
Cross-Coupled Contouring Control of Multi-DOF Robotic Manipulator

Abstract
:1. Introduction
2. Dynamic Model and New Cross-Coupled Control Law
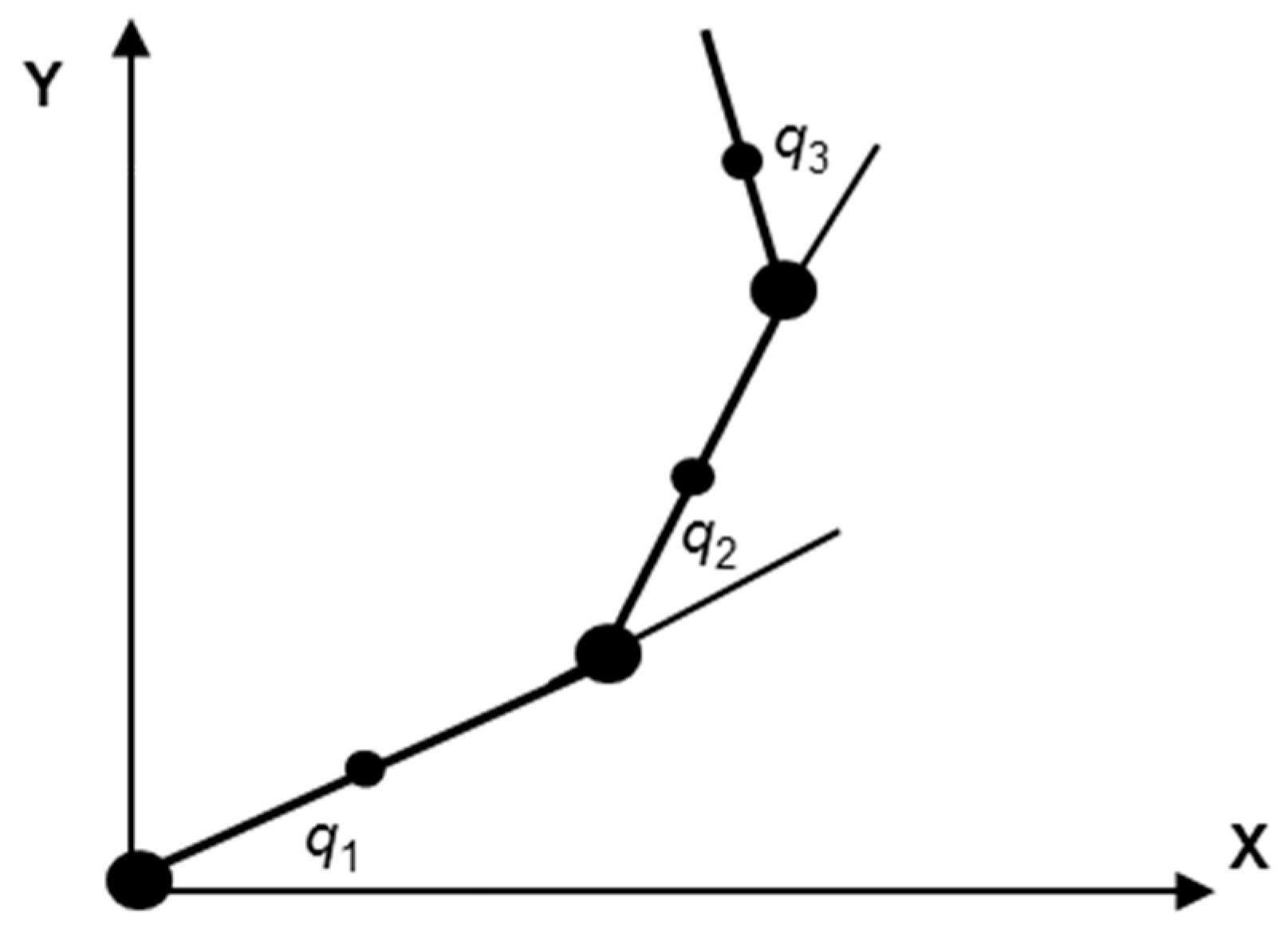
2.1. Dynamic Model of Robotic Manipulator
- (P1)
- The inertia matrix is symmetric positive definite.
- (P2)
- The matrix is a skew symmetric matrix, i.e.,
- (P3)
- The matrix satisfieswhere x, y, and z are velocity vectors.
- (P4)
- , , , and are bounded.
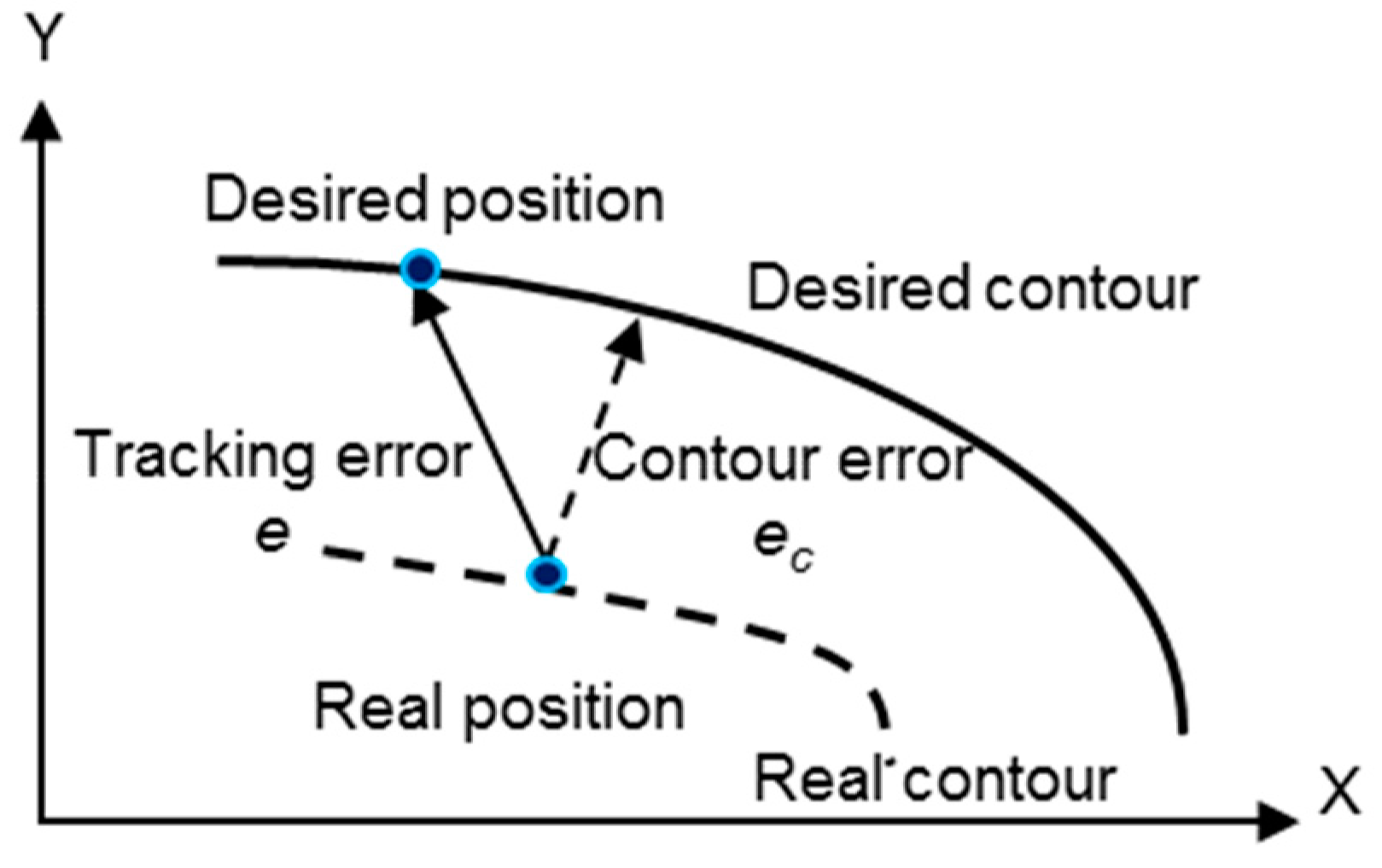
2.2. Contour Error of End-Effector
2.3. Equivalent Tracking Error of Contour Error
2.4. Cross-Coupled Contouring Controller
3. Stability Analysis
- (P5)
- If , then ; If , then .
- (P6)
- If and , then , , and .
Proof of Stability of CC-PD Controller
4. Simulation Verification and Discussion
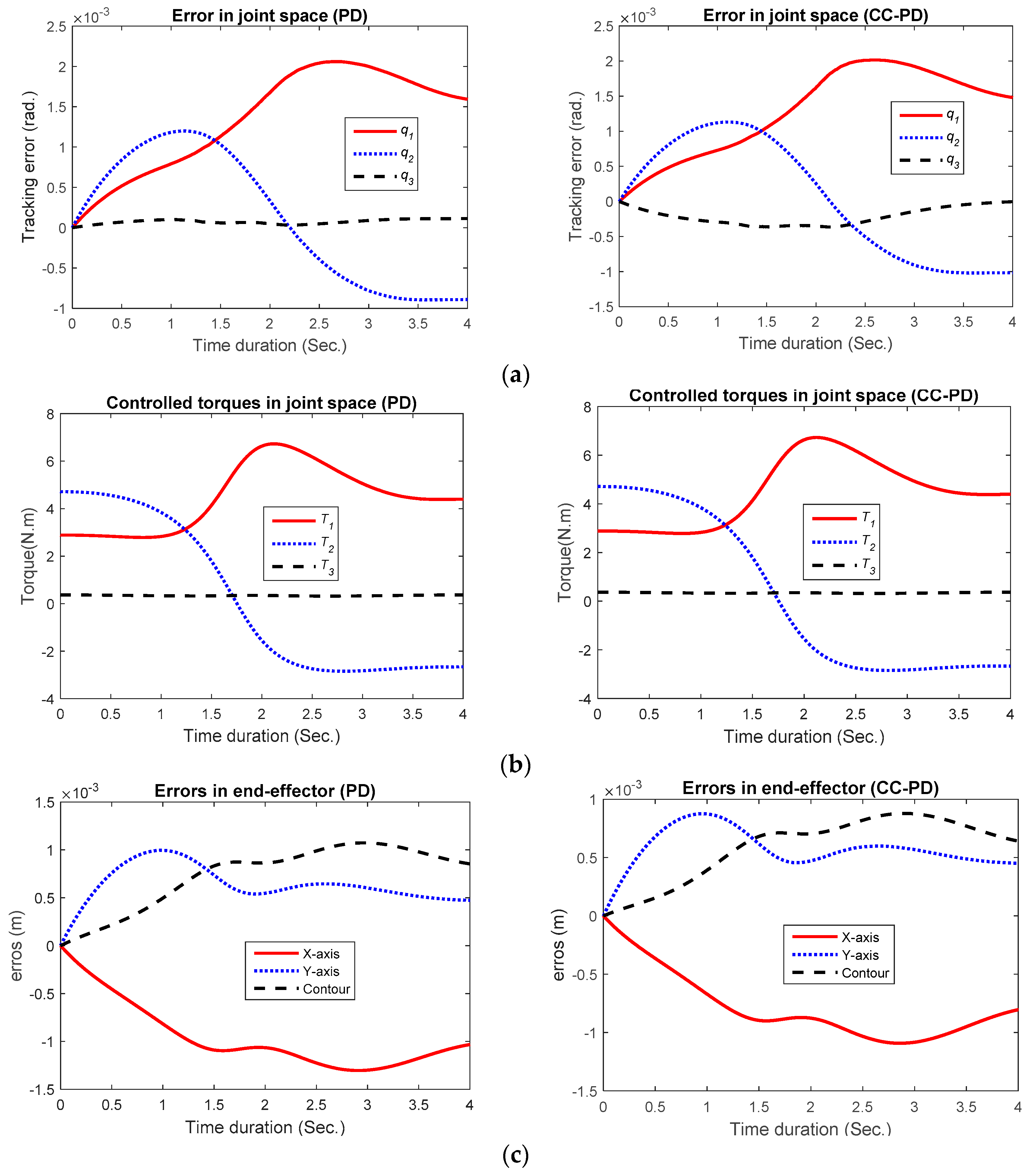
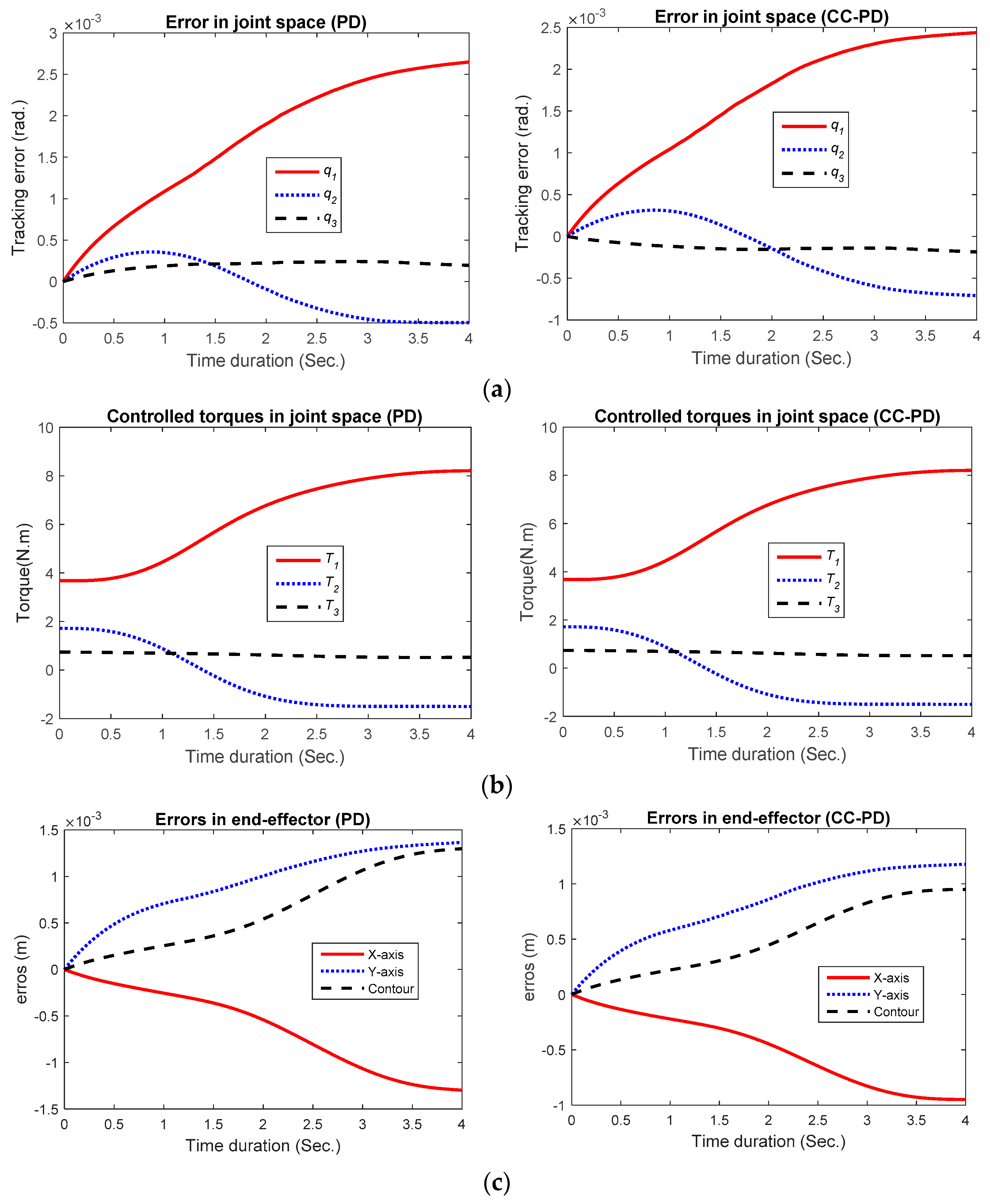
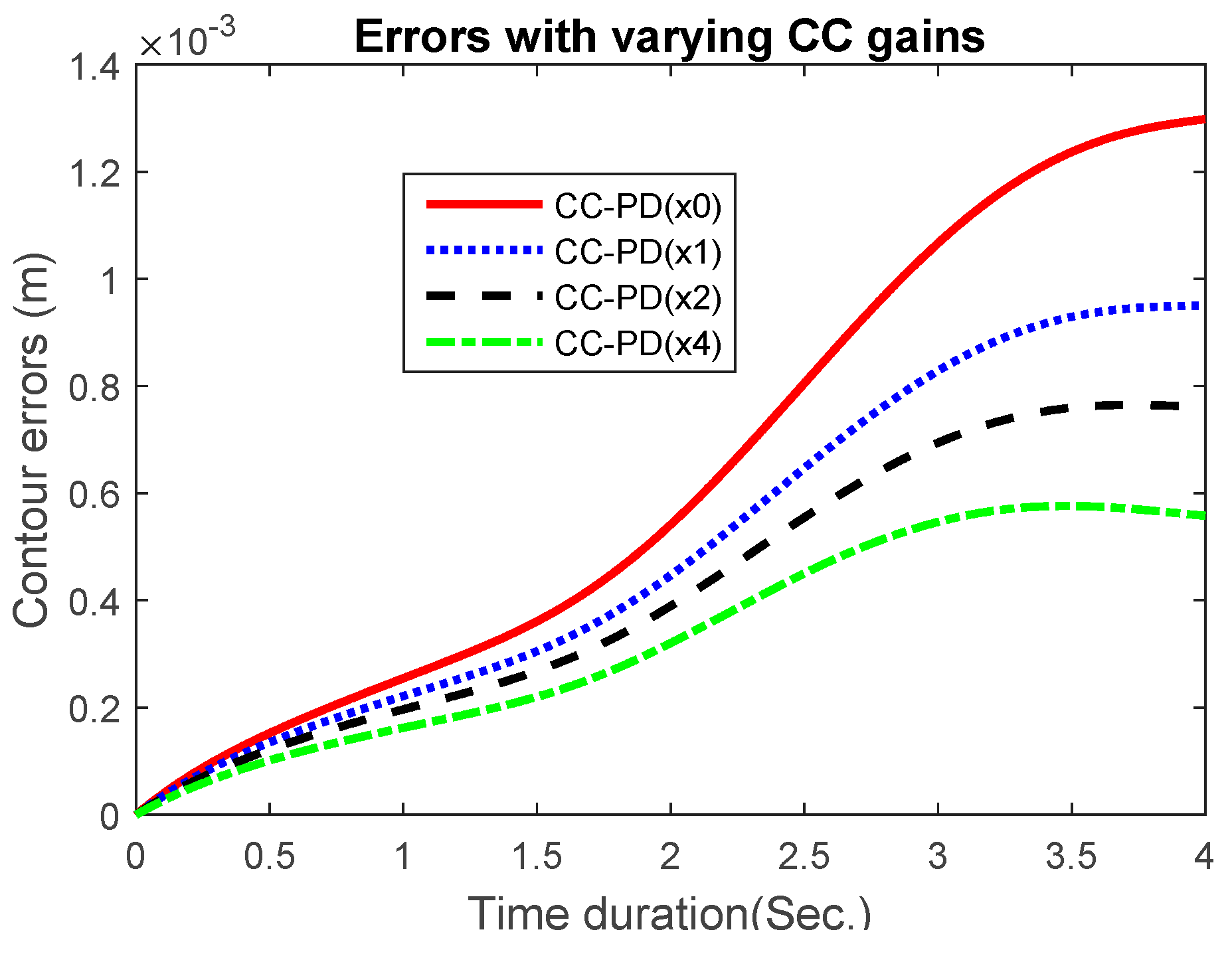
4.1. Linear Motion Contour Tracking
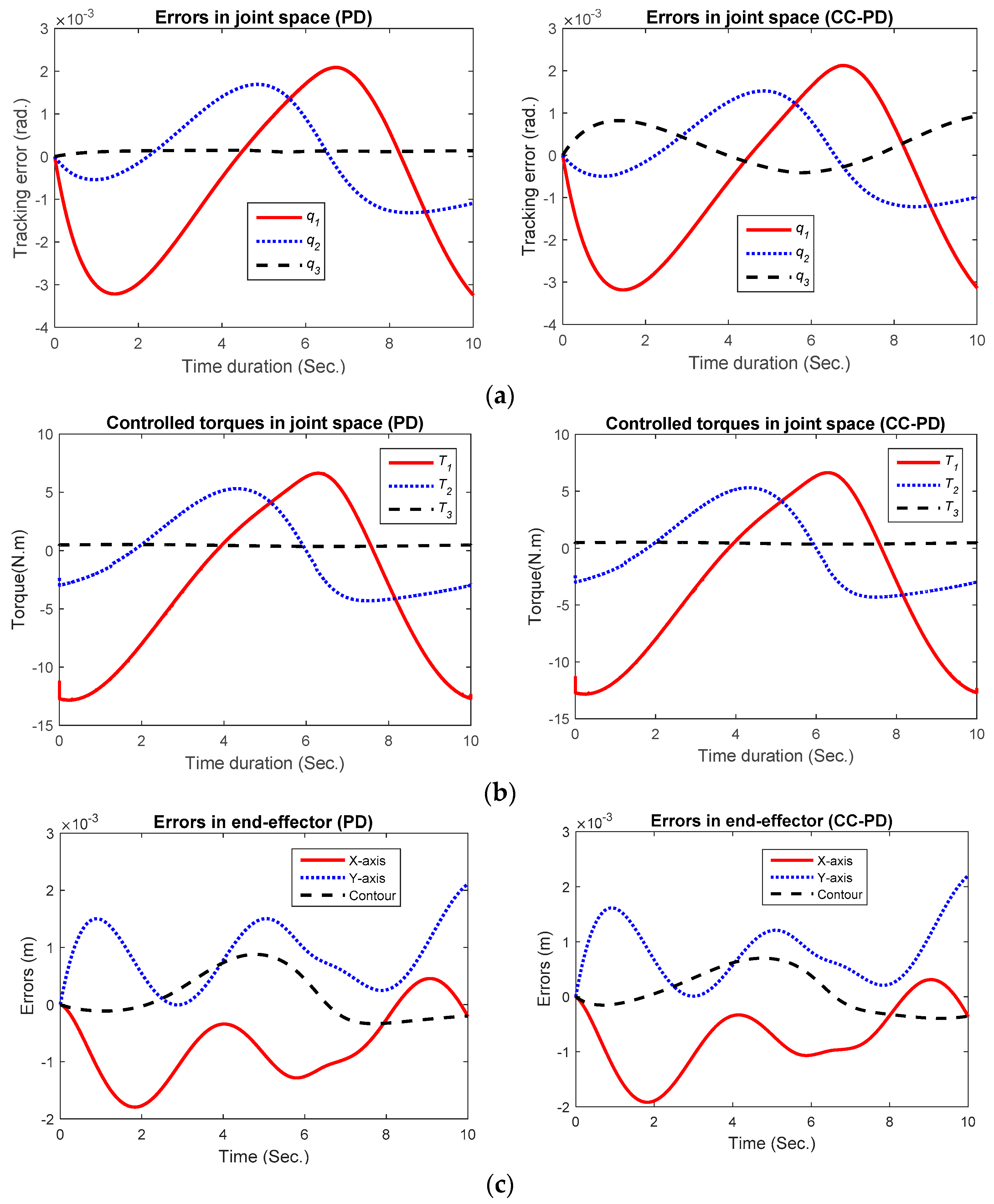
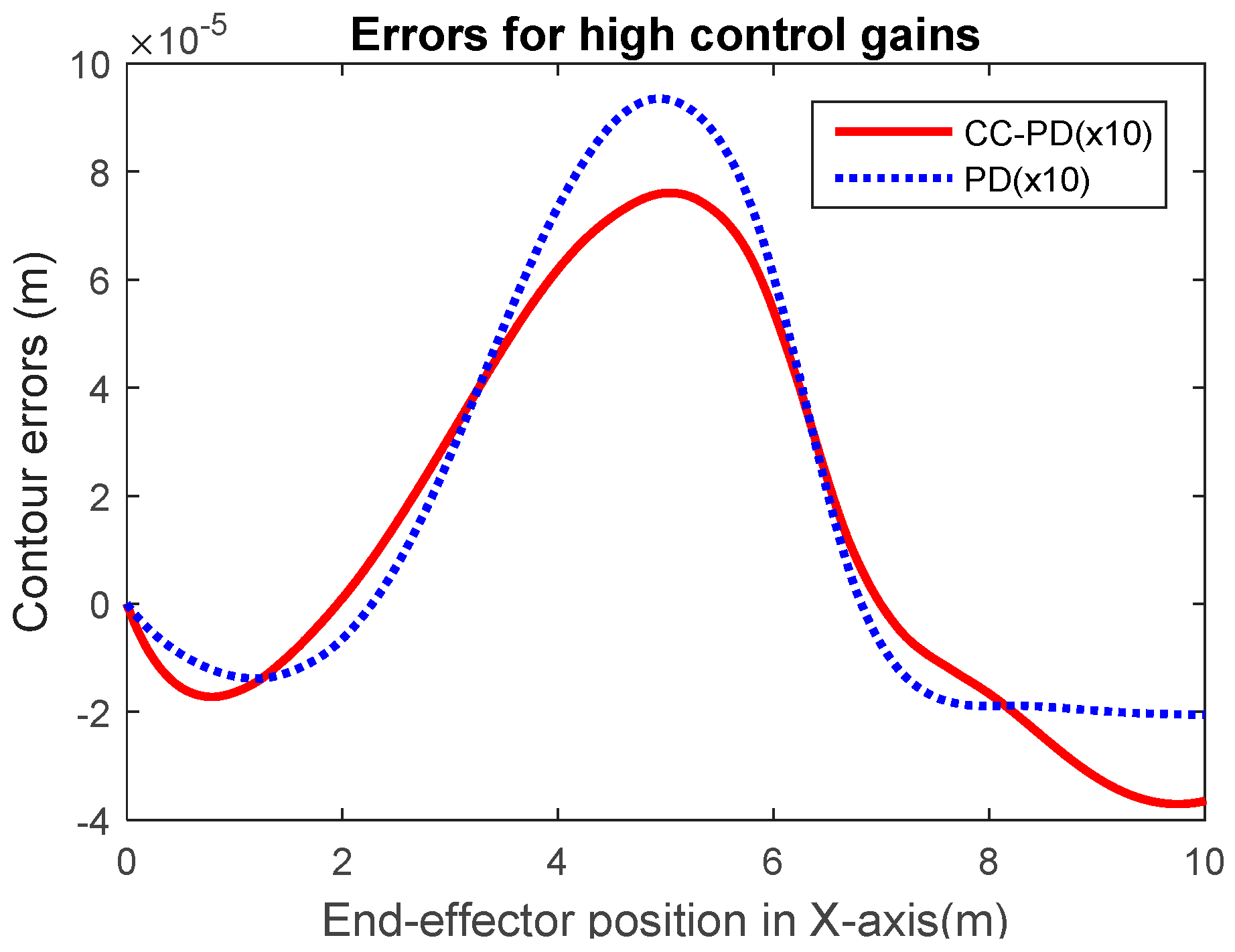
4.2. Circular Contour Tracking
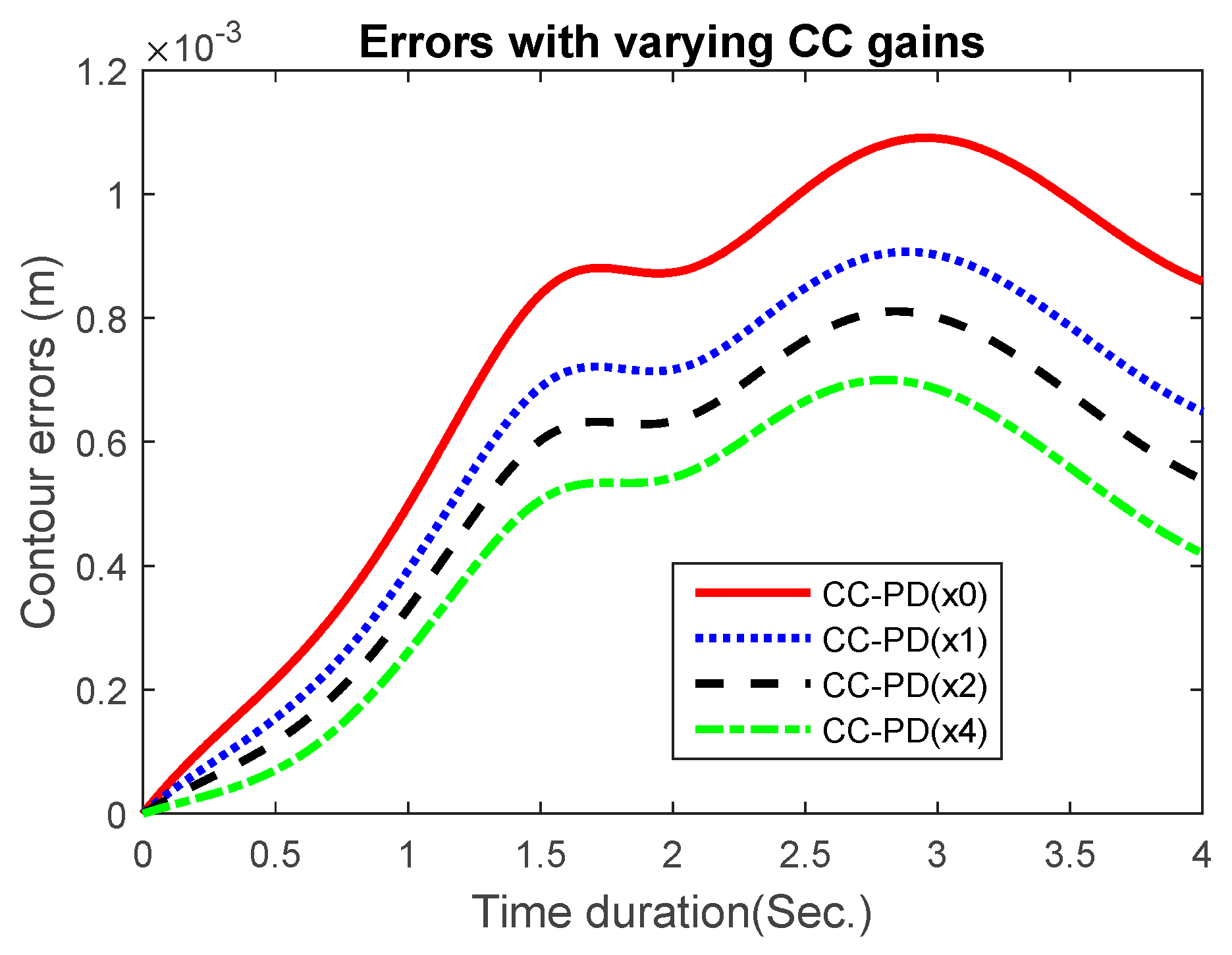
4.3. Discussions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Koren, Y. Cross-coupled biaxial computer controls for manufacturing systems. ASME J. Dyn. Syst. Meas. Control 1980, 102, 265–272. [Google Scholar] [CrossRef]
- Koren, Y.; Lo, C.C. Variable-gain cross-coupling controller for contouring. CIRP Ann. Manuf. Technol. 1991, 40, 371–374. [Google Scholar] [CrossRef]
- Shih, Y.Y.; Chen, C.S.; Lee, A.C. A novel cross-coupling control design for bi-axis motion. Int. J. Mach. Tools Manuf. 2002, 42, 1539–1548. [Google Scholar] [CrossRef]
- Yang, J.Z.; Li, Z.X. A novel contour error estimation for position loop-based cross-coupled control. IEEE/ASME Trans. Mechatron. 2011, 16, 643–655. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Su, K.H.; Wang, S.F. Contour error reduction for free-form contour following tasks of biaxial motion control systems. Robot. Comput. Integr. Manuf. 2009, 25, 323–333. [Google Scholar] [CrossRef]
- Ramesh, R.; Mannan, M.A.; Poo, A.N. Tracking and contour error control in CNC servo systems. Int. J. Mach. Tools Manuf. 2005, 45, 301–326. [Google Scholar] [CrossRef]
- Tang, L.; Landes, R.G. Multiaxis contour control—The state of the art. IEEE Trans. Control Syst. Technol. 2013, 21, 1997–2010. [Google Scholar] [CrossRef]
- El Khalick, A.; Uchiyama, M.N. Contouring controller design based on iterative contour error estimation for three-dimensional machining. Robot. Comput. Integr. Manuf. 2011, 27, 802–807. [Google Scholar] [CrossRef]
- Chen, C.S.; Chen, L.Y. Cross-coupling position command control in a multi-axis motion system. Mechatronics 2011, 21, 625–632. [Google Scholar] [CrossRef]
- Cheah, C.C. Task-space PD control of robot manipulators: Unified analysis and duality property. Int. J. Robot. Res. 2008, 27, 1152–1170. [Google Scholar] [CrossRef]
- Cheah, C.C.; Liu, C.; Slotine, J.J.E. Adaptive tracking control for robots with unknown kinematic and dynamic properties. Int. J. Robot. Res. 2006, 25, 283–296. [Google Scholar] [CrossRef]
- Chen, S.; Wu, K. Contouring control of smooth paths for multiaxis motion systems based on equivalent errors. IEEE Trans. Control Syst. Technol. 2007, 1, 1151–1158. [Google Scholar] [CrossRef]
- Chen, S.L.; Li, H.L.; Ting, S.C. Contouring control of biaxial systems based on polar coordinates. IEEE/ASME Trans. Mechatron. 2002, 7, 329–345. [Google Scholar] [CrossRef]
- Yao, B.; Hu, C.X.; Wang, Q.F. An orthogonal global task coordinate frame for contouring control of biaxial systems. IEEE/ASME Trans. Mechatron. 2012, 17, 622–634. [Google Scholar]
- Lee, J.H.; Dixon, W.E.; Ziegert, J.C. Adaptive nonlinear contour coupling control for a machine tool system. Int. J. Adv. Manuf. Technol. 2012, 61, 1057–1065. [Google Scholar] [CrossRef]
- Fang, R.W.; Chen, J.S. A cross-coupling controller using an H∞ scheme and its application to a two-axis direct-drive robot. J. Robot. Syst. 2002, 19, 483–497. [Google Scholar] [CrossRef]
- Chen, C.L.; Wu, T.C.; Peng, C.C. Robust trajectories following control of a 2-link robot manipulator via coordinate transformation for manufacturing applications. Robot. Comput. Integr. Manuf. 2011, 27, 569–580. [Google Scholar] [CrossRef]
- Fang, R.W.; Chen, J.S. Cross-coupling control for a direct-drive robot. JSME Int. J. Ser. C Mech. Syst. Mach. Elem. Manuf. 2002, 45, 749–757. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Hu, Y.Q.; Yue, W.H.; Liu, D.S. Cross coupling contour tracking of multi-DOF robot. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014; pp. 1463–1468.
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Addison-Wesley: Reading, MA, USA, 1986. [Google Scholar]
- Arendt, W.; Schleich, W.P. Mathematical Analysis of Evolution, Information, and Complexity; Wiley-VCH: Weinheim, Germany, 2009. [Google Scholar]
- Slotine, J.J.E.; Li, W.P. Applied Nonlinear Control; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Ouyang, P.R.; Pano, V.; Acob, J. Position domain synchronization control of multi-degrees of freedom of robotic manipulator. Trans. ASME J. Dyn. Syst. Meas. Control 2014, 136. [Google Scholar] [CrossRef]
- Lynch, K.M.; Shiroma, N.; Arai, H.; Tanie, K. Collision-free trajectory planning for a 3-DOF robot with a passive joint. Int. J. Robot. Res. 2000, 19, 1171–1184. [Google Scholar] [CrossRef]
- Bittencourt, A.C.; Gunnarson, S. Static friction in a robot joint—Modeling and identification of load and temperature effects. Trans. ASME J. Dyn. Syst. Meas. Control 2012, 134. [Google Scholar] [CrossRef]
- Hassan, R.; Cohanim, B.; De Weck, O.; Venter, G. A comparison of particle swarm optimization and the genetic algorithm. AIAA/ASME/ASCE/AHS/ASC Struct. Struct. Dyn. Mater. Conf. 2005, 2, 1138–1150. [Google Scholar]
- Ouyang, P.R.; Pano, V. Comparative study of DE, PSO and GA for position domain PID controller tuning. Algorithms 2015, 8, 697–711. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Lee, C.C. Motion controller design for contour-following tasks based on real-time contour error estimation. IEEE Trans. Ind. Electron. 2007, 54, 1686–1695. [Google Scholar] [CrossRef]
- Wu, J.H.; Xiong, Z.H.; Ding, H. Integral design of contour error model and control for biaxial system. Int. J. Mach. Tools Manuf. 2015, 89, 159–169. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Pano, V.; Acob, J. Position domain contour control for multi-dof robotic system. Mechatron. 2013, 23, 1061–1071. [Google Scholar] [CrossRef]
- Ouyang, P.R.; Pano, V.; Dam, T. PID position domain control for contour tracking. Int. J. Syst. Sci. 2015, 46, 111–124. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i | Mass mi (kg) | Length li (m) | Mass Center ri (m) | Inertia Ii (kg∙m2) |
|---|---|---|---|---|
| 1 | 1.0 | 0.50 | 0.25 | 0.10 |
| 2 | 1.0 | 0.50 | 0.25 | 0.10 |
| 3 | 0.5 | 0.30 | 0.15 | 0.05 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, P.; Hu, Y.; Yue, W.; Liu, D. Cross-Coupled Contouring Control of Multi-DOF Robotic Manipulator. Algorithms 2016, 9, 81. https://doi.org/10.3390/a9040081
Ouyang P, Hu Y, Yue W, Liu D. Cross-Coupled Contouring Control of Multi-DOF Robotic Manipulator. Algorithms. 2016; 9(4):81. https://doi.org/10.3390/a9040081
Chicago/Turabian StyleOuyang, Puren, Yuqi Hu, Wenhui Yue, and Deshun Liu. 2016. "Cross-Coupled Contouring Control of Multi-DOF Robotic Manipulator" Algorithms 9, no. 4: 81. https://doi.org/10.3390/a9040081
APA StyleOuyang, P., Hu, Y., Yue, W., & Liu, D. (2016). Cross-Coupled Contouring Control of Multi-DOF Robotic Manipulator. Algorithms, 9(4), 81. https://doi.org/10.3390/a9040081