1. Introduction
This paper presents a survey of routing protocols, based on ant-like mobile agents, which are intensively used in Mobile
Ad Hoc Networks (MANET). MANET is a network that consists of wireless mobile nodes such as PDAs, laptop computers, and smart phones [
1]. They have wireless communication capability that dynamically form a temporary network without using any existing network infrastructure such as wireless access points connected to a wired network. The only infrastructure in MANET is comprised of the independent wireless communication interfaces on the devices. In such a circumstance, since the system lacks infrastructure such as routers, if some of the wireless devices are not within wireless range of each other, then multi-hop routing of data communication is necessary for messages to reach their final destination. A node that wants to start communication with other nodes that are not within its one-hop wireless transmission range has to request intermediate nodes to forward their communication packets to the destination. MANET is used in various applications including sensor networks and rescue and guidance systems in disaster situations [
2,
3,
4].
Current routing protocols have certain intrinsic shortcomings. Since proactive routing policies such as Destination Sequenced Distance Vector Routing (DSDV) continuously updates the routing tables, they tend to waste network resources just for exchanging large amounts of routing table data [
5]. It can be a serious problem because the network resources in MANET are assumed not to be robust. Too much internal activity may restrict the capability to transmit communication data for the actual users. On the other hand, reactive routing protocols such as Dynamic Source Routing Protocol (DSR) performs the route discovering procedures upon transmitting demands and may produce unacceptable delays in establishing the forwarding route [
6]. In order to ameliorate such disadvantage in reactive routing protocol,
Ad Hoc On Demand Distance Vector (AODV) was proposed as a result of integrating favorable features in DSDV into DSR [
7].
Ant-like mobile software agents, which are analogous to the ones used in the Ant Colony Optimization (ACO) framework, are employed for discovering network topologies and thus efficient routing in the networks [
8,
9,
10,
11,
12]. Ant-like mobile agents are an effective means to discover the network topology in particular in circumstances such as MANET in which the network topology frequently changes [
9]. Unlike a proactive routing protocol, routing based on ant-like agents does not require frequent exchanges of update messages for routing tables. As the population of the network becomes dense, an ant-like agent becomes more effective for load balancing in the network. Ant-like agents are a known means to mitigate congestion [
13].
3. Ant Colony Optimization
Ant-like mobile agents demonstrate their usefulness for solving some combinatorial optimization problems such as the travelling salesman problem [
15]. The idea that network control software can use ant-like mobile agents to control communication network was introduced in late 1990s [
13,
16]. Today, various control methods based on ant-like mobile agents have been proposed for telecommunication networks [
17,
18]. The use of ant-like mobile agents for routing protocol was inspired by the fact that social insects like ants have a remarkable ability to solve complex problems in a distributed way. There is no central command. Individual insects act based on their local information, yet overall coordination is accomplished. Ants communicate with each other through an indirect method called stigmergy. Each ant lays down a special chemical substance in its environment that is read by other ants to identify it as having been at a given location. This feature has often been reproduced in ant-like mobile agent algorithms. However, social insect society also has the ability to recover from individual members’ erroneous behaviors or deaths. This ability needs to be included into our artificial ant-like mechanisms. Deneubourg and Beckers demonstrated that ant-like agents can successfully solve complex problems and self-organize [
19,
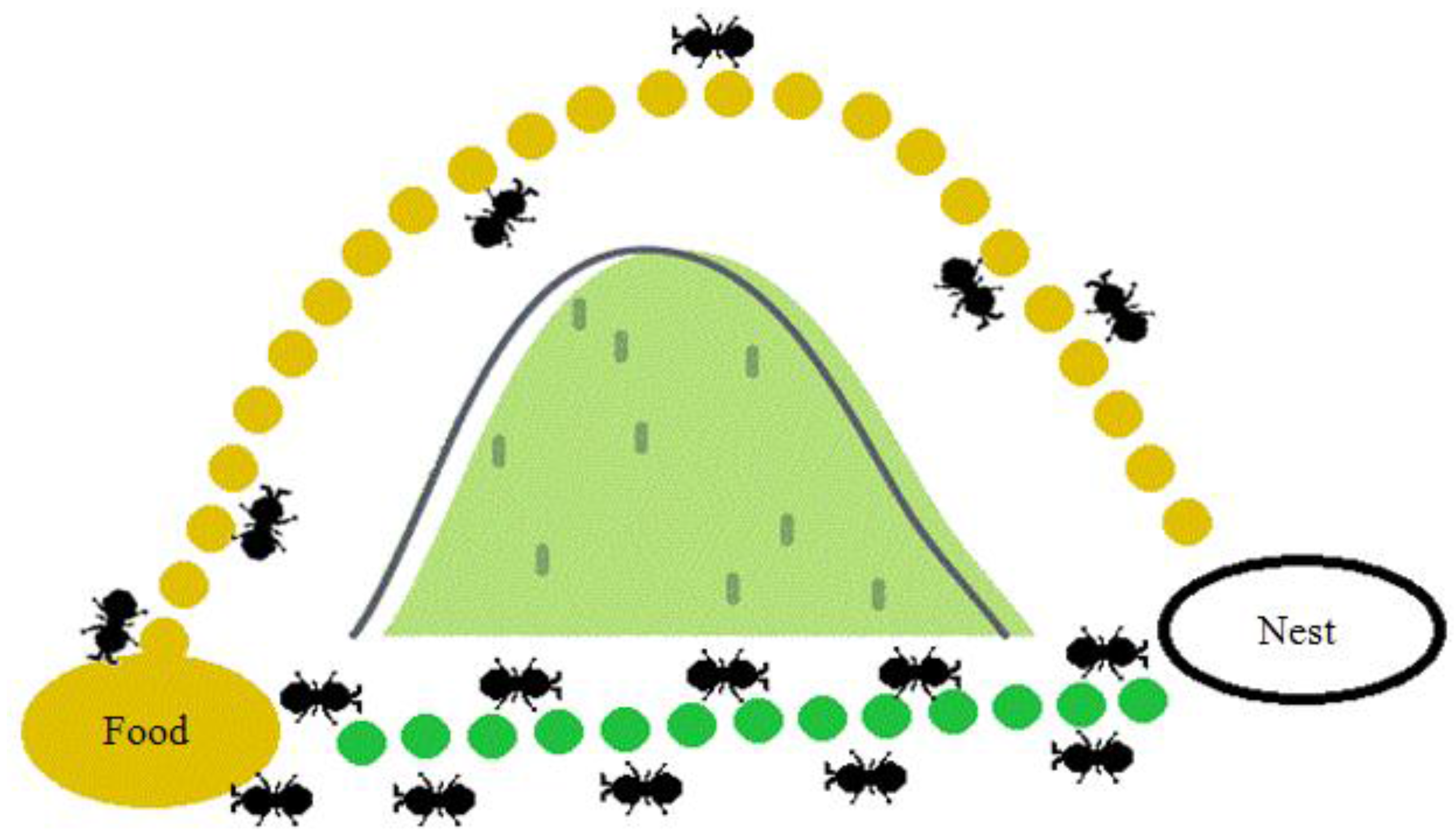
20]. For example if there are several routes from the nest of ants to a food source, the ants may find some of them as shown in
Figure 2. Every time the ants convey food from the source to the nest, they deposit pheromone so that the newly recruited ants can follow. When the ants deposit pheromone faster than it evaporates, the pheromone starts to accumulate. The more the ants follow a given path, the more the pheromone trail is strengthened. The ants may take the longer path as well as the shorter path. However, over time, the shortest route will accumulate greater pheromone density and it will attract more fellow ants. Such positive feedback works. Therefore, even though the ants find the shortest path later than longer ones, the shortest path eventually dominates. Deneubourg, Beckers, and other biologists, as well as computer scientists naturally derive the engineering application from this observation.
Figure 2.
Ants take shorter path after initial search phase.
Figure 2.
Ants take shorter path after initial search phase.
For example, consider solving the traveling salesman problem (TSP) using the artificial ant colony approach. Each ant builds a solution by using two types of information locally accessible: (1) problem-specific information,
i.e., distance among cities, and (2) information added by ants, as pheromone values, during previous iterations of the algorithm. While building a solution, each ant collects information on the problem characteristics and on its own performance, and uses this information to modify the representation of the problem. The modified representation is the new environment shared by all the ants and seen locally by other ants. The representation of the problem is modified in such a way that information contained in past good solutions can be exploited to build new better solutions. This form of indirect communication mediated by the environment is called
stigmergy, and is typical of social insects [
21,
22,
23,
24].
Suppose an ant
k (in
m ants) is at city
i, and
Nk is the set of
k’s unvisited cities. Then, the ant chooses city
j to visit next in a probabilistic way as follows:
here,
η(
i,
j) represents the problem-specific information, and in TSP, it is the reciprocal of the distance between two cities
i and
j.
α and
β are non-negative constants, and their values are determined by whether one attaches importance to global information or local information.
τ(
i,
j) represents the information added by ants,
i.e., the pheromone value on the route between two cities
i and
j. This value is updated in the following rules, when one iteration is done.
here,
Tk represents the set of all routes from the start city to the goal city, and
Lk represents the collective distance from the start city to the goal city. In ant-colony algorithms, the pheromone value added to a specific route is determined by the reciprocal of the total distance and the pheromone also disappears over time, where
ρ represents the evaporation rate so that newly added pheromone has more influence than old pheromone additions. Thus, after many of iterations, one can expect to obtain quasi-optimal route selection for a traveling salesman.
4. Routing Protocols Using Ant-Like Mobile Agents
There are many network routing applications using ant-like mobile agents. The ant-like agents are rather simple ones, moving from one node to another to collect connectivity information, and update the routing table at the each node.
In network routing applications such as [
9,
16], ant agents accumulate the information about the connectivity of the nodes in the network, and each time they visit a new node, they update the routing table based on the accumulated information. The volume of the information is not necessarily huge. The more they accumulate, the more the overhead they have to handle. A balanced design between information and overhead is important. All the nodes in the network depend on the information provided by the ant-like agents, and they do not seek its own route finding activity. In this section, we discuss several routing algorithms that use ant-like agents.
4.1. AntNet
AntNet uses two types of ant-like agents for routing in the communication networks. They are the
forward ant and the
backward ant [
25,
26,
27]. AntNet uses the
forward ants to explore the network topology proactively. Each network node launches ant-like agents,
i.e., the
forward ants, asynchronously toward randomly selected destination nodes. This happens concurrently with the data traffic at regular intervals. Each agent searches for a minimum cost path joining the source node and the destination node. While moving, the ant-like agents collect information about the time length and the congestion status of the followed paths. When the agents arrive at the destination node, they create the other ant-like agent,
i.e., the
backward ants, and make them go back to their source nodes through the same paths as they come but in the opposite direction to reflect the traffic statistics that the
forward ants collected. During the backward travel, the ant-like agents update the routing tables in the nodes along the paths with information they have collected during the travel. Thus, they adaptively build routing tables [
25,
26,
27]. Di Caro
et al. successfully showed the ability of artificial ants to optimize the network configuration. By using two different types of ant-like agents,
i.e., the
forward ant and the
backward ant, each node in the network has shortest path to all the destinations. However, they cause extra overhead and reduce the available traffic capacity for actual data communication. AntNet is an algorithm for traffic adaptive routing for multiple paths in wired IP networks. The effectiveness of this algorithm is demonstrated in the work of Schoonderwoerd
et al. [
28,
29]. They have applied the algorithm for relatively static telephone networks, and the effectiveness in a network that dynamically changes its topology, such as MANET, may be limited.
Since the main purpose of AntNet is to investigate how data packets travel along a certain route, the
forward ants and data packets share the same queue in the intermediate nodes. Thus the
forward ants can measure the estimated travelling time that the actual data packets would experience. The problem, however, is that the
forward ants may take a significantly lengthy travelling time to reach their destinations. In order to mitigate this problem, Di Caro
et al. developed an improved AntNet, AntNet-FA. In AntNet-FA,
forward ants also use high-priority queues in order to try to reduce the travelling time to their destinations [
30]. As
backward ants simply update the routing tables at the intermediate nodes based on the
forward ants’ experience, they need not measure anything, and they use high-priority queues in both AntNet and AntNet-FA. The
forward ants in AntNet-FA estimate the virtual trip time based on the properties of the link such as bandwidth and propagation delay, instead of measuring actual trip time. AntNet-FA has improved AntNet with respect to efficiency, but it does not help it adapt to dynamically changing networks such as MANET.
4.2. AntHocNet
In a MANET, nodes are mobile and therefore enter and leave the network frequently. It is not reasonable or useful to maintain a complete description of the network. In order to cope with such situations in MANET, the same research group of AntNet has developed an algorithm that builds and maintains routing tables reactively with some proactive actions to refresh the routing information. In a sense, AntHocNet can be seen as the MANET version of AntNet-FA. AntHocNet is a routing algorithm that pursues multiple paths simultaneously [
31,
32,
33,
34]. As in AntNet and AntNet-FA, ant-like agents roam in the network seeking routing information; however they are dispatched reactively when a source node wants to start communication with the destination node. The quality of a path is quantified as the inverse of the cost that is the number of hops travelling from the source to the destination, and it is expressed as the pheromone value. When a source node wishes to start a communication session to a destination node, the source node checks whether there is a route from the source to the destination. When there is one, the source node simply uses it; when there is not, the source node must discover a route to the destination. The source node creates an ant-like agent called
reactive forward ant, to explore the network to seek the route. The
reactive forward ant collects the route information as well as looking for the route. When an ant agent reaches the destination node, it becomes the
backward ant, and travels back to the source node. Along the path, the
backward ant updates the routing tables based on the route information collected by the
reactive forward ant. Data packets are probabilistically distributed into several paths. This is accomplished by probabilistically selecting next node to transmit based on the pheromone value at each intermediate node.
Even the transmission route is established from the source node to the destination node and the data communication session started, the source node does not remain passive. It creates other ant-like agents called proactive forward ants and distributes them into the network. These proactive forward ants move from node to node based on the pheromone value, and monitor the quality of the route. From time to time, an intermediate node broadcasts additional proactive forward ants to explore new routes to the destination.
There are a few improvement proposals to AntHocNet. A notable one is Fuzzy Logic Ant Based Routing (FLAR) proposed by Mirabedini
et al. [
35]. FLAR has integrated fuzzy logic into AntHocNet. In MANET environments, route failure management is a challenge because of the node mobility and rather narrow bandwidth. Mirabedini
et al. have proposed an adaptive fuzzy ant-based routing algorithm that combines ACO and the fuzzy logic technique to cope with the route failure problem. A similar proposal can be found in [
36]. They have compared average end-to-end delay and packet delivery ration with AntHocNet, and have shown the effectiveness of the integration of fuzzy logic to ACO.
4.3. Ant-Colony Based Routing Algorithm (ARA)
One of the representative reactive routing algorithms based on ant-like mobile agents is Ant-Colony Based Routing Algorithm (ARA) [
37]. ARA is a purely reactive MANET routing algorithm. One of its notable characteristics is that it does not use the
hello packet to explicitly find its neighbors [
38]. Instead, ARA uses a flooding technique. The source node in a MANET that employs this algorithm broadcast
forward ants toward the destination. As each
forward ant moves toward the destination, it constructs a route from the visited node to the source node. In ARA, a route is indicated by a positive pheromone value in the intermediate nodes’ routing tables. When the
forward ant reaches the destination, it creates the
backward ant and sends it back to the source node in order to construct there the correct forward route. Since the all
forward ants that share the same destination from the same source node also share the same sequence number, redundant ants returning via inferior routes are simply discarded. Superiority and inferiority are determined by the pheromone values that are computed based on the number of hops of the route.
As in AntHocNet, the quality of a path is managed by a pheromone value, but it is maintained by data packets instead of ant-like agents. Each time an intermediate node relays a data packet along a certain path, the corresponding pheromone value is increased. As the pheromone evaporates, the less utilized route has less pheromone value and does not attract data packets.
When an intermediate node leaves from a route while the route is still used in a communication session, the node that failed to relay data sends an error message to the previous node. On receiving the route failure message, the previous node checks whether there is an alternate route to the destination. If there is one, the previous node simply uses it; if there is not, the previous node asks neighbors to relay the data packet. If the failure notification reaches to the source node, it re-initiates the broadcast of the forward ants.
Gunes
et al. have demonstrated the effectiveness of ARA over AODV [
39]. They have shown that the higher the mobility of the participating nodes in the network, the greater the effectiveness of ARA. Arif
et al. have improved ARA in order to cope with much higher mobility situations. They propose an improved algorithm called Enhanced Ant Colony Based Routing Algorithm (EARA) [
40]. In ARA, the pheromone values are computed by the number of hops, and delay time is not taken into consideration. In EARA, the initial pheromone value is set by not only the total number of hops made by the
forward ant that pursued the route, but also by taking account of the time interval between the sending of the
forward ant and receiving the
backward ant. The inclusion of time period in calculating pheromone values creates a pheromone gradient from the source node to the destination node where only hop count produces similar gradients for entire route. This difference creates the higher delivery ratio [
40]. Cauvery
et al. have also improved ARA by handling loss of ants and avoiding re-transmission of lost packets by reserving resources at intermediate nodes [
41].
Woo
et al. have proposed a routing protocol for MANET similar to ARA [
42]. In the protocol, the source node establishes the route by using reactive ant-like agents. After establishment, it creates
proactive ants and sends them to explore the network in order to discover better routes. When an intermediate node has multiple routes to the destination, it selects the transmission path probabilistically and send data packet along it. This yields better balance of data traffic. If an intermediate node finds routing failure, the intermediate node creates reactive ant agents and dispatches them toward the destination.
4.4. Mobile Agent Routing (MAR)
Zhou and Zincir-Heywood proposed an algorithm called Mobile Agent Routing (MAR) [
43]. In MAR, each data packet is considered as an agent that explores the network to collect routing information. Like ARA, MAR protocol has a certain number of ant-like agents, and they constantly explore the network to collect the routing information [
43]. The ant agent of MAR has a history list with fixed length. The list contains the intermediate nodes the ant agent has visited. When the ant agent arrives at a node, the node looks at the history list, and if it finds better routing information than one in its own routing table, the node copies the information from the list to the routing table. If the node has better information than one in the history list of the ant agent, it also copies it to the history list of the ant agent. Then the node lets the ant agent move to a randomly selected neighbor node. If the nodes in the network come and leave frequently, the number of ant agents is increased. When the network becomes stable, the number of ant agent is decreased. In order to assess the stability of the network, each node sends
hello messages to its neighbors. If the node finds no reply from a certain node, it regards the node as having left the network, and deletes its entry from the routing table.
4.5. Probabilistic Emergent Routing Algorithm (PERA)
Probabilistic Emergent Routing Algorithm (PERA) uses three types of ant-like mobile agents [
44]. They are the
forward ant, the
uniform ant, and the
backward ant. Each node periodically creates
forward ants, and sends them to randomly selected destinations in the network. Each intermediate node transmits the forward ants to the next node towards the destination based on the probability of reaching the destination. Since the next node is selected from the entries in the routing table in the intermediate node, this method fails to find new routes. In order to promote the adaptability of the algorithm, the participating nodes create the
uniform ants and send them to explore the network. The
uniform ants are transmitted to the neighbor nodes with uniform probabilities. The number of
uniform ants is much smaller than the
forward ants.
When the forward ant or the uniform ant reaches the destination, the backward ant is created and transmitted to the source node. The forward ant or the uniform ant hands the history list to the backward ant so that the backward ant can trace the route the forward ant or the uniform ant came along. While following the route, the backward ant updates the routing tables of the intermediate nodes based on the information in the history list.
4.6. GPS/Ant-Like Routing in Ad Hoc Networks (GPSAL)
This routing algorithm, GPS/Ant-Like Routing in
Ad Hoc Networks (GPSAL), assumes all the mobile nodes participating in the network possess GPS (Global Positioning System) capability [
45]. In the routing table of each node in the network, the participating nodes are listed with the current positions and time stamps. The table also shows whether a certain node is mobile or not. When a new comer wishes to take part in the network, it listens to the wireless data to find a member. On discovery, it sends its own routing table to the node and asks to be registered. The route from the source node to the destination is found by a shortest path algorithm based on the physical locations. The routing information in the intermediate node is copied to the data packet with time stamps. If a node does not have the route to its destination, it asks the closest non-mobile node to forward its request for a route to the destination.
Ant-like agents are used to update the routing tables of the network. They do this proactively. Similar to the other ant-based algorithms, they are sent to randomly selected destination nodes. When a node receives the ant agent, it compare the routing information in the ant agent with the one in the routing table, and copies the better information to the routing table as well as the history list of the ant agent. To explore the network, the ant agents select their next hop from the oldest entries in the routing table or the physically farthest nodes in the network. Once the ant agent arrives at the destination, it is made return to its origin.
4.7. Ant-AODV
In order to ameliorate the dilemma between proactive routing protocols and reactive routing protocols, it is natural to conceive of AODV routing protocol that does not consume network resources as DSDV does but integrate proactive ant-like mobile agents. Marwaha
et al. have proposed such routing protocol called Ant-AODV hybrid routing protocol [
46]. As the base protocol is an on-demand type, when the source node does not have the route information to the destination, it starts an on-demand route discovery procedure. It provides, however, proactive mobile agents, and they update the routing tables of participating nodes so that they decrease the frequency of the on-demand route discoveries. In such a compromise, it is most important to discover the appropriate parameters based on intensive simulations reflecting the real situation. In real world, constructing a hybrid system based on real compromise data may produce good enough MANET.
4.8. Multi-Agents Based Models
Using ant-like agents for route discovery is not very effective for MANETs. In order to cope with the frequent changes of the network topology, a large amount of control data must be exchanged as ant-like agents. On the other hand, multi-agents based routing protocols have been proposed [
8,
11,
12]. Ant-like agents behave not only as explorers for the route finding, but also as messengers to bring actual message data. They actively update the routing tables in the nodes as they determine the next nodes to visit. Agents can react autonomously in the face of changing circumstances. They are more adaptable, and therefore they are more suitable for MANETs.
Minar
et al. proposed a dynamic routing protocol using mobile agents [
8]. Each node has a routing table that stores route information for every destination. As in AntNet and AntHocNet, ant-like agents, called
routing agents are dispatched to explore the network. The node that a
routing agent visits next is selected at the equivalent probability. The
routing agent brings its own history of movement and updates the routing table of the node it is visiting. When a predefined wandering time has expired, then the
routing agent disappears. When a source node wants to send a message to its destination, the node dispatches a series of
message agents that are corresponding data packets.
Message agents also determine their next hop autonomously by looking up the routing table at each node. They repeat these looking-up and hopping actions until they reach their destinations. When they reach their destination, they disappear.
Onishi
et al. improved this model so that the
routing agent also brings the time required to travel from the destination to the current node and the number of hops [
47]. This history is also stored on the routing table. Kawarazaki
et al. further extended this model so that the network does not lose its effectiveness when the number of nodes changes [
48]. Nishimura
et al. still further extended this model so that the network can keep its effectiveness in the face of congestion [
49]. The effectiveness is achieved by the
routing agents. They collect and distribute information about network congestion and update the routing table at each node they visit.
Message agents move from one node to another node based on this information. The
message agent has an evaluation function to select a best route.
5. Discussions and Conclusions
We have reviewed different agent based routing protocols used in MANETs. Any routing protocols used in MANET share common shortcomings. The methods based on the reactive ant-like agents have to wait until the communication routes from the source to the destination have been established [
41,
42,
43]. For example, DSR and AODV, like the reactive ant-like agent approaches, take some time to discover the route, which delays the establishment of the connections in a large scale network [
7]. On the other hand, with the methods based on the proactive ant-like agents, since the route from a source node to the destination may have been already found, the source node can transmit data packets without the delay.
The methods based on the proactive ant-like agents, however, may not function well because the network topology of a MANET is dynamic and lives of the routes are rather short [
8,
9,
25,
26,
27]. They also have too much overhead for relatively the small bandwidth used in MANETs. In order to mitigate the overhead of
backward ants, Schoonderwoed has proposed a routing algorithm that uses only
forward ants to update the routing table of intermediate nodes [
28,
29]. The
forward ants of this algorithm keep the path length from the source node, and update the routing table based on the information. The pheromone value at each intermediate node is given by the
forward ant that comes through the shortest path from the source node. Whenever a node needs to send data packets to the source node, it can use the shortest path for the connection.
In traditional communication scenarios, the source node and destination node act symmetrically. Therefore, when a network uses only forward ants, other forward ants may go back to the destination to the source node resulting in the same situation using the forward ants and backward ants. In multi-agent systems, however, the communication is asymmetrical. A message, or even a complete task, is conveyed by an agent. Therefore, using only forward ants to explore the network is then a good idea. In addition, unlike in AntNet or AntHocNet where the nodes have learning ability to cope with the changing network topology (by sending hello messages to each other), in the multi-agent environment, mobile agents keep the information about the network and learn as they move onto the network so that the backward ants that update the routing tables are not necessary. Mobile agents utilize the routing tables as shared data structures by which they exchange information with each other. Routing tables are updated by the mobile agents only for exchanging routing information between mobile agents.
The author has conducted resource discovery algorithms based on the ant colony optimization in peer-to-peer networks [
50,
51]. The idea that ant-like agents roam in the network to look for a particular resource has some similarities to finding topology of a network. We have recently expanded the idea to not only data traffic but also human refugees’ flow [
52]. Each node,
i.e., human refugee, has a smartphone with GPS so that the smartphone senses the flow of the people and guides him to the most promising evacuation route. In such situations, we cannot rely on a base station, and have to depend on
ad hoc networks. The
ad hoc network has many promising applications. We are witnessing the coming era of ubiquitous computing through MANETs, and the more the applications that are developed the more efficient routing protocols are required. The Ant-AODV like hybrid routing protocol may provide high connectivity with minimum overhead for processing ant-like agents.
In multi-agent environments, not only route exploration ants but also data packets, or even complete tasks may be incorporated into mobile agents. Therefore establishing a communication route from the source node to the destination node before dispatching mobile agents is not necessary and it is natural not to use backward ants to update routing tables to establish the best route. In such a model, each agent has to have some kind of evaluation function to select a best route at each intermediate node. As Nishimura points out, however, it is almost impossible to determine a generic function [
49]. There are too many factors that affect such a function: for example, the positional relationship among nodes, the change over time of frequency of sending data packets, and the change of network topology. The evaluation function may be tailored for a particular environment. Incorporating learning ability into mobile agents is a possible research direction we can pursue.
In this paper, we have focused the domain of the ant the colony optimization framework for routing protocols, because we believe that exploring those protocols is beneficial for constructing systems that employ multiple mobile agents in which we are currently engaged. A more general encyclopedically comprehensive survey on the routing protocols in MANETs can be found in [
53].
For the next step of the review about the routing protocols based on ant-like mobile agents we would like to pursue the different aspects of those protocols such as route congestions and the broadcast behaviors in network performance. Those issues naturally denote the future directions.

{kind=link}
{kind=link}


