
Review of Recent Type-2 Fuzzy Controller Applications


{kind=link}
Abstract
:1. Introduction
2. T2 FLS
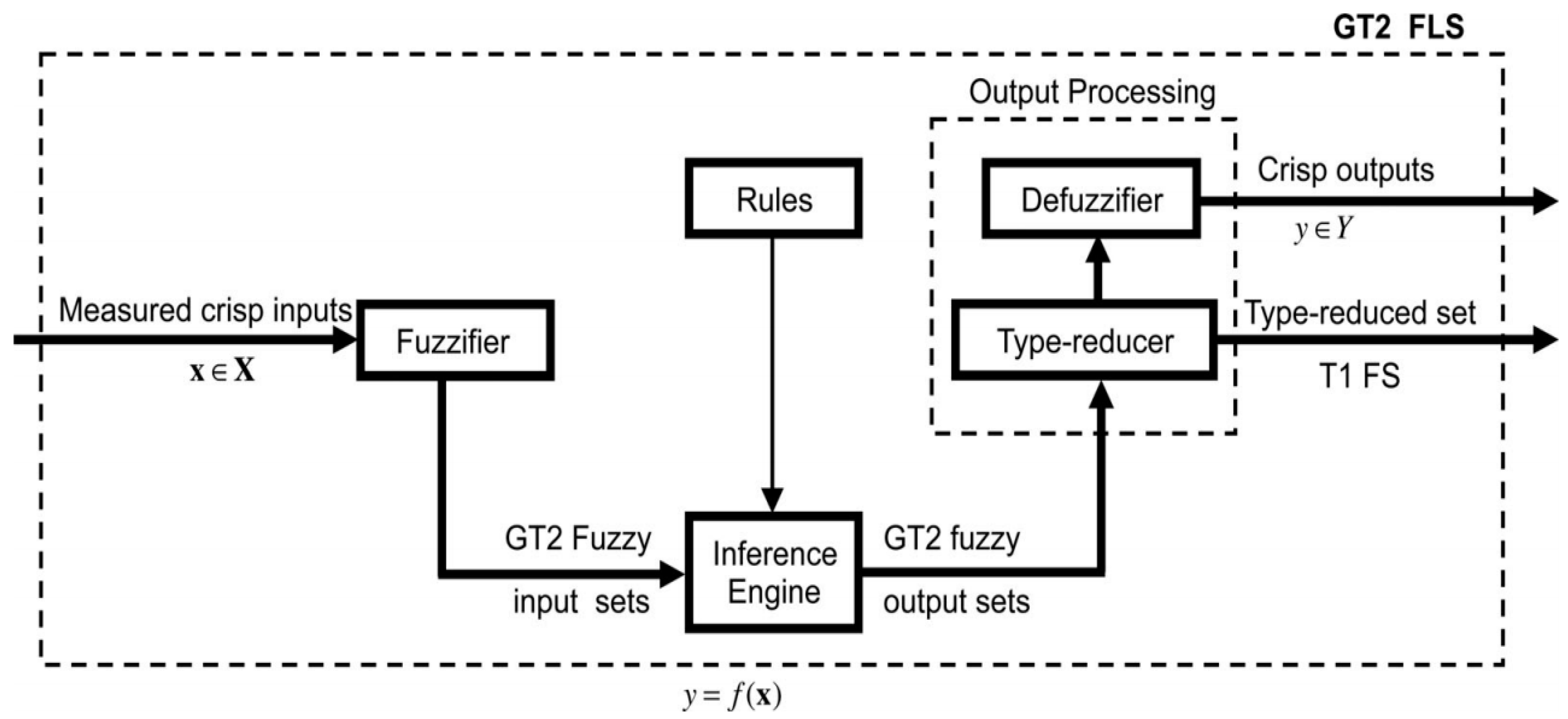
2.1. General T2 FLS
2.2. IT2 FLS
2.2.1. Karnik–Mendel Method
- (1)
- Arrange in ascending order.
- (2)
- is calculated as:; let (note that are the firing intervals).
- (3)
- Find , such that .
- (4)
- Find with for and for ; now, let
- (5)
- If , go to Step 6. If set
- (6)
- Let = , and go to Step 3.
2.2.2. Wu–Mendel Method
2.2.3. Biglarbegian–Melek–Mendel Method
2.2.4. Nie–Tan Method
2.2.5. Other IT2 Algorithms
3. Review of IT2 FLCs
3.1. Robotic Control
3.2. Controller Systems Using IT2 FLC and Neural Networks
3.3. Internet Bandwidth Control
3.4. Industrial System Controllers
3.5. Power Management and Electrical Control
3.6. Aircraft Control
3.7. General Control Problems
3.8. Membership Functions Used in T2 FLC Applications
4. Conclusions
Conflicts of Interest
Abbreviations
| FLS | fuzzy logic systems |
| FLC | fuzzy logic controller |
| T2 | Type-2 |
| IT2 | Type-2 |
| T1 | Type-1 |
| KM | Karnik–Mendel |
| EKM | Enhanced Karnik–Mendel |
| WM | Wu–Mendel |
| BMM | Biglarbegian–Melek–Mendel |
| NT | Nie–Tan |
References
- Zadeh, L.A. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Mamdani, E.H.; Baaklini, N. Prescriptive method for deriving control policy in a fuzzy-logic controller. Electron. Lett. 1975, 11, 625–626. [Google Scholar] [CrossRef]
- Zamani, M.; Nejati, H.; Jahromi, A.T.; Partovi, A.R.; Nobari, S.H.; Shirazi, G.N. Toolbox for Interval Type-2 Fuzzy Logic Systems. In Proceedings of the Joint Conference on Information Sciences, Shenzhen, China, 15–20 December 2008.
- Liang, Q.; Mendel, J.M. Interval Type-2 Fuzzy Logic Systems: Theory and Design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef]
- Hisdal, E. The IF THEN ELSE statement and interval-valued fuzzy sets of higher type. Int. J. Man-Mach. Stud. 1981, 15, 385–455. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.; Liu, F. Interval Type-2 Fuzzy logic Systems Made Simple. IEEE Trans. Fuzzy Syst. 2006, 14, 808–821. [Google Scholar] [CrossRef]
- Biglarbegian, M.; Melek, W.; Mendel, J.M. On the robustness of Type-1 and Interval Type-2 fuzzy logic systems in modeling. Inf. Sci. 2011, 181, 1325–1347. [Google Scholar] [CrossRef]
- Chopra, S.; Mitra, R.; Kumar, V. Fuzzy Controller: Choosing an Appropriate and Smallest Rule Set. Int. J. Comput. Cogn. 2005, 3, 73–79. [Google Scholar]
- Mendel, J.M. General Type-2 fuzzy logic systems made simple: A tutorial. IEEE Trans. Fuzzy Syst. 2014, 22, 1162–1182. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M.; Liang, Q. Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 1999, 7, 643–658. [Google Scholar] [CrossRef]
- Schrieber, M.D.; Biglarbegian, M. Hardware implementation and performance comparison of interval Type-2 fuzzy logic controllers for real-time applications. Appl. Soft Comput. 2015, 32, 175–188. [Google Scholar] [CrossRef]
- Torshizi, A.D.; Zarandi, M.H.F.; Zakeri, H. On type-reduction of Type-2 fuzzy sets: A review. Appl. Soft Comput. 2015, 27, 614–627. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M. Centroid of a Type-2 fuzzy set. Inf. Sci. 2001, 132, 195–220. [Google Scholar] [CrossRef]
- Mendel, J.M. Rule-Based Fuzzy Logic Systems: Introduction and New Directions; Prentice-Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Greenfield, S.; Chiclana, F. Accuracy and complexity evaluation of defuzzification strategies for the discretised interval Type-2 fuzzy set. Int. J. Approx. Reason. 2013, 54, 1013–1033. [Google Scholar] [CrossRef]
- Wu, D.; Nie, M. Comparison and Practical Implementation of Type-Reduction Algorithms for Type-2 Fuzzy Sets and Systems. In Proceedings of the IEEE International Conference on Fuzzy Systems, Taipei, Taiwan, 27–30 June 2011.
- Liu, F.; Mendel, J. Aggregation Using the Fuzzy Weighted Average as Computed by the Karnik-Mendel Algorithms. IEEE Trans. Fuzzy Syst. 2008, 16, 1–12. [Google Scholar]
- Dodurka, M.F.; Kumbasar, T.; Sakalli, A.; Yesil, E. Boundary Function based Karnik-Mendel type Reduction Method for Interval Type-2 Fuzzy PID Controllers. In Proceedings of the IEEE International Conference on Fuzzy Systems, Beijing, China, 6–11 July 2014.
- Wu, D.; Mendel, J.M. Enhanced Karnik-Mendel Algorithms. IEEE Trans. Fuzzy Syst. 2009, 17, 923–934. [Google Scholar]
- Melgarejo, M.A.; Duran, L.K. A Hardware Architecture Proposal for the Enhanced Karnik Mendel Algorithm Based on Sequential Arithmetic Operators. In Proceedings of the IEEE International Conference on Fuzzy Systems, Barcelona, Spain, 18–23 July 2010.
- Mendel, J.M. Type-2 Fuzzy Sets and Systems: An Overview. IEEE Comput. Intell. 2007, 2, 20–29. [Google Scholar] [CrossRef]
- Wu, H.; Mendel, J.M. Uncertainity bounds and their use in the design of interval Type-2 fuzzy logic systems. IEEE Trans. Fuzzy Syst. 2002, 10, 622–639. [Google Scholar]
- Biglarbegian, M.; Melek, W.; Mendel, J.M. On the Stability of Interval Type-2 TSK Fuzzy Logic Control Systems. IEEE Trans. Syst. Man Cybern. 2010, 40, 798–818. [Google Scholar] [CrossRef] [PubMed]
- Biglarbegian, M. On the design of robust intelligent controllers with application to mobile robot tracking. In Proceedings of the American Control Conference, Montreal, QC, Canada, 27–29 June 2012.
- Nie, M.; Tan, W.W. Toward an efficient type-reduction method for interval Type-2 fuzzy logic systems. In Proceedings of the IEEE International Conference on Fuzzy Systems, Hong Kong, China, 1–6 June 2008.
- Mendel, J.M.; Liu, X. Simplified Interval Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2013, 21, 1056–1069. [Google Scholar] [CrossRef]
- Coupland, S.; John, R. Geometric Type-1 and Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2007, 15, 3–15. [Google Scholar] [CrossRef]
- Wu, D. Approaches for Reducing the Computational Cost of Interval Type-2 Fuzzy Logic Systems: Overview and Comparisons. IEEE Trans. Fuzzy Syst. 2013, 21, 80–99. [Google Scholar] [CrossRef]
- Khosravi, A.; Nahavandi, S. Effects of type reduction algorithms on forecasting accuracy of IT2FLS models. Appl. Soft Comput. 2014, 17, 32–38. [Google Scholar] [CrossRef]
- Greenfield, S.; Chiclana, F.; Coupland, S.; John, R. The collapsing method of defuzzification for discretised interval Type-2 fuzzy sets. Inf. Sci. 2009, 179, 2055–2069. [Google Scholar] [CrossRef]
- Du, X.; Ying, H. Derivation and Analysis of the Analytical Structures of the Interval Type-2 Fuzzy-PI and PD Controllers. IEEE Trans. Fuzzy Syst. 2010, 18, 802–814. [Google Scholar]
- Tao, C.W.; Taur, J.S.; Chang, C.-W.; Chang, Y.-H. Simplified Type-2 fuzzy sliding controller for wing rock system. Fuzzy Sets Syst. 2012, 207, 111–129. [Google Scholar] [CrossRef]
- Li, C.; Yi, J.; Zhao, D. A Novel Type-Reduction Method for Interval Type-2 Fuzzy Logic Systems. In Proceedings of the Fifth International Conference on Fuzzy Systems and Knowledge Discovery, Jinan, China, 18–20 October 2008.
- Torshizi, A.D.; Zarandi, M.H.F. Hierarchical collapsing method for direct defuzzification of general Type-2 fuzzy sets. Inf. Sci. 2014, 277, 842–861. [Google Scholar] [CrossRef]
- Melgarejo, M. A Fast Recursive Method to Compute the Generalized Centroid of an Interval Type-2 Fuzzy Set. In Proceedings of the Annual Meeting of the North American Fuzzy Information Processing Society, San Diego, CA, USA, 24–27 June 2007.
- Hassan, S.; Khanesar, M.A.; Kayacan, E.; Jaafar, J.; Khosravi, A. Optimal design of adaptive Type-2 neuro-fuzzy systems: A review. Appl. Soft Comput. 2016, 44, 134–143. [Google Scholar] [CrossRef]
- Hagras, H.A. A Hierarchical Type-2 Fuzzy Logic Control Architecture for Autonomous Mobile Robots. IEEE Trans. Fuzzy Syst. 2004, 12, 524–539. [Google Scholar] [CrossRef]
- Biglarbegian, M.; Melek, W.; Mendel, J.M. Design of Novel Interval Type-2 Fuzzy Controllers for Modular and Reconfigurable Robots: Theory and Experiments. IEEE Trans. Ind. Electron. 2011, 58, 1371–1384. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Wang, Y. A Type-2 Fuzzy Switching Control System for Biped Robots. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2007, 37, 1202–1213. [Google Scholar] [CrossRef]
- Juang, C.-F.; Hsu, C.-H. Reinforcement Ant Optimized Fuzzy Controller for Mobile-Robot Wall-Following Control. IEEE Trans. Ind. Electron. 2009, 56, 3931–3940. [Google Scholar] [CrossRef]
- Kumbasar, T.; Hagras, H. Big Bang—Big Crunch optimization based interval Type-2 fuzzy PID cascade controller design strategy. Inf. Sci. 2014, 282, 277–295. [Google Scholar] [CrossRef]
- Khanesar, M.A.; Kayacan, E. Feedback error learning control of magnetic satellites using Type-2 fuzzy neural networks with elliptic membership functions. IEEE Trans. Cybern. 2015, 45, 858–868. [Google Scholar] [CrossRef] [PubMed]
- Chaoui, H.; Gueaieb, W. Type-2 Fuzzy Logic Control of a Flexible-Joint Manipulator. J. Intell. Robot. Syst. 2008, 51, 159–186. [Google Scholar] [CrossRef]
- Chen, C.-S. Supervisory adaptive tracking control of robot manipulators using interval Type-2 TSK fuzzy logic system. IET Control Theory Appl. 2011, 5, 1796–1807. [Google Scholar] [CrossRef]
- Allawi, Z.T.; Abdalla, T.Y. A PSO-Optimized Type-2 Fuzzy Logic Controller for Navigation of Multiple Mobile Robots. In Proceedings of the IEEE International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014.
- Selvi, V.; Umarani, R. Comparative Analysis of Ant Colony and Particle Swarm Optimization Techniques. Int. J. Comput. Appl. 2010, 5, 1–6. [Google Scholar] [CrossRef]
- Astudillo, L.; Castillo, O.; Melin, P.; Alanis, A.; Soria, J.; Aguilar, L.T. Intelligent Control of an Autonomous Mobile Robot using Type-2 Fuzzy Logic. Eng. Lett. 2006, 13, 88–93. [Google Scholar]
- Valdez, F.; Melin, P.; Castillo, O. Fuzzy Control of Parameters to Dynamically Adapt the PSO and GA Algorithms. In Proceedings of the IEEE International Conference on Fuzzy Systems, Barcelona, Spain, 18–23 July 2010.
- Martinez, R.; Rodriguez, A.; Castillo, O.; Aguilar, L.T. Type-2 Fuzzy Logic Controllers Optimization using Genetic Algorithms and Particle Swarm Optimization. In Proceedings of the IEEE International Conference on Granular Computing, San Jose, CA, USA, 14–16 August 2010.
- Martinez-Soto, R.; Castillo, O.; Aguilar, L.T. Type-1 and Type-2 fuzzy logic controller design using a Hybrid PSO-GA optimization method. Inf. Sci. 2014, 285, 35–49. [Google Scholar] [CrossRef]
- Castillo, O.; Neyoy, H.; Soria, J.; Melin, P.; Valdez, F. A new approach for dynamic fuzzy logic parameter tuning in Ant Colony Optimization and its application in fuzzy control of mobile robot. Appl. Soft Comput. 2015, 28, 150–159. [Google Scholar] [CrossRef]
- Mohammadi, S.M.; Gharaveisi, A.A.; Machinchi, M. An Evolutionary Tuning Technique for Type-2 Fuzzy Logic Controller in a Non-linear System Under Uncertainty. In Proceedings of the Electrical Engineering (ICEE), Isfahan, Iran, 11–13 May 2010.
- Cortes-Rios, J.C.; Gomez-Ramirez, E.; Ortiz-de-la-Vega, H.A.; Castillo, O.; Melin, P. Optimal design of interval type 2 fuzzy controllers based on a simple tuning algorithm. Appl. Soft Comput. 2014, 23, 270–285. [Google Scholar] [CrossRef]
- Mohammadi, S.M.; Gharaveisi, A.; Mashinchi, M.; Vaezi-Nejad, S. Development of a novel reinforcement learning automata method for optimum design of proportional integral deviation controller for nonlinear systems. In Proceedings of the World Congress On Engineering, London, UK, 2–4 July 2008.
- Hassan, M.Y.; Kothapalli, G. Interval Type-2 fuzzy position control of electro-hydraulic actuated robotic excavator. Int. J. Min. Sci. Technol. 2012, 22, 437–445. [Google Scholar] [CrossRef]
- Linda, O.; Manic, M. Uncertainty-Robust Design of Interval Type-2 Fuzzy Logic Controller for Delta Parallel Robot. IEEE Trans. Ind. Inf. 2011, 7, 661–670. [Google Scholar] [CrossRef]
- Ganjefar, S.; Solgi, Y. A Lyapunov stable Type-2 fuzzy wavelet network controller design for a bilateral teleoperation system. Inf. Sci. 2015, 311, 1–17. [Google Scholar] [CrossRef]
- Jammeh, E.A.; Fleury, M.; Wagner, C.; Hagras, H.; Ghanbari, M. Interval Type-2 Fuzzy Logic Congestion Control for Video Streaming Across IP Networks. IEEE Trans. Fuzzy Syst. 2009, 17, 1123–1149. [Google Scholar] [CrossRef]
- Jammeh, E.; Mkwawa, I.; Sun, L.; Ifeachor, E. Type-2 fuzzy logic control of PQoS driven adaptive VoIP scheme. Electron. Lett. 2010, 46, 137–138. [Google Scholar] [CrossRef]
- Jammeh, E.A.; Fleury, M.; Ghanbari, M. Fuzzy logic congestion control for broadband wireless IPTV. Electron. Lett. 2008, 44, 1365–1366. [Google Scholar] [CrossRef]
- Kabranov, O.; Yang, T.; Makrakis, D. Fuzzy Control pf Pricing for Bandwidth Demand in Obtainable Forwarding Service for Differentiated Services Architecture. In Proceedings of the IEEE Global Telecommunications Conference, Taipei, Taiwan, 17–21 November 2002.
- Own, C.-M. Predictable Type-2 fuzzy mobile units for energy balancing in wireless sensor networks. Inf. Sci. 2013, 241, 70–84. [Google Scholar] [CrossRef]
- Méndez, G.M.; Leduc-Lezama, L.; Colás, R.; Murillo-Perez, G.; Ramirez-Cuellar, J.; López, J.J. Modelling and control of coiling entry temperature using interval Type-2 fuzzy logic systems. Ironmak. Steelmak. 2010, 37, 126–134. [Google Scholar] [CrossRef]
- Méndez, G.M.; Castillo, O.; Colás, R.; Moreno, H. Finishing mill strip gage setup and control by internal Type-1 non-singleton Type-2 fuzzy logic systems. Appl. Soft Comput. 2014, 24, 900–911. [Google Scholar] [CrossRef]
- Lin, F.-J.; Shieh, P.-H.; Hung, Y.-C. An intelligent control for linear ultrasonic motor using interval Type-2 fuzzy neural network. IET Electr. Power Appl. 2008, 2, 32–41. [Google Scholar] [CrossRef]
- Barkat, S.; Tlemçani, A.; Nouri, H. Noninteracting Adaptive Control of PMSM Using Interval Type-2 Fuzzy Logic Systems. IEEE Trans. Fuzzy Syst. 2011, 19, 925–936. [Google Scholar] [CrossRef]
- Chen, C.-S.; Lin, W.-C. Self-adaptive interval Type-2 neural fuzzy network control for PMLSM drives. Expert Syst. Appl. 2011, 38, 14679–14689. [Google Scholar] [CrossRef]
- Naik, N.V.; Singh, S.P. Improved Torque and Flux Performance of Type-2 Fuzzy-based Direct Torque Control Induction Motor Using Space Vector Pulse-width Modulation. Electr. Power Compon. Syst. 2014, 42, 658–669. [Google Scholar] [CrossRef]
- Ramesh, T.; Panda, A.K.; Kumar, S.S. Type-1 and Type-2 Fuzzy Logic and Sliding-Mode Based Speed Control of Direct Torque and Flux Control Induction Motor Drives—A Comparative Study. Int. J. Emerg. Electr. Power Syst. 2013, 14, 385–400. [Google Scholar] [CrossRef]
- Yu, W.-S.; Chen, H.-S. Interval Type-2 fuzzy adaptive tracking control design for PMDC motor with the sector dead-zones. Inf. Sci. 2014, 288, 108–134. [Google Scholar] [CrossRef]
- Maldonado, Y.; Castillo, O. Genetic Design of an Interval Type-2 Fuzzy Controller for Velocity Regulation in a DC motor. Int. J. Adv. Robot. Syst. 2012, 9. [Google Scholar] [CrossRef]
- Maldonado, Y.; Castillo, O.; Melin, P. A multi-objective optimization of Type-2 fuzzy control speed in FPGAs. Appl. Soft Comput. 2014, 24, 1164–1174. [Google Scholar] [CrossRef]
- Wang, T.; Tong, S. Direct inverse control of cable-driven parallel system based on Type-2 fuzzy systems. Inf. Sci. 2015, 310, 1–15. [Google Scholar] [CrossRef]
- Martínez, J.S.; John, R.I.; Hissel, D.; Péra, M.-C. A survey-based Type-2 fuzzy logic system for energy management in hybrid electrical vehicles. Inf. Sci. 2012, 190, 192–207. [Google Scholar] [CrossRef]
- Martínez, J.S.; Mulot, J.; Harel, F.; Hissel, D.; Péra, M.-C.; John, R.I.; Amiet, M. Experimental validation of a Type-2 fuzzy logic controller for energy management in hybrid electrical vehicles. Eng. Appl. Artif. Intell. 2013, 26, 1772–1779. [Google Scholar] [CrossRef]
- Nechadi, E.; Harmas, M.N.; Hamzaoui, A.; Essounbouli, N. Type-2 fuzzy based adaptive synergetic power system control. Electr. Power Syst. Res. 2012, 88, 9–15. [Google Scholar] [CrossRef]
- Tripathy, M.; Mishra, S. Interval Type-2-based thyristor controlled series capacitor to improve power system stability. IET Gener. Transm. Distrib. 2011, 5, 209–222. [Google Scholar] [CrossRef]
- Panda, M.K.; Pillai, G.; Kumar, V. An interval Type-2 fuzzy logic controller for TCSC to improve the damping of power system oscillations. Front. Energy 2013, 7, 307–316. [Google Scholar] [CrossRef]
- Panda, M.K.; Pillai, G.N.; Kumar, V. Design of an Interval Type-2 Fuzzy Logic Controller for Automatic Voltage Regulator System. Electr. Power Compon. Syst. 2012, 40, 219–235. [Google Scholar] [CrossRef]
- Sudha, K.R.; Santhi, R.V. Robust decentralized load frequency control of interconnected power system with Generation Rate Constraint using Type-2 fuzzy approach. Int. J. Electr. Power Energy Syst. 2011, 33, 699–707. [Google Scholar] [CrossRef]
- Lu, J.-J.; Huang, H.-H.; Chou, H.-P. Evaluation of an FPGA-based fuzzy logic control of feed-water for ABWR under automatic power regulating. Prog. Nucl. Energy 2015, 79, 22–31. [Google Scholar] [CrossRef]
- Kumar, M.; Panda, M.K.; Kundu, S.; Kumar, V. Designing of an Interval Type-2 Fuzzy Logic Controller for Magnetic Levitation System with Reduced Rule base. In Proceedings of the Computing Communication & Networking Technologies (ICCCNT), Coimbatore, India, 26–28 July 2012.
- Altin, N. Interval Type-2 Fuzzy Logic Controller Based Maximum Power Point Tracking in Photovoltaic Systems. Adv. Electr. Comput. Eng. 2013, 13, 65–70. [Google Scholar] [CrossRef]
- Altin, N. Single Phase Grid Interactive PV System With MPPT Capability Based on Type-2 Fuzzy Logic Systems. In Proceedings of the International Conference on Renewable Energy Research and Applications, Nagasaki, Japan, 11–14 November 2012.
- Yang, T.-C.; Juang, J.-G. Application of Adaptive Type-2 Fuzzy CMAC to Automatic Landing System. In Proceedings of the International Symposium on Computational Intelligence and Design, Hangzhou, China, 29–31 October 2010.
- Yang, F.; Yuan, R.; Yi, J.; Fan, G.; Tan, X. Direct adaptive Type-2 fuzzy neural network control for a generic hypersonic flight vehicle. Soft Comput. 2013, 17, 2053–2064. [Google Scholar] [CrossRef]
- Chen, X.; Li, D.; Xu, Z.; Bai, Y. Gain adaptive sliding mode controller based on interval type-II fuzzy neural network designed for attitude control for micro aircraft vehicle. Int. J. Intell. Comput. Cybern. 2008, 7, 209–226. [Google Scholar] [CrossRef]
- Chen, X.; Li, D.; Xu, Z.; Bai, Y. Robust control of quadrotor MAV using self-organizing interval type-II fuzzy neural networks (SOIT-IIFNNs) controller. Int. J. Intell. Comput. Cybern. 2011, 4, 397–412. [Google Scholar] [CrossRef]
- Lin, T.-C.; Liu, H.-L.; Kuo, M.-J. Direct adaptive interval Type-2 fuzzy control of multivariable nonlinear systems. Eng. Appl. Artif. Intell. 2009, 22, 420–430. [Google Scholar] [CrossRef]
- Hwang, J.-H.; Kwak, H.-J.; Park, G.-T. Adaptive interval Type-2 fuzzy sliding mode control for unknown chaotic system. Nonlinear Dyn. 2011, 63, 491–502. [Google Scholar] [CrossRef]
- El-Bardini, M.; El-Nagar, A.M. Interval Type-2 fuzzy PID controller for uncertain nonlinear inverted pendulum system. ISA Trans. 2014, 53, 732–743. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.-C. Observer-based robust adaptive interval Type-2 fuzzy tracking control of multivariable nonlinear systems. Eng. Appl. Artif. Intell. 2010, 23, 386–399. [Google Scholar] [CrossRef]
- Li, H.; Sun, X.; Shi, P.; Lam, H.-K. Control design of interval Type-2 fuzzy systems with actuator fault: Sampled-data control approach. Inf. Sci. 2015, 302, 1–13. [Google Scholar] [CrossRef]
- Khanesar, M.A.; Kayacam, E. Fuzzy Neural Networks for Real Time Control Applications: Concepts, Modeling and Algorithms for Fast Learning; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Wu, D. Interval Type-2 Fuzzy PI Controllers: Why They are More Robust. In Proceedings of the International Conference on Granular Computing, Silicon Valley, CA, USA, 14–16 August 2010.
- Castillo, O.; Melin, P. A review on interval Type-2 fuzzy logic applications in intelligent control. Inf. Sci. 2014, 279, 615–631. [Google Scholar] [CrossRef]
- Shill, P.C.; Amin, M.F.; Akhand, M.A.H.; Murase, K. Optimization of Interval Type-2 Fuzzy Logic Controller Using Quantum Genetic Algorithms. In Proceedings of the IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Brisbane, Australia, 10–15 June 2012.
- Wagner, C.; Hagras, H. zSlices based General Type-2 FLC for the Control of Autonomous Mobile Robots in Real World Environments. In Proceedings of the IEEE International Conference on Fuzzy Systems, Jeju Island, Korea, 20–24 August 2009.

© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tai, K.; El-Sayed, A.-R.; Biglarbegian, M.; Gonzalez, C.I.; Castillo, O.; Mahmud, S. Review of Recent Type-2 Fuzzy Controller Applications. Algorithms 2016, 9, 39. https://doi.org/10.3390/a9020039
Tai K, El-Sayed A-R, Biglarbegian M, Gonzalez CI, Castillo O, Mahmud S. Review of Recent Type-2 Fuzzy Controller Applications. Algorithms. 2016; 9(2):39. https://doi.org/10.3390/a9020039
Chicago/Turabian StyleTai, Kevin, Abdul-Rahman El-Sayed, Mohammad Biglarbegian, Claudia I. Gonzalez, Oscar Castillo, and Shohel Mahmud. 2016. "Review of Recent Type-2 Fuzzy Controller Applications" Algorithms 9, no. 2: 39. https://doi.org/10.3390/a9020039
APA StyleTai, K., El-Sayed, A.-R., Biglarbegian, M., Gonzalez, C. I., Castillo, O., & Mahmud, S. (2016). Review of Recent Type-2 Fuzzy Controller Applications. Algorithms, 9(2), 39. https://doi.org/10.3390/a9020039