
Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. UAV RGB Imagery Acquisition and Preprocessing
2.3. Ground-Based Reference Data
2.4. Object-Based Tree Species Classification
2.4.1. Image Segmentation
2.4.2. Feature Selection
2.4.3. Classification Algorithm
2.4.4. Classification Accuracy Evaluation
2.5. Object-Based Classification in Different Habitat Types
3. Results
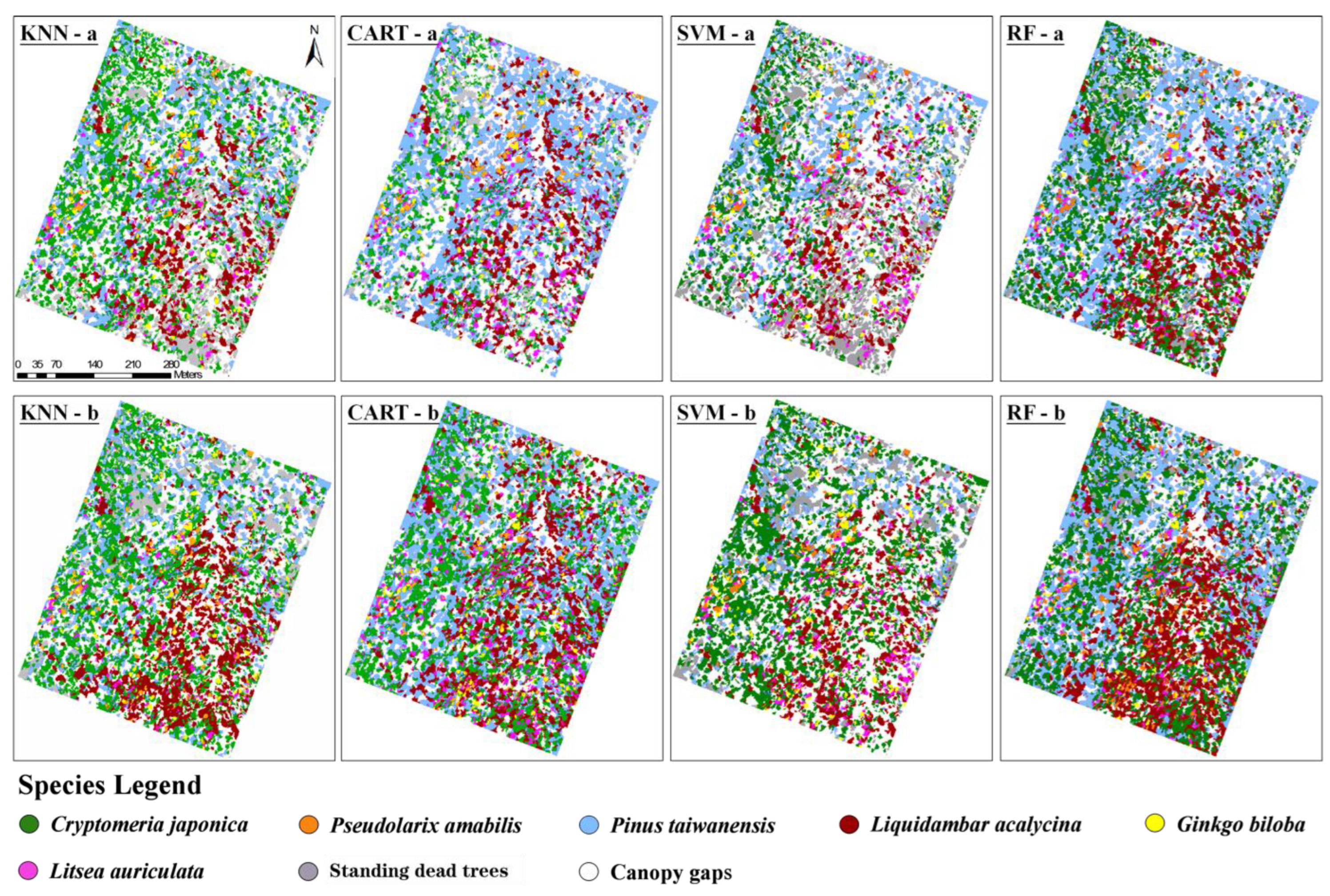
3.1. Object-Based Classification with the Combinations of Different Features
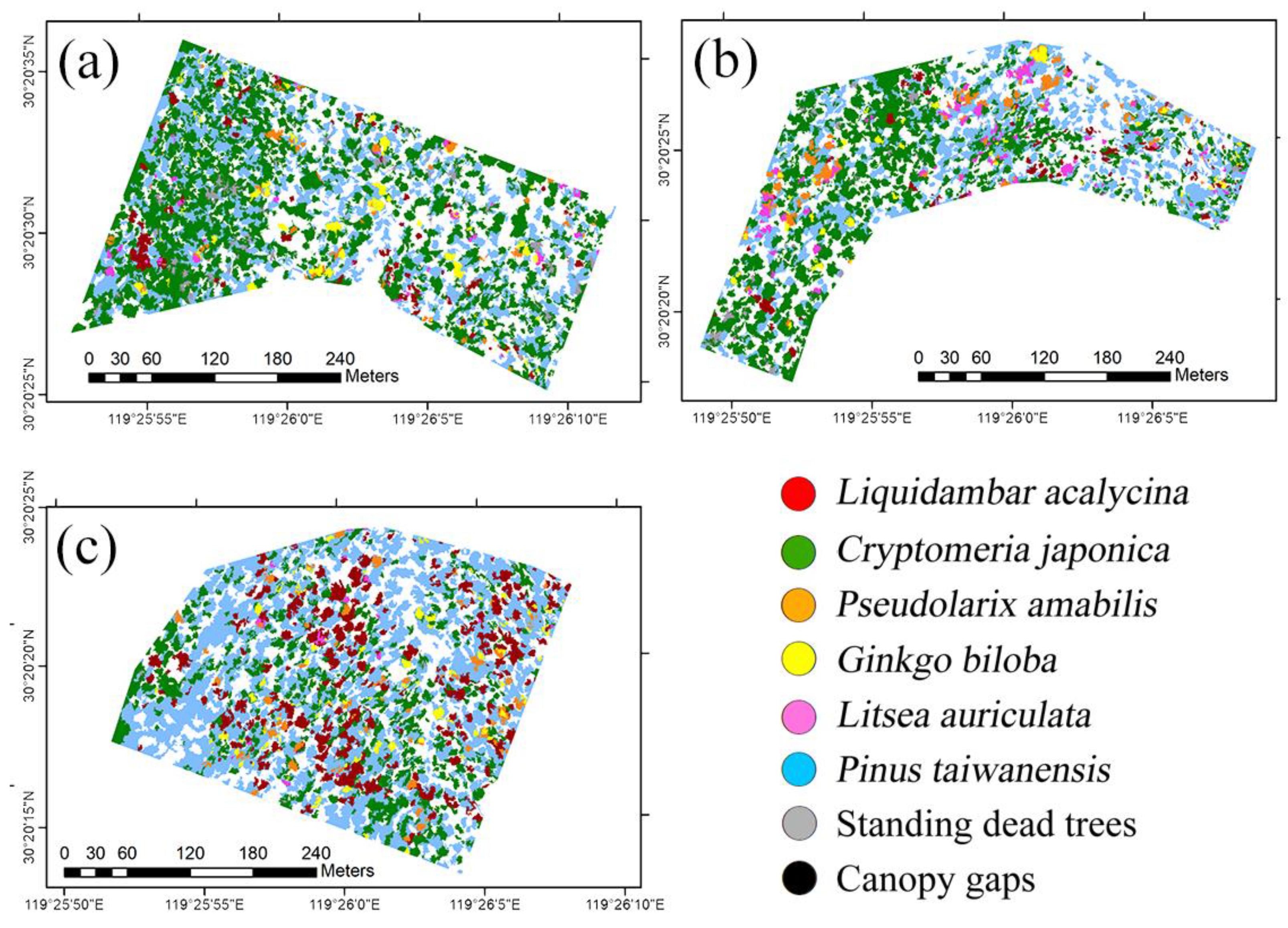
3.2. Object-Based Classification in Different Habitat Types
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jetz, W.; McGeoch, M.A.; Guralnick, R.; Ferrier, S.; Beck, J.; Costello, M.; Fernandez, M.; Geller, G.N.; Keil, P.; Merow, C.; et al. Essential biodiversity variables for mapping and monitoring species populations. Nat. Ecol. Evol. 2019, 3, 539–551. [Google Scholar] [CrossRef] [PubMed]
- Cavender-Bares, J.; Schneider, F.D.; Santos, M.J.; Armstrong, A.; Carnaval, A.; Dahlin, K.M.; Fatoyinbo, L.; Hurtt, G.C.; Schimel, D.; Townsend, P.A.; et al. Integrating remote sensing with ecology and evolution to advance biodiversity conservation. Nat. Ecol. Evol. 2022, 6, 506–519. [Google Scholar] [CrossRef] [PubMed]
- FAO; UNEP. The State of the World’s Forests 2020: Forests, Biodiversity and People; FAO: Rome, Italy, 2020. [Google Scholar]
- Hemmerling, J.; Pflugmacher, D.; Hostert, P. Mapping temperate forest tree species using dense Sentinel-2 time series. Remote Sens. Environ. 2021, 267, 13. [Google Scholar] [CrossRef]
- Mayra, J.; Keski-Saari, S.; Kivinen, S.; Tanhuanpaa, T.; Hurskainen, P.; Kullberg, P.; Poikolainen, L.; Viinikka, A.; Tuominen, S.; Kumpula, T.; et al. Tree species classification from airborne hyperspectral and LiDAR data using 3D convolutional neural networks. Remote Sens. Environ. 2021, 256, 16. [Google Scholar] [CrossRef]
- Kim, S.; McGaughey, R.J.; Andersen, H.E.; Schreuder, G. Tree species differentiation using intensity data derived from leaf-on and leaf-off airborne laser scanner data. Remote Sens. Environ. 2009, 113, 1575–1586. [Google Scholar] [CrossRef]
- Franklin, S.E.; Ahmed, O.S. Deciduous tree species classification using object-based analysis and machine learning with unmanned aerial vehicle multispectral data. Int. J. Remote Sens. 2018, 39, 5236–5245. [Google Scholar] [CrossRef]
- Fricker, G.A.; Ventura, J.D.; Wolf, J.A.; North, M.P.; Davis, F.W.; Franklin, J. A Convolutional Neural Network Classifier Identifies Tree Species in Mixed-Conifer Forest from Hyperspectral Imagery. Remote Sens. 2019, 11, 2326. [Google Scholar] [CrossRef]
- Immitzer, M.; Neuwirth, M.; Bock, S.; Brenner, H.; Vuolo, F.; Atzberger, C. Optimal Input Features for Tree Species Classification in Central Europe Based on Multi-Temporal Sentinel-2 Data. Remote Sens. 2019, 11, 2599. [Google Scholar] [CrossRef]
- Feret, J.B.; Asner, G.P. Tree Species Discrimination in Tropical Forests Using Airborne Imaging Spectroscopy. IEEE Trans. Geosci. Remote Sens. 2013, 51, 73–84. [Google Scholar] [CrossRef]
- Baldeck, C.A.; Asner, G.P.; Martin, R.E.; Anderson, C.B.; Knapp, D.E.; Kellner, J.R.; Wright, S.J. Operational Tree Species Mapping in a Diverse Tropical Forest with Airborne Imaging Spectroscopy. PLoS ONE 2015, 10, 21. [Google Scholar] [CrossRef]
- Cross, M.; Scambos, T.; Pacifici, F.; Vargas-Ramirez, O.; Moreno-Sanchez, R.; Marshall, W. Classification of Tropical Forest Tree Species Using Meter-Scale Image Data. Remote Sens. 2019, 11, 1411. [Google Scholar] [CrossRef]
- Xu, Z.; Shen, X.; Cao, L.; Coops, N.C.; Goodbody, T.R.H.; Zhong, T.; Zhao, W.D.; Sun, Q.L.; Ba, S.; Zhang, Z.N.; et al. Tree species classification using UAS-based digital aerial photogrammetry point clouds and multispectral imageries in subtropical natural forests. Int. J. Appl. Earth Obs. Geoinf. 2020, 92, 14. [Google Scholar] [CrossRef]
- Tang, Z.Y.; Wang, Z.H.; Zheng, C.Y.; Fang, J.Y. Biodiversity in China’s mountains. Front. Ecol. Environ. 2006, 4, 347–352. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, J.B.; Lian, J.Y.; Fan, Z.J.; Ouyang, X.J.; Ye, W.H. Seeing the forest from drones: Testing the potential of lightweight drones as a tool for long-term forest monitoring. Biol. Conserv. 2016, 198, 60–69. [Google Scholar] [CrossRef]
- Lisein, J.; Michez, A.; Claessens, H.; Lejeune, P. Discrimination of Deciduous Tree Species from Time Series of Unmanned Aerial System Imagery. PLoS ONE 2015, 10, 20. [Google Scholar] [CrossRef]
- Miyoshi, G.; Imai, N.; De Moraes, M.; Tommaselli, A.; Näsi, R. Time series of images to improve tree species classification. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2017, XLII-3/W3, 123–128. [Google Scholar] [CrossRef]
- Almeida, J.; dos Santos, J.A.; Alberton, B.; Torres, R.D.; Morellato, L.P.C. Applying machine learning based on multiscale classifiers to detect remote phenology patterns in Cerrado savanna trees. Ecol. Inform. 2014, 23, 49–61. [Google Scholar] [CrossRef]
- Almeida, J.; Pedronette, D.C.G.; Alberton, B.C.; Morellato, L.P.C.; Torres, R.D. Unsupervised Distance Learning for Plant Species Identification. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 5325–5338. [Google Scholar] [CrossRef]
- Dronova, I.; Taddeo, S. Remote sensing of phenology: Towards the comprehensive indicators of plant community dynamics from species to regional scales. J. Ecol. 2022, 110, 1460–1484. [Google Scholar] [CrossRef]
- Hill, R.A.; Wilson, A.K.; George, M.; Hinsley, S.A. Mapping tree species in temperate deciduous woodland using time-series multi-spectral data. Appl. Veg. Sci. 2010, 13, 86–99. [Google Scholar] [CrossRef]
- Persson, M.; Lindberg, E.; Reese, H. Tree Species Classification with Multi-Temporal Sentinel-2 Data. Remote Sens. 2018, 10, 1794. [Google Scholar] [CrossRef]
- Schriever, J.R.; Congalton, R.G. Evaluating Seasonal Variability as An Aid to Cover-Type Mapping From Landsat Thematic Mapper Data In The Northeast. Photogramm. Eng. Remote Sens. 1995, 61, 321–327. [Google Scholar]
- Mickelson, J.G.; Civco, D.L.; Silander, J.A. Delineating forest canopy species in the northeastern United States using multi-temporal TM imagery. Photogramm. Eng. Remote Sens. 1998, 64, 891–904. [Google Scholar]
- Swanson, F.J.; Kratz, T.K.; Caine, N.; Woodmansee, R.G. Landform Effects on Ecosystem Patterns And Processes. Bioscience 1988, 38, 92–98. [Google Scholar] [CrossRef]
- Harms, K.E.; Condit, R.; Hubbell, S.P.; Foster, R.B. Habitat associations of trees and shrubs in a 50-ha neotropical forest plot. J. Ecol. 2001, 89, 947–959. [Google Scholar] [CrossRef]
- Metz, M.R. Does habitat specialization by seedlings contribute to the high diversity of a lowland rain forest? J. Ecol. 2012, 100, 969–979. [Google Scholar] [CrossRef]
- Dong, C.; Zhao, G.X.; Meng, Y.; Li, B.H.; Peng, B. The Effect of Topographic Correction on Forest Tree Species Classification Accuracy. Remote Sens. 2020, 12, 787. [Google Scholar] [CrossRef]
- Yin, H.; Tan, B.; Frantz, D.; Radeloff, V.C.C. Integrated topographic corrections improve forest mapping using Landsat imagery. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 15. [Google Scholar] [CrossRef]
- Li, A.N.; Wang, Q.F.; Bian, J.H.; Lei, G.B. An Improved Physics-Based Model for Topographic Correction of Landsat TM Images. Remote Sens. 2015, 7, 6296–6319. [Google Scholar] [CrossRef]
- Tianmu Mountain Nature Reserve. Comprehensive Investigation Report on Natural Resource of Tianmu Mountain Nature Reserve; Zhejiang Science and Technology Press: Hangzhou, China, 1992. (In Chinese) [Google Scholar]
- Zhang, R.; Zhang, Z.C.; Shang, K.K.; Zhao, M.S.; Kong, J.X.; Wang, X.; Wang, Y.Z.; Song, H.J.; Zhang, O.K.; Lv, X.; et al. A taxonomic and phylogenetic perspective on plant community assembly along an elevational gradient in subtropical forests. J. Plant Ecol. 2021, 14, 702–716. [Google Scholar] [CrossRef]
- Zhou, H.Y.; Fu, L.Y.; Sharma, R.P.; Lei, Y.C.; Guo, J.P. A Hybrid Approach of Combining Random Forest with Texture Analysis and VDVI for Desert Vegetation Mapping Based on UAV RGB Data. Remote Sens. 2021, 13, 1891. [Google Scholar] [CrossRef]
- Stow, D.; Nichol, C.J.; Wade, T.; Assmann, J.J.; Simpson, G.; Helfter, C. Illumination Geometry and Flying Height Influence Surface Reflectance and NDVI Derived from Multispectral UAS Imagery. Drones 2019, 3, 55. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Bartolo, R.E. A robust object-based woody cover extraction technique for monitoring mine site revegetation at scale in the monsoonal tropics using multispectral RPAS imagery from different sensors. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 300–312. [Google Scholar] [CrossRef]
- Blaschke, T.; Burnett, C.; Pekkarinen, A. Image segmentation methods for object-based analysis and classification. In Remote Sensing Image Analysis: Including the Spatial Domain; Jong, S.M.D., Meer, F.D.V., Eds.; Springer: Dordrecht, The Netherlands, 2004; pp. 211–236. [Google Scholar]
- Kamal, M.; Phinn, S. Hyperspectral Data for Mangrove Species Mapping: A Comparison of Pixel-Based and Object-Based Approach. Remote Sens. 2011, 3, 2222–2242. [Google Scholar] [CrossRef]
- Aguirre-Gutierrez, J.; Seijmonsbergen, A.C.; Duivenvoorden, J.F. Optimizing land cover classification accuracy for change detection, a combined pixel-based and object-based approach in a mountainous area in Mexico. Appl. Geogr. 2012, 34, 29–37. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Cao, J.J.; Leng, W.C.; Liu, K.; Liu, L.; He, Z.; Zhu, Y.H. Object-Based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models. Remote Sens. 2018, 10, 89. [Google Scholar] [CrossRef]
- Li, L.W.; Li, N.; Lu, D.S.; Chen, Y.Y. Mapping Moso bamboo forest and its on-year and off-year distribution in a subtropical region using time-series Sentinel-2 and Landsat 8 data. Remote Sens. Environ. 2019, 231, 14. [Google Scholar] [CrossRef]
- Wu, S.B.; Wen, J.G.; Lin, X.W.; Hao, D.L.; You, D.Q.; Xiao, Q.; Liu, Q.H.; Yin, T.G. Modeling Discrete Forest Anisotropic Reflectance Over a Sloped Surface with an Extended GOMS and SAIL Model. IEEE Trans. Geosci. Remote Sens. 2019, 57, 944–957. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and Structural Approaches To Texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Cover, T.; Hart, P. Nearest neighbor pattern classification. IEEE Trans. Inf. Theory 1967, 13, 21–27. [Google Scholar] [CrossRef]
- Yang, J.M.; Yu, P.T.; Kuo, B.C. A Nonparametric Feature Extraction and Its Application to Nearest Neighbor Classification for Hyperspectral Image Data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1279–1293. [Google Scholar] [CrossRef]
- Breiman, L. Classification and Regression Trees; Routledge: New York, NY, USA, 1984. [Google Scholar]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: New York, NY, USA, 1999. [Google Scholar]
- Gualtieri, J.A.; Cromp, R.F. Support vector machines for hyperspectral remote sensing classification. In Proceedings of the 27th AIPR Workshop: Advances in Computer-Assisted Recognition, Washington, DC, USA, 29 January 1999; pp. 221–232. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Clark, M.L.; Roberts, D.A.; Clark, D.B. Hyperspectral discrimination of tropical rain forest tree species at leaf to crown scales. Remote Sens. Environ. 2005, 96, 375–398. [Google Scholar] [CrossRef]
- Shi, Y.F.; Wang, T.J.; Skidmore, A.K.; Heurich, M. Improving LiDAR-based tree species mapping in Central European mixed forests using multi-temporal digital aerial colour-infrared photographs. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 10. [Google Scholar] [CrossRef]
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree Species Classification in a Highly Diverse Subtropical Forest Integrating UAV-Based Photogrammetric Point Cloud and Hyperspectral Data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef]
- Blackburn, G.A. Spectral indices for estimating photosynthetic pigment concentrations: A test using senescent tree leaves. Int. J. Remote Sens. 1998, 19, 657–675. [Google Scholar] [CrossRef]
- Grigorieva, O.; Brovkina, O.; Saidov, A. An original method for tree species classification using multitemporal multispectral and hyperspectral satellite data. Silva Fenn. 2020, 54, 10143. [Google Scholar] [CrossRef]
- Cornelius, C.; Estrella, N.; Franz, H.; Menzel, A. Linking altitudinal gradients and temperature responses of plant phenology in the Bavarian Alps. Plant Biol. 2013, 15, 57–69. [Google Scholar] [CrossRef] [PubMed]
- Kallimanis, A.S.; Bergmeier, E.; Panitsa, M.; Georghiou, K.; Delipetrou, P.; Dimopoulos, P. Biogeographical determinants for total and endemic species richness in a continental archipelago. Biodivers. Conserv. 2010, 19, 1225–1235. [Google Scholar] [CrossRef]
- Sandel, B.; Svenning, J.C. Human impacts drive a global topographic signature in tree cover. Nat. Commun. 2013, 4, 7. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Zhao, L.; Zhang, X.L. Three-dimensional convolutional neural network model for tree species classification using airborne hyperspectral images. Remote Sens. Environ. 2020, 247, 16. [Google Scholar] [CrossRef]
- Shang, K.K. Differentiation Maintenance of Relict Deciduous Broad-Leaved Forest Patterns along Micro-Topographic Gradient in Subtropical Area, East China (In Chinese). Ph.D. Thesis, East China Normal University, Shanghai, China, 2011. [Google Scholar]
- Norton, C.L.; Hartfield, K.; Collins, C.D.H.; van Leeuwen, W.J.D.; Metz, L.J. Multi-Temporal LiDAR and Hyperspectral Data Fusion for Classification of Semi-Arid Woody Cover Species. Remote Sens. 2022, 14, 2896. [Google Scholar] [CrossRef]
- Cole, B.; McMorrow, J.; Evans, M. Spectral monitoring of moorland plant phenology to identify a temporal window for hyperspectral remote sensing of peatland. ISPRS J. Photogramm. Remote Sens. 2014, 90, 49–58. [Google Scholar] [CrossRef]
- Dobrowski, S.Z. A climatic basis for microrefugia: The influence of terrain on climate. Glob. Chang. Biol. 2011, 17, 1022–1035. [Google Scholar] [CrossRef]
- Giriraj, A.; Murthy, M.S.R.; Ramesh, B.R.; Dutt, C.B.S. A method for assessing evergreen habitats using phytodiversity and geospatial techniques in tropical rain forests of Southern Western Ghats (India). Ecol. Res. 2009, 24, 749–760. [Google Scholar] [CrossRef]
- Chiang, S.H.; Valdez, M. Tree Species Classification by Integrating Satellite Imagery and Topographic Variables Using Maximum Entropy Method in a Mongolian Forest. Forests 2019, 10, 961. [Google Scholar] [CrossRef]
- Hoscilo, A.; Lewandowska, A. Mapping Forest Type and Tree Species on a Regional Scale Using Multi-Temporal Sentinel-2 Data. Remote Sens. 2019, 11, 929. [Google Scholar] [CrossRef]
- Pau, S.; Nippert, J.B.; Slapikas, R.; Griffith, D.; Bachle, S.; Helliker, B.R.; O’Connor, R.C.; Riley, W.J.; Still, C.J.; Zaricor, M. Poor relationships between NEON Airborne Observation Platform data and field-based vegetation traits at a mesic grassland. Ecology 2022, 103, 10. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.M.; Wong, A.K.C.; Kamel, M.S. Classification of Imbalanced Data: A Review. Int. J. Pattern Recognit. Artif. Intell. 2009, 23, 687–719. [Google Scholar] [CrossRef]
- Dalponte, M.; Orka, H.O.; Gobakken, T.; Gianelle, D.; Naeesset, E. Tree Species Classification in Boreal Forests with Hyperspectral Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2632–2645. [Google Scholar] [CrossRef]
- Mellor, A.; Boukir, S.; Haywood, A.; Jones, S. Exploring issues of training data imbalance and mislabelling on random forest performance for large area land cover classification using the ensemble margin. ISPRS J. Photogramm. Remote Sens. 2015, 105, 155–168. [Google Scholar] [CrossRef]
- Schimel, D.; Schneider, F.D.; Bloom, A.; Bowman, K.; Cawse-Nicholson, K.; Elder, C.; Ferraz, A.; Fisher, J.; Hulley, G.; Liu, J.J.; et al. Flux towers in the sky: Global ecology from space. New Phytol. 2019, 224, 570–584. [Google Scholar] [CrossRef] [PubMed]
- Schneider, F.D.; Ferraz, A.; Hancock, S.; Duncanson, L.I.; Dubayah, R.O.; Pavlick, R.P.; Schimel, D.S. Towards mapping the diversity of canopy structure from space with GEDI. Environ. Res. Lett. 2020, 15, 15. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Objects | KNN | CART | SVM | RF | ||||
|---|---|---|---|---|---|---|---|---|
| PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | |
| Cryptomeria japonica | 76.05 | 86.86 | 47.90 | 85.96 | 66.50 | 83.99 | 74.01 | 85.74 |
| Pseudolarix amabilis | 60.96 | 80.75 | 47.12 | 72.64 | 59.15 | 86.10 | 54.43 | 84.25 |
| Pinus taiwanensis | 78.47 | 46.65 | 80.17 | 29.55 | 67.74 | 38.22 | 82.35 | 46.44 |
| Ginkgo biloba | 70.71 | 65.82 | 43.83 | 50.18 | 76.52 | 64.20 | 57.94 | 60.23 |
| Liquidambar acalycina | 97.93 | 97.06 | 93.88 | 96.27 | 97.93 | 100.0 | 97.82 | 90.80 |
| Litsea auriculata | 63.56 | 68.80 | 78.30 | 48.42 | 69.95 | 72.44 | 80.40 | 56.44 |
| Standing dead trees | 100.0 | 97.03 | 94.79 | 93.72 | 100.0 | 92.98 | 95.72 | 95.14 |
| Canopy gaps | 97.84 | 98.50 | 82.00 | 80.90 | 100.0 | 94.98 | 91.25 | 98.38 |
| Overall accuracy (OA, %) | 83.30 | 68.55 | 80.70 | 80.50 | ||||
| Cohen’s Kappa coefficient (K) | 0.80 | 0.63 | 0.77 | 0.77 | ||||
| Target Objects | KNN | CART | SVM | RF | ||||
|---|---|---|---|---|---|---|---|---|
| PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | |
| Cryptomeria japonica | 78.16 | 76.68 | 74.48 | 81.96 | 68.48 | 75.06 | 80.70 | 90.53 |
| Pseudolarix amabilis | 61.80 | 66.23 | 54.52 | 71.94 | 45.40 | 81.71 | 76.68 | 73.10 |
| Pinus taiwanensis | 45.86 | 38.83 | 66.80 | 36.78 | 25.57 | 19.19 | 83.72 | 52.11 |
| Ginkgo biloba | 50.82 | 57.96 | 51.66 | 52.57 | 75.50 | 52.31 | 56.20 | 65.90 |
| Liquidambar acalycina | 94.73 | 97.12 | 97.82 | 89.49 | 97.93 | 99.13 | 97.82 | 88.83 |
| Litsea auriculata | 48.43 | 66.80 | 54.85 | 43.13 | 54.67 | 61.74 | 63.73 | 64.26 |
| Standing dead trees | 96.04 | 86.06 | 89.67 | 97.55 | 100.0 | 97.08 | 93.94 | 100.0 |
| Canopy gaps | 96.12 | 95.99 | 79.73 | 94.04 | 99.03 | 92.35 | 88.46 | 98.33 |
| Overall accuracy (OA, %) | 78.27 | 74.84 | 75.50 | 83.13 | ||||
| Cohen’s Kappa coefficient (K) | 0.736 | 0.699 | 0.705 | 0.798 | ||||
| Target Objects | Upper Flat | Upper Slope | Low Slope | |||
|---|---|---|---|---|---|---|
| PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | |
| Cryptomeria japonica | 83.85 | 68.67 | 100 | 92.57 | 100 | 85.24 |
| Pseudolarix amabilis | 29.58 | 100 | 43.27 | 100 | 76.71 | 78.61 |
| Pinus taiwanensis | 22.13 | 40.23 | 84.36 | 100 | 62.88 | 100 |
| Ginkgo biloba | 100 | 72.62 | 100 | 58.03 | 100 | 91.39 |
| Liquidambar acalycina | 100 | 69.94 | 100 | 100 | 100 | 100 |
| Litsea auriculata | 47.49 | 59.24 | 100 | 100 | 59.60 | 100 |
| Standing dead trees | 100 | 100 | 100 | 100 | 100 | 100 |
| Canopy gaps | 100 | 100 | 100 | 100 | 100 | 100 |
| Overall accuracy (OA, %) | 73.56 | 92.18 | 92.57 | |||
| Cohen’s Kappa coefficient (K) | 0.677 | 0.902 | 0.909 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Kong, J.; Zhang, Z.; Hu, J.; Qin, Y.; Shang, K.; Zhao, M.; Zhang, J. Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests. Forests 2023, 14, 908. https://doi.org/10.3390/f14050908
Jiang M, Kong J, Zhang Z, Hu J, Qin Y, Shang K, Zhao M, Zhang J. Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests. Forests. 2023; 14(5):908. https://doi.org/10.3390/f14050908
Chicago/Turabian StyleJiang, Meichen, Jiaxin Kong, Zhaochen Zhang, Jianbo Hu, Yuchu Qin, Kankan Shang, Mingshui Zhao, and Jian Zhang. 2023. "Seeing Trees from Drones: The Role of Leaf Phenology Transition in Mapping Species Distribution in Species-Rich Montane Forests" Forests 14, no. 5: 908. https://doi.org/10.3390/f14050908