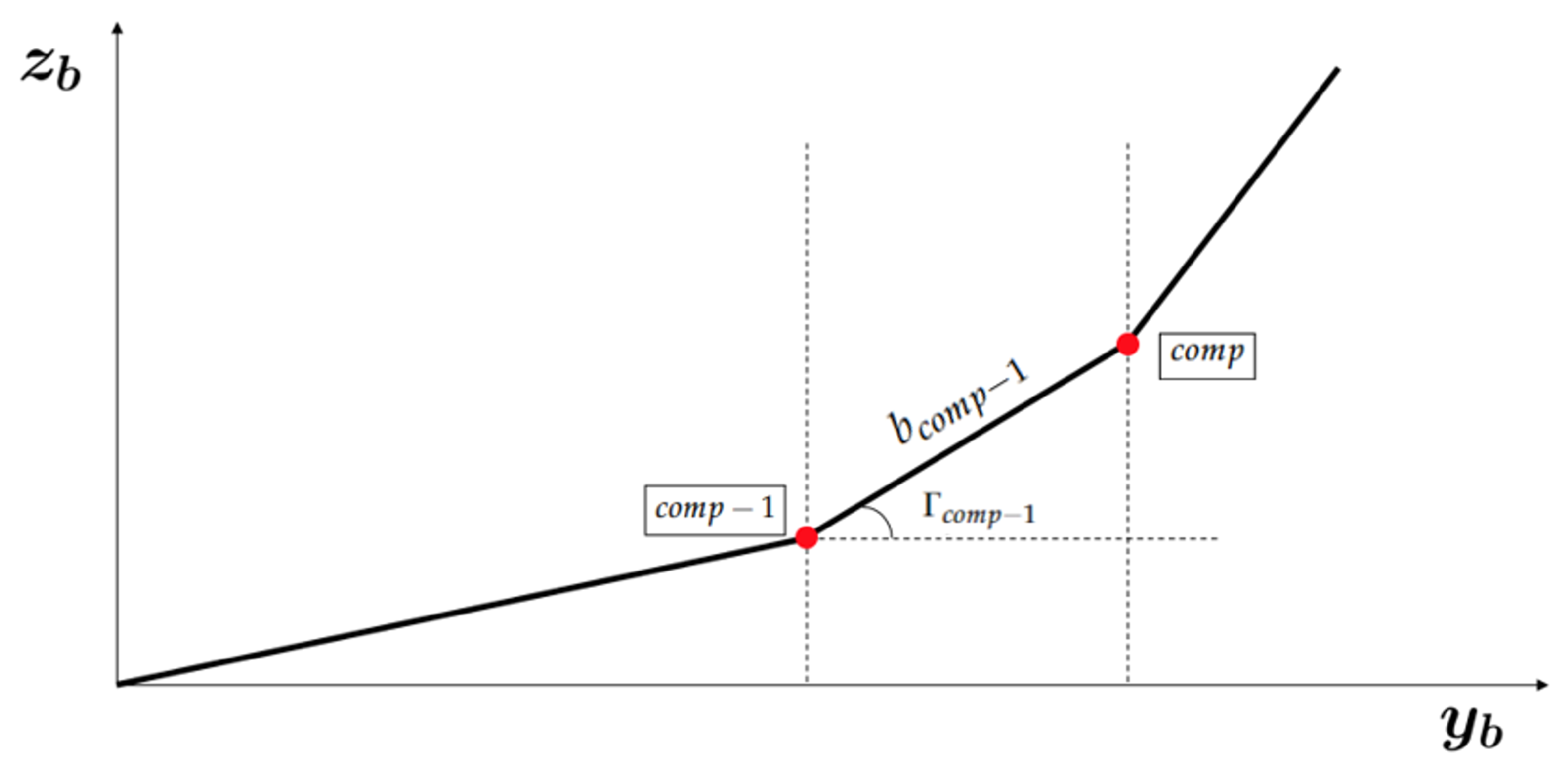
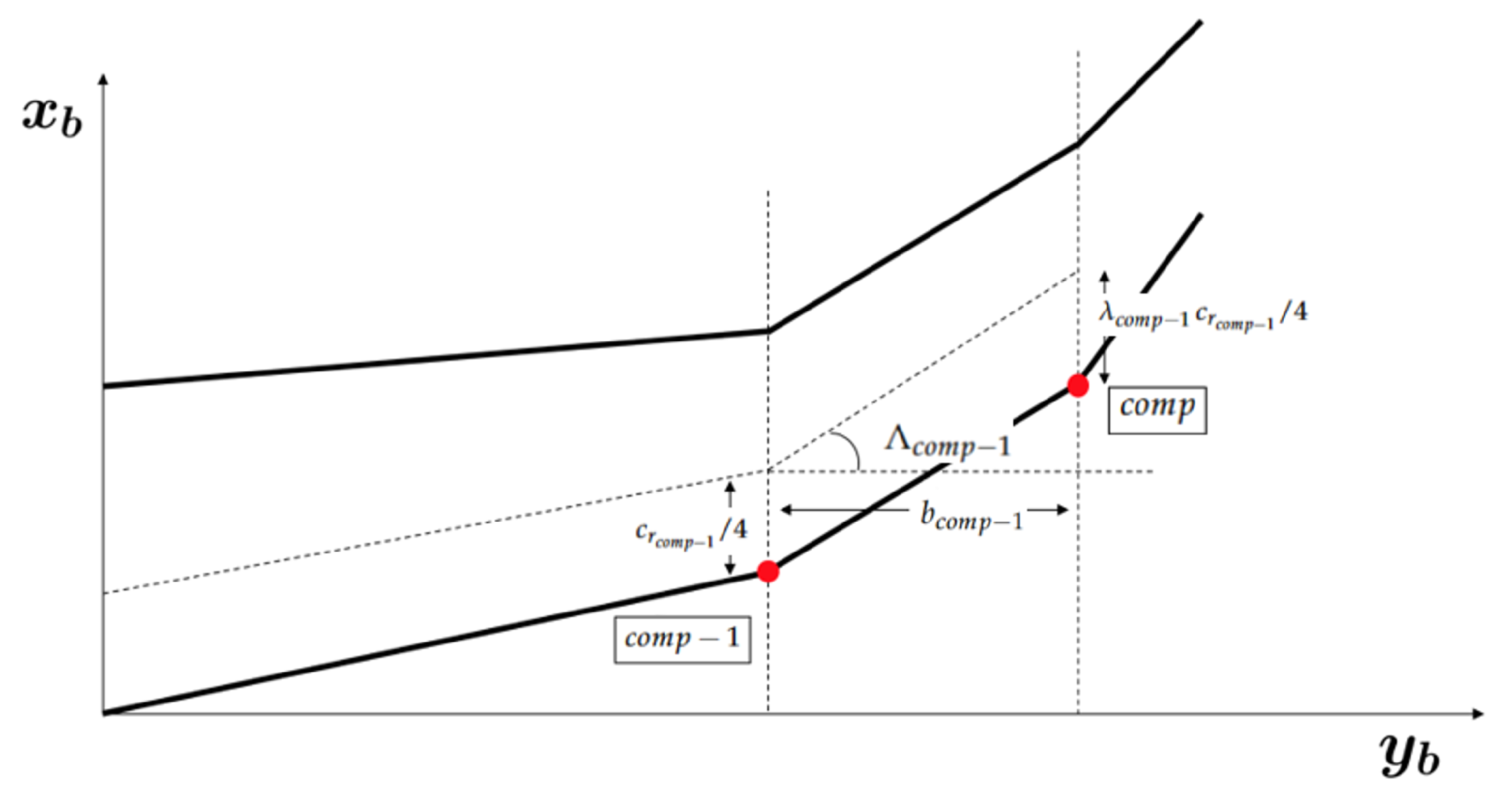
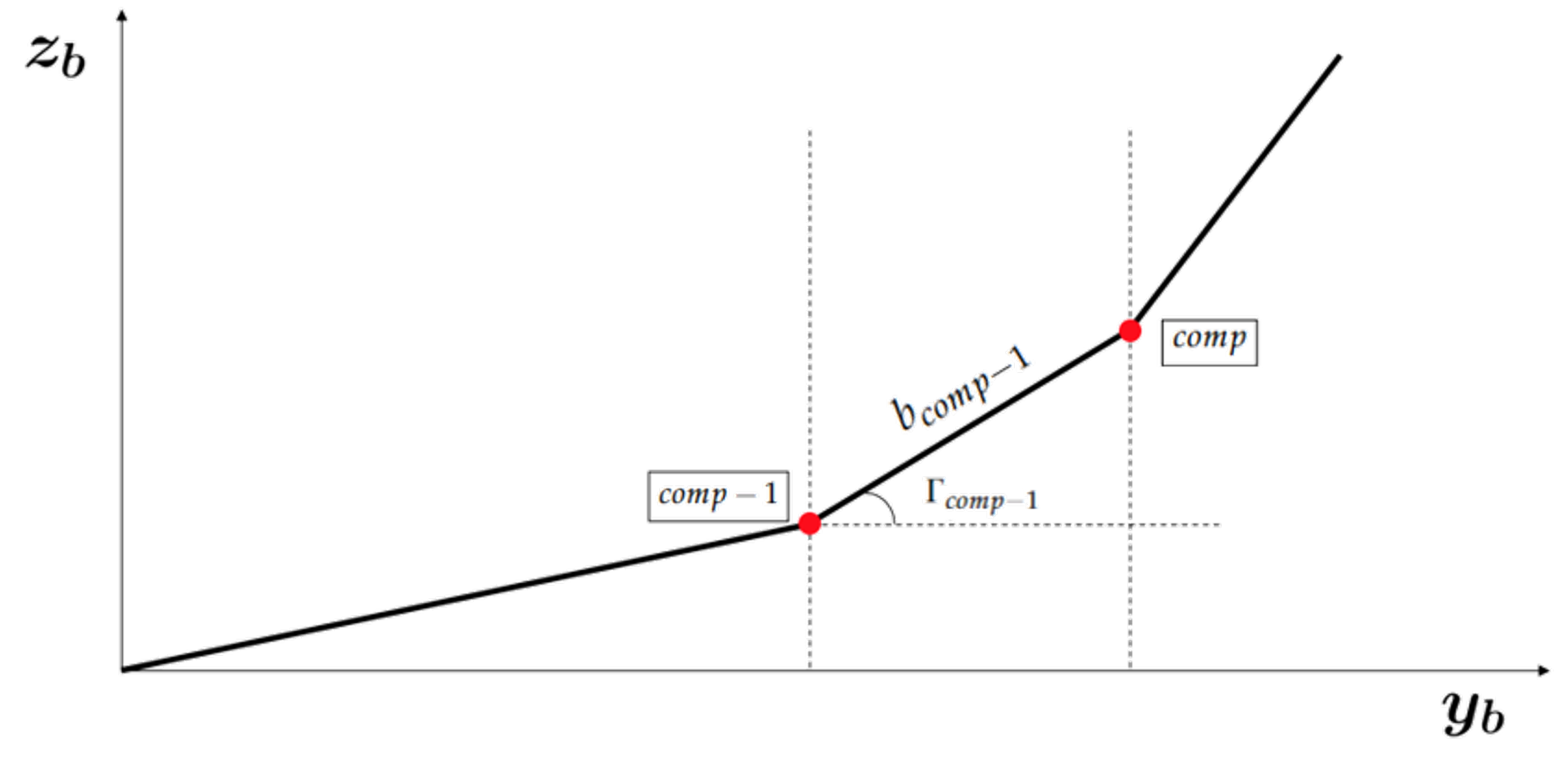
2.1.3. Wing Parameters
| Algorithm 2 Wing parameters algorithm. |
|
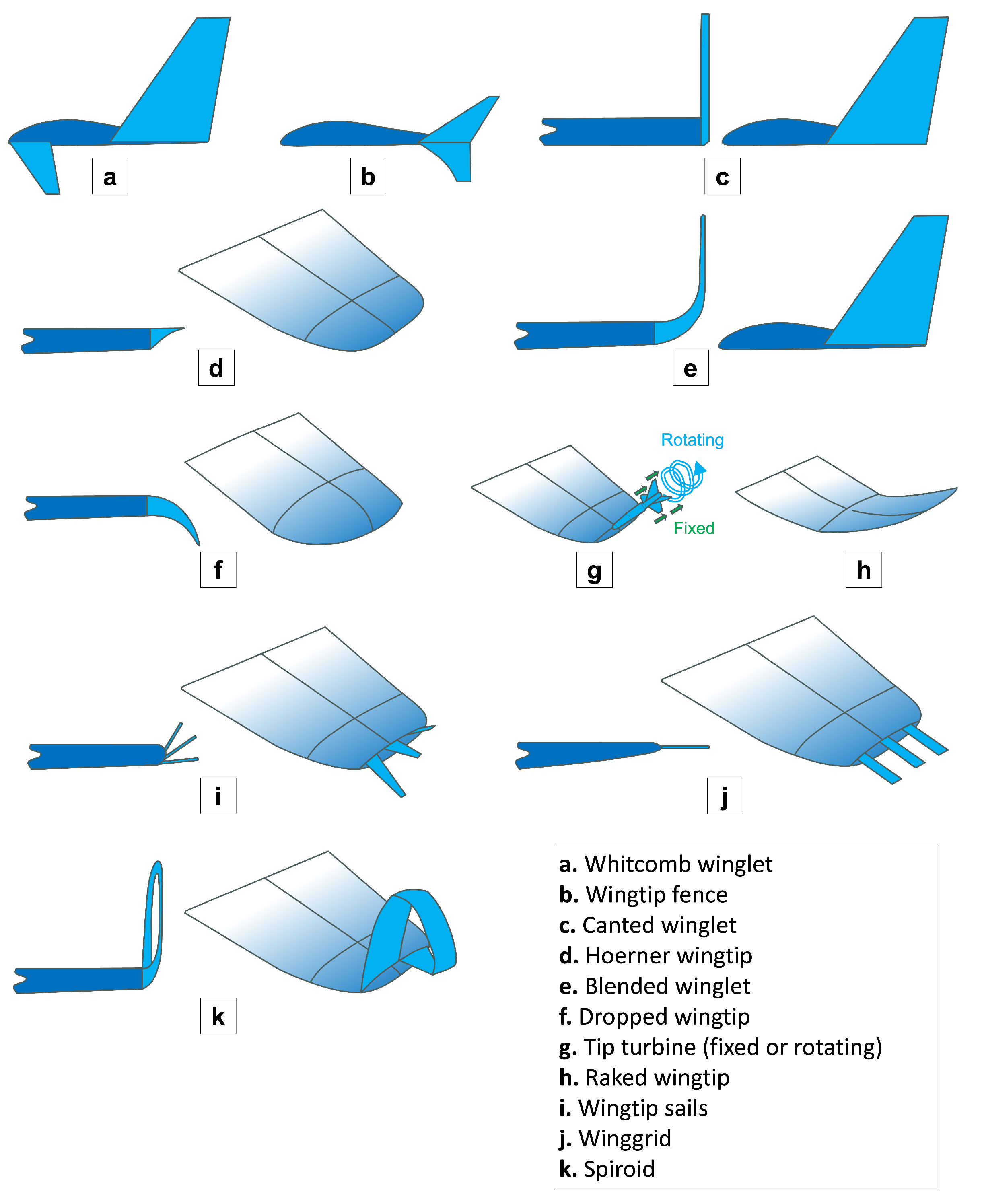
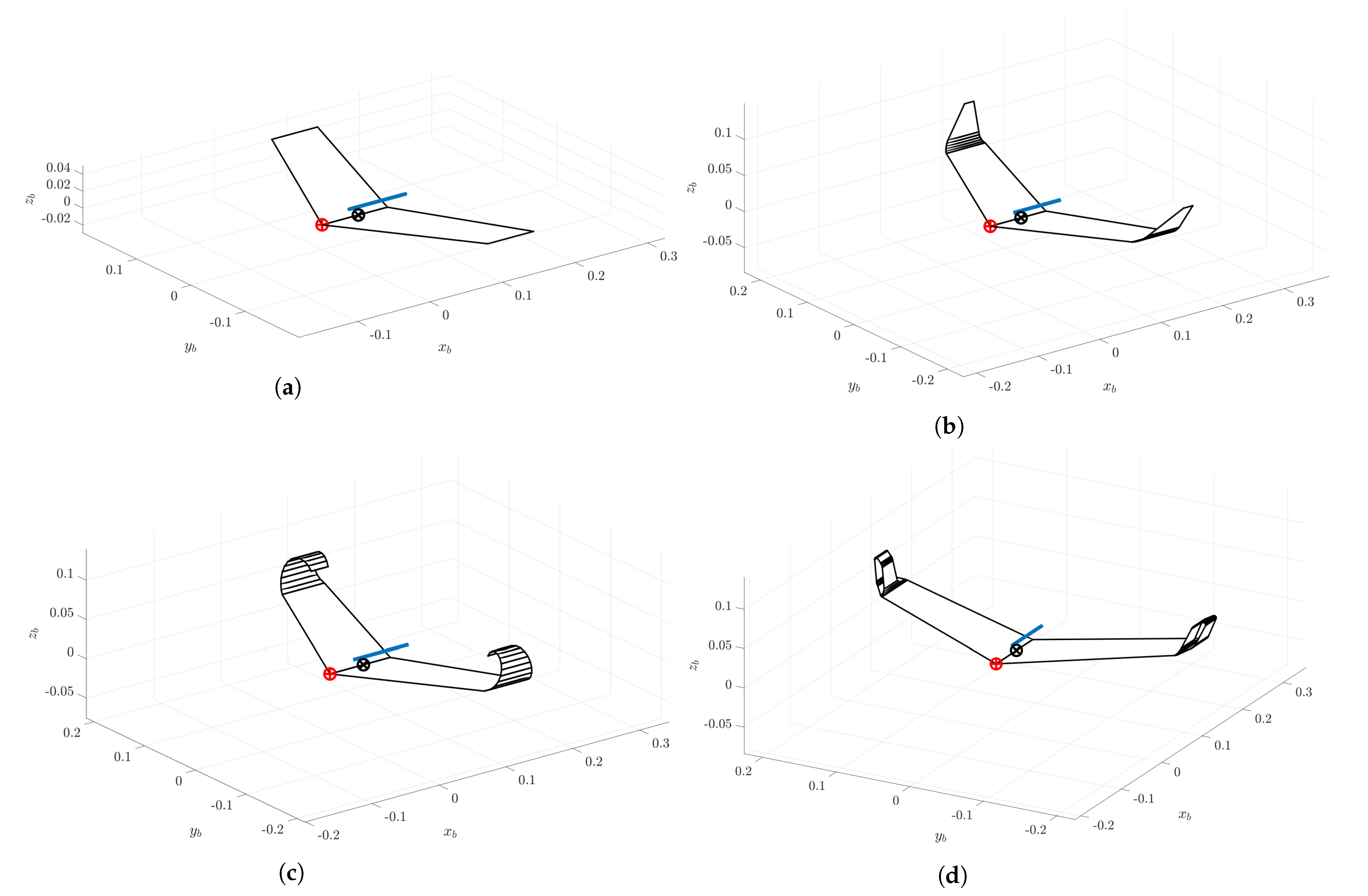
2.2. Definition of the Wingtip Devices
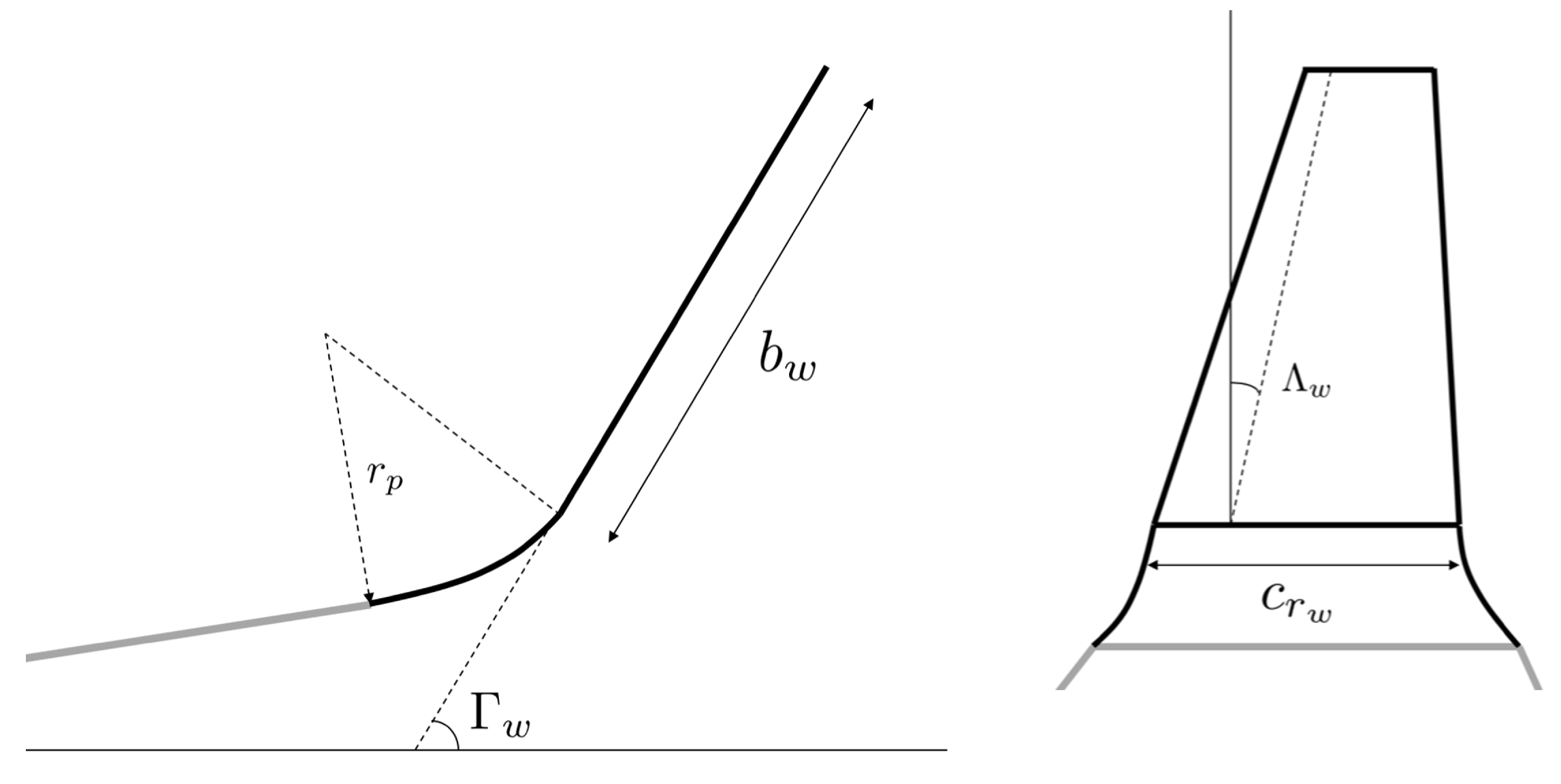
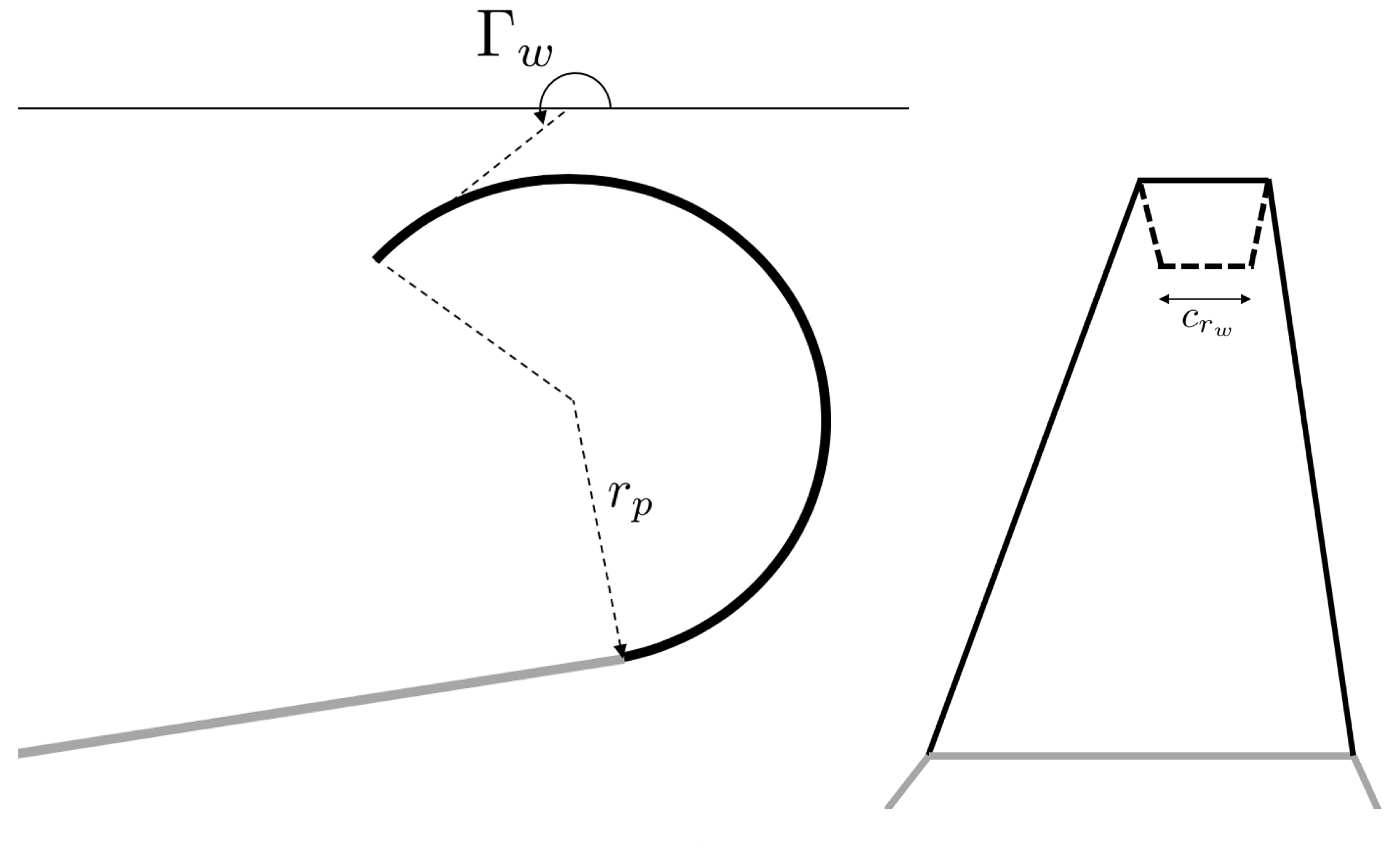
2.2.1. Blended Winglet
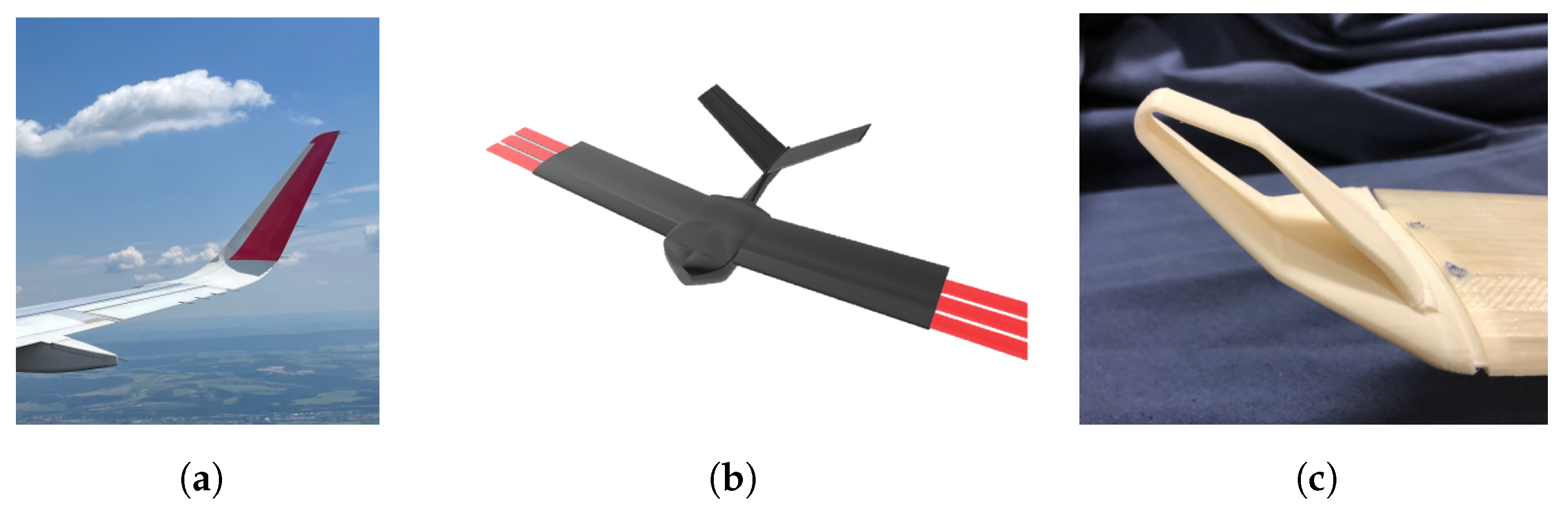
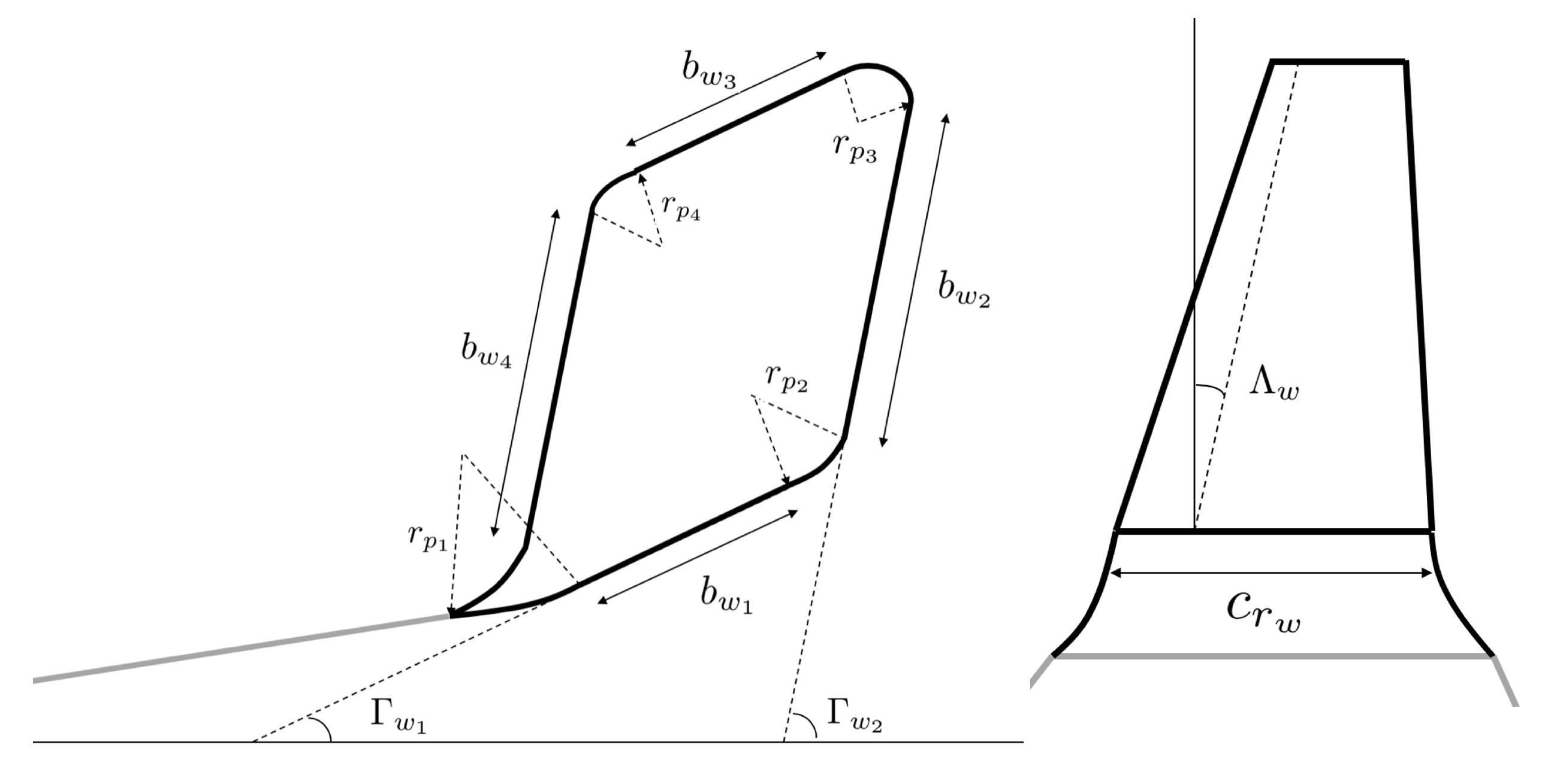
2.2.2. Open and Closed Spiroid Winglet
| Algorithm 3 Blended winglet parameters algorithm. |
|
| Algorithm 4 Blended winglet parameters algorithm. |
|
3. Results and Discussion
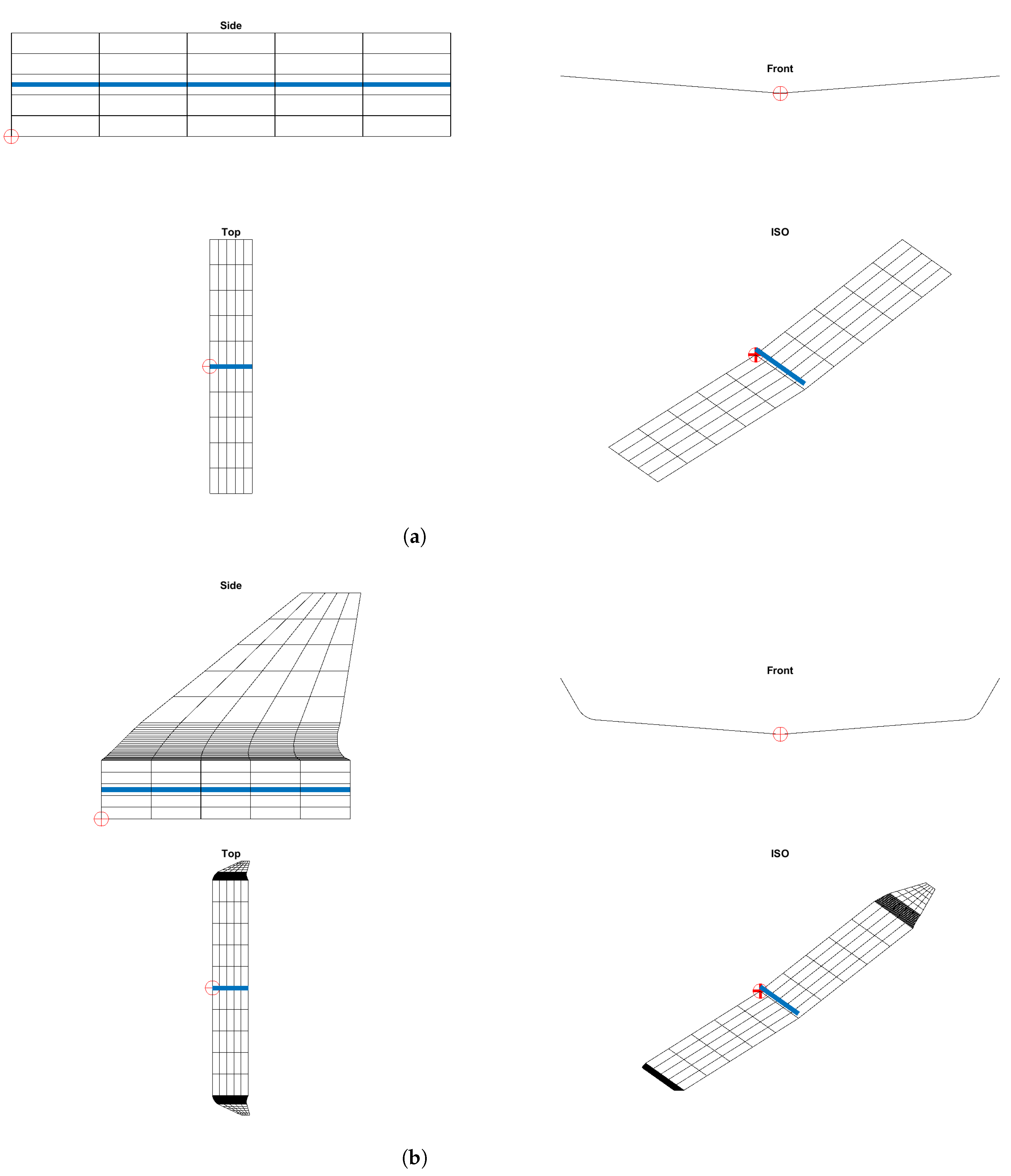
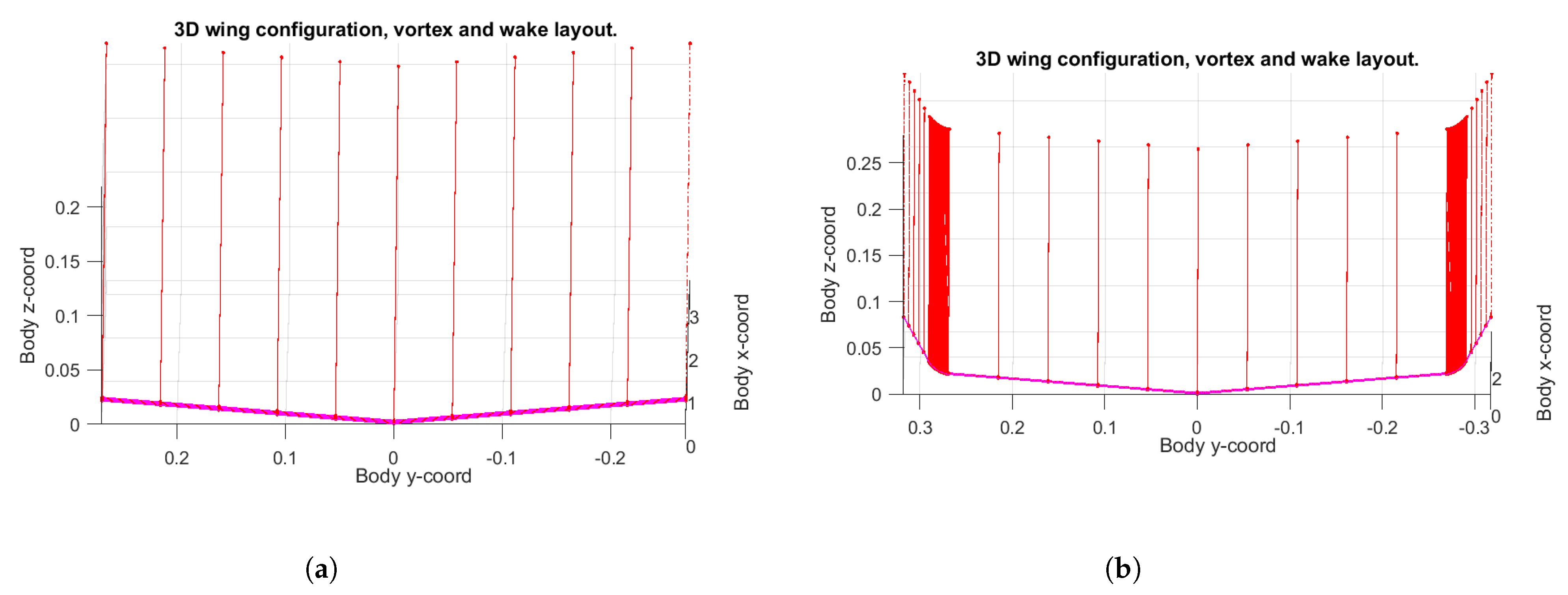
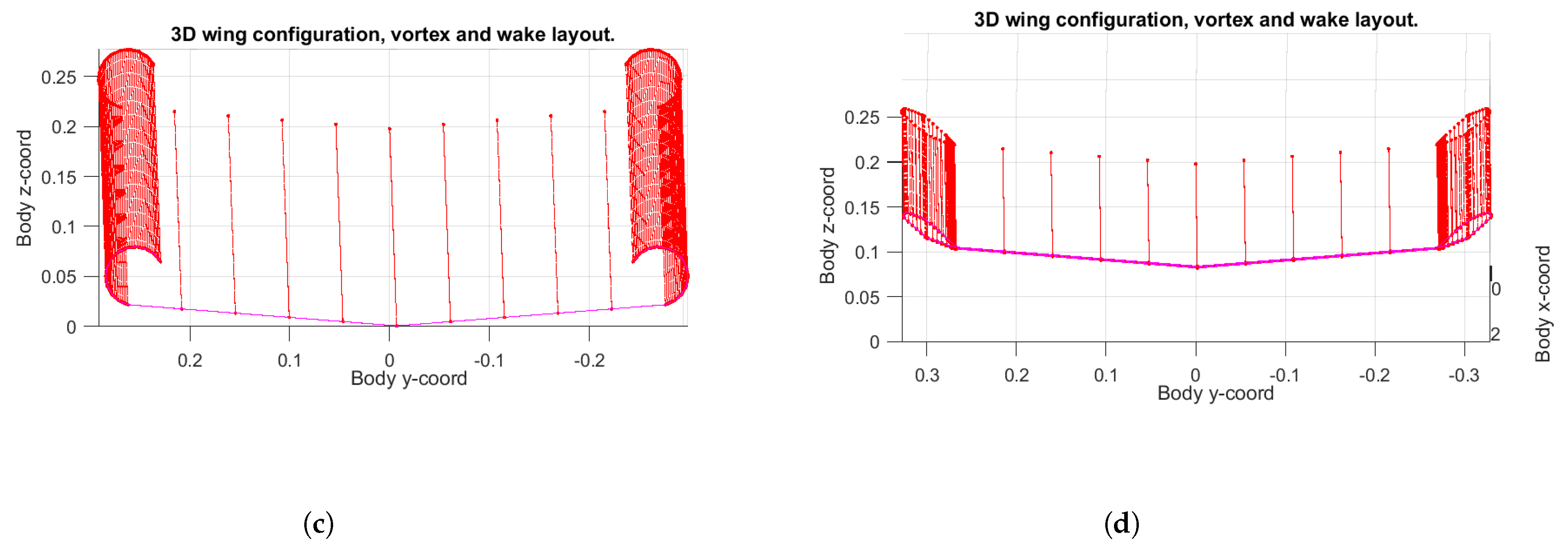
3.1. Algorithm Implemented in TORNADO
3.2. CFD Comparisons
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CFD | Computational fluid dynamics |
| Number of wings | |
| Number of parts | |
| VLM | Vortex Lattice Method |
| LD | Linear dichroism |
| Number of panels in chord | |
| Number of panels in semi-span | |
| b | Wingspan |
| Root chord | |
| Wing taper | |
| Wing sweep | |
| Wing dihedral | |
| Total | |
| w | Wing |
| Component | |
| Increment | |
| Radius according |
References
- White, F.M. Fluid Mechanics; McGraw Hill: New York, NY, USA, 1990. [Google Scholar]
- Bertin, J.J.; Cummings, R.M. Aerodynamics for Engineers; Cambridge University Press: Cambridge, UK, 2021. [Google Scholar]
- Katz, J.; Plotkin, A. Low-Speed Aerodynamics; Cambridge University Press: Cambridge, UK, 2001; Volume 13. [Google Scholar]
- Yu, F.; Bartasevicius, J.; Hornung, M. Comparing Potential Flow Solvers for Aerodynamic Characteristics Estimation of the T-FLEX UAV. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]
- Roccia, B.A.; Preidikman, S.; Massa, J.C. Modified Unsteady Vortex-Lattice Method to Study Flapping Wings in Hover Flight. AIAA J. 2013, 51, 2628–2642. [Google Scholar] [CrossRef]
- Official Website of the Product AVL. Available online: http://web.mit.edu/drela/Public/web/avl/ (accessed on 22 August 2023).
- Surfaces—Vortex-Lattice Module; Great OWL Publishing: Ephrata, PA, USA, 2009.
- Official Website of VSPAERO. Available online: https://openvsp.org/wiki/doku.php?id=vspaerotutorial (accessed on 22 August 2023).
- Gabor, O.S.; Koreanschi, A.; Botez, R.M. A new non-linear Vortex Lattice Method: Applications to wing aerodynamic optimizations. Chin. J. Aeronaut. 2016, 29, 1178–1195. [Google Scholar] [CrossRef]
- Rom, J.; Melamed, B.; Almosnino, D. Experimental and Nonlinear Vortex Lattice Method Results for Various Wing-Canard Configurations. J. Aircr. 1993, 30, 207–212. [Google Scholar] [CrossRef]
- Joshi, H.; Thomas, P. Review of vortex lattice method for supersonic aircraft design. Aeronaut. J. 2023, 1–35. [Google Scholar] [CrossRef]
- Melin, T. User’s Guide and Reference Manual for Tornado; Royal Institute of Technology (KTH): Stockholm, Sweden, 2000. [Google Scholar]
- Kroo, I. Drag due to lift: Concepts for prediction and reduction. Annu. Rev. Fluid Mech. 2001, 33, 587–617. [Google Scholar] [CrossRef]
- Jupp, J. Wing aerodynamics and the science of compromise. Aeronaut. J. 2001, 105, 633–641. [Google Scholar] [CrossRef]
- Whitcomb, R.T. Langley Research Center and United States. A Design Approach and Selected Wind Tunnel Results at High Subsonic Speeds for Wing-Tip Mounted Winglets; National Aeronautics and Space Administration: Washington, DC, USA, 1976. [Google Scholar]
- Kuhlman, J.M.; Liaw, P. Winglets on low-aspect-ratio wings. J. Aircr. 1988, 25, 932–941. [Google Scholar] [CrossRef]
- Gratzer, J.L.B. Blended Winglet. U.S. Patent 5,348,253, 20 September 1994. [Google Scholar]
- Gratzer, J.L.B. Spiroid-Tipped Wing. U.S. Patent 5,102,06, 7 April 1992. [Google Scholar]
- Nazarinia, M.; Soltani, M.R.; Ghorbanian, K. Experimental study of vortex shapes behind a wing equipped with different winglets. J. Aerosp. Sci. Technol. 2006, 3, 1–20. [Google Scholar]
- Wan, T.; Lien, K.W. Aerodynamic efficiency study of modern spiroid winglets. J. Aeronaut. Astronaut. Aviat. 2009, 41, 23–29. [Google Scholar]
- Gavrilović, N.N.; Rašuo, B.P.; Dulikravich, G.S.; Parezanović, V.B. Commercial aircraft performance improvement using winglets. FME Trans. 2015, 43, 1–8. [Google Scholar] [CrossRef]
- Mostafa, S.; Bose, S.; Nair, A.; Abdul Raheem, M.; Majeed, T.; Mohammed, A.; Kim, Y. A parametric investigation of non-circular spiroid winglets. EPJ Web Conf. 2014, 67, 02077. [Google Scholar] [CrossRef]
- Guerrero, J.E.; Dario Maestro, D.; Bottaro, A. Biomimetic spiroid winglets for lift and drag control. Comptes Rendus Mec. 2012, 340, 67–80. [Google Scholar] [CrossRef]
- La Roche, U. Wing with a Wing Grid as the End Section. U.S. Patent 5,823,480, 20 October 1998. [Google Scholar]
- La Roche, U.; La Roche, H.L. Induced drag reduction using multiple winglets, looking beyond the prandtl-munk linear model. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004; p. 2120. [Google Scholar]
- Shelton, A.; Tomar, A.; Prasad, J.V.R.; Smith, M.; Komerath, N. Active multiple winglets for improved unmanned-aerial-vehicle performance. J. Aircr. 2006, 43, 110–116. [Google Scholar]
- Bennett, D.; Covert, E.; Oliver, T. The Wing Grid: A New Approach to Reducing Induced Drag; Massachusetts Institute of Technology: Cambridge, MA, USA, 2001. [Google Scholar]
- Faye, R.; Laprete, R.; Winter, M. Blended Winglets; Aero, Boeing: Arlington, VR, USA, 2002. [Google Scholar]
- Liu, H. Linear Strength Vortex Panel Method for NACA 4412 Airfoil. IOP Conf. Ser. Mater. Sci. Eng. 2018, 326, 012016. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aerodynamic Coefficient | Reference Wing TORNADO | Closed Spiroid Winglet TORNADO | Closed Spiroid Winglet Ansys-Fluent | Experimental Reference Wing |
|---|---|---|---|---|
| 0.21 | 0.27 | 0.22 | 0.21 | |
| 0.0156 | 0.0187 | 0.048 | 0.067 | |
| E | 13 | 14.55 | 4.51 | 3.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Sevillano, Á.A.; Bardera-Mora, R.; López-Cuervo-Alcaraz, A.; Anguita-Mazón, D.; Matías-García, J.C.; Barroso-Barderas, E.; Fernández-Antón, J. Automation of Winglet Wings Geometry Generation for Its Application in TORNADO. Algorithms 2023, 16, 439. https://doi.org/10.3390/a16090439
Rodríguez-Sevillano ÁA, Bardera-Mora R, López-Cuervo-Alcaraz A, Anguita-Mazón D, Matías-García JC, Barroso-Barderas E, Fernández-Antón J. Automation of Winglet Wings Geometry Generation for Its Application in TORNADO. Algorithms. 2023; 16(9):439. https://doi.org/10.3390/a16090439
Chicago/Turabian StyleRodríguez-Sevillano, Ángel Antonio, Rafael Bardera-Mora, Alejandra López-Cuervo-Alcaraz, Daniel Anguita-Mazón, Juan Carlos Matías-García, Estela Barroso-Barderas, and Jaime Fernández-Antón. 2023. "Automation of Winglet Wings Geometry Generation for Its Application in TORNADO" Algorithms 16, no. 9: 439. https://doi.org/10.3390/a16090439
APA StyleRodríguez-Sevillano, Á. A., Bardera-Mora, R., López-Cuervo-Alcaraz, A., Anguita-Mazón, D., Matías-García, J. C., Barroso-Barderas, E., & Fernández-Antón, J. (2023). Automation of Winglet Wings Geometry Generation for Its Application in TORNADO. Algorithms, 16(9), 439. https://doi.org/10.3390/a16090439