
Performance-Constraint Fault Tolerant Control to Aircraft in Presence of Actuator Deviation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. A Class of Aircraft Dynamic Model Considering Actuator Deviation
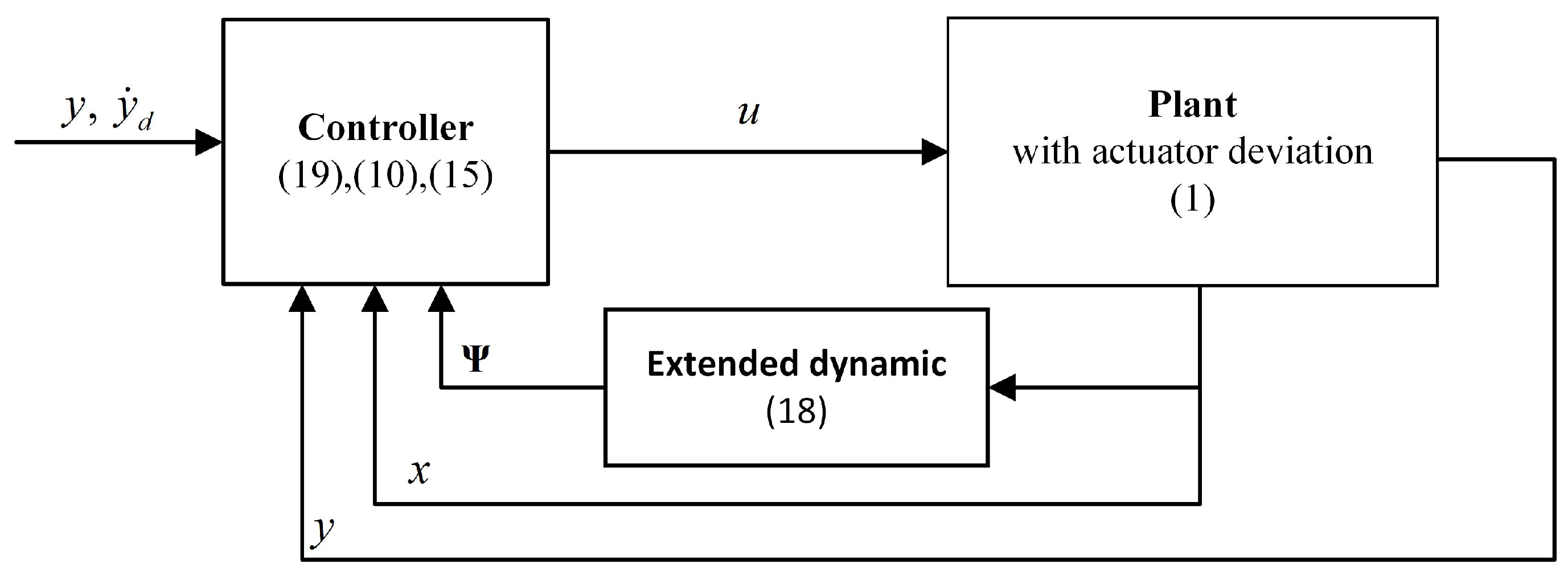
3. Unified Control Framework
4. FTC-FT Controller Applied on the Unmanned Helicopter
5. Compared Results in a Prototype
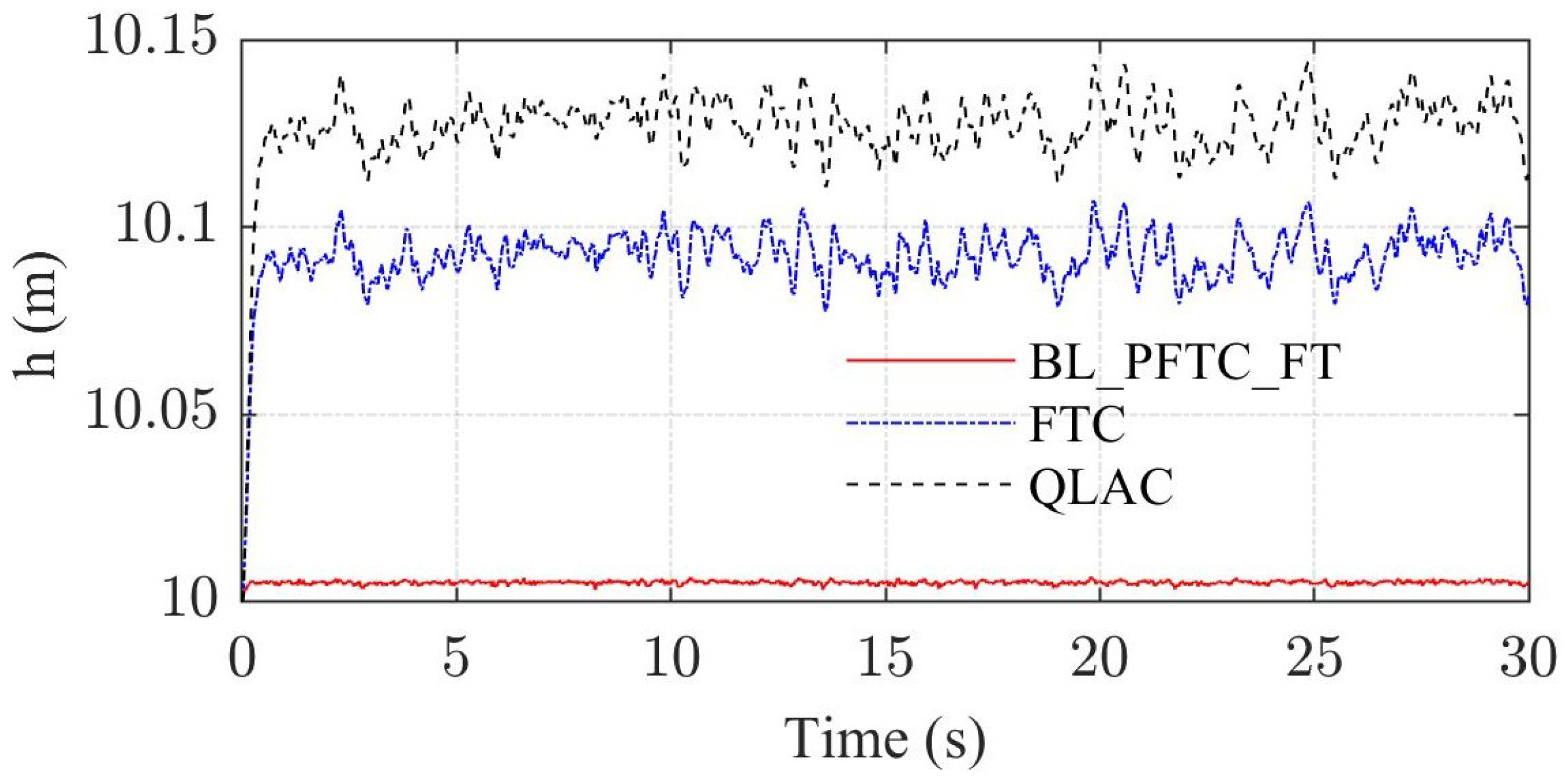
| FTC | |
| QLAC |
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yin, Z.; Hu, N.; Chen, J.; Yang, Y.; Shen, G. A review of fault diagnosis, prognosis and health management for aircraft electromechanical actuators. IET Electr. Power Appl. 2022, 16, 1249–1272. [Google Scholar] [CrossRef]
- Jung, W.; Bang, H. Fault and Failure Tolerant Model Predictive Control of Quadrotor UAV. Int. J. Aeronaut. Space Sci. 2021, 22, 663–675. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, F.; Ye, J.; Lin, D. An integral TSMC-based adaptive fault-tolerant control for quadrotor with external disturbances and parametric uncertainties. Aerosp. Sci. Technol. 2021, 109, 106415. [Google Scholar] [CrossRef]
- Sun, S.; Wang, X.; Chu, Q.; Visser, C.D. Incremental Nonlinear Fault-Tolerant Control of a Quadrotor with Complete Loss of Two Opposing Rotors. IEEE Trans. Robot. 2021, 37, 116–130. [Google Scholar] [CrossRef]
- Bounemeur, A.; Chemachema, M. Adaptive fuzzy fault-tolerant control using Nussbaum-type function with state-dependent actuator failures. Neural Comput. Appl. 2021, 33, 191–208. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Y.; Huang, T.; Chakrabarti, P. Event-triggered adaptive fault-tolerant control for a class of nonlinear multiagent systems with sensor and actuator faults. IEEE Trans. Circuits Syst. Regul. Pap. 2022, 69, 4203–4214. [Google Scholar] [CrossRef]
- Wang, G.; Xia, H. Fault-tolerant learning control of air-breathing hypersonic vehicles with uncertain parameters and actuator faults. Expert Syst. Appl. 2024, 238, 121874. [Google Scholar] [CrossRef]
- Lu, Y.; Jia, Z.; Liu, X.; Lu, K. Output feedback fault-tolerant control for hypersonic flight vehicles with non-affine actuator faults. Acta Astronaut. 2022, 193, 324–337. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Yan, X.; Mao, Z.; Polycarpou, M.M. Fault-tolerant control for systems with unmatched actuator faults and disturbances. IEEE Trans. Autom. Control 2021, 66, 1725–1732. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, K.; Jiang, B.; Wen, C. Adaptive sliding mode observer-based robust fault reconstruction for a helicopter with actuator fault. Asian J. Control 2016, 18, 1558–1565. [Google Scholar] [CrossRef]
- Ortiz-Torres, G.; Castillo, P.; Sorcia-Vázquez, F.D.; Rumbo-Morales, J.Y.; Brizuela-Mendoza, J.A.; De La Cruz-Soto, J.; Martínez-García, M. Fault estimation and fault tolerant control strategies applied to VTOL aerial vehicles with soft and aggressive actuator faults. IEEE Access 2020, 8, 10649–10661. [Google Scholar] [CrossRef]
- Chang, J.; Cieslak, J.; Guo, Z.; Henry, D. On the synthesis of a sliding-mode-observer-based adaptive fault-tolerant flight control scheme. ISA Trans. 2021, 111, 8–23. [Google Scholar] [CrossRef]
- Liu, Y.; Hong, S.; Zio, E.; Liu, J. Fault Diagnosis and Reconfigurable Control for Commercial Aircraft with Multiple Faults and Actuator Saturation. Aerospace 2021, 8, 108. [Google Scholar] [CrossRef]
- Guo, B.; Dian, S.; Zhao, T. Event-driven-observer-based fuzzy fault-tolerant control for nonlinear system with actuator fault. Nonlinear Dyn. 2022, 107, 3505–3519. [Google Scholar] [CrossRef]
- Yan, K.; Chen, M.; Wu, Q.; Lu, K. Robust attitude fault-tolerant control for unmanned autonomous helicopter with flapping dynamics and actuator faults. Trans. Inst. Meas. Control 2019, 41, 1266–1277. [Google Scholar] [CrossRef]
- Marcos, A.; Waitman, S.; Sato, M. Fault tolerant linear parameter varying flight control design, verification and validation. J. Frankl. Inst. 2022, 359, 653–676. [Google Scholar] [CrossRef]
- Quadros, M.M.; de Bessa, I.V.; Leite, V.J.; Palhares, R.M. Fault tolerant control for linear parameter varying systems: An improved robust virtual actuator and sensor approach. ISA Trans. 2020, 104, 356–369. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.; Shen, Y.; Zhang, Y. Active fault-tolerant control for a quadrotor helicopter against actuator faults and model uncertainties. Aerosp. Sci. Technol. 2020, 99, 105745. [Google Scholar] [CrossRef]
- Sun, X.; Wang, X.; Zhou, Z.; Zhou, Z. Active Fault-Tolerant Control Strategy for More Electric Aircraft under Actuation System Failure. Actuators 2020, 9, 122. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, D.; Han, L.; Gao, H.; Gao, Z.; Zhang, Y. Adaptive fault-tolerant control of a hybrid canard rotor/wing uav under transition flight subject to actuator faults and model uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4559–4574. [Google Scholar] [CrossRef]
- Zhang, N.; Gai, W.; Zhong, M.; Zhang, J. A fast finite-time convergent guidance law with nonlinear disturbance observer for unmanned aerial vehicles collision avoidance. Aerosp. Sci. Technol. 2019, 86, 204–214. [Google Scholar] [CrossRef]
- Yu, W.; Yan, J.; Pan, X.; Tan, S.; Cao, H.; Song, Y. Fault-tolerant attitude tracking control with practical finite time convergence for unmanned aerial vehicles under actuation faults. Int. J. Robust Nonlinear Control. 2022, 32, 3737–3753. [Google Scholar] [CrossRef]
- Jiang, T.; Lin, D.; Song, T. Finite-time control for small-scale unmanned helicopter with disturbances. Nonlinear Dyn. 2019, 96, 1747–1763. [Google Scholar] [CrossRef]
- Jiang, T.; Lin, D. Fast finite-time backstepping for helicopters under input constraints and perturbations. Int. J. Syst. Sci. 2020, 51, 2868–2882. [Google Scholar] [CrossRef]
- Fang, X.; Liu, F. High-order mismatched disturbance rejection control for small-scale unmanned helicopter via continuous nonsingular terminal sliding-mode approach. Int. J. Robust Nonlinear Control. 2019, 29, 935–948. [Google Scholar] [CrossRef]
- Liu, N.; Shao, X.; Yang, W.J.I.A. Integral barrier Lyapunov function based saturated dynamic surface control for vision-based quadrotors via back-stepping. IEEE Access 2018, 6, 63292–63304. [Google Scholar] [CrossRef]
- Zheng, Z.; Ruan, L.; Zhu, M. Output-constrained tracking control of an underactuated autonomous underwater vehicle with uncertainties. Ocean. Eng. 2019, 175, 241–250. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Z.; Sun, F.; He, W. Barrier Lyapunov Function Based Learning Control of Hypersonic Flight Vehicle with AOA Constraint and Actuator Faults. IEEE Trans. Cybern. 2019, 49, 1047–1057. [Google Scholar] [CrossRef]
- Ngo, K.B.; Mahony, R.; Jiang, Z.P. Integrator backstepping using barrier functions for systems with multiple state constraints. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference, Seville, Spain, 15 December 2005; pp. 8306–8312. [Google Scholar] [CrossRef]
- Li, H.; Zhao, S.; He, W.; Lu, R. Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone. Automatica 2019, 100, 99–107. [Google Scholar] [CrossRef]
- Dong, R.Q.; Wu, Y.Y.; Zhang, Y.; Wu, A.G. Adaptive Backstepping Attitude Control Law with L2 -Gain Performance for Flexible Spacecraft. Int. J. Aerosp. Eng. 2019, 2019, 6392175. [Google Scholar] [CrossRef]
- Levant, A. Higher-order sliding modes, differentiation and output-feedback control. Int. J. Control 2003, 76, 924–941. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Fang, X.; Liu, F.; Ding, Z. Robust control of unmanned helicopters with high-order mismatched disturbances via disturbance-compensation-gain construction approach. J. Frankl. Inst. 2018, 355, 7158–7177. [Google Scholar] [CrossRef]
- Johnson, E.; Mishra, S. Flight Simulation for the Development of an Experimental UAV. In Proceedings of the AIAA Modeling and Simulation Technologies Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002; p. 4975. [Google Scholar]
- Cai, G.; Chen, B.M.; Lee, T.H. Unmanned Rotorcraft Systems; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, P.; Zhao, C.; Liang, S.; Dai, Y. Performance-Constraint Fault Tolerant Control to Aircraft in Presence of Actuator Deviation. Algorithms 2024, 17, 196. https://doi.org/10.3390/a17050196
Tang P, Zhao C, Liang S, Dai Y. Performance-Constraint Fault Tolerant Control to Aircraft in Presence of Actuator Deviation. Algorithms. 2024; 17(5):196. https://doi.org/10.3390/a17050196
Chicago/Turabian StyleTang, Peng, Chuangxin Zhao, Shizhe Liang, and Yuehong Dai. 2024. "Performance-Constraint Fault Tolerant Control to Aircraft in Presence of Actuator Deviation" Algorithms 17, no. 5: 196. https://doi.org/10.3390/a17050196
APA StyleTang, P., Zhao, C., Liang, S., & Dai, Y. (2024). Performance-Constraint Fault Tolerant Control to Aircraft in Presence of Actuator Deviation. Algorithms, 17(5), 196. https://doi.org/10.3390/a17050196