
An Optimization Clustering Algorithm Based on Texture Feature Fusion for Color Image Segmentation

Abstract
:1. Introduction
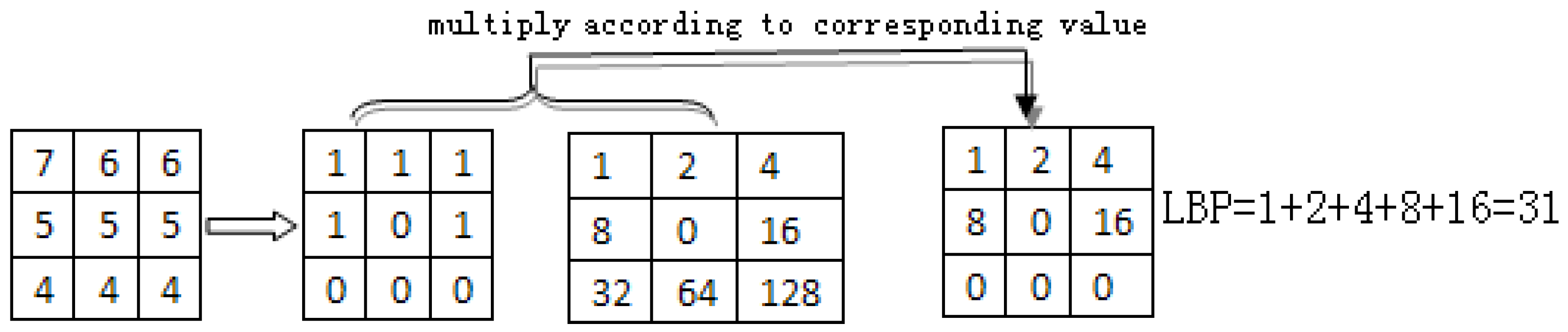
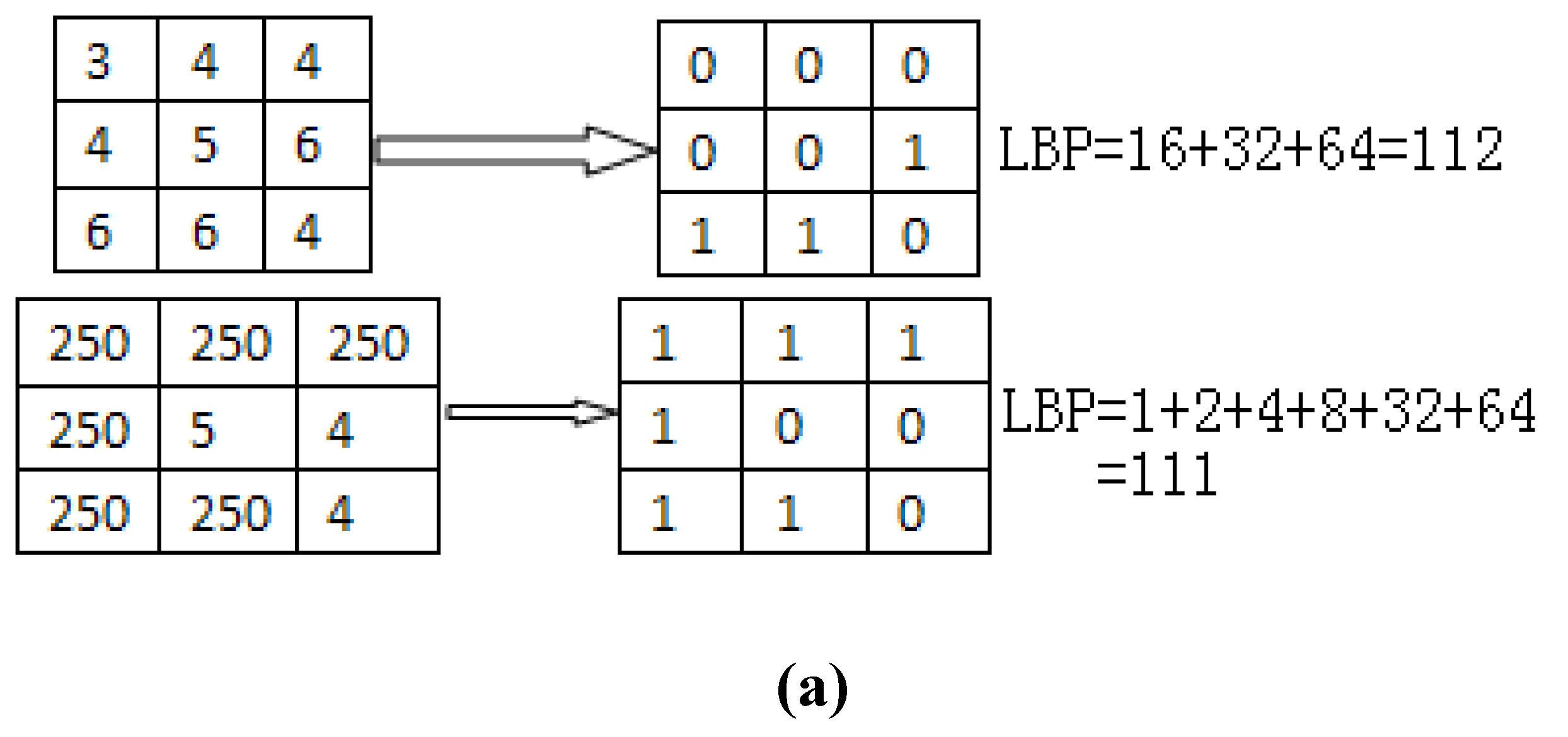
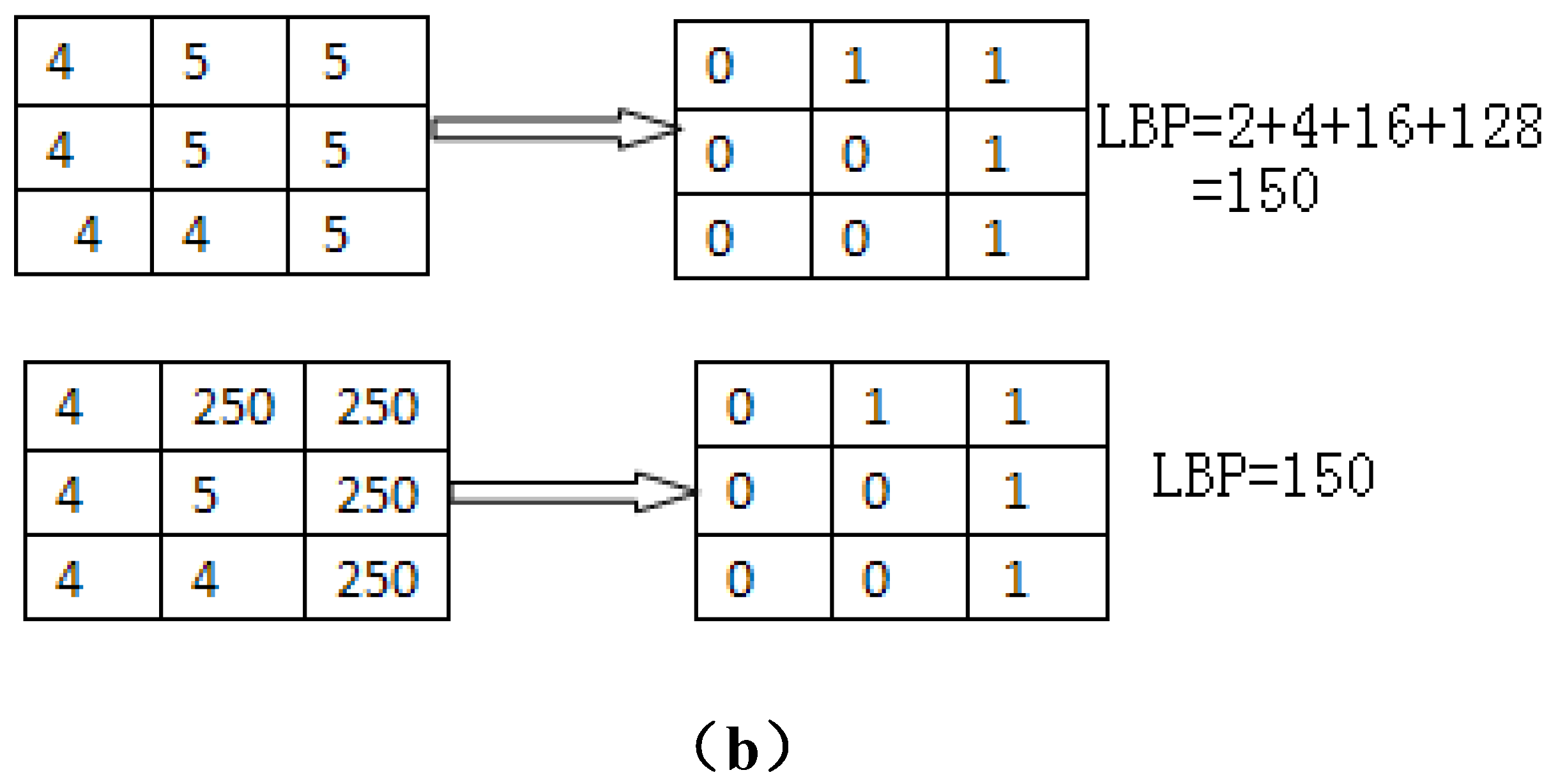
2. LBP Texture Operators



3. The PSO Algorithm
4. The Proposed Method
4.1. Feature Extraction
4.2. Improving FCM Algorithm
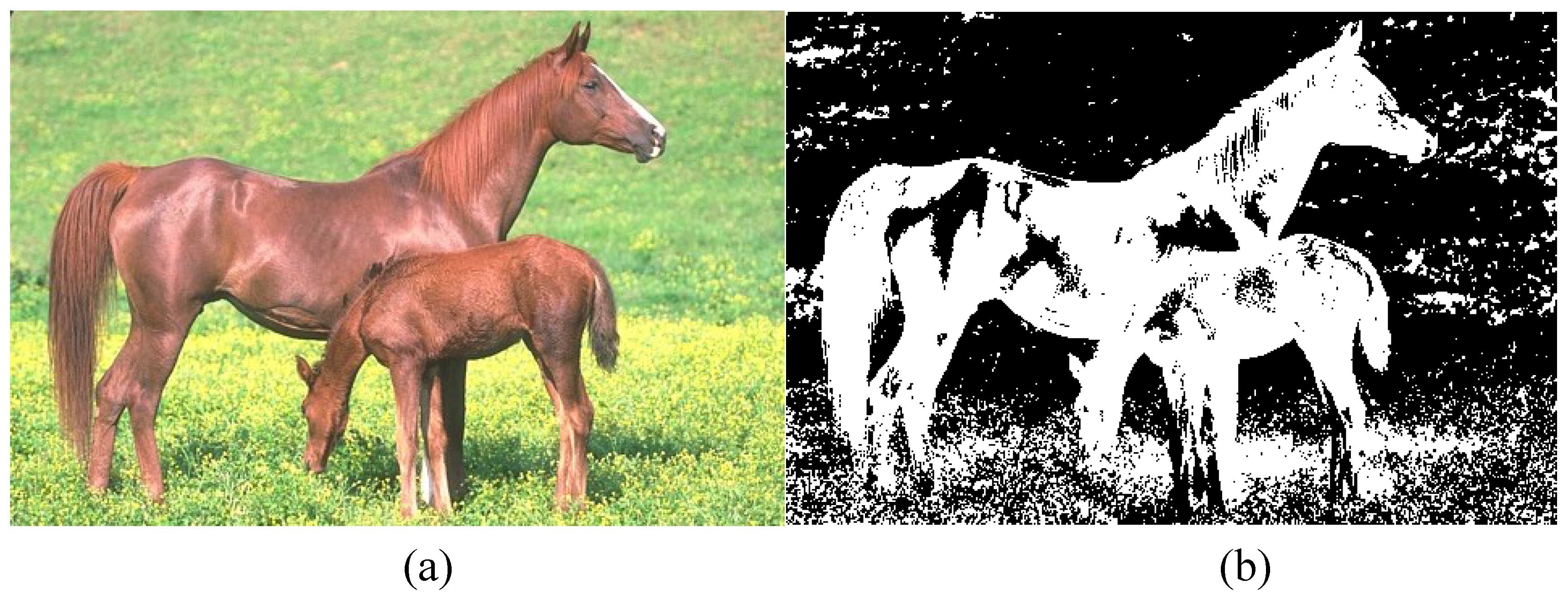
5. Experiments
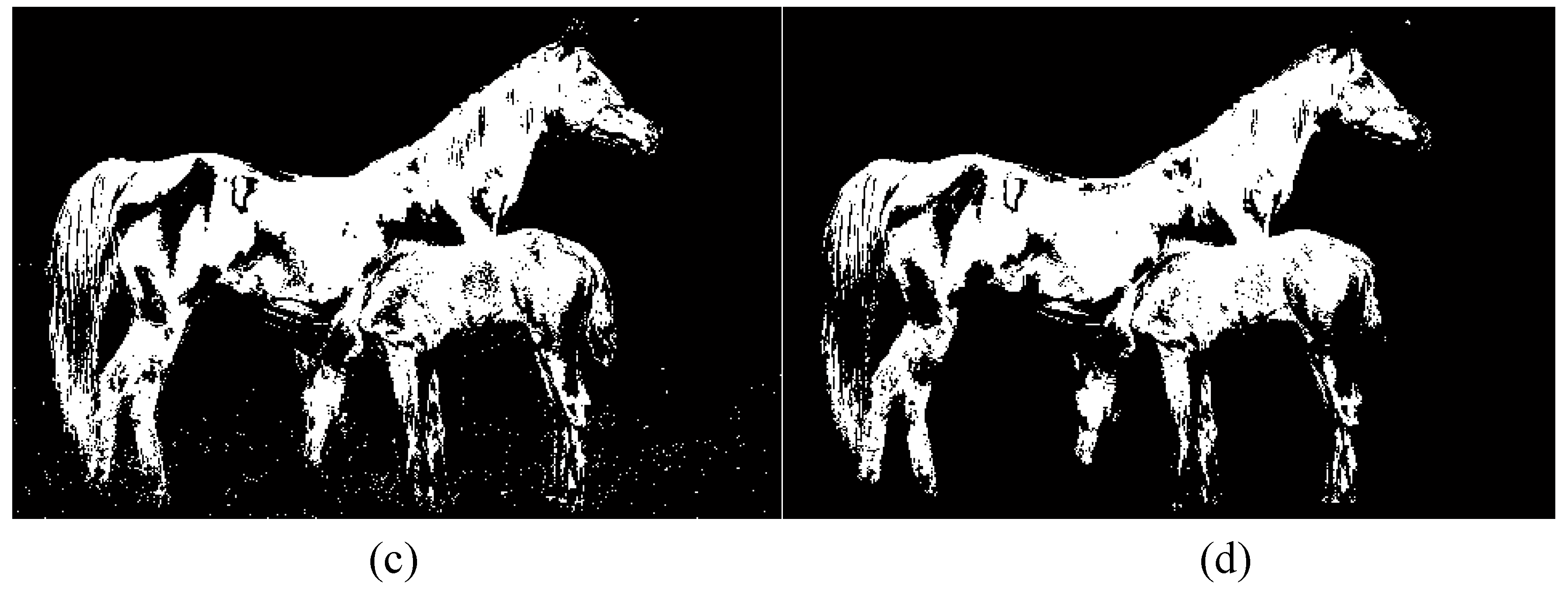
5.1. Multi-Feature Optimization Clustering Segmentation



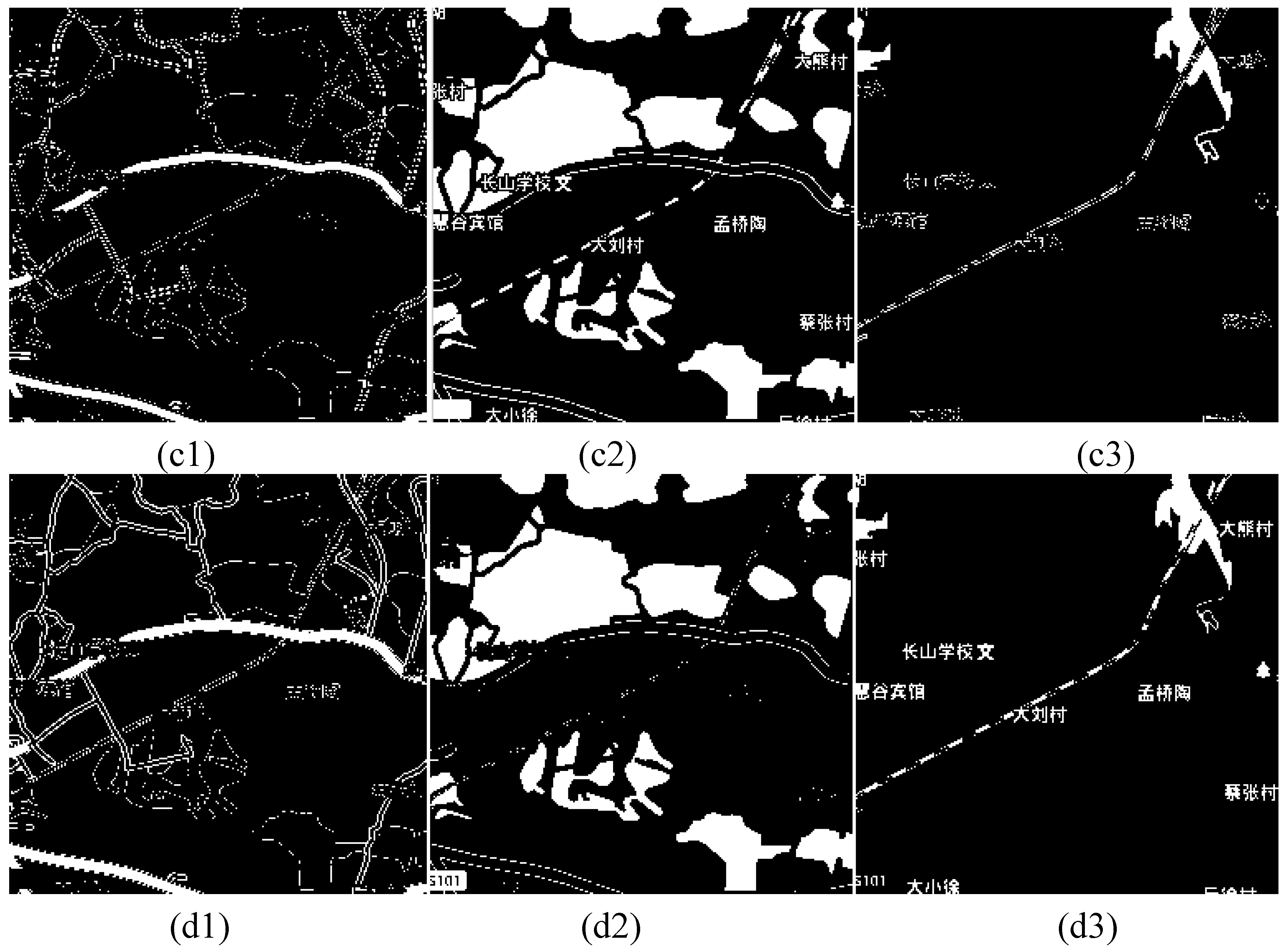
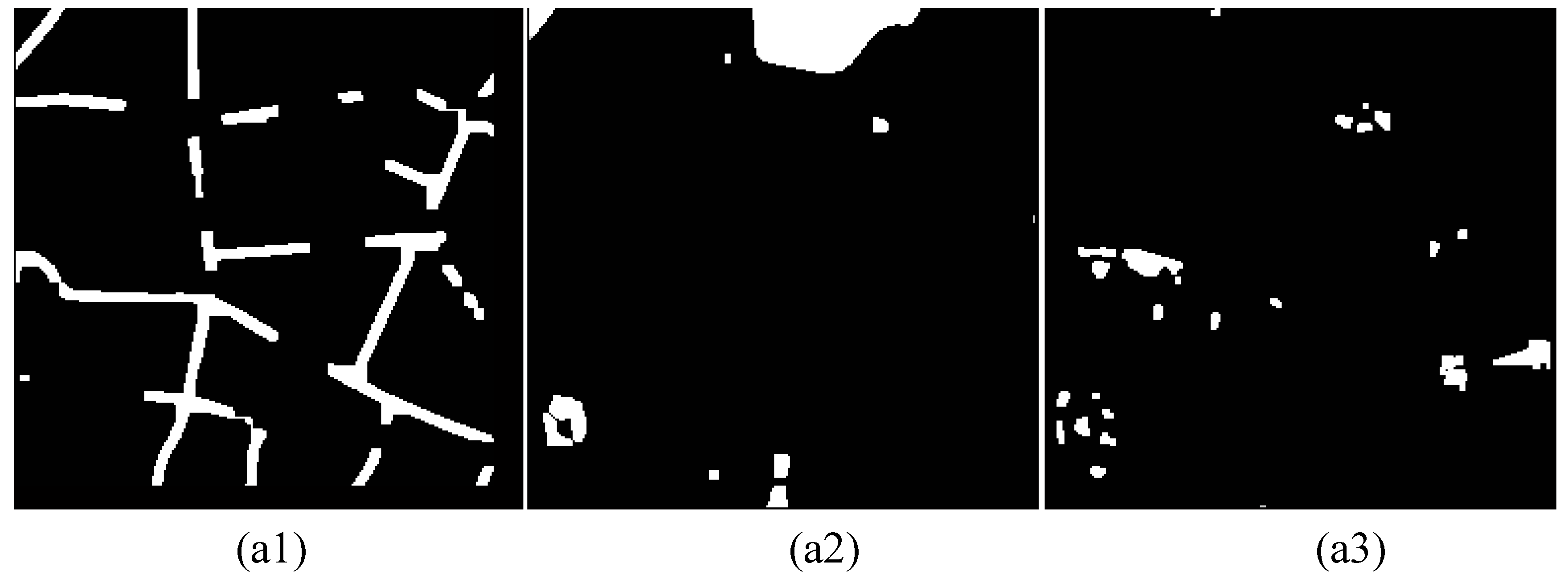
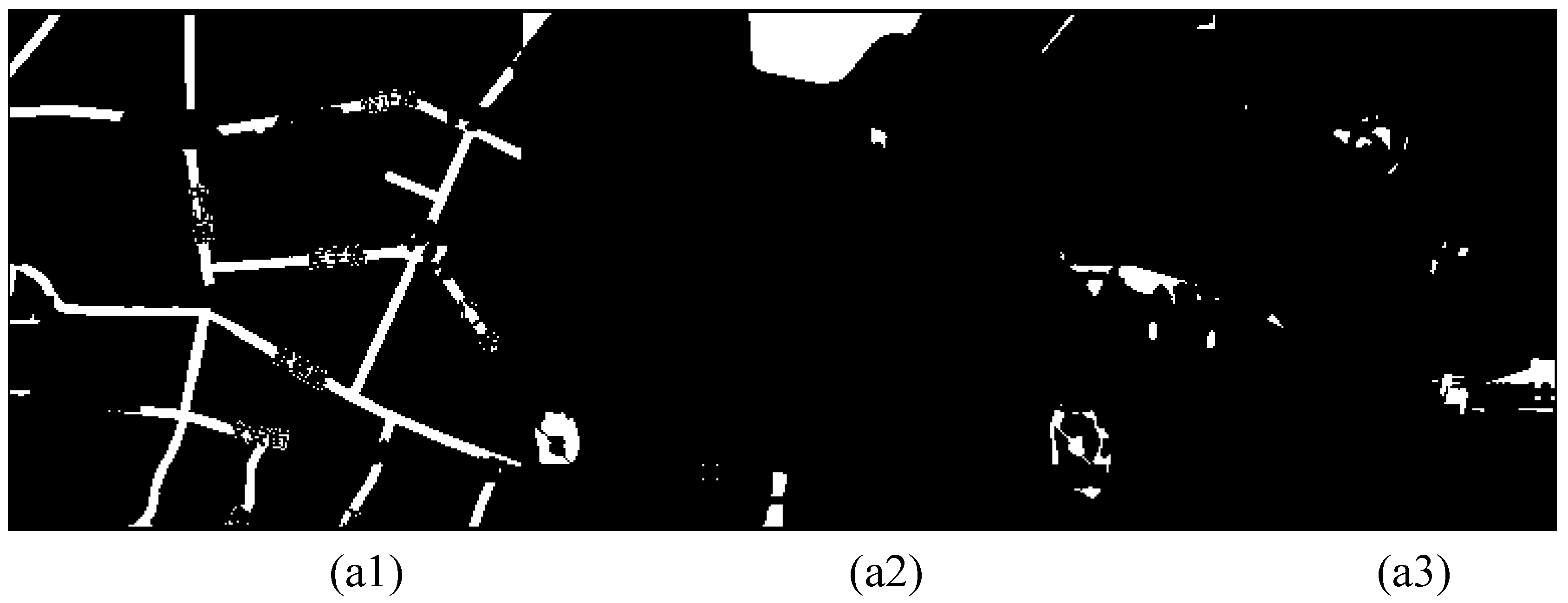
5.2. Post-Processing


5.3. Ratio of Misclassification


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | KFCM_F | FCM_S | The proposed | |
|---|---|---|---|---|
| “map1” image | The ratios of misclassification of “lake” | 35.70% | 31.00% | 1.1% |
| The ratios of misclassification of “terrain” | 32.05% | 19.56% | 5.05% | |
| The ratios of misclassification of “road” | 20.33% | 15.81% | 10.24% |
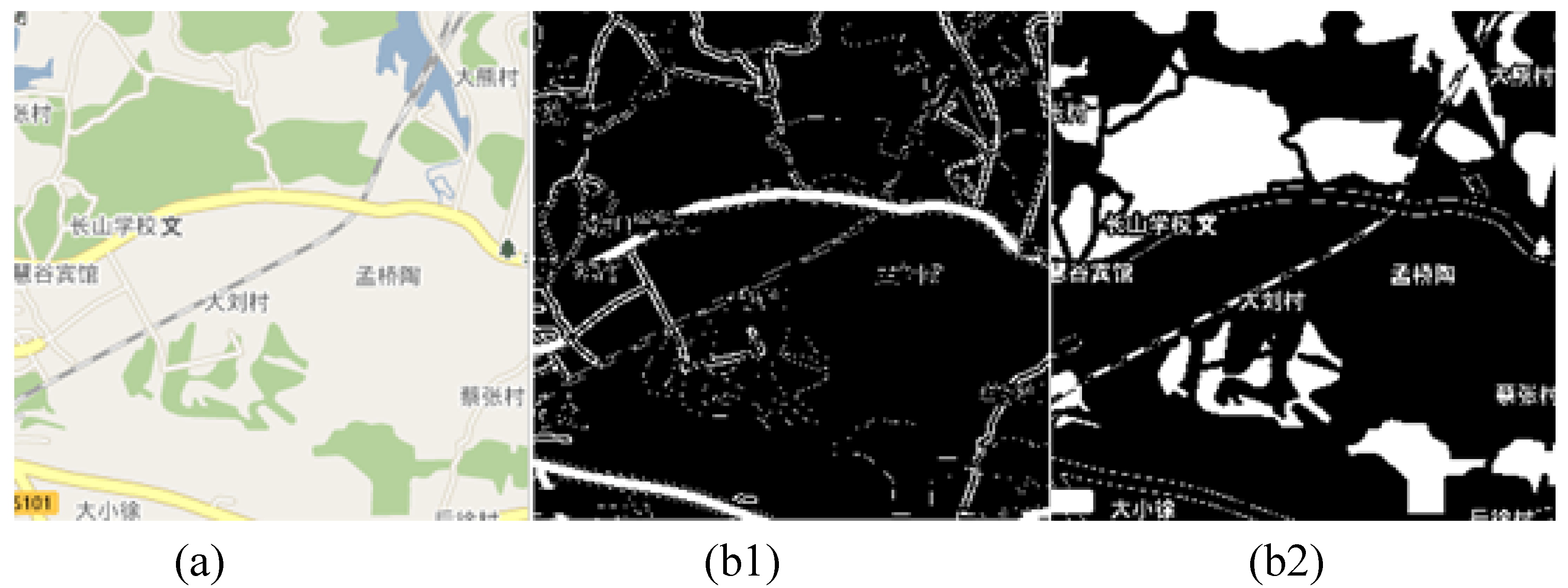
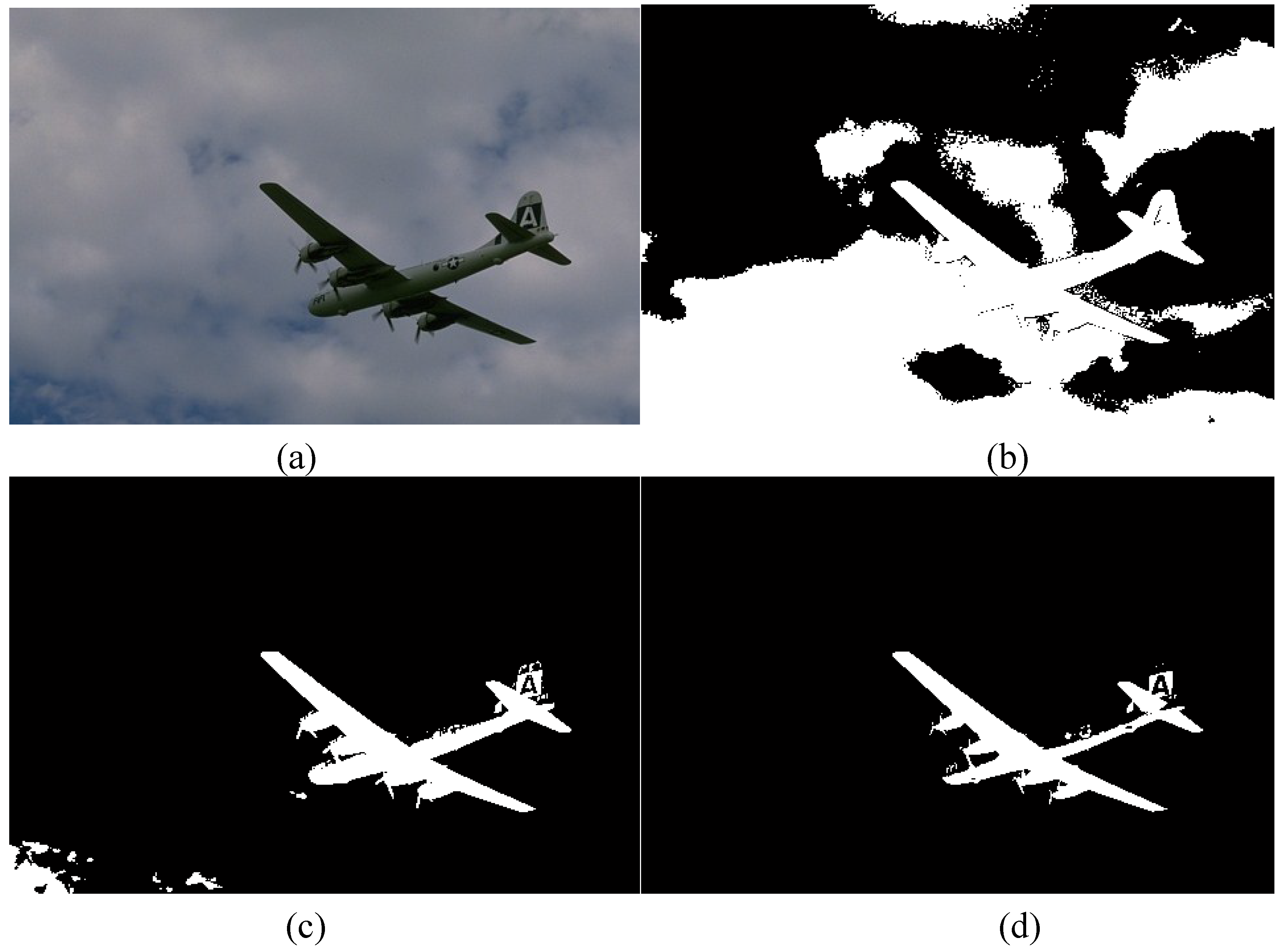
5.4 Extended Experiments for Target Extraction



6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Graves, D.; Pedrycz, W. Kernel-based fuzzy clustering and fuzzy clustering: A comparative experimental study. Fuzzy Sets Syst. 2010, 161, 522–543. [Google Scholar] [CrossRef]
- Kannan, S.R.; Ramathilagam, S.; Devi, R.; Sathy, A. Robust kernel FCM in segmentation of breast medical images. Expert Syst. Appl. 2011, 38, 4382–4389. [Google Scholar] [CrossRef]
- Mújica-Vargas, D.; Gallegos-Funes, F.J.; Rosales-Silva, A.J. A fuzzy clustering algorithm with spatial robust estimation constraint for noisy color image segmentation. Pattern Recognit. Lett. 2013, 34, 400–413. [Google Scholar] [CrossRef]
- Zhao, F.; Jiao, L.C.; Liu, H.Q.; Gao, X.B. A novel fuzzy clustering algorithm with non-local adaptive spatial constraint for image segmentation. Signal Process. 2011, 91, 988–999. [Google Scholar] [CrossRef]
- Qiu, C.; Xiao, J.; Yu, L.; Han, L.; Iqbal, M.N. A modified interval type-2 fuzzy C-means algorithm with application in MR image segmentation. Pattern Recognit. Lett. 2013, 34, 1329–1338. [Google Scholar] [CrossRef]
- Costa, Y.M.G.; Oliveira, L.S.; Koerich, A.L.; Gouyon, F.; Martins, J.G. Music genre classification using LBP textural features. Signal Process. 2012, 92, 2723–2737. [Google Scholar] [CrossRef]
- Shan, C.; Gong, S.; McOwan, P.W. Facial expression recognition based on Local Binary Patterns:A comprehensive study. Image Vis. Comput. 2009, 27, 803–816. [Google Scholar] [CrossRef]
- Moore, S.; Bowden, R. Local binary patterns for multi-view facial expression recognition. Comput. Vis. Image Underst. 2011, 115, 541–558. [Google Scholar] [CrossRef]
- Luo, Y.; Wu, C.; Zhang, Y. Facial expression recognition based on fusion feature of PCA and LBP with SVM. Int. J. Light Electron Optics. 2013, 124, 2767–2770. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, M.; Ishikawa, H.; Wollstein, G.; Schuman, J.S. Automated macular pathology diagnosis in retinal OCT images using multi-scale spatial pyramid and local binary patterns in texture and shape encoding. Med. Image Anal. 2011, 15, 748–759. [Google Scholar] [CrossRef] [PubMed]
- Heikkila, M.; Ainen, M.; Schmid, C. Description of interest regions with local binary patterns. Pattern Recognit. 2009, 42, 425–436. [Google Scholar] [CrossRef]
- Nanni, L.; Lumini, A. Local binary patterns for a hybrid fingerprint matcher. Pattern Recognit. 2008, 41, 3461–3466. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks, Perth, WA, USA, 1995; pp. 1942–1948.
- Jie, J.; Zeng, J.; Han, C.; Wang, Q. Knowledge-based cooperative particle swarm optimization. Appl. Math. Comput. 2008, 205, 861–873. [Google Scholar] [CrossRef]
- Tsai, C.; Kao, I. Particle swarm optimization with selective particle regeneration for data clustering. Expert Syst. Appl. 2011, 38, 6565–6576. [Google Scholar] [CrossRef]
- Bedi, P.; Bansal, R.; Sehgal, P. Using PSO in a spatial domain based image hiding scheme with distortion tolerance. Comput. Elect. Engin. 2013, 39, 640–654. [Google Scholar] [CrossRef]
- Vellasques, E.; Sabourin, R.; Granger, E. Fast intelligent watermarking of heterogeneous image streams through mixture modeling of PSO populations. Appl. Soft Comput. 2013, 13, 3130–3148. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Harwood, D. A comparative study of texture measure with classification based on feature distribution. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- The Berkeley Segmentation Dataset and Benchmark. Available online: http://www.eecs.berkeley.edu/Research/Projects/CS/vision/bsds/ (accessed on 4 May 2015).
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Liu, Y.; Xiong, C. An Optimization Clustering Algorithm Based on Texture Feature Fusion for Color Image Segmentation. Algorithms 2015, 8, 234-247. https://doi.org/10.3390/a8020234
Wang G, Liu Y, Xiong C. An Optimization Clustering Algorithm Based on Texture Feature Fusion for Color Image Segmentation. Algorithms. 2015; 8(2):234-247. https://doi.org/10.3390/a8020234
Chicago/Turabian StyleWang, Gaihua, Yang Liu, and Caiquan Xiong. 2015. "An Optimization Clustering Algorithm Based on Texture Feature Fusion for Color Image Segmentation" Algorithms 8, no. 2: 234-247. https://doi.org/10.3390/a8020234
APA StyleWang, G., Liu, Y., & Xiong, C. (2015). An Optimization Clustering Algorithm Based on Texture Feature Fusion for Color Image Segmentation. Algorithms, 8(2), 234-247. https://doi.org/10.3390/a8020234