



Load Frequency Optimal Active Disturbance Rejection Control of Hybrid Power System
Abstract
1. Introduction
2. Dynamic Model of Load Frequency Control
2.1. Multi-Area Interconnected Power System
2.2. Load Frequency Control Model
2.3. Linearized Models for LFC Components
3. The Proposed Control Strategy
3.1. The Principle and Control Algorithm of ADRC
3.2. Linear Quadratic Regulator
4. Experimental Results and Analysis
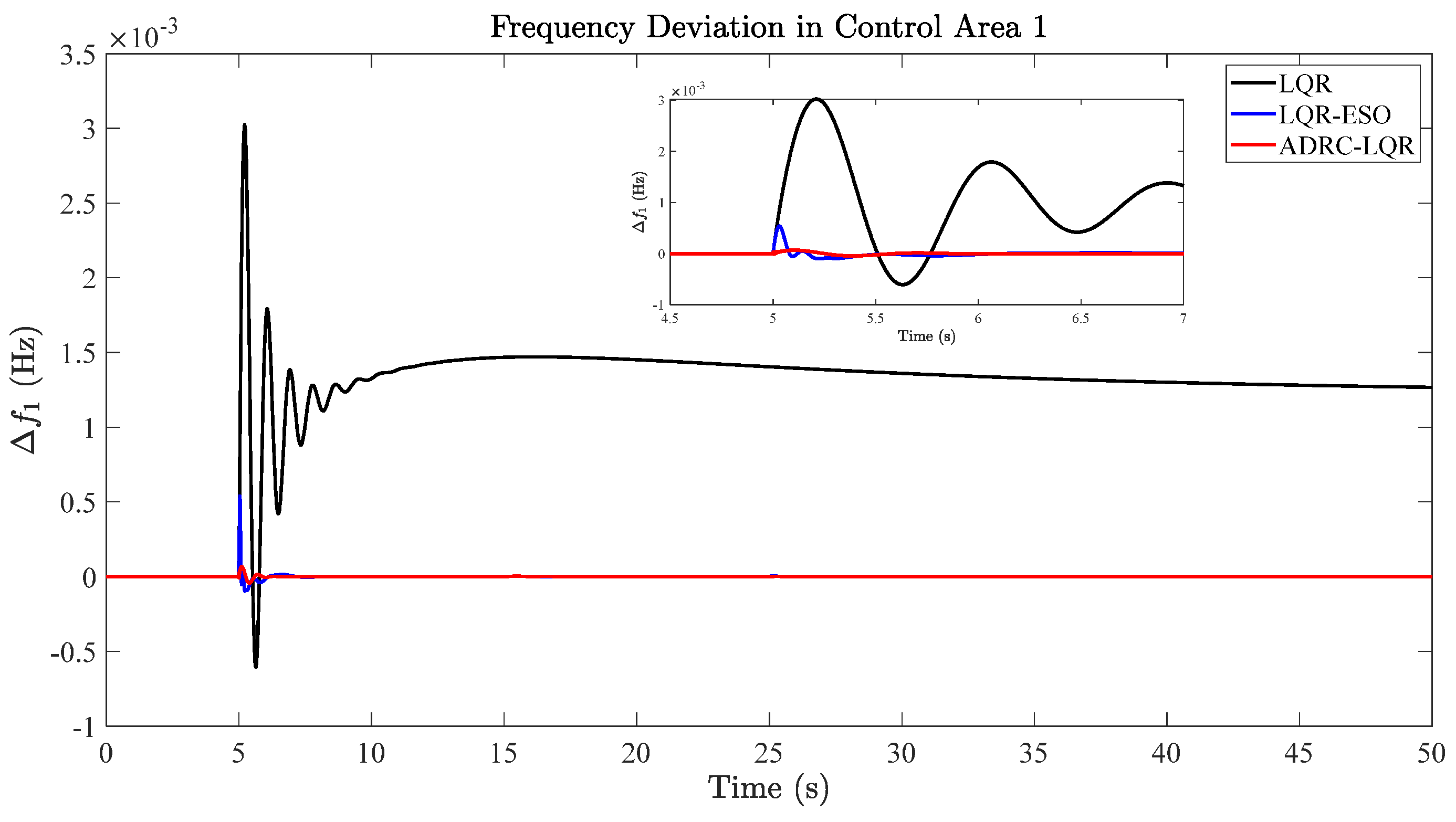
4.1. The Step-Load Disturbance
4.2. Random Disturbance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cui, M.; Zhao, Y.; Cao, P.; Tang, Y.; Lu, Y. Load frequency control of interconnected hydrothermal power system based on FOPI + FOPD controller. Int. J. Dyn. Control 2024, 12, 1073–1085. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H. Complete provision of MPC-based LFC by electric vehicles with inertial and droop support from DFIG-based wind farm. IEEE Trans. Power Deliv. 2022, 37, 716–726. [Google Scholar] [CrossRef]
- Marayati, M.; Farrukh, N.; Navinesshani, P.; Agileswari, A.; Aidil, A. Takagi-sugeno type 1–2 fuzzy linear output controller for two-area load frequency control. Syst. Soft Comput. 2024, 6, 200083. [Google Scholar]
- Li, X.; Ye, D. Event-based Distributed Fuzzy Load Frequency Control for Multi Area Nonlinear Power Systems with Switching Topology. IEEE Trans. Fuzzy Syst. 2022, 30, 4262–4272. [Google Scholar] [CrossRef]
- Vafamand, N.; Arefi, M.; Asemani, M.; Dragicevic, T. Decentralized Robust Disturbance-observer Based LFC of Interconnected Systems. IEEE Trans. Ind. Electron. 2022, 69, 4814–4823. [Google Scholar] [CrossRef]
- Wang, X.; Ding, D.; Dong, H.; Yi, X. PI-based Security Control Against Joint Sensor and Controller Attacks and Applications in Load Frequency Control. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 970–980. [Google Scholar] [CrossRef]
- Silani, A.; Cucuzzella, M.; Scherpen, J. Output Regulation for Load Frequency Control. IEEE Trans. Control Syst. Technol. 2022, 30, 1130–1144. [Google Scholar] [CrossRef]
- Khan, I.; Mokhli, H.; Mansor, N.; Illias, H.; Awalin, L.; Wang, L. New trends and future directions in load frequency control and flexible power system: A comprehensive review. Alex. Eng. J. 2023, 71, 263–308. [Google Scholar] [CrossRef]
- Lin, C.; Hu, B.; Shao, C. Event-triggered Load Frequency Control Based on Age-of-information. IEEE Trans. Power Syst. 2023, 38, 2348–2361. [Google Scholar] [CrossRef]
- Sari, A.; Sönmez, Ş.; Ayasun, S.; Kabalci, Y. Delay-dependent stability analysis of multi-area LFC-EVs system. IEEE Trans. Smart Grid 2023, 14, 2178–2188. [Google Scholar] [CrossRef]
- Daraz, A.; Malik, S.; Haq, I.; Khan, K.; Laghari, G.; Zafar, F. Modified PID controller for automatic generation control of multi-source interconnected power system using fitness dependent optimizer algorithm. PLoS ONE 2020, 15, 24–28. [Google Scholar] [CrossRef]
- Elkasem, A.; Khamies, M.; Hassan, M.; Agwa, A.; Kamel, S. Optimal design of TD-TI controller for LFC considering renewables penetration by an improved chaos game optimizer. Fractal Fract. 2022, 6, 220. [Google Scholar] [CrossRef]
- Mu, C.; Tang, Y.; He, H. Improved sliding mode design for load frequency control of power system integrated an adaptive learning strategy. IEEE Trans. Ind. Electron. 2017, 64, 6742–6751. [Google Scholar] [CrossRef]
- Han, J. Auto disturbance rejection controller and it’s applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Zheng, Y.; Chen, Z.; Huang, Z.; Sun, M.; Sun, Q. Load frequency control of three-area interconnected power systems based on reduced-order active disturbance rejection controller. In Proceedings of the 2020 IEEE 9th Data Driven Control and Learning Systems Conference (DDCLS), Liuzhou, China, 20–22 November 2020; pp. 6–11. [Google Scholar]
- Chen, Z.; Zhu, J.; Li, S. Detection of False Data Injection Attacks on Load Frequency Control System with Renewable Energy Based on Fuzzy Logic and Neural Networks. J. Mod. Power Syst. Clean Energy 2022, 10, 1576–1587. [Google Scholar] [CrossRef]
- Muhammad, M.; Muhammad, I.; Sulman, S.; Hafiz, A.; Muhammad, S.; Muhammad, M. Load Frequency Control (LFC) Strategies in Renewable Energy-Based Hybrid Power Systems: A Review. Energies 2022, 15, 3488. [Google Scholar] [CrossRef]
- Campos-Peña, P.A.; Aliaga-Yauri, J.O.; Barrera-Esparta, D.L.; Gómez-Casasola, M.R. Performance comparison between LQR, GPC and ANFIS controllers for load frequency control in a small hydro power plant. In Proceedings of the 2022 IEEE International Conference on Automation/XXV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Curicó, Chile, 24–28 October 2022; pp. 1–6. [Google Scholar]
- Dorado-Rojas, S.A.; Cortés-Romero, J.; Rivera, S.; Mojica-Nava, E. ADRC for Decentralized Load Frequency Control with Renewable Energy Generation. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar]
- Taghizadegan, N.; Babaei, F.; Safari, A. A linear active disturbance rejection control technique for frequency control of networked microgrids. Energy Syst 2024, 15, 807–826. [Google Scholar] [CrossRef]
- Liu, X.; Wang, C.; Kong, X.; Zhang, Y.; Wang, W.; Lee, K. Tube-based distributed MPC for load frequency control of power system with high wind power penetration. IEEE Trans. Power Syst. 2023, 39, 3118–3129. [Google Scholar] [CrossRef]
- Ozay, C.; Mustafa, S. Gorilla troops optimization-based load frequency control in PV thermal power system. Neural Comput. Appl. 2024, 36, 4179–4193. [Google Scholar]
- Ahmed, T.; Fahd, A.; Mohamed, M.; Mohamed, I.; Asmaa, F.; Mohamed, R.; Mahmoud, M.; Tarek, H. Adaptive Load Frequency Control in Microgrids Considering PV Sources and EVs Impacts: Applications of Hybrid Sine Cosine Optimizer and Balloon Effect Identifier Algorithms. Int. J. Robot. Control Syst. 2024, 4, 941–957. [Google Scholar]
- Wang, Q.; Lim, I.; Ye, Z.; Nie, Z. LQR approach to robust stabilization of state space systems with matched uncertainties. ISA Trans. 2023, 142, 420–426. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Nie, Z.; Shao, H.; Fang, H.; Luo, J. Active disturbance rejection control for non-minimum phase systems under plant reconstruction. ISA Trans. 2023, 134, 497–510. [Google Scholar] [CrossRef] [PubMed]
- Vedik, G.; Kumar, B.; Deshmukh, R.; Verma, R.; Shiva, C. Renewable energy-based load frequency stabilization of interconnected power systems using quasi-oppositional dragonfly algorithm. J. Control Autom. Electr. Syst. 2021, 32, 227–243. [Google Scholar] [CrossRef]
- Gündeş, A.; LKabuli, A. Load frequency control of multiarea interconnected power systems with time delays. IEEE Trans. Control Netw. Syst. 2022, 9, 625–634. [Google Scholar] [CrossRef]
- Fu, C.; Cai, F.; Wen, T. Decentralised load frequency control for power systems with communication delays via active disturbance rejection. IET Gener. Transm. Distrib. 2018, 12, 1397–1403. [Google Scholar] [CrossRef]
- Abdullahi, B. Hierarchical bi-level load frequency control for multi-area interconnected power systems. Int. J. Electr. Power Energy Syst. 2024, 155, 109600. [Google Scholar]
- Yin, X.; She, J.; Liu, Z.; Xiong, Y. Disturbance suppression and system design based on parallel-equivalent-input disturbance approach. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3654–3665. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameter | Value |
|---|---|---|
| PVG Gain | Kpv | 1 |
| Time constant of PVG | Tpv | 1.8 |
| Pitch actuator gain | KP1 | 1.25 |
| Time constant of WTG | TP1 | 6.0 |
| TP2 | 0.041 | |
| Blade characteristic | KPC | 0.80 |
| Droop of each WTG unit | Rω | 0.024 |
| Load damping coefficient | Di | 2.0 |
| Synchronizing torque coefficient | T12 | 2.5 |
| T13 | 5.0 | |
| T23 | 3.8 |
| Parameter | Value |
|---|---|
| αG1 | 0.52 |
| αG2 | 0.12 |
| αG3 | 0.12 |
| αWT1 | 0.12 |
| αPV1 | 0.12 |
| Parameter | Value |
|---|---|
| αG4 | 0.52 |
| αG5 | 0.1 |
| αG6 | 0.1 |
| αG7 | 0.1 |
| αPV2 | 0.18 |
| Parameter | Value |
|---|---|
| αG8 | 0.12 |
| αG9 | 0.52 |
| αG10 | 0.12 |
| αWT3 | 0.12 |
| αPV3 | 0.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, K.; Wang, Y.; Liu, B.; Zhang, Z. Load Frequency Optimal Active Disturbance Rejection Control of Hybrid Power System. Algorithms 2024, 17, 403. https://doi.org/10.3390/a17090403
Zou K, Wang Y, Liu B, Zhang Z. Load Frequency Optimal Active Disturbance Rejection Control of Hybrid Power System. Algorithms. 2024; 17(9):403. https://doi.org/10.3390/a17090403
Chicago/Turabian StyleZou, Kuansheng, Yue Wang, Baowei Liu, and Zhaojun Zhang. 2024. "Load Frequency Optimal Active Disturbance Rejection Control of Hybrid Power System" Algorithms 17, no. 9: 403. https://doi.org/10.3390/a17090403
APA StyleZou, K., Wang, Y., Liu, B., & Zhang, Z. (2024). Load Frequency Optimal Active Disturbance Rejection Control of Hybrid Power System. Algorithms, 17(9), 403. https://doi.org/10.3390/a17090403