
The Tracking and Frequency Measurement of the Sway of Leafless Deciduous Trees by Adaptive Tracking Window Based on MOSSE


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
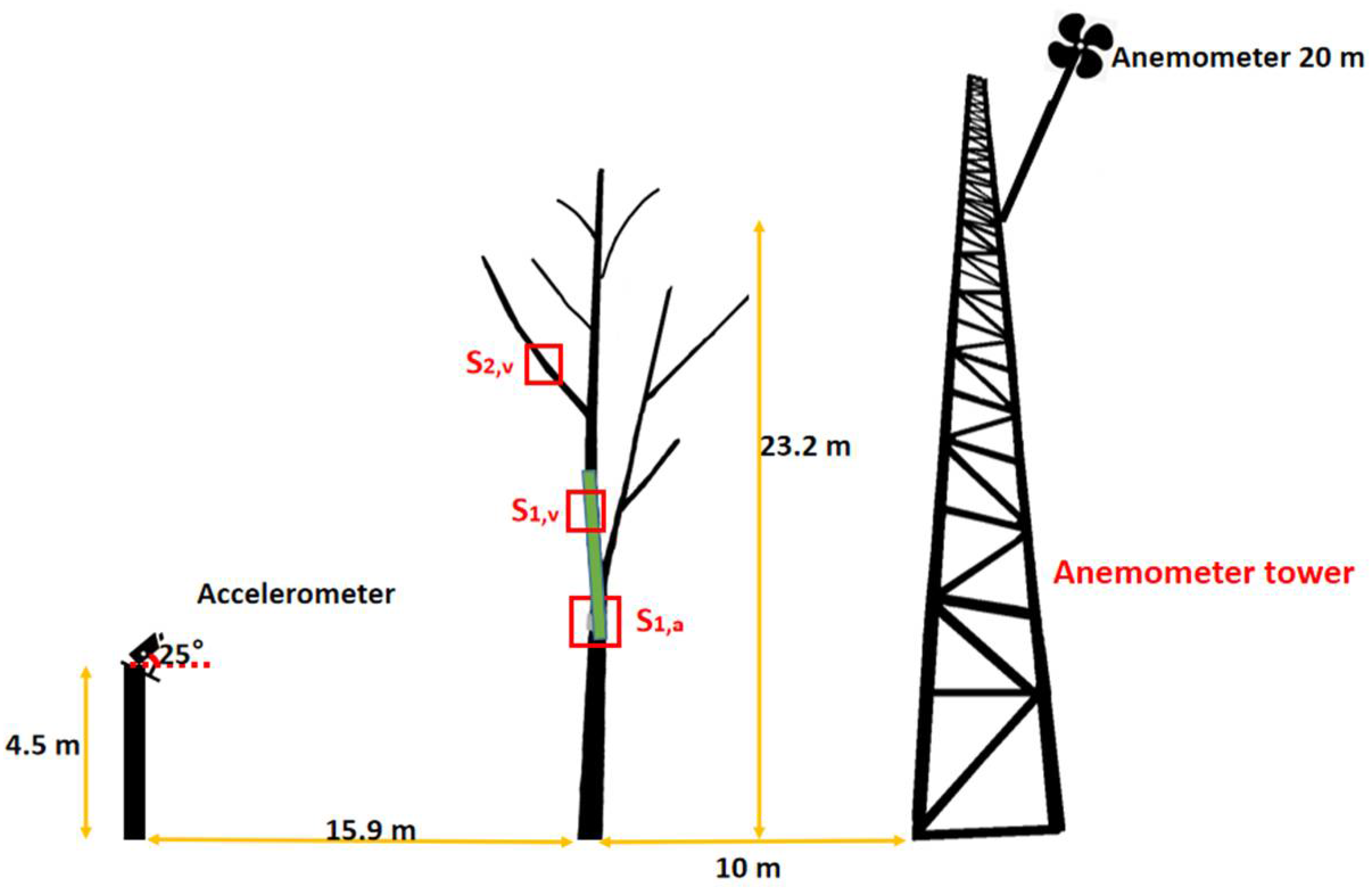
2.1. Data Acquisition and Test System
2.2. Method for Tracking and Frequency Measurement of Tree Sway
2.2.1. Minimum Output Sum of Squared Error Filter (MOSSE)
2.2.2. Tracking Algorithm Based on MOSSE
2.2.3. Adaptive Construction of Trace Window
2.2.4. Method for Measuring Tree Sway Frequency
2.2.5. Method Flow
3. Results
3.1. Wind Speed
3.2. Coordinate Change of Target Feature Points along the x Axis in Videos
3.3. The Velocity of the Feature Point along the x Axis in the Videos
3.4. Comparison of Frequency Measured by a Video and an Accelerometer
4. Discussion
5. Conclusions
- The video-based method can be used successfully for measuring tree sway frequency under field conditions. The fundamental sway frequency measured by the accelerometer is equal to the fundamental sway frequency measured by the video.
- The key to this method is the construction of an adaptive tracking window. The two problems owing to which tracking fails—tracking window being too small and tracking speed and measurement accuracy are reduced due to the tracking window being too large—is addressed with the adaptive tracking window. The instantaneous velocity of the tree is calculated, and the frequency response of the tree is obtained by using FFT for spectrum analysis of instantaneous velocity.
- The frequency identification method of trees is based on the tracking method based on MOSSE, which ensures that the method is robust and fast and can track tree sway for a long time. In addition, the installation of the equipment is simple; thus, the method has cost efficiency performance in frequency measurement.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Gardiner, B.; Blennow, K.; Carnus, J.-M.; Fleischer, P.; Ingemarson, F.; Landmann, G.; Lindner, M.; Marzano, M.; Nicoll, B.; Orazio, C.; et al. Destructive Storms in European Forests: Past and Forthcoming Impacts. Available online: https://ec.europa.eu/environment/forests/pdf/STORMS%20Final_Report.pdf (accessed on 19 June 2019).
- Schindler, D.; Mohr, M. Non-oscillatory response to wind loading dominates movement of Scots pine trees. Agric. For. Meteorol. 2018, 250–251, 209–216. [Google Scholar] [CrossRef]
- Bayat, M.; Ghorbanpour, M.; Zare, R.; Jaafari, A.; Pham, B.T. Application of Artificial Neural Networks for Predicting Tree Survival and Mortality in the Hyrcanian forest of Iran. Comput. Electron. Agric. 2019, 164, 104929. [Google Scholar] [CrossRef]
- Bayat, M.; Noi, P.T.; Zare, R.; Bui, D.T. A Semi-Empirical Approach Based on Genetic Programming for the Study of Biophysical Controls on Diameter-Growth of Fagus Orientalis in Northern Iran. Remote Sens. 2019, 11, 1680. [Google Scholar] [CrossRef] [Green Version]
- Bayat, M.; Bettinger, P.; Heidari, S.; Hamidi, S.K.; Jaafari, A. A Combination of Biotic and Abiotic Factors and Diversity Determine Productivity in Natural Deciduous Forests. Forests 2021, 12, 1450. [Google Scholar] [CrossRef]
- Bunce, A.; Volin, J.C.; Miller, D.R.; Parent, J.; Rudnicki, M. Determinants of tree sway frequency in temperate deciduous forests of the Northeast United States. Agric. For. Meteorol. 2019, 266–267, 87–96. [Google Scholar] [CrossRef] [Green Version]
- Lee, L.S.H.; Jim, C.Y. Applying precision triaxial accelerometer to monitor branch sway of an urban tree in a tropical cyclone. Landsc. Urban Plan. 2018, 178, 170–182. [Google Scholar] [CrossRef]
- Fraser, A.I. The soil and roots as factors in tree stability. Forestry 1962, 35, 117–127. [Google Scholar] [CrossRef]
- Schindler, D.; Kolbe, S. Assessment of the Response of a Scots Pine Tree to Effective Wind Loading. Forests 2020, 11, 145. [Google Scholar] [CrossRef] [Green Version]
- Nikolas, A.; Ebba, D.; Jakob, M. Wind load estimation on an open-grown European oak tree. For. Int. J. For. Res. 2019, 92, 381–392. [Google Scholar]
- Dupont, S.; Defossez, P.; Bonnefond, J.M. How stand tree motion impacts wind dynamics during windstorms. Agric. For. Meteorol. 2018, 262, 42–58. [Google Scholar] [CrossRef]
- Van Emmerik, T.; Steele-Dunne, S.; Hut, R.; Gentine, P.; Guerin, M.; Oliveira, R.S.; Wagner, J.; Selker, J.; Van de Giesen, N. Measuring Tree Properties and Responses Using Low-Cost Accelerometers. Sensors 2017, 17, 1098. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gougherty, A.V.; Keller, S.R.; Kruger, A.; Stylinski, C.D.; Elmore, A.J.; Fitzpatrick, M.C. Estimating tree phenology from high frequency tree movement data. Agric. For. Meteorol. 2018, 263, 217–224. [Google Scholar] [CrossRef]
- Castro-Garcia, S.; Aragon-Rodriguez, F.; Arias-Calderón, R.; Sola-Guirado, R.R.; Gil-Ribes, J.A. The contribution of fruit and leaves to the dynamic response of secondary branches of orange trees. Biosyst. Eng. 2020, 193, 149–156. [Google Scholar] [CrossRef]
- Roodbaraky, H.J.; Baker, C.J.; Dawson, A.R.; Wright, C.J. Experimental observations of the aerodynamic characteristics of urban trees. J. Wind. Eng. Ind. Aerodyn. 1994, 52, 171–184. [Google Scholar] [CrossRef]
- Schindler, D.; Mohr, M. No resonant response of Scots pine trees to wind excitation. Agric. For. Meteorol. 2019, 265, 227–244. [Google Scholar] [CrossRef]
- Baker, C.J. Measurements of the natural frequencies of trees. J. Exp. Bot. 1997, 48, 1125–1132. [Google Scholar] [CrossRef]
- Hassinen, A.; Lemettinen, M.; Peltola, H.; Kellomäki, S.; Gardiner, B. A prism-based system for monitoring the swaying of trees under wind loading. Agric. For. Meteorol. 1998, 90, 187–194. [Google Scholar] [CrossRef]
- Barbacci, A.; Diener, J.; Hémon, P.; Adam, B.; Donès, N.; Reveret, L.; Moulia, B. A robust videogrametric method for the velocimetry of wind-induced motion in trees. Agric. For. Meteorol. 2014, 184, 220–229. [Google Scholar] [CrossRef]
- Hu, S.; He, P.; He, D. Motion Capture and Estimation of Dynamic Properties for Realistic Tree Animation. In Next Generation Computer Animation Techniques; Springer International Publishing: New York, NY, USA, 2017; pp. 18–34. [Google Scholar]
- Lucas, B.D. An Iterative Image Registration Technique with an Application to Stereo Vision (DARPA). Proc. Ijcai. 1981, 3, 674–679. [Google Scholar]
- Bouguet, J.Y. Pyramidal Implementation of the Lucas Kanade Feature Tracker Description of the Algorithm; Intel Corporation Microprocessor Research Labs: Santa Clara, CA, USA, 2000. [Google Scholar]
- Diener, J.; Reveret, L.; Fiume, E. Hierarchical retargetting of 2D motion fields to the animation of 3D plant models. In Proceedings of the 2006 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA ’06), Vienna, Austria, 2–4 September 2006; pp. 187–195. [Google Scholar]
- Der Loughian, C.; Tadrist, L.; Allain, J.M.; Diener, J.; Moulia, B.; de Langre, E. Measuring local and global vibration modes in model plants. Comptes Rendus Mécanique 2014, 342, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Tomasi, C. Good features to track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition CVPR, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Xue, T.; Wu, J.; Zhang, Z.; Zhang, C.; Tenenbaum, J.B.; Freeman, W.T. Seeing Tree Structure from Vibration. Computer Vision. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 762–779. [Google Scholar]
- Nakata, M.T.; Takahara, M.; Sakamoto, S.; Yoshida, K.; Mitsuda, N. High-throughput analysis of Arabidopsis stem vibrations to identify mutants with altered mechanical properties. Front. Plant Sci. 2018, 9, 780. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Langre, E.; Penalver, O.; Hémon, P.; Frachisse, J.; Bogeat-Triboulot, M.; Niez, B.; Moulia, B. Nondestructive and fast vibration phenotyping of plants. Plant Phenomics 2019, 2019, 6379693. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 13–18. [Google Scholar]
- Liu, S.; Liu, D.; Srivastava, G.; Połap, D.; Woźniak, M. Overview and methods of correlation filter algorithms in object tracking. Complex Intell. Syst. 2021, 7, 1895–1917. [Google Scholar] [CrossRef]
- Chaudhary, S.; Dudhane, A.; Patil, P.W.; Murala, S.; Talbar, S. Motion estimation in hazy videos. Pattern Recognit. Lett. 2021, 150, 130–138. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, A.; Yang, X.; Xin, D. The Tracking and Frequency Measurement of the Sway of Leafless Deciduous Trees by Adaptive Tracking Window Based on MOSSE. Forests 2022, 13, 81. https://doi.org/10.3390/f13010081
Wang A, Yang X, Xin D. The Tracking and Frequency Measurement of the Sway of Leafless Deciduous Trees by Adaptive Tracking Window Based on MOSSE. Forests. 2022; 13(1):81. https://doi.org/10.3390/f13010081
Chicago/Turabian StyleWang, Achuan, Xinnian Yang, and Dabo Xin. 2022. "The Tracking and Frequency Measurement of the Sway of Leafless Deciduous Trees by Adaptive Tracking Window Based on MOSSE" Forests 13, no. 1: 81. https://doi.org/10.3390/f13010081