
Synthesis of Circular Antenna Arrays for Achieving Lower Side Lobe Level and Higher Directivity Using Hybrid Optimization Algorithm

 ,
, 
Abstract
1. Introduction
- This CAA optimization problem is formulated to achieve three primary objectives: directing the main lobe to a desired direction, minimizing the SLLs, and maximizing the directivity of the antenna array for achieving desired radiation patterns and minimizing interference.
- A hybrid STNMRA, a nature-inspired optimization algorithm, is used to find optimal solutions to the CAA optimization problem at a low computational cost and with robustness to different problem instances.
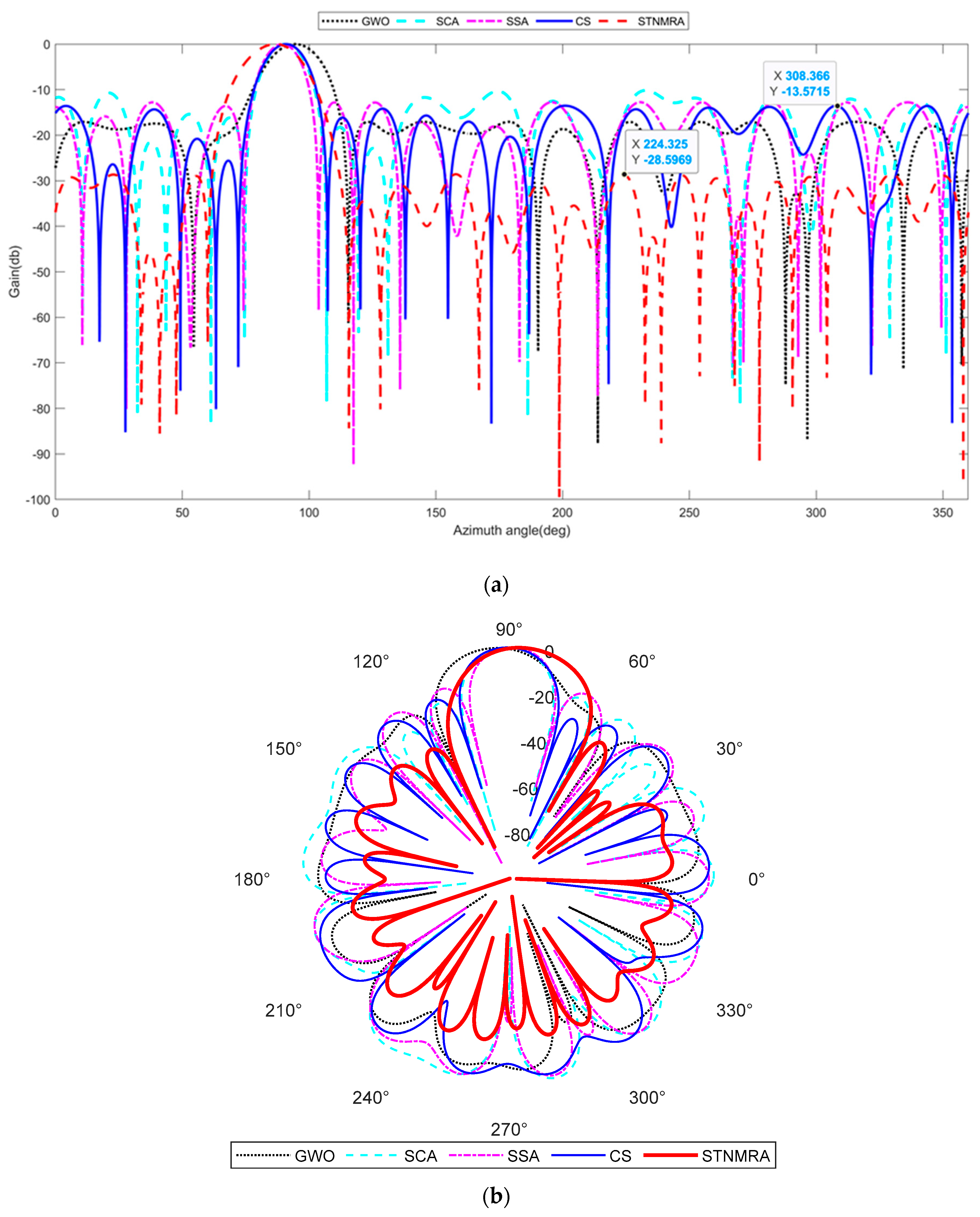
- Antenna design and optimization often require assessing the 3D radiation patterns. In this work, the results are tested in 3D to validate the desired figure of merit (typically considers parameters such as the directivity, SLLs, and beamwidth).
- The STNMRA algorithm achieves the best figure of merit, indicating that it successfully optimizes CAAs to meet the specified objectives. The optimized antenna arrays exhibit good directivity and extremely low SLLs. Additionally, the study suggests that even with a low number of antenna elements, it is possible to achieve excellent directivity while minimizing SLLs.
2. Circular Antenna Array
3. Hybrid Sooty Tern Naked Mole-Rat Algorithm (STNMRA)
3.1. Sooty Tern Optimization Algorithm (STOA)
3.1.1. Migration Action
3.1.2. Attacking Action
3.2. Naked Mole-Rat Algorithm (NMRA)
3.2.1. Initialization of Mole-Rats Population
3.2.2. Worker Phase
3.2.3. Breeder Phase
3.3. Sooty Tern NMRA (STNMRA)
3.3.1. Worker Phase
3.3.2. Breeder Phase
3.3.3. Parameter Adaptation
3.3.4. Greedy Selection
4. Simulation Results
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Balanis, C.A. Antenna Theroy: Analysis and Design; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Bera, R.; Kundu, K.; Pathak, N.N. Optimal pattern synthesis of thinned and non-uniformly excited concentric circular array antennas using hybrid GSA-PSO technique. Radioengineering 2019, 28, 369–385. [Google Scholar] [CrossRef]
- Amaireh, A.A.; Al-Zoubi, A.S.; Dib, N.I. Sidelobe-level suppression for circular antenna array via new hybrid optimization algorithm based on antlion and grass-hopper optimization algorithms. Prog. Electromagn. Res. C 2019, 93, 49–63. [Google Scholar] [CrossRef]
- Durmus, A.; Kurban, R. Optimal synthesis of concentric circular antenna arrays using political optimizer. IETE J. Res. 2022, 68, 768–777. [Google Scholar] [CrossRef]
- Wang, T.; Xia, K.-W.; Tang, H.-L.; Zhang, S.-W.; Sandrine, M. A modified wolf pack algorithm for multi-constrained sparse linear array synthesis. Int. J. Antennas Propag. 2020, 2020, 1–12. [Google Scholar] [CrossRef]
- Liu, J.; Zhao, Z.; Yang, K.; Liu, Q.H. A hybrid optimization for pattern synthesis of large antenna arrays. Prog. Electromagn. Res. 2014, 145, 81–91. [Google Scholar] [CrossRef]
- Owoola, E.O.; Xia, K.; Wang, T.; Umar, A.; Akindele, R.G. Pattern synthesis of uniform and sparse linear antenna array using may y algorithm. IEEE Access 2021, 9, 77954–77975. [Google Scholar] [CrossRef]
- Owoola, E.O.; Xia, K.; Ogunjo, S.; Mukase, S.; Mohamed, A. Advanced marine predator algorithm for circular antenna array pattern synthesis. Sensors 2022, 22, 5779. [Google Scholar] [CrossRef] [PubMed]
- Rathore, P.S.; Chatterjee, J.M.; Kumar, A.; Sujatha, R. Energy-efficient cluster head selection through relay approach for WSN. J. Supercomput. 2021, 77, 7649–7675. [Google Scholar] [CrossRef]
- Kumar, G.; Kumar, R. A survey on planar ultra-wideband antennas with band notch characteristics: Principle, design, and applications. AEU—Int. J. Electron. Commun. 2019, 109, 76–98. [Google Scholar] [CrossRef]
- Singh, H.; Abouhawwash, M.; Mittal, N.; Salgotra, R.; Mahajan, S.; Pandit, A.K. Performance evaluation of Non-Uniform circular antenna array using integrated harmony search with Differential Evolution based Naked Mole Rat algorithm. Expert Syst. Appl. 2022, 189, 116146. [Google Scholar] [CrossRef]
- Mittal, N.; Singh, S.; Nayyar, A.; Singh, U. Hybrid sooty tern naked mole-rat algorithm and Fuzzy Type-2 logic-based trust and energy-aware stable clustering protocol. Expert Syst. Appl. 2023, 219, 119706. [Google Scholar] [CrossRef]
- Salgotra, R.; Singh, U. The naked mole-rat algorithm. Neural Comput. Appl. 2019, 31, 8837–8885. [Google Scholar] [CrossRef]
- Dhiman, G.; Kaur, A. STOA: A bio-inspired based optimization algorithm for industrial engineering problems. Eng. Appl. Artif. Intell. 2019, 82, 148–174. [Google Scholar] [CrossRef]
- Singh, H.; Singh, S.; Gupta, A.; Singh, H.; Gehlot, A.; Kaur, J. Design and synthesis of circular antenna array using artificial hummingbird optimization algorithm. J. Comput. Electron. 2022, 21, 1293–1305. [Google Scholar] [CrossRef]
- Tamura, K.; Yasuda, K. The spiral optimization algorithm: Convergence conditions and settings. IEEE Trans. Syst. Man Cybern. Syst. 2017, 50, 360–375. [Google Scholar] [CrossRef]
- Al-Hassan, W.; Fayek, M.B.; Shaheen, S.I. PSOSA: An Optimized Particle Swarm Technique for Solving the Urban Planning Problem. In Proceedings of the 2006 International Conference on Computer Engineering and Systems, Cairo, Egypt, 5–7 November 2006; pp. 401–405. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters |
|---|---|
| GWO | NP = 60; D = 12; Gmax = 500; a |
| SSA | NP = 60; D = 12; Gmax = 500; |
| CS | NP = 60; D = 12; Gmax = 500; = 0.25 |
| SCA | NP = 60; D = 12; Gmax = 500; |
| STNMRA | NP = 60; D = 12; Gmax = 500; = adaptive; = adaptive |
| Hard Controlling Parameters | Algorithm | Maximum SLL [dB] | Directivity [dB] | Computational Time (s) | |||
|---|---|---|---|---|---|---|---|
| 90° | N = 12 | Uniform | [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1] | [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | −7.87 | 12.54 | 0.00 |
| GWO | [1, 0.8878, 0.2037, 0.5398, 0.2, 0.3249, 0.2, 0.5745, 0.2057, 0.7740, 0.2017, 0.8430] | [1.39, 3.75, 113.33, −57.36, −11.63, 69.67, −180, −31.4, −157.88, 11.94, 0.14, −14.23] | −15.71 | 12.88 | 0.79 | ||
| SCA | [1, 0.7402, 0.2, 0.9541, 0.2, 0.3412, 0.2, 0.6847, 0.4559, 0.8231, 0.7688, 1] | [−180, 180, −180, −180, −106.37, −88.08, 135.81, 178.76, −180, 180, −141.04, −180] | −11.37 | 13.04 | 0.74 | ||
| SSA | [1, 0.8708, 0.3265, 0.6346, 0.2053, 0.2770, 0.2231, 0.3991, 0.2073, 0.9062, 0.2733, 0.8611] | [180, −179.75, 152.03, 157.34, −121, 180, −140.18, 93.69, 29.08, −156.55, 116.9, 179.68] | −13.55 | 12.78 | 0.82 | ||
| CS | [0.9397, 0.8231, 0.2797, 0.7587, 0.2136, 0.2118, 0.2039, 0.4659, 0.2231, 0.8539, 0.4372, 0.9871] | [180, 178.51, 172.55, 140.88, −180, −116.7, −158.22, 113.17, 121.3, −159.43, 144.71, 173.48] | −13.57 | 13.18 | 0.85 | ||
| STNMRA | [0.9753, 0.3763, 0.3210, 0.3652, 0.2001, 0.2188, 0.2406, 0.2494, 0.2260, 0.4257, 0.2467, 0.8262] | [8.74, 22.96, 158.51, −95.27, −97.04, 119.1, 26.33, −71.94, −35.55, 91.91, −102.4, −29.84] | −28.59 | 12.38 | 1.18 |
| Hard Controlling Parameters | Algorithm | Maximum SLL [dB] | Directivity [dB] | Computational Time (s) | |||
|---|---|---|---|---|---|---|---|
| 90° | N = 24 | Uniform | [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1] | [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | −7.77 | 14.30 | 0.00 |
| GWO | [0.7915, 0.7354, 0.7203, 0.7527, 0.7069, 0.3326, 0.6418, 0.2048, 0.4255, 0.2534, 0.2492, 0.3253, 0.4332, 0.2541, 0.2263, 0.2052, 0.2004, 0.9505, 0.5179, 0.2007, 0.9727, 1, 0.6929, 0.3677] | [179.99, −180, −180, 129.48, 179.95, 108.24, 121.81, −9.4, 179.89, −179.99, 42.52, 56.67, −160.05, 10.27, 109.46, −120.25, −0.13, 144.98, −178.56, −167.71, 138.71, 164.91, 179.01, 178.22] | −14.30 | 15.07 | 1.39 | ||
| SCA | [1, 0.2, 0.8541, 1, 0.2, 0.2, 0.2344, 0.2559, 0.3729, 0.5079, 0.2, 0.2, 0.2550, 0.2118, 1, 0.2,0.5616, 0.2, 0.6227, 0.2029, 1, 1, 1, 1] | [−154.97, 180, −180, −180, 180, −180, 180, 180, 11.09, −180, 52.22, −71.3, −180, 180, 100.03, −37.04, −180, 173.97, −180, 106.01, 180, 180, −180, 166.49] | −9.52 | 14.57 | 1.48 | ||
| SSA | [0.7665, 0.5135, 0.8262, 0.9027, 0.9123, 0.8047, 0.2, 0.2008, 0.4671, 0.9620, 0.2862, 0.5007, 0.3917, 0.3374, 0.4158, 0.5321, 0.9590, 0.2619, 0.3310, 0.3480, 1, 0.9777, 0.9999, 0.3545] | [−164.53, 132.73, 150.41, −179.25, −156.26, −151.3, 36.66, −130.32, −169.11, 135.68, −37.6, −175.33, 121.51, −71.42, 149.44, −54.12, −176.55, 175.3, −125.65, −171.41, −174.49, 173.61, −164.68, 162.06] | −14.01 | 15.39 | 1.52 | ||
| CS | [0.7300, 0.6604, 0.9657, 0.9724, 0.7399, 0.5077, 0.9144, 0.3571, 0.3890, 0.2, 0.2070, 0.3632, 0.3101, 0.6556, 0.2003, 0.4653, 0.7108, 0.2499, 0.3996, 0.9408, 0.6948, 0.5643, 0.9990, 0.8898] | [172.42, 154.56, 155.62, −176.1, −171.8, 158.59, 180, 179.91, −178.07, 158.54, −56.55, −87.54, 58.72, 172.63, 96.69, −147.2, −176.27, −109.73, 169.72, −177.32, 180, 173.55, −165.89, −127.67] | −12.92 | 15.57 | 1.63 | ||
| STNMRA | [0.8038, 0.5463, 0.7782, 0.9988, 0.8199, 0.5903, 0.5693, 0.2004, 0.5394, 0.3730, 0.5418, 0.7236, 0.2024, 0.6437, 0.2615, 0.4811, 0.7154, 0.2946, 0.6476, 0.5123, 0.9839, 0.9980, 0.9618, 0.8926] | [4.04, −8.58, −24.08, −24.15, 3.43, −48.97, −2.98, −16.77, 43.18, −67.01, −171.4, 39.96, −169.25, −76.64, 119.89, 85.65, −41.59, 119.26, 5.59, 133.35, −48.01, 20.81, 46.93, 36.95] | −16.37 | 15.61 | 2.08 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mittal, V.; Sharma, K.P.; Thangarasu, N.; Sarat, U.; Hourani, A.O.; Salgotra, R. Synthesis of Circular Antenna Arrays for Achieving Lower Side Lobe Level and Higher Directivity Using Hybrid Optimization Algorithm. Algorithms 2024, 17, 256. https://doi.org/10.3390/a17060256
Mittal V, Sharma KP, Thangarasu N, Sarat U, Hourani AO, Salgotra R. Synthesis of Circular Antenna Arrays for Achieving Lower Side Lobe Level and Higher Directivity Using Hybrid Optimization Algorithm. Algorithms. 2024; 17(6):256. https://doi.org/10.3390/a17060256
Chicago/Turabian StyleMittal, Vikas, Kanta Prasad Sharma, Narmadha Thangarasu, Udandarao Sarat, Ahmad O. Hourani, and Rohit Salgotra. 2024. "Synthesis of Circular Antenna Arrays for Achieving Lower Side Lobe Level and Higher Directivity Using Hybrid Optimization Algorithm" Algorithms 17, no. 6: 256. https://doi.org/10.3390/a17060256
APA StyleMittal, V., Sharma, K. P., Thangarasu, N., Sarat, U., Hourani, A. O., & Salgotra, R. (2024). Synthesis of Circular Antenna Arrays for Achieving Lower Side Lobe Level and Higher Directivity Using Hybrid Optimization Algorithm. Algorithms, 17(6), 256. https://doi.org/10.3390/a17060256