
An Event-Response Tree-Based Resource Scheduling Method for Wildfire Fighting


Abstract
:1. Introduction
2. Materials and Methods
2.1. System Abstraction
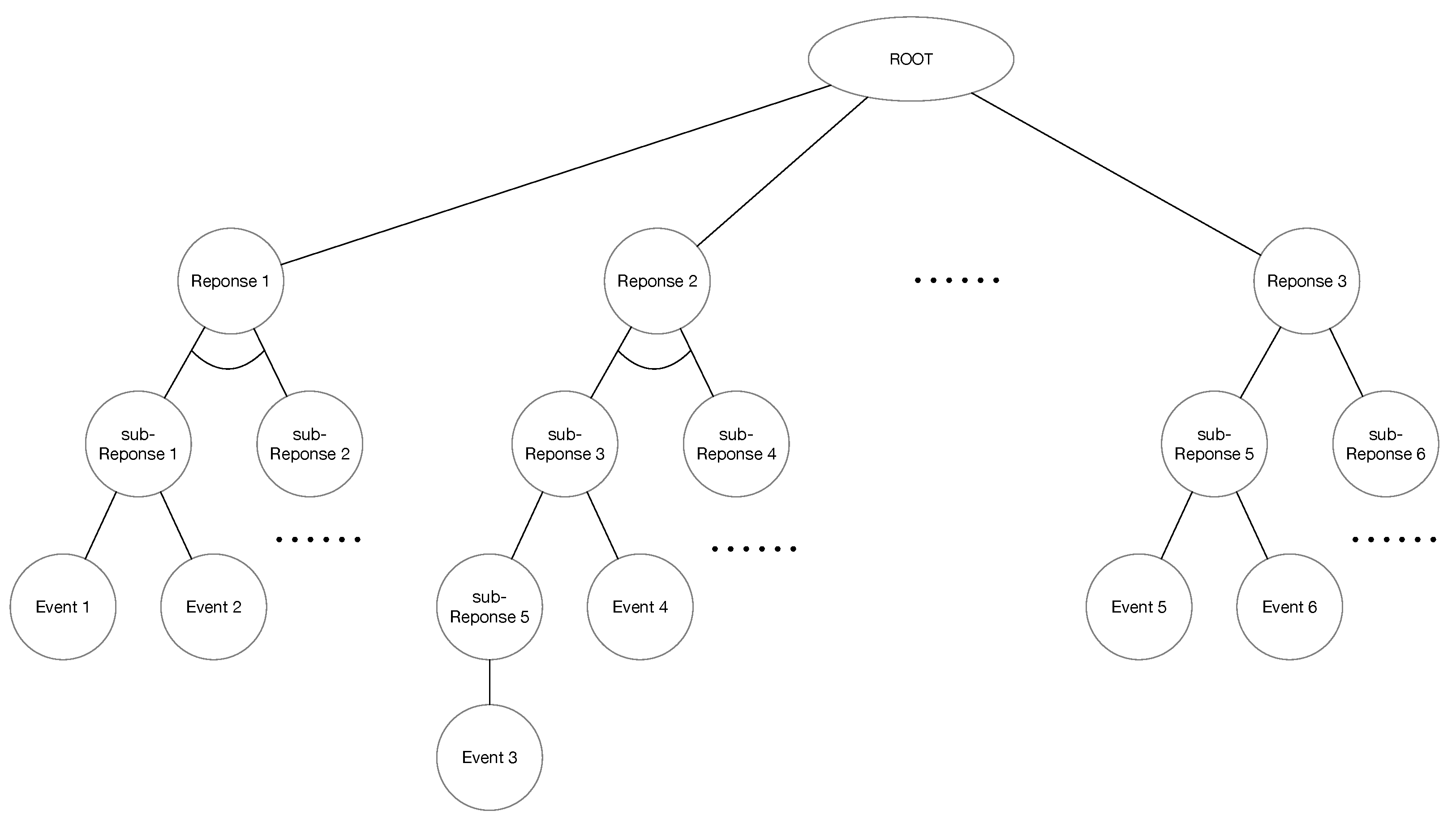
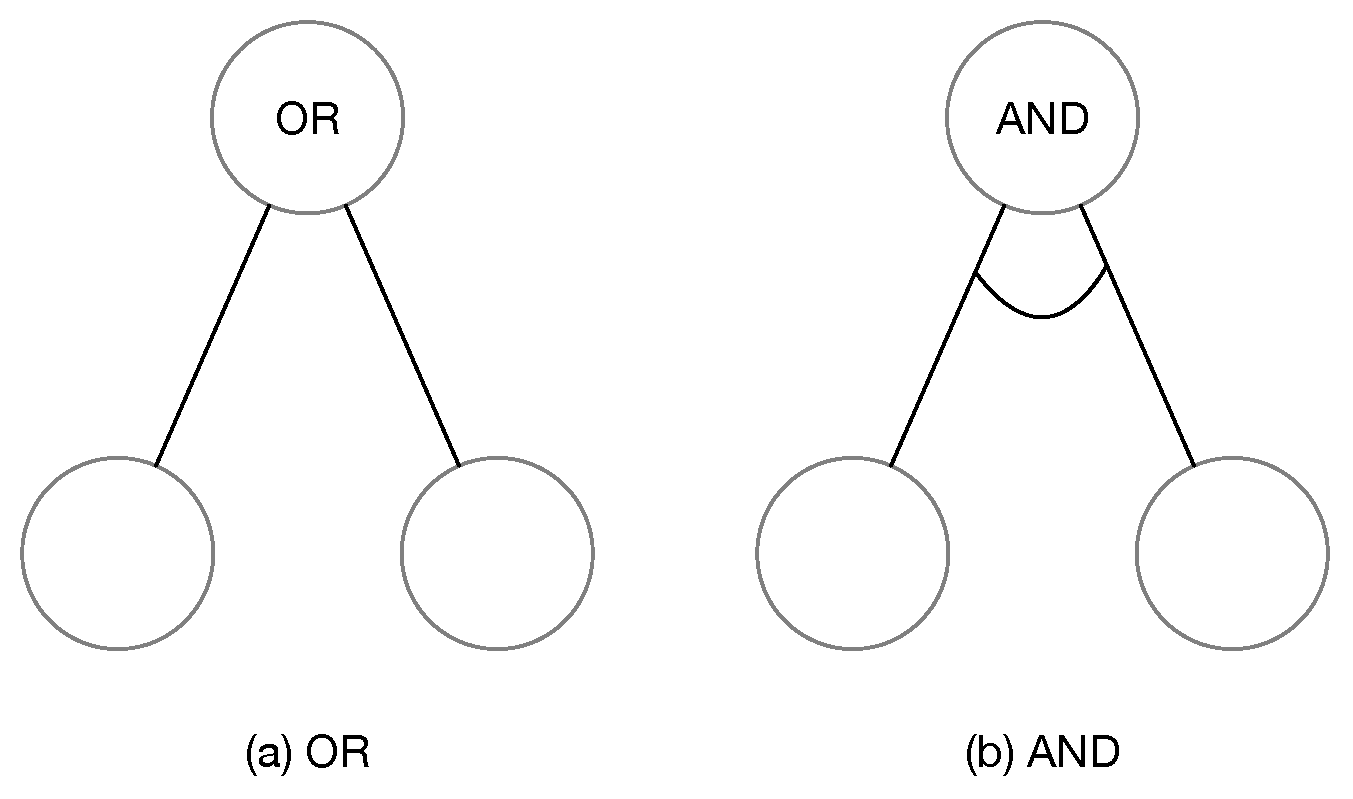
2.2. E-R Tree
- Root:
- The root node is the topmost node in the E-R tree data structure. It represents the target of resource scheduling.
- Response:
- The response node is the non-leaf node in the tree data structure, which is in the middle of the E-R tree data structure; it has more than 0 children, and it can be seen as a sub-step to reach the root node. The response node is composed of multiple event nodes or response nodes.
- Event:
- The event node is the leaf node in the tree data structure, which is the bottom node in the E-R tree data structure. It consists of indivisible resources, which do not have children.
2.3. Mixed-Integer Programming
2.4. Fire Suppression Index
3. Construction of the E-R Tree-Based Wildfire-Resource-Scheduling Model
3.1. Data Input
3.2. Modeling and Quantification
3.2.1. E-R Tree Construction
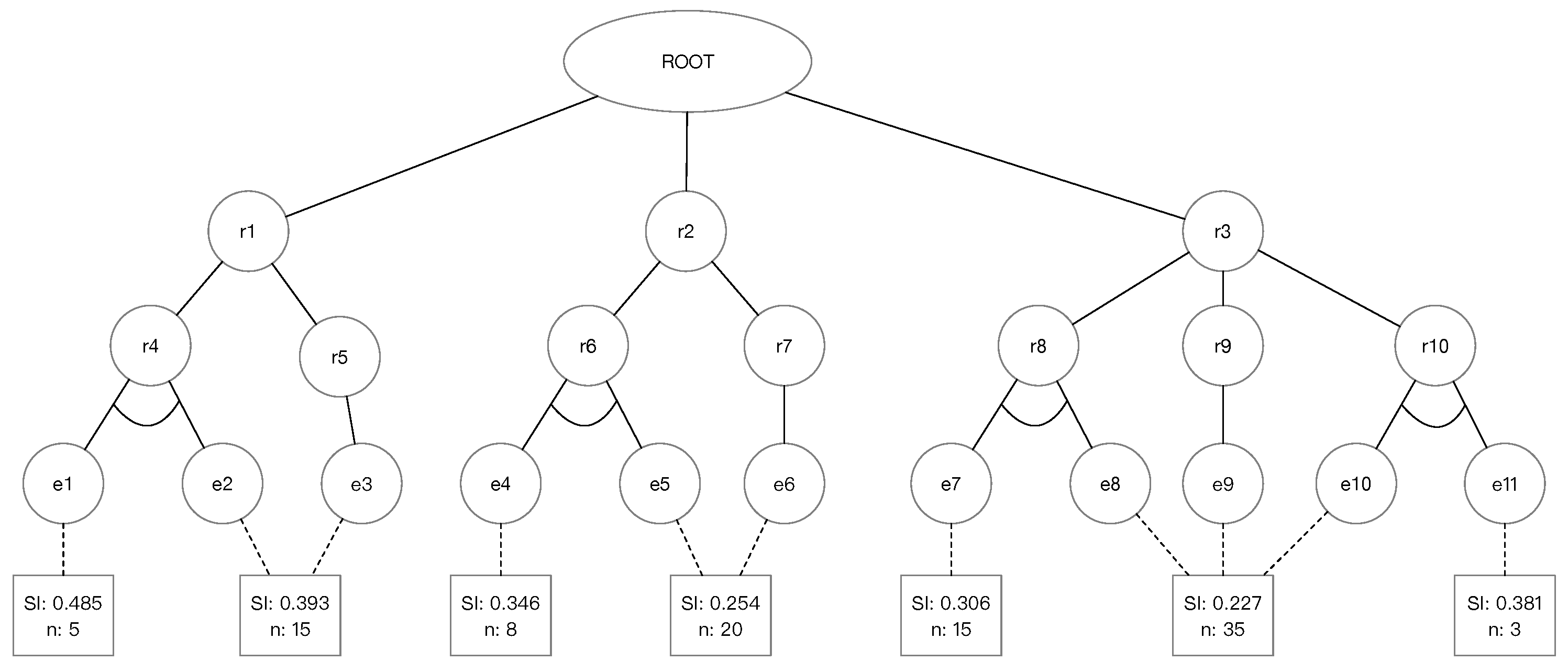
3.2.2. SI of E-R Tree
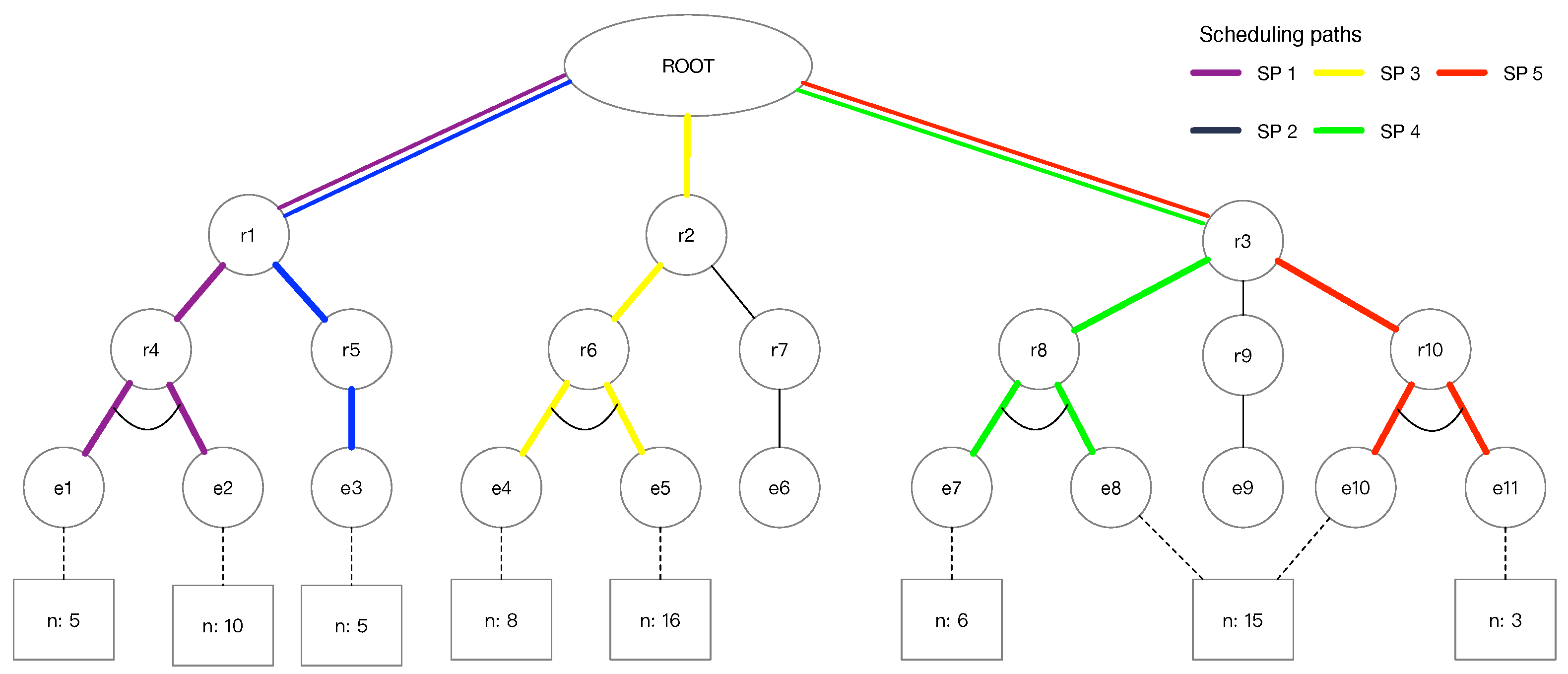
3.3. Scheduling Path
4. Results
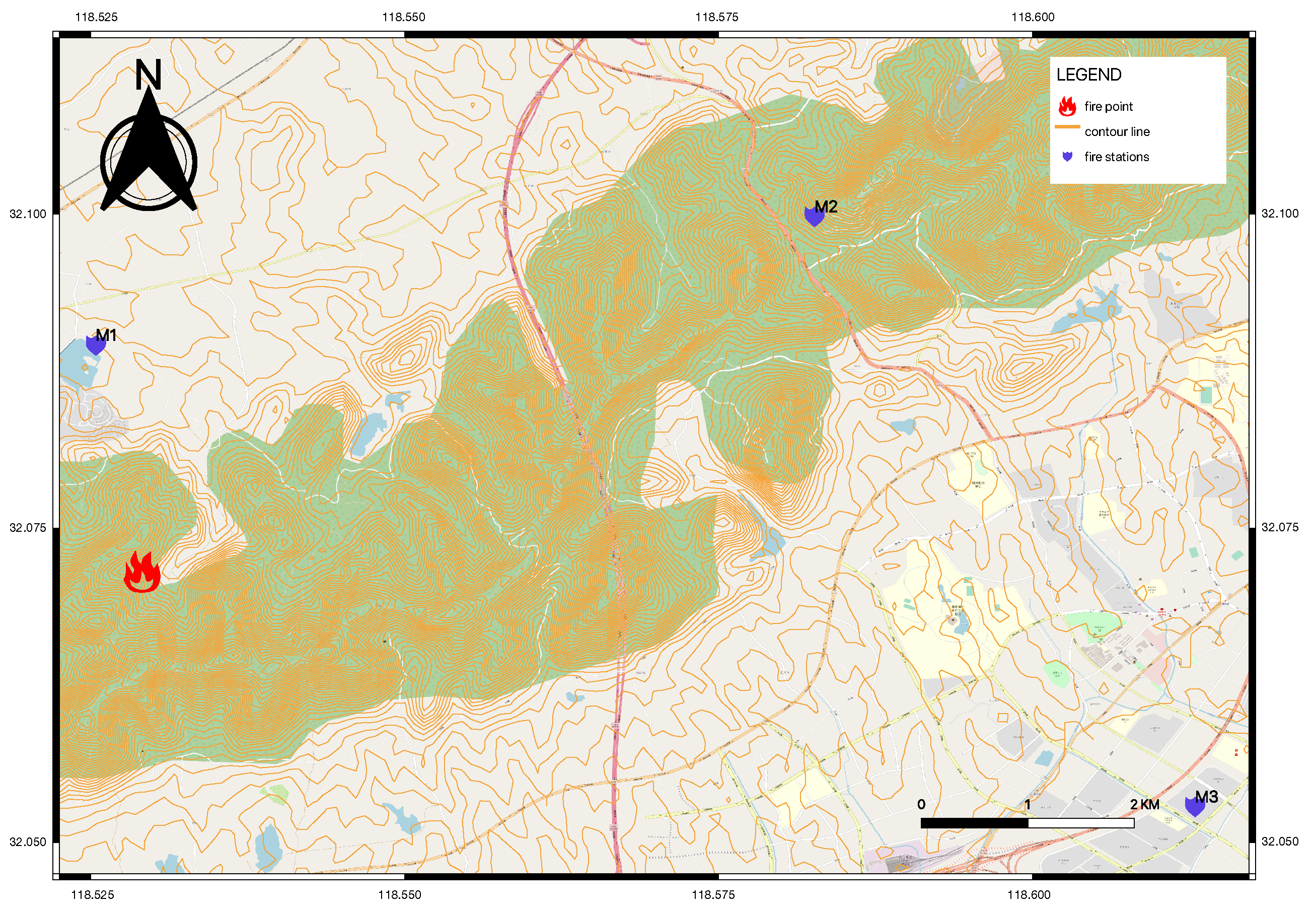
4.1. Scenario
4.2. Result of E-R Tree Model
4.3. Scheduling Path of E-R Tree
4.4. Result of MIP
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ryu, J.H.; Han, K.S.; Hong, S.; Park, N.W.; Lee, Y.W.; Cho, J. Satellite-based evaluation of the post-fire recovery process from the worst forest fire case in South Korea. Remote Sens. 2018, 10, 918. [Google Scholar] [CrossRef] [Green Version]
- Gin, K.; Tovar, J.; Bartelink, E.J.; Kendell, A.; Milligan, C.; Willey, P.; Wood, J.; Tan, E.; Turingan, R.S.; Selden, R.F. The 2018 California wildfires: Integration of rapid DNA to dramatically accelerate victim identification. J. Forensic Sci. 2020, 65, 791–799. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ying, L.; Han, J.; Du, Y.; Shen, Z. Forest fire characteristics in China: Spatial patterns and determinants with thresholds. For. Ecol. Manag. 2018, 424, 345–354. [Google Scholar] [CrossRef]
- Yun, T.; Jiang, K.; Li, G.; Eichhorn, M.P.; Fan, J.; Liu, F.; Chen, B.; An, F.; Cao, L. Individual tree crown segmentation from airborne LiDAR data using a novel Gaussian filter and energy function minimization-based approach. Remote Sens. Environ. 2021, 256, 112307. [Google Scholar] [CrossRef]
- Khakzad, N. Optimal firefighting to prevent domino effects. In Dynamic Risk Assessment and Management of Domino Effects and Cascading Events in the Process Industry; Elsevier: Amsterdam, The Netherlands, 2021; pp. 319–339. [Google Scholar]
- Jansen, K.; Rau, M. Closing the gap for single resource constraint scheduling. arXiv 2021, arXiv:2107.01613. [Google Scholar]
- Li, J.J.; Zhu, H.Y. A risk-based model of evacuation route optimization under fire. Procedia Eng. 2018, 211, 365–371. [Google Scholar] [CrossRef]
- Klein, R.; Kübel, D.; Langetepe, E.; Sack, J.R.; Schwarzwald, B. A new model in firefighting theory. In Proceedings of the Conference on Algorithms and Discrete Applied Mathematics, Hyderabad, India, 13–15 February 2020; pp. 371–383. [Google Scholar]
- Chen, P.A.; Wu, H.T.; Hsu, Y.T. Widening narrow alleys to enhance response efficiency for fire emergency from the perspective of urban roadway network analysis. J. East. Asia Soc. Transp. Stud. 2019, 13, 2598–2613. [Google Scholar]
- Zhang, H.; Liang, Z.; Liu, H.; Wang, R.; Liu, Y. Ensemble framework by using nature inspired algorithms for the early-stage forest fire rescue—A case study of dynamic optimization problems. Eng. Appl. Artif. Intell. 2020, 90, 103517. [Google Scholar] [CrossRef]
- Zonouzi, M.N.; Kargari, M. Modeling uncertainties based on data mining approach in emergency service resource allocation. Comput. Ind. Eng. 2020, 145, 106485. [Google Scholar] [CrossRef]
- Wang, P.; Yang, J.; Jin, Y.; Wang, J. Research on allocation and dispatching strategies of rescue vehicles in emergency situation on the freeway. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; pp. 130–135. [Google Scholar]
- Lozano, L.; Duque, D.; Medaglia, A.L. An exact algorithm for the elementary shortest path problem with resource constraints. Transp. Sci. 2016, 50, 348–357. [Google Scholar] [CrossRef]
- Himmich, I.; Ben Amor, H.; El Hallaoui, I.; Soumis, F. A primal adjacency-based algorithm for the shortest path problem with resource constraints. Transp. Sci. 2020, 54, 1153–1169. [Google Scholar] [CrossRef]
- Roldán-Gómez, J.J.; González-Gironda, E.; Barrientos, A. A survey on robotic technologies for forest firefighting: Applying drone swarms to improve firefighters’ efficiency and safety. Appl. Sci. 2021, 11, 363. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, K.; Zhu, Y.; Wang, X.; Yun, T. Individual tree crown segmentation directly from UAV-borne LiDAR data using the PointNet of deep learning. Forests 2021, 12, 131. [Google Scholar] [CrossRef]
- Zhang, S.; Gao, D.; Lin, H.; Sun, Q. Wildfire detection using sound spectrum analysis based on the internet of things. Sensors 2019, 19, 5093. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Farasin, A.; Colomba, L.; Garza, P. Double-step u-net: A deep learning-based approach for the estimation of wildfire damage severity through sentinel-2 satellite data. Appl. Sci. 2020, 10, 4332. [Google Scholar] [CrossRef]
- Ye, Q.; Huang, P.; Zhang, Z.; Zheng, Y.; Fu, L.; Yang, W. Multiview learning with robust double-sided twin SVM. IEEE Trans. Cybern. 2021, 52, 12745–12758. [Google Scholar] [CrossRef] [PubMed]
- Fu, L.; Li, Z.; Ye, Q.; Yin, H.; Liu, Q.; Chen, X.; Fan, X.; Yang, W.; Yang, G. Learning robust discriminant subspace based on joint L2, p-and L2, s-norm distance metrics. IEEE Trans. Neural Netw. Learn. Syst. 2020, 33, 130–144. [Google Scholar] [CrossRef]
- Lin, H.; Xue, Q.; Bai, D. Internet of things intrusion detection model and algorithm based on cloud computing and multi-feature extraction extreme learning machine. Digit. Commun. Netw. 2022, in press. [CrossRef]
- Gong, X.; Liang, J.; Zeng, Y.; Meng, F.; Fong, S.; Yang, L. A Hierarchical Multi-objective Programming Approach to Planning Locations for Macro and Micro Fire Stations. In Proceedings of the International Conference on Computer and Communication Engineering, Rome, Italy, 11–13 March 2022; pp. 163–180. [Google Scholar]
- Tian, G.; Ren, Y.; Zhou, M. Dual-objective scheduling of rescue vehicles to distinguish forest fires via differential evolution and particle swarm optimization combined algorithm. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3009–3021. [Google Scholar] [CrossRef]
- Feng, G.; Su, G.; Sun, Z. Optimal route of emergency resource scheduling based on GIS. In Proceedings of the 3rd ACM SIGSPATIAL Workshop on Emergency Management Using, Redondo Beach, CA, USA, 7–10 November 2017; pp. 1–5. [Google Scholar]
- Petrasova, A.; Harmon, B.; Petras, V.; Tabrizian, P.; Mitasova, H. Tangible Modeling with Open Source GIS; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Wei, Y.; Thompson, M.P.; Haas, J.R.; Dillon, G.K.; O’Connor, C.D. Spatial optimization of operationally relevant large fire confine and point protection strategies: Model development and test cases. Can. J. For. Res. 2018, 48, 480–493. [Google Scholar] [CrossRef] [Green Version]
- Wei, Y.; Thompson, M.P.; Belval, E.; Gannon, B.; Calkin, D.E.; O’Connor, C.D. Comparing contingency fire containment strategies using simulated random scenarios. Nat. Resour. Model. 2021, 34, e12295. [Google Scholar] [CrossRef]
- Rodríguez-Veiga, J.; Ginzo-Villamayor, M.J.; Casas-Méndez, B. An integer linear programming model to select and temporally allocate resources for fighting forest fires. Forests 2018, 9, 583. [Google Scholar] [CrossRef]
- Laschi, A.; Neri, F.; Brachetti Montorselli, N.; Marchi, E. A methodological approach exploiting modern techniques for forest road network planning. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2016, 37, 319–331. [Google Scholar]
- Zhang, F.; Dong, Y.; Xu, S.; Yang, X.; Lin, H. An approach for improving firefighting ability of forest road network. Scand. J. For. Res. 2020, 35, 547–561. [Google Scholar] [CrossRef]
- Dan, Y. Forest Fire Extinguishing Resource Scheduling System Based on Spread Prediction. Master’s Thesis, Central South University of Forestry and Technology, Changsha, China, 2016. [Google Scholar]
- Voltolina, D.; Cappellini, G.; Apuani, T.; Sterlacchini, S. A Machine Learning Model for Predicting Wildland Surface Fire Spread According to Rothemel’s Equations. Environ. Sci. Proc. 2022, 17, 26. [Google Scholar]
- Saaty, T.L. Relative measurement and its generalization in decision making why pairwise comparisons are central in mathematics for the measurement of intangible factors the analytic hierarchy/network process. RACSAM-Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A Mat. 2008, 102, 251–318. [Google Scholar] [CrossRef]
- Eskandari, S. A new approach for forest fire risk modeling using fuzzy AHP and GIS in Hyrcanian forests of Iran. Arab. J. Geosci. 2017, 10, 190. [Google Scholar] [CrossRef]
- Alam, M.A.; Faruq, M.O. Finding shortest path for road network using Dijkstra’s algorithm. Bangladesh J. Multidiscip. Sci. Res. 2019, 1, 41–45. [Google Scholar] [CrossRef]
- Liu, T.; Duan, Y.; Liu, Y. The Framework Research of the Internet of Things in Dispatching Emergency Supplies. In Frontier Computing; Springer: Berlin/Heidelberg, Germany, 2016; pp. 841–853. [Google Scholar]
- Wang, W. Site Selection of Fire Stations in Cities Based on Geographic Information System and Fuzzy Analytic Hierarchy Process. Int. Inf. Eng. Technol. Assoc. 2019, 24, 619–626. [Google Scholar] [CrossRef]
- Gomez-Ruiz, J.A.; Karanik, M.; Peláez, J.I. Improving the consistency of AHP matrices using a multi-layer perceptron-based model. In Proceedings of the International Work-Conference on Artificial Neural Networks, Salamanca, Spain, 10–12 June 2009; pp. 41–48. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | |
|---|---|
| t | Current time period. |
| i | Kind of firefighting resource. |
| Sets | |
| Set of time periods in fire suppression. | |
| Set of fire firefighting resource in fire stations. | |
| Parameters | |
| Cost per time period for resource . | |
| Fixed cost for resource | |
| Increment of fire perimeter in time period . | |
| Performance of firefighting resource in time period | |
| P | Positive constant, large enough to establish constraints |
| Number of time periods required to arrive at the fire point by firefighting resource | |
| Decision Variables | |
| Resource has been dispatched in time period | |
| Resource has been selected | |
| If , it means the fire has been suppressed successfully in time period ; we take as 1, which means the fire is not contained in the initial time period | |
| Resource is putting out the fire | |
| Resource is on its way to the fire point in time period | |
| x | Arrival Time (M) | Cost (K) | Effect |
|---|---|---|---|
| 5 | >120 | >10 | Not obvious |
| 4 | 90–120 | 5–10 | Little obvious |
| 3 | 60–90 | 2–5 | Obvious |
| 2 | 30–60 | 1–2 | Very obvious |
| 1 | <30 | <1 | Extremely obvious |
| Data | Description | Source | Resolution |
|---|---|---|---|
| ASTGTMv003 | DEM | https://lpdaac.usgs.gov accessed on 20 July 2022 | 30 m |
| OSM | Road network | https://www.openstreetmap.org accessed on 20 August 2022 | m |
| Intensity of Scale | Explanation |
|---|---|
| 1 | and are equally preferred |
| 3 | is moderately preferred |
| 5 | is strongly preferred |
| 7 | is very strongly preferred |
| 9 | is extremely preferred |
| 2, 4, 6, 8 | The intermediate value of the adjacent grades above the |
| reciprocal | Contrary to the meaning of the above comparison |
| Fire Stations | Fire Engines | Drones | Firemen | Distance from Fire |
|---|---|---|---|---|
| M1 | 5 | 0 | 15 | 3 km |
| M2 | 8 | 0 | 20 | 10 km |
| M3 | 15 | 3 | 35 | 14 km |
| Symbol | Kind | Explanation |
|---|---|---|
| Root | Root | Successfully Put Out the Fire |
| r1 | response | Dispatch firefighting resources from M1 |
| r2 | response | Dispatch firefighting resources from M2 |
| r3 | response | Dispatch firefighting resources from M3 |
| r4 | response | Dispatch fire engines with firemen from M1 |
| r5 | response | Dispatch firemen from M1 |
| r6 | response | Dispatch fire engines with firemen from M2 |
| r7 | response | Dispatch firemen from M2 |
| r8 | response | Dispatch fire engines with firemen from M3 |
| r9 | response | Dispatch firemen from M3 |
| r10 | response | Dispatch drones with firemen from M3 |
| e1 | event | Fire engines from M1 |
| e2 | event | Firemen who operate fire engines from M1 |
| e3 | event | Firemen from M1 |
| e4 | event | Fire engines from M2 |
| e5 | event | Firemen who operate fire engines from M2 |
| e6 | event | Firemen from M2 |
| e7 | event | Fire engines from M3 |
| e8 | event | Firemen who operate fire engines from M3 |
| e9 | event | Firemen from M3 |
| e10 | event | Firemen who operate drones from M3 |
| e11 | event | Drones from M3 |
| Scheduling Path | Nodes | Stations | Number of Resources | SI | Meaning |
|---|---|---|---|---|---|
| SP 1 | e1, e2, r4, r1, root | M1 | 5 | 2.43 | 5 fire engines with 10 firemen from M1 |
| SP 2 | e3, r5, r1, root | 5 | 1.98 | 5 firemen from M1 | |
| SP 3 | e4, e5, r6, r2, root | M2 | 8 | 2.76 | 8 fire engines with 16 firemen from M2 |
| SP 4 | e7, e8, r8, r3, root | M3 | 6 | 1.14 | 6 fire engines with 12 firemen from M3 |
| SP 5 | e10, e11, r10, r3, root | 3 | 1.84 | 3 drones with 3 firemen from M3 |
| Resources | Station | Number of Resources |
|---|---|---|
| e1 | M1 | 5 |
| e2 | M1 | 10 |
| e3 | M1 | 5 |
| e4 | M2 | 8 |
| e5 | M2 | 16 |
| e6 | M2 | 0 |
| e7 | M3 | 6 |
| e8 | M3 | 12 |
| e9 | M3 | 0 |
| e10 | M3 | 3 |
| e11 | M3 | 3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, K.; Zhang, F. An Event-Response Tree-Based Resource Scheduling Method for Wildfire Fighting. Forests 2023, 14, 102. https://doi.org/10.3390/f14010102
Zhou K, Zhang F. An Event-Response Tree-Based Resource Scheduling Method for Wildfire Fighting. Forests. 2023; 14(1):102. https://doi.org/10.3390/f14010102
Chicago/Turabian StyleZhou, Kaiwen, and Fuquan Zhang. 2023. "An Event-Response Tree-Based Resource Scheduling Method for Wildfire Fighting" Forests 14, no. 1: 102. https://doi.org/10.3390/f14010102
APA StyleZhou, K., & Zhang, F. (2023). An Event-Response Tree-Based Resource Scheduling Method for Wildfire Fighting. Forests, 14(1), 102. https://doi.org/10.3390/f14010102