
A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services

Abstract
:1. Introduction
- characterizing the optimization problem faced by a municipality that hosts e-scooter sharing services and must choose which locations in its territory may be rented as reserved parking lots to sharing companies, with the aim of maximizing a return on renting, while taking into account spatial considerations and the parking needs of local residents;
- modeling the problem by Mathematical Programming techniques, in particular, deriving a Binary Linear Program, which is centered around the use of binary decision variables for representing whether a potential parking lot is offered for rental or not;
- proposing a modified Ant Colony Optimization solution algorithm that integrates techniques from Quantum Computing and Exact Neighborhood Search, since the optimization problem is NP-Hard and may prove challenging to solve even with state-of-the-art optimization software;
- reporting and discussing results of computational tests showing the higher performance of our proposed metaheuristic solution approach with respect to a state-of-the-art solver.
2. Problem Definition
3. Quantum-Based ACO Algorithm
| Algorithm 1 General canonical ACO Algorithm |
|
3.1. Ant-Based Solution Construction
3.2. Quantum-Based Pheromone Initialization and Update
3.3. MP-Based Improvement Search
- if ∧ then
- if = 1 ∧ then
- else .
| Algorithm 2 Hybrid Quantum-based ACO (HQ-ACO) |
|
4. Computational Tests
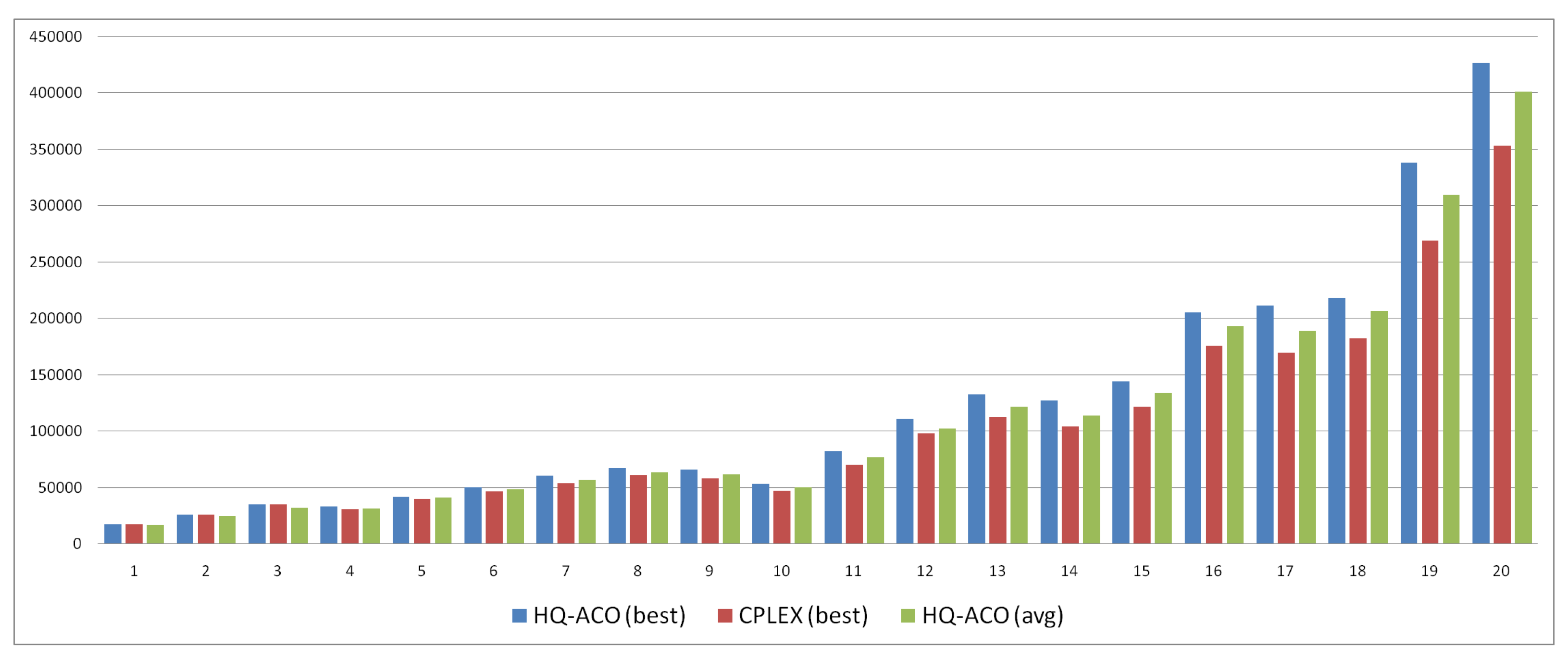
- For the first three instances of smaller size 1–3, CPLEX and HQ-ACO find an optimal solution to the problem (in this case, the percentage difference of their value v% is then equal to zero). For these instances, since CPLEX finds an optimal solution, we also note that the average value of feasible solutions found by HQ-ACO is naturally smaller than the best solution found by CPLEX.
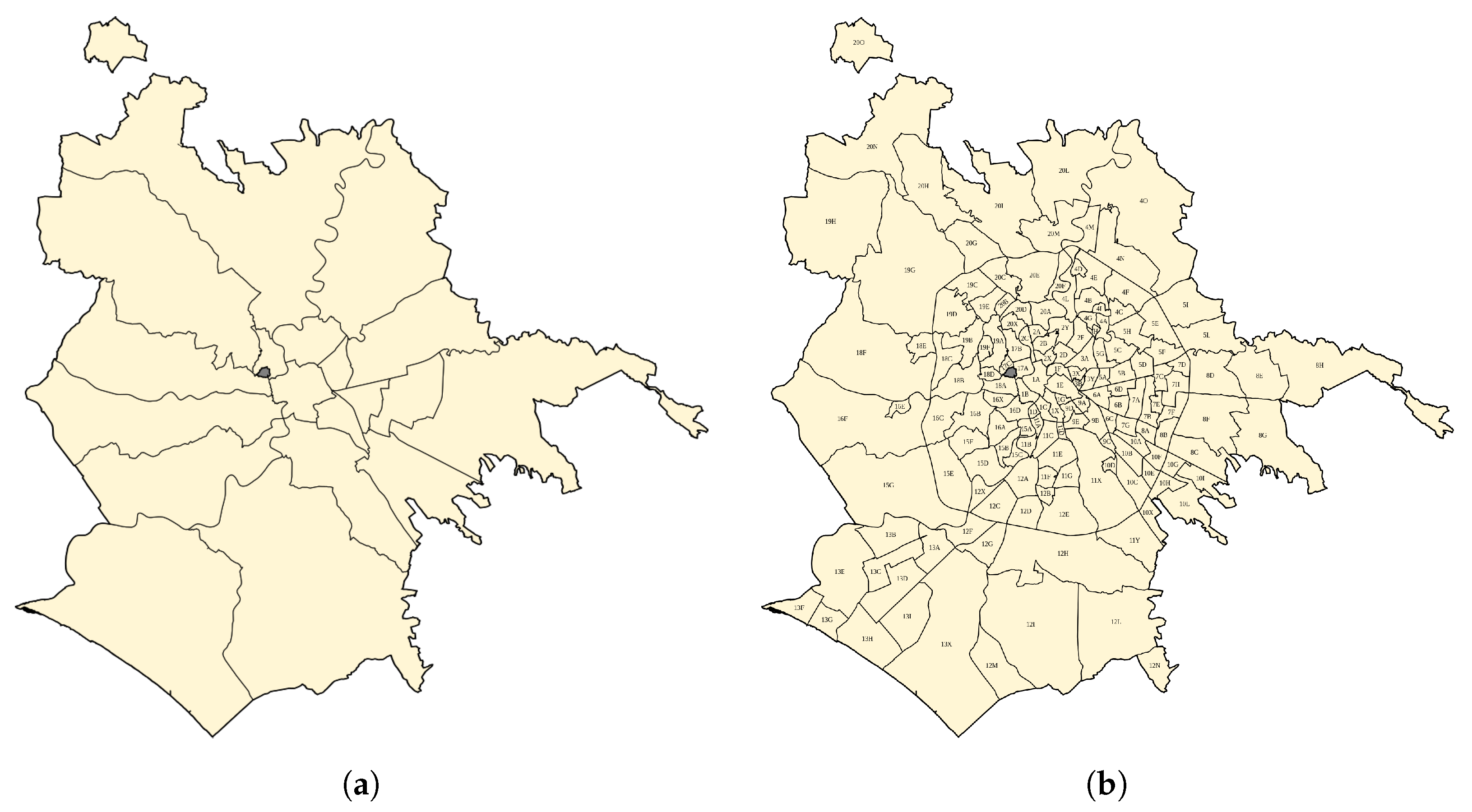
- For all the remaining instances, CPLEX is not able to find an optimal solution within the time limit and, for those of larger size from 13 to 20, it even encounters difficulties in identifying good quality solutions. This should not be a surprise: even though it has a neat mathematical structure, the problem BLP-ESPLR is NP-Hard and its difficulty rapidly increases as the size of the instances grows and the distribution of lots and parking becomes more articulated and introduces more complex correlation through the three distinct set of bound constraints. In contrast, HQ-ACO is able to find solutions of higher quality that, on average guarantee an increase in value of 13% and may exceed 20% in the case of the larger instances, obtaining more than a 25% increase for the instance with ID = 19. Looking more closely at the structure of the best solutions found, it is interesting to note that they tend to activate as many lots as possible including, in particular, those with a higher number of spaces, since they are typically associated with higher lot rental value per single space. Thanks to multiple bound constraints involving subdistricts and lot types, the distribution of the lots results fair, without neglecting outer districts that are often less considered when designing public transportation plans.
- For all the instances from ID 4 to ID 20, the average value of the feasible solutions identified by HQ-ACO is always higher than that of the best solution found by CPLEX. Naturally, this situation does not hold in the case of the three instances with ID 1–3 for which CPLEX finds an optimal solution. In the case of larger instances, the average value can be more than 10% higher with respect to CPLEX, granting a substantial amount of additional money from rental.
- Concerning computational time, looking at the final set of columns of the table, it can be noted that CPLEX needs a substantial amount of time to identify its best solution, taking more than 3000 s for most of the instances, with an average increase of about 28% with respect to the time that HQ-ACO requires to find its best solution.
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Federal Highway Administration United States Department of Transportation. Shared Mobility: Current Practices and Guiding Principles. Available online: https://ops.fhwa.dot.gov/publications/fhwahop16022/fhwahop16022.pdf (accessed on 31 December 2023).
- Lyons, G. Getting smart about urban mobility-aligning the paradigms of smart and sustainable. Transp. Res. Part A Policy Pract. 2018, 115, 4–14. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Cohen, A.P. Carsharing and personal vehicle services: Worldwide market developments and emerging trends. Int. J. Sustain. Transp. 2013, 7, 5–34. [Google Scholar] [CrossRef]
- Becker, H.; Ciari, F.; Axhausen, K.W. Measuring the car ownership impact of free-floating car-sharing—A case study in Basel, Switzerland. Transport. Res. D 2018, 65, 51–56. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Chen, F. When, What and How to Teach about Electric Mobility? An Innovative Teaching Concept for All Stages of Education: Lessons from Poland. Energies 2021, 14, 6440. [Google Scholar] [CrossRef]
- Zhu, J.; Xie, N.; Cai, Z.; Tang, W.; Chen, X. A comprehensive review of shared mobility for sustainable transportation systems. Int. J. Sustain. Transp. 2023, 17, 527–551. [Google Scholar] [CrossRef]
- Laa, B.; Leth, U. Survey of E-scooter users in Vienna: Who they are and how they ride. J. Transp. Geogr. 2020, 89, 102874. [Google Scholar] [CrossRef]
- Sanders, R.L.; Branion-Calles, M.; Nelson, T.A. To scoot or not to scoot: Findings from a recent survey about the benefits and barriers of using E-scooters for riders and non-riders. Transp. Part A 2020, 139, 217–227. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Folega, P.; Chen, F. Perception of Shared Electric Scooters: A Case Study from Poland. Sustainability 2023, 15, 12596. [Google Scholar] [CrossRef]
- Gössling, S. Integrating e-scooters in urban transportation: Problems, policies, and the prospect of system change. Transp. Res. Part D 2020, 79, 1–12. [Google Scholar] [CrossRef]
- Orozco-Fontalvo, M.; Llerena, L.; Cantillo, V. Dockless electric scooters: A review of a growing micromobility mode. Int. J. Sustain. Transp. 2023, 17, 406–422. [Google Scholar] [CrossRef]
- Azimian, A.; Jiao, J. Modeling factors contributing to dockless e-scooter injury accidents in Austin, Texas. Traffic Inj. Prev. 2022, 23, 107–111. [Google Scholar] [CrossRef] [PubMed]
- Kazemzadeh, K.; Haghani, M.; Sprei, F. Electric scooter safety: An integrative review of evidence from transport and medical research domains. Sustain. Cities Soc. 2023, 89, 104313. [Google Scholar] [CrossRef]
- Latinopoulos, C.; Patrier, A.; Sivakumar, A. Planning for e-scooter use in metropolitan cities: A case study for Paris. Transp. Res. Part D Transp. Environ. 2021, 100, 103037. [Google Scholar] [CrossRef]
- CNN. E-Scooters Suddenly Appeared Everywhere, but Now They’re Riding into Serious Trouble. 2019. Available online: https://edition.cnn.com/travel/article/electric-scooter-bans-world/index.html (accessed on 31 December 2023).
- The Guardian. Rented E-Scooters Cleared from Paris Streets on Eve of Ban. 2023. Available online: https://www.theguardian.com/world/2023/aug/31/rented-e-scooters-cleared-from-paris-streets-on-eve-of-ban (accessed on 31 December 2023).
- Liazos, A.; Iliopoulou, C.; Kepaptsoglou, K.; Bakogiannis, E. Geofence planning for electric scooters. Transp. Res. Part D Transp. Environ. 2022, 102, 103149. [Google Scholar] [CrossRef]
- Ignaccolo, M.; Inturri, G.; Cocuzza, E.; Giuffrida, N.; Pira, M.L.; Torrisi, V. Developing micromobility in urban areas: Network planning criteria for e-scooters and electric micromobility devices. Transp. Res. Procedia 2022, 60, 448–455. [Google Scholar] [CrossRef]
- Sobrino, N.; Gonzalez, J.N.; Vassallo, J.M.; de los Angeles Baeza, M. Regulation of shared electric kick scooters in urban areas: Key drivers from expert stakeholders. Transp. Policy 2023, 134, 1–18. [Google Scholar] [CrossRef]
- Carrese, S.; D’Andreagiovanni, F.; Giacchetti, T.; Nardin, A.; Zamberlan, L. A Beautiful Fleet: Optimal Repositioning in E-scooter Sharing Systems for Urban Decorum. Transp. Res. Procedia 2021, 52, 581–588. [Google Scholar] [CrossRef]
- Carrese, S.; D’Andreagiovanni, F.; Giacchetti, T.; Nardin, A.; Zamberlan, L. Seek & Beautify: Integrating UAVs in the optimal beautification of e-scooter sharing fleets. In Proceedings of the 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Deveci, M.; Gokasar, I.; Pamucar, D.; Chen, Y.; Coffman, D. Sustainable E-scooter parking operation in urban areas using fuzzy Dombi based RAFSI model. Sustain. Cities Soc. 2023, 91, 104426. [Google Scholar] [CrossRef]
- Sandoval, R.; Van Geffen, C.; Wilbur, M.; Hall, B.; Dubey, A.; Barbour, W.; Work, D.B. Data driven methods for effective micromobility parking. Transp. Res. Interdiscip. Perspect. 2021, 10, 100368. [Google Scholar] [CrossRef]
- Zakhem, M.; Smith-Colin, J. Micromobility implementation challenges and opportunities: Analysis of e-scooter parking and high-use corridors. Transp. Res. Part D Transp. Environ. 2021, 101, 103082. [Google Scholar] [CrossRef]
- Carrese, S.; D’Andreagiovanni, F.; Giacchetti, T.; Nardin, A.; Zamberlan, L. An optimization model for renting public parking slots to carsharing services. Transp. Res. Procedia 2020, 45, 499–506. [Google Scholar] [CrossRef]
- Carrese, S.; D’Andreagiovanni, F.; Giacchetti, T.; Nardin, A.; Zamberlan, L. An optimization model and genetic-based matheuristic for parking slot rent optimization to carsharing. Res. Transp. Econ. 2021, 85, 100962. [Google Scholar] [CrossRef]
- City of Rome-DGC225. 2022. Deliberazione Giunta Comunale n.225. Available online: https://www.comune.roma.it/servizi2/deliberazioniAttiWeb/home (accessed on 31 December 2023). (In Italian).
- Xu, Z. The knapsack problem with a minimum filling constraint. Nav. Res. Logist. 2013, 60, 56–63. [Google Scholar] [CrossRef]
- IBM ILOG CPLEX. Available online: http://www-01.ibm.com/software (accessed on 31 December 2023).
- GNU Linear Programming Kit. Available online: https://www.gnu.org/software/glpk/ (accessed on 31 December 2023).
- Ma, Z.; Wu, G.; Suganthan, P.N.; Song, A.; Luo, Q. Performance assessment and exhaustive listing of 500+ nature-inspired metaheuristic algorithms. Swarm Evol. Comput. 2023, 77, 101248. [Google Scholar] [CrossRef]
- Molina, D.; Poyatos, J.; Ser, J.D.; García, S.; Hussain, A.; Herrera, F. Comprehensive Taxonomies of Nature- and Bio-inspired Optimization: Inspiration Versus Algorithmic Behavior, Critical Analysis Recommendations. Cogn. Comput. 2020, 12, 897–939. [Google Scholar] [CrossRef]
- Chih, M. Stochastic stability analysis of particle swarm optimization with pseudo random number assignment strategy. Eur. J. Oper. Res. 2023, 305, 562–593. [Google Scholar] [CrossRef]
- Lu, F.; Huang, M.; Ching, W.; Siu, T.K. Credit portfolio management using two-level particle swarm optimization. Inf. Sci. 2013, 237, 162–175. [Google Scholar] [CrossRef]
- Lu, F.; Chen, W.; Feng, W.; Bi, H. 4PL routing problem using hybrid beetle swarm optimization. Soft Comput. 2023, 27, 17011–17024. [Google Scholar] [CrossRef]
- Wen, H.; Wang, S.X.; Lu, F.; Feng, M.; Wang, L.Z.; Xiong, J.K.; Si, M.C. Colony search optimization algorithm using global optimization. J. Supercomput. 2022, 78, 6567–6611. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybernet.-Part B 1996, 26, 29–41. [Google Scholar] [CrossRef]
- Blum, C.; Puchinger, J.; Raidl, G.R.; Roli, A. Hybrid metaheuristics in combinatorial optimization: A survey. Appl. Soft Comput. 2011, 11, 4135–4151. [Google Scholar] [CrossRef]
- Dorigo, M.; Blum, C. Ant colony optimization theory: A survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- Lu, F.; Feng, W.; Gao, M.; Bi, H.; Wang, S. The Fourth-Party Logistics Routing Problem Using Ant Colony System-Improved Grey Wolf Optimization. J. Adv. Transp. 2020, 2020, 8831746. [Google Scholar] [CrossRef]
- Mandal, A.K.; Dehuri, S. A Survey on Ant Colony Optimization for Solving Some of the Selected NP-Hard Problem. In Biologically Inspired Techniques in Many-Criteria Decision Making; BITMDM 2019; Learning and Analytics in Intelligent Systems; Dehuri, S., Ed.; Springer: Cham, Switzerland, 2020; Volume 10. [Google Scholar]
- Mavrovouniotis, M.; Anastasiadou, M.N.; Hadjimitsis, D. Measuring the Performance of Ant Colony Optimization Algorithms for the Dynamic Traveling Salesman Problem. Algorithms 2023, 16, 545. [Google Scholar] [CrossRef]
- Das, M.; Roy, A.; Maity, S.; Kar, S. A Quantum-inspired Ant Colony Optimization for solving a sustainable four-dimensional traveling salesman problem under type-2 fuzzy variable. Adv. Eng. Inform. 2023, 55, 101816. [Google Scholar] [CrossRef]
- D’Andreagiovanni, F.; Krolikowski, J.; Pulaj, J. A fast hybrid primal heuristic for multiband robust capacitated network design with multiple time periods. Appl. Soft Comput. 2015, 26, 497–507. [Google Scholar] [CrossRef]
- D’Andreagiovanni, F. Andreagiovanni, F. A Hybrid Exact-ACO Algorithm for the Joint Scheduling, Power and Cluster Assignment in Cooperative Wireless Networks. In Bio-Inspired Models of Network, Information, and Computing Systems; BIONETICS 2012; Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering; Di Caro, G., Theraulaz, G., Eds.; Springer: Cham, Switzerland, 2020; Volume 134. [Google Scholar]
- Maniezzo, V. Exact and Approximate Nondeterministic Tree-Search Procedures for the Quadratic Assignment Problem. INFORMS J. Comput. 1999, 11, 329–431. [Google Scholar] [CrossRef]
- Danna, E.; Rothberg, E.; Le Pape, C. Exploring relaxation induced neighborhoods to improve MIP solutions. Math. Progr. 2005, 102, 71–90. [Google Scholar] [CrossRef]
- Gambardella, L.M.; Montemanni, R.; Weyland, D. Coupling ant colony systems with strong local searches. Eur. J. Oper. Res. 2012, 220, 831–843. [Google Scholar] [CrossRef]
- Gyongyosi, L.; Imre, S. A Survey on quantum computing technology. Comput. Sci. Rev. 2019, 31, 51–71. [Google Scholar] [CrossRef]
- City of Rome-DGC136. 2016. Deliberazione Giunta Comunale n.136. Available online: https://www.comune.roma.it/web-resources/cms/documents/DGC_136_2019_Servizi_a_pagamento_Pol_Loc.pdf (accessed on 31 December 2023). (In Italian).
- D’Andreagiovanni, F.; Nardin, A.; Carrese, S. An Analysis of the Service Coverage and Regulation of E-Scooter Sharing in Rome (Italy). Transp. Res. Procedia 2022, 60, 440–447. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| ID | Lots | Places | Places (act) | v (best) | v% (best) | v (avg) | v% (avg) | t (HQ-ACO) | t (CPLEX) | t% |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 610 | 2056 | 198 | 0 | 0 | −644 | −3.7 | 2109 | 2783 | 32.0 |
| 2 | 676 | 2529 | 247 | 0 | 0 | −1365 | −5.2 | 1922 | 2468 | 28.4 |
| 3 | 761 | 2765 | 275 | 0 | 0 | −2740 | −7.8 | 2175 | 2831 | 30.2 |
| 4 | 797 | 3387 | 324 | 2081 | 6.7 | 746 | 2.4 | 2484 | 3442 | 38.6 |
| 5 | 947 | 3260 | 335 | 2234 | 5.6 | 1397 | 3.5 | 2743 | 3276 | 19.4 |
| 6 | 995 | 3609 | 355 | 3649 | 7.8 | 2012 | 4.3 | 2956 | 3489 | 18.0 |
| 7 | 1167 | 4474 | 441 | 6638 | 12.3 | 2969 | 5.5 | 2508 | 3222 | 28.5 |
| 8 | 1160 | 4651 | 466 | 6008 | 9.8 | 2453 | 4.0 | 2497 | 3305 | 32.4 |
| 9 | 1262 | 5235 | 518 | 7932 | 13.6 | 3267 | 5.6 | 2561 | 3411 | 33.2 |
| 10 | 1459 | 4713 | 445 | 5862 | 12.4 | 2979 | 6.3 | 2465 | 3260 | 32.3 |
| 11 | 1750 | 7246 | 704 | 11831 | 16.8 | 6902 | 9.8 | 2344 | 2895 | 23.5 |
| 12 | 1895 | 8803 | 866 | 12846 | 13.1 | 4609 | 4.7 | 2423 | 3277 | 35.2 |
| 13 | 2071 | 9694 | 957 | 19448 | 17.2 | 8707 | 7.7 | 2734 | 3304 | 20.8 |
| 14 | 2282 | 9689 | 978 | 23227 | 22.3 | 9895 | 9.5 | 2475 | 3197 | 29.2 |
| 15 | 2736 | 11427 | 1166 | 22226 | 18.2 | 11968 | 9.8 | 3009 | 3462 | 15.1 |
| 16 | 3030 | 15960 | 1553 | 29710 | 16.9 | 17581 | 10.0 | 2429 | 3198 | 31.7 |
| 17 | 3257 | 17034 | 1673 | 41335 | 24.3 | 19222 | 11.3 | 2363 | 3261 | 38.0 |
| 18 | 3713 | 18214 | 1787 | 35454 | 19.4 | 24123 | 13.2 | 2711 | 3367 | 24.2 |
| 19 | 3782 | 27188 | 2687 | 68996 | 25.6 | 40158 | 14.9 | 2477 | 3450 | 39.3 |
| 20 | 4354 | 33252 | 3272 | 72891 | 20.6 | 47769 | 13.5 | 2874 | 3566 | 24.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nardin, A.; D’Andreagiovanni, F. A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services. Algorithms 2024, 17, 80. https://doi.org/10.3390/a17020080
Nardin A, D’Andreagiovanni F. A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services. Algorithms. 2024; 17(2):80. https://doi.org/10.3390/a17020080
Chicago/Turabian StyleNardin, Antonella, and Fabio D’Andreagiovanni. 2024. "A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services" Algorithms 17, no. 2: 80. https://doi.org/10.3390/a17020080
APA StyleNardin, A., & D’Andreagiovanni, F. (2024). A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services. Algorithms, 17(2), 80. https://doi.org/10.3390/a17020080