1. Introduction
Forestry is an important sector for the sustainable management of natural resources and the mitigation of climate change. However, obtaining an accurate inventory of all forest resources is a challenging task that requires frequent and precise measurements of trees, understory vegetation, and seedlings. Traditional forest inventory methods of taking seedling inventory are time-consuming and expensive, and often provide insufficient spatial resolution to accurately estimate the number and distribution of seedlings. Therefore, there is a need for innovative and cost-effective technologies to improve the accuracy and efficiency of taking forest inventories.
Finland’s economy is heavily reliant on forestry [
1,
2], making forestry a key driver of the bio-economy [
3]. However, the country’s aging population [
4,
5], resulting from declining fertility rates and increasing life expectancy, is causing concern due to the potential for labor shortages and lower economic growth as older workers retire without enough young replacements. This is particularly significant in the forestry sector, which is experiencing a decline in the number of workers despite the value of manual work increasing. Therefore, there is a need to develop new, cost-effective methods for forest management [
6], especially for inventorying seedlings.
In recent decades, the global forested area has decreased, creating a pressing need for forest restoration and regeneration. However, challenges, such as labor shortages and high costs, require innovative approaches to forest regeneration [
7]. To maintain sustainable management practices following resource extraction, reliable and accurate monitoring of replanted forest areas is critical. Unmanned aerial vehicles (UAVs) can quickly survey newly planted forest areas using high-resolution imagery. By utilizing automated image-processing techniques, these technologies can examine large quantities of data cost-effectively. The combination of these technologies can efficiently create accurate maps of seedling locations, creating the potential for management practices in forestry and ecology operations that involve less fieldwork [
8].
To combat soil erosion, flooding, and outbreaks of zoonotic disease while also mitigating climate change and supporting local communities, tree replanting is a crucial effort. However, many current methods for afforestation and reforestation (A/R) are not feasible over large areas due to limitations in time, manpower, energy, and nursery-based seedling production, making it imperative to explore new technologies and strategies to expedite and scale up A/R efforts [
9].
Appropriate planting density and spatial distribution ensure sufficient space for each tree to grow, access resources, and reach its full potential in terms of growth and productivity. This promotes a healthy and productive forest with optimal tree size and biomass production, mitigating the negative impacts of deforestation and climate change. Forests act as carbon sinks, absorbing carbon dioxide from the atmosphere and storing it in biomass and soil. The proper planting density and spatial distribution of trees maximizes the carbon sequestration potential of forests and aids in combating climate change. Maximizing economic returns for forest owners can be achieved by planting trees at the appropriate density and spatial distribution. Overcrowding may lead to increased competition for resources, which reduces growth, while undercrowding can result in wasted space and decreased profitability. Planting forest seedlings at the proper density and spatial distribution can also attract a diverse range of plant and animal species. A healthy and diverse forest eco-system can support a variety of wildlife, including endangered and threatened species.
UAVs have recently gained popularity in the field of forestry due to their ability to collect high-resolution data quickly and accurately [
10]. However, detecting and identifying individual seedlings from aerial imagery remains a challenge, especially in the presence of background vegetation. Deep learning algorithms have been shown to be effective in detecting and identifying objects in complex and cluttered environments, making them a promising approach for seedling detection in forest inventories [
7,
9,
11].
Deep learning algorithms are a class of machine learning methods that are based on artificial neural networks with multiple layers. These algorithms are designed to automatically learn representations of data at increasing levels of abstraction, allowing them to extract useful features and patterns from raw input data. Deep learning algorithms are particularly well-suited for tasks that involve large amounts of data, as their ability to learn from these data can result in highly accurate predictions and classifications. Examples of deep learning algorithms include convolutional neural networks (CNNs), recurrent neural networks (RNNs), and deep belief networks (DBNs), among others [
12].
Previous research has demonstrated the potential of utilizing convolutional neural networks for the detection of seedlings [
8,
11,
13,
14]. In addition, recent advancements in agriculture have highlighted the promising potential of neural networks for the detection of plants [
15,
16,
17]. There are several potential benefits of using deep learning algorithms over non-machine learning methods, as follows:
Deep learning algorithms are capable of learning complex representations of input data, which can result in highly accurate predictions and classifications. This can be particularly beneficial in applications where the accuracy of the results is critical, such as plant detection in forest monitoring.
Deep learning algorithms can process large amounts of data quickly, which can be beneficial in applications where time is a constraint. This can allow for more frequent monitoring of forested areas, which can help detect changes in vegetation patterns over time.
Deep learning algorithms can be trained to detect vegetation automatically, without the need for human intervention. This can be particularly useful in large-scale monitoring applications where manual detection would be time-consuming and costly.
Deep learning algorithms can be trained to detect a wide range of features, including individual plant detection and the detection of competing vegetation. This flexibility can make them useful in a variety of forest monitoring applications in Finland and elsewhere.
Consumer drones present an opportunity to conduct low-cost, lightweight, and mobile inventorying of planted seedlings to assess the quality of planting work and evaluate density. The research gap in using consumer drones for spruce seedling inventories in Finland is due to the limited application of deep learning algorithms for seedling detection and identification in complex and cluttered environments. While previous studies have shown the potential of deep learning algorithms, particularly convolutional neural networks, in detecting seedlings, most of these studies were conducted in other geographic regions and may not be directly applicable to the conditions in Finland.
The advantage of consumer drones is their relatively small size, allowing forest managers to carry them in their pockets or backpacks while taking inventory of planted areas. The limitation of consumer drones is their low-resolution cameras, which limit their flying altitude. In order to achieve reliable seedling recognition, the altitude had to be around 5 m. The limited flying altitude of consumer drones creates a problem where drones can potentially crash into trees with heights higher than the flying altitude. One potential solution to overcome this limitation is to use two-stage drone flights. A two-stage drone flight pattern could be employed to collect very high-resolution data. Firstly, a flight could be conducted at high altitude to generate an obstacle map. This map could then be used to conduct a second flight at low altitude, avoiding collisions with larger trees.
While UAVs can rapidly survey newly planted forest areas using high-resolution imagery, detecting and identifying individual seedlings from aerial imagery remains a challenge, especially with the presence of background vegetation. Therefore, there is a need to explore and develop deep learning algorithms that are specifically trained for detecting and identifying spruce seedlings in the forested areas of Finland. Additionally, there is a need to investigate the feasibility and cost-effectiveness of using consumer drones for taking spruce seedling inventories, particularly in comparison with traditional seedling surveys.
The objective of this research is to develop a cost-effective solution for accurate inventory of spruce seedlings using consumer drones and deep learning techniques. The research also aims to make a valuable contribution to the field of forestry by demonstrating the potential of using two-stage UAV flights and deep learning algorithms for accurate and efficient forest seedling inventory.
The technical roadmap involved several steps, including drone data collection, field data collection, training the deep learning model, and kernel density analysis.
3. Results
3.1. Smart Flight Planning for High-Resolution Data Collection Using UAVs
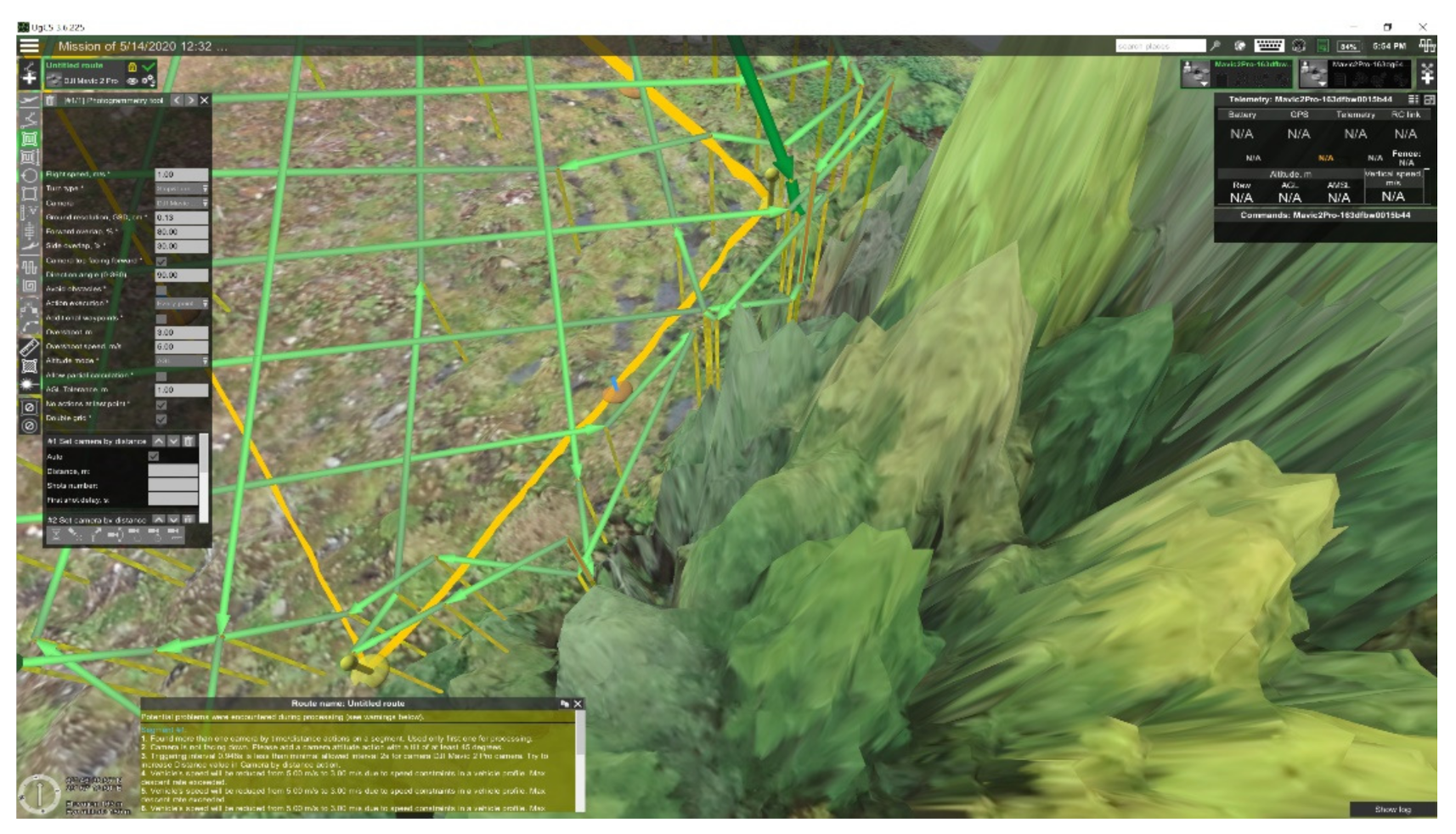
A two-stage flight pattern was developed for collecting very high-resolution data using a consumer drone. Initially, a flight was conducted at an altitude of 120 m to generate an obstacle map (
Figure 3), which was then imported into UgCS software to conduct a flight at a 5 m altitude (
Figure 4) to avoid any collision with larger trees. This technique enabled the creation of orthophoto mosaics with a spatial resolution of 2.22 mm (
Figure 5).
3.2. Choosing the Optimal Time Period for Drone Flight to Improve Accuracy of Spruce Seedling Identification
To improve the accuracy of identifying spruce seedlings, we tested 10 different drone flights at a 5 m altitude on a monthly basis from April to November 2020. One of the challenges in detecting conifer seedlings from low-flying altitudes is the green colour of the background vegetation, including grasses, shrubs, and other tree species. Collecting multispectral data may overcome this issue, but, for this project, we aimed to develop a cost-effective solution using consumer drones. Thus, we selected periods when the background vegetation would not affect the seedlings’ detection or when the seedlings were not covered by snow. Based on the visual assessment of the orthomosaics and a meteorological data analysis, the best imaging time for taking seedling inventory in the Kontiolahti study area was in the spring, from the end of May to the beginning of June, when the background vegetation does not cover the seedlings. For taking conifer seedling inventory in the fall, the ideal period was from the end of September to the beginning of November, when snow does not cover the seedlings. If snow coverage occurs, seedling detection is only possible when the height of the snow is less than one-third of the seedlings’ height (i.e., 5 cm).
3.3. Using Convolutional Neural Networks to Automatically Detect Planted Spruce Seedlings in UAV Imagery
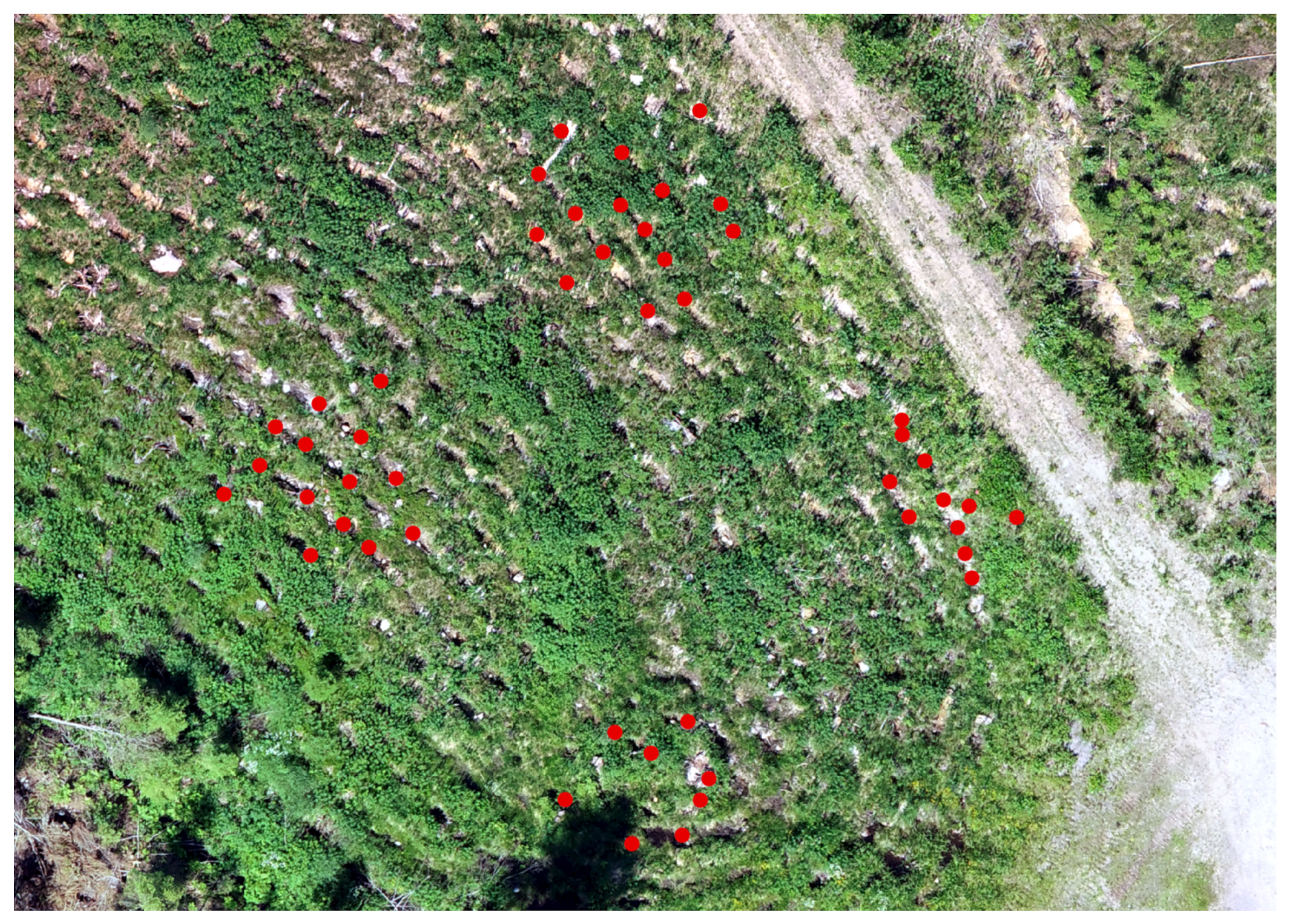
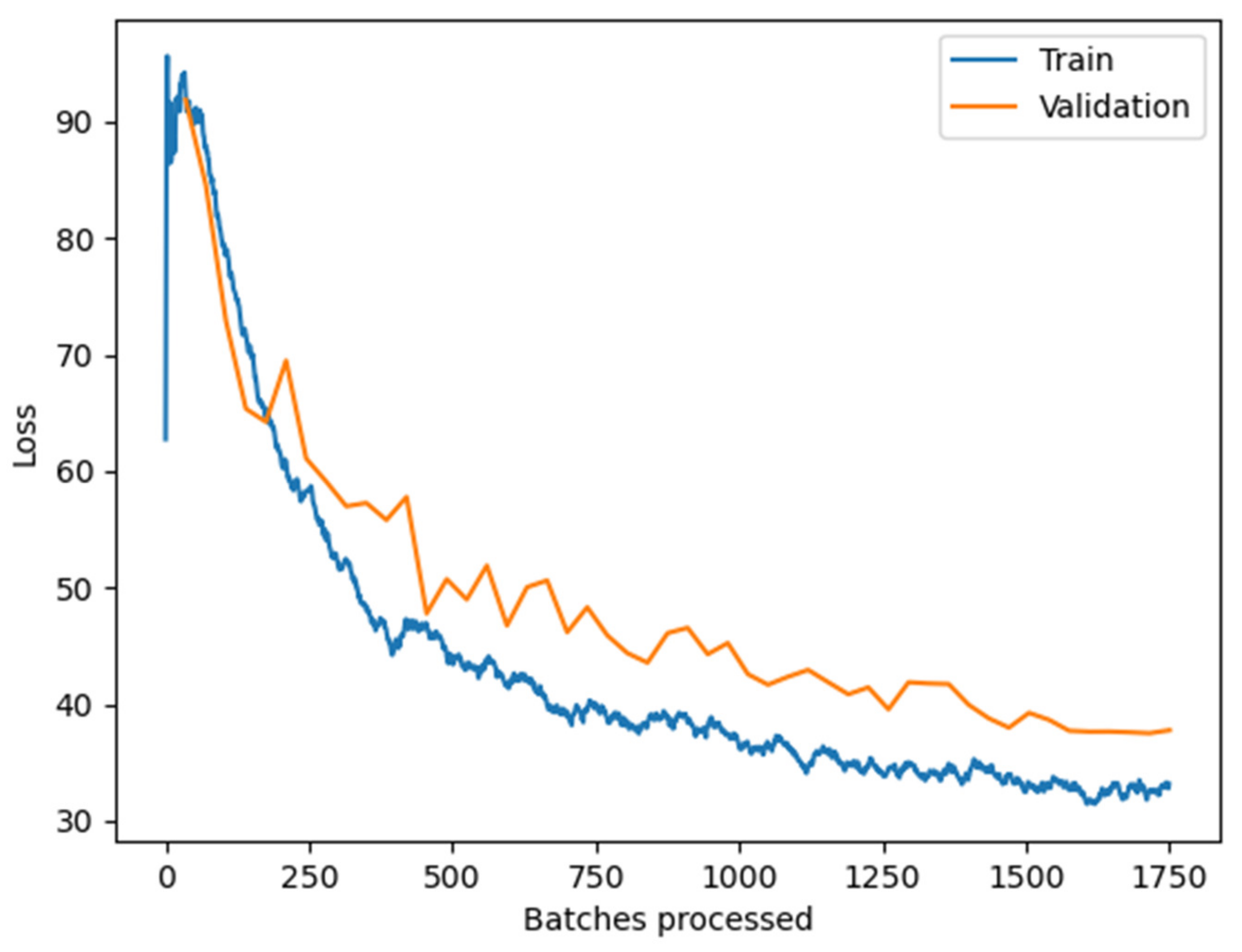
Figure 6 presents the training and validation loss of the spruce seedlings detection model. The model achieved an average precision score of 84% and was trained using 469 samples on a 12th Gen Intel(R) Core(TM) i9-12900HK 2.90 GHz with an NVIDIA GeForce RTX 3080 Ti Laptop GPU. The training process took 44 min. Once the model was trained, detection of the planted seedlings only took 2 min per image mosaic, as shown in
Figure 7, which displays an orthophoto with a spatial resolution of 2.22 mm/pixel with spruce seedlings identified.
Out of the 375 seedlings in the test dataset, 367 seedlings were correctly detected, as verified by field observations, resulting in a detection accuracy of 97.86%. A visual assessment was conducted, but no incorrectly detected seedlings were found.
3.4. Detection of the Sites in Need of Additional Planting of Spruce Seedlings
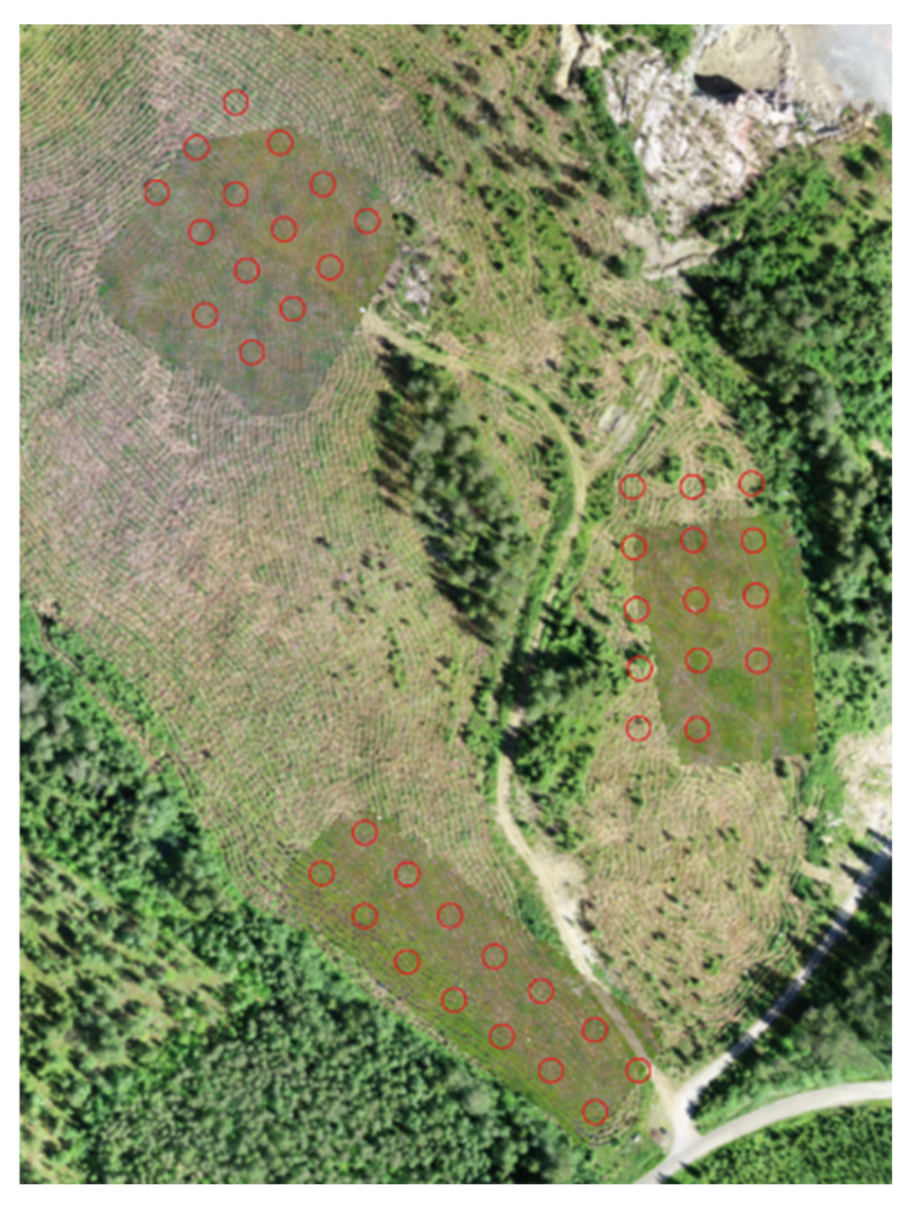
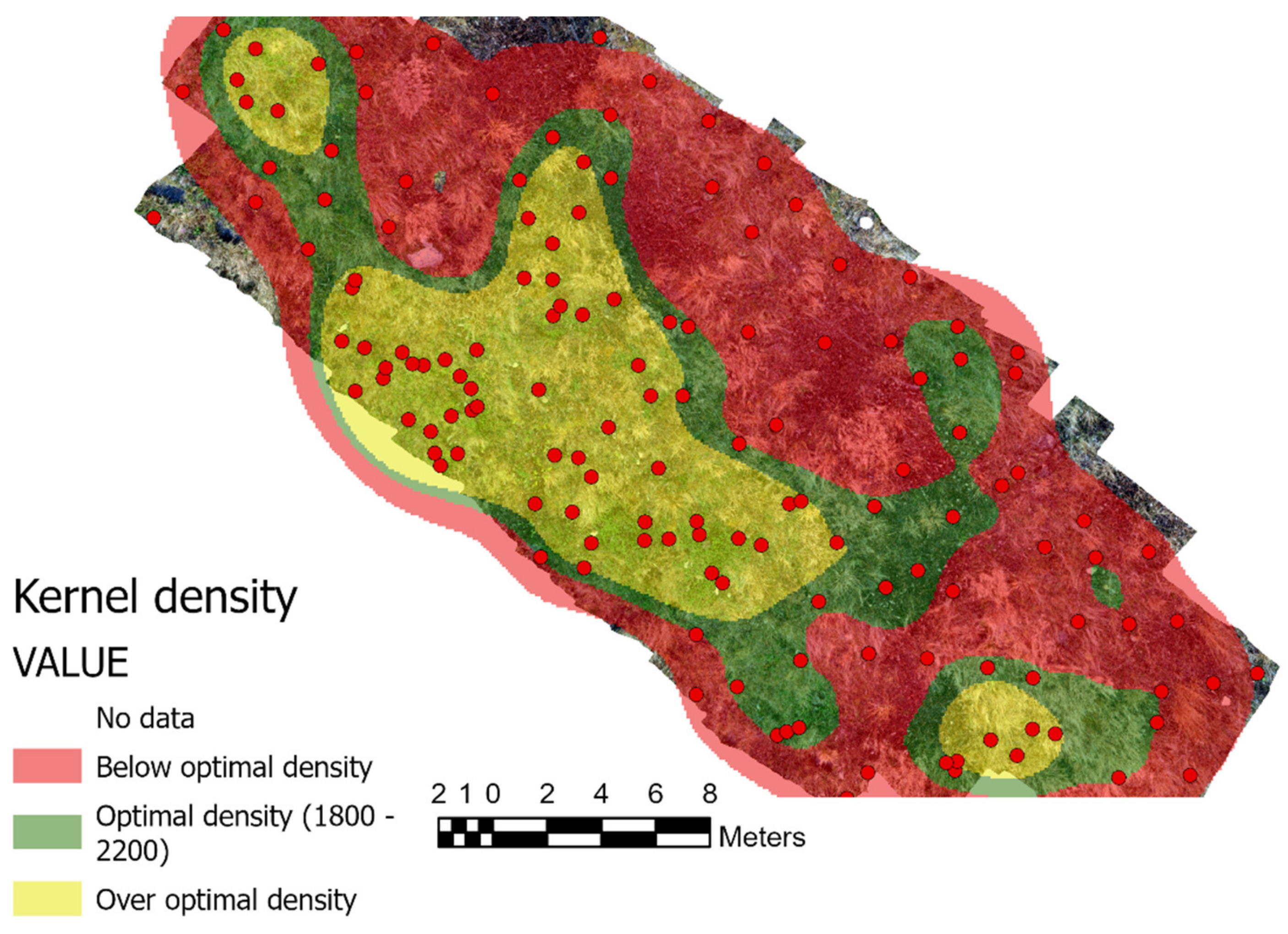
The standard planting density for spruce seedlings in Finland is 1800 per hectare, with some sites having a density of up to 2200 per hectare but never lower than 1800. The seedlings are usually evenly distributed after soil preparation, but, in some areas, natural regeneration combined with artificial planting can increase density. To identify sites with missing seedlings and achieve the target planting density of 1800 per hectare, we used kernel density estimation. The results are presented in
Figure 8, which shows an uneven distribution of the planted and naturally regenerated seedlings. Exceeding the target planting density would result in additional costs for the forest owner in terms of taking care of the young stand, while falling below the target could reduce the revenue from the land and the forest area’s capacity for carbon accumulation.
3.5. Comparing the Costs of Aerial Spruce Seedling Inventory Using Consumer Drones vs. Traditional Manual Field Inventory
Taking inventory of spruce seedlings is an essential task for forest managers to monitor the growth and health of their forests. Traditionally, this has been performed manually by field crews who walk through the forest, measuring and counting seedlings. However, recent advancements in drone technology have made it possible to perform an aerial inventory of spruce seedlings using consumer drones. Aerial inventories of spruce seedlings using consumer drones can cover a larger area of up to 30 hectares a day. This is achieved by using a drone equipped with a high-resolution camera, which can capture detailed images of the forest floor. From these images, it is possible to map up to 54,000 seedlings in a single day. The cost of this type of mapping is around EUR 300, which includes the bonus of a digital map showing the spatial distribution of the seedlings.
On the other hand, a traditional manual field inventory is limited to only 15 plots per day per person, with only 3000 randomly selected trees being measured. This method is time-consuming and labor-intensive, as a team of fieldworkers must walk through the forest and manually measure each seedling. Additionally, this method can be prone to errors, as human error and inconsistencies can occur when measuring and counting seedlings.
When comparing the costs of these two methods, aerial inventories using consumer drones are more cost-effective than traditional manual field inventories. Although the initial cost of purchasing a drone and training staff to operate it may seem significant, the long-term benefits and cost savings make it a worthwhile investment. With the ability to cover a larger area in less time, aerial inventories can help forest managers make better decisions about the health and growth of their forests, ultimately leading to increased productivity and profitability.
4. Discussion
The results of using the two-stage flight pattern for collecting very high-resolution data using a consumer drone are promising. By flying the drone at a higher altitude initially to generate an obstacle map, and then using that information to conduct a second flight at a lower altitude, the drone was able to avoid obstacles, such as larger trees, and collect very detailed data at a spatial resolution of 2.22 mm. This is a significant improvement in resolution compared to what can typically be achieved with a consumer drone.
The use of consumer drones for taking an aerial inventory of spruce seedlings is a more cost-effective and efficient method compared to traditional manual field inventories. With the ability to cover a larger area in less time, and the bonus of obtaining a digital map showing the spatial distribution of the seedlings, this method provides valuable insights for forest managers, ultimately leading to improved forest management practices.
The obstacle map generated at the higher-altitude flight allowed for safe flight at the lower altitude, which is essential for capturing fine details in the area of interest. The orthophoto mosaics created with this method can provide valuable information for a variety of applications, including agriculture, forestry, urban planning, and environmental monitoring.
It is important to note, however, that this approach may not be suitable for all areas and applications, as the success of the method is dependent on certain factors, such as the type of vegetation and the weather conditions. Nonetheless, this technique has the potential to enable high-resolution data collection in a cost-effective manner using consumer drones.
The results show that a seasonal approach to collecting drone imagery can significantly improve the accuracy of identifying spruce seedlings, particularly when considering the challenges of detecting them from low-flying altitudes due to the green colour of the background vegetation. The use of multispectral data may have been an alternative solution, but the project aimed to develop a cost-effective solution using consumer drones, making the selection of periods when the background vegetation would not affect the seedlings’ detection or when the seedlings were not covered by snow a viable option.
The results of the visual assessment and meteorological data analysis allowed for the identification of the best imaging time for taking seedling inventories in Finland. This information can be useful for forest managers wanting to optimize their operations and increase the efficiency of seedling inventorying. The approach can also provide an opportunity for cost-effective seedling detection, as it enables detection without the need for costly and time-consuming ground surveys.
The planted seedlings were not separated from naturally regenerated seedlings in this study due to age differences. However, it is important to use the possibility of separating these two types of seedlings in future research to assess the deep learning algorithm’s detection accuracy in each type. The performance of a deep learning algorithm for planted seedlings would be superior to that of naturally regenerated seedlings, but this assumption requires testing. Such research would provide a better understanding of the deep learning algorithm’s strengths and limitations in detecting different types of seedlings and would contribute to improving the accuracy and effectiveness of seedling detection in future studies.
The use of convolutional neural networks to detect planted spruce seedlings in UAV imagery proved successful, with an average precision score of 84% and a high detection accuracy of 97.86%. This result is comparable to a similar study carried out in Canada [
13]. The training process was relatively fast, taking only 44 min, and once the model was trained, the detection of planted seedlings took only 2 min per image mosaic. This indicates the reliability and accuracy of the developed model. Overall, the use of convolutional neural networks in this study has shown great potential for automating the detection of planted spruce seedlings in UAV imagery, providing a cost-effective and efficient solution for forest inventory and management.
The results reveal an uneven distribution of planted and naturally regenerated spruce seedlings across the study area. The kernel density estimation technique was able to identify areas where the seedling density was lower than the standard planting density of 1800 per hectare. This information can be useful for forest owners to add additional seedlings to the identified areas to achieve the target planting density. On the other hand, exceeding the target planting density can result in additional costs for the forest owner to maintain the young stand. Furthermore, falling below the target density level can lead to a reduction in the revenue generated from the land and decrease the capacity of the forest area to accumulate carbon. Therefore, the results of this study provide valuable information for forest management and decision making, enabling forest owners to optimize planting density to achieve their goals while maximizing the benefits from their land.
The results of the study indicate that the two-stage flight pattern developed in this research is an effective method for collecting very high-resolution data using a consumer drone. By conducting the initial flight at a higher altitude to generate an obstacle map, and then conducting a lower altitude flight, the drone can avoid obstacles, such as larger trees, and collect very detailed data at a spatial resolution of 2.22 mm, which is a significant improvement compared to what can typically be achieved with a consumer drone.
The study also demonstrates the potential of consumer drones for the aerial inventory of spruce seedlings, providing a more cost-effective and efficient method compared to traditional manual field inventory. This method provides valuable insights for forest managers, ultimately leading to improved forest management practices. The results of the study also identify the best imaging time for UAV-based seedling inventory in Finland, which can be useful for forest managers to optimize their operations and increase the efficiency of taking seedling inventories.
The use of convolutional neural networks to detect planted spruce seedlings in UAV imagery also proved successful, with a high detection accuracy of 97.86%. The use of kernel density estimation helped to identify areas with missing seedlings, which is important for both economic and ecological reasons. The study demonstrates the potential of the two-stage UAV flight pattern and deep learning techniques for efficient and cost-effective seedling inventory, providing valuable insights for forest managers and decision makers.
The results of this study were compared to those of similar studies that focused on detecting coniferous seedlings from UAV imagery [
13,
24,
25,
26]. It was found that using two-stage flights and convolutional neural networks improved the detection rate to 97.96%. This is a significant improvement compared to previous studies, such as [
24], which reported a seedling detection rate of only 75.8%.
The study has several limitations that should be considered. Firstly, the success of the two-stage flight pattern for collecting high-resolution data using a consumer drone is dependent on various factors, such as the type of vegetation and weather conditions, and this approach may not be suitable for all areas and applications. This limitation highlights that the method may not be applicable to other types of vegetation, and its success may depend on the weather conditions and the type of terrain. Secondly, while the seasonal approach for collecting drone imagery is cost-effective and efficient for identifying spruce seedlings, it may not work for all types of vegetation and may not be optimal for detecting other types of features. Thirdly, the use of convolutional neural networks to detect spruce seedlings is based on the availability of training data and may not be applicable to other types of vegetation or features. This limitation highlights that the method may not be suitable for detecting other types of vegetation or features. The study’s geographic scope is limited to Finland, and the results may not be generalizable to other locations.
Based on the results of the research on taking spruce seedling inventories using two-stage UAV flights and deep learning, future research could focus on the following areas:
Testing the proposed approach in different types of vegetation: The current study was conducted in a spruce forest, and it is important to investigate whether the approach can be applied to different types of vegetation with varying background colors.
Expanding the study to a larger area: The current study was conducted in a relatively small study area (30 ha), and it would be valuable to investigate whether the approach can be applied to larger areas and whether it is scalable.
Investigating the effect of weather conditions: The success of the two-stage UAV flight approach is dependent on favorable weather conditions. Future research could investigate the effect of different weather conditions on the approach’s success and determine whether it can be applied in areas with harsh weather conditions.
Investigating the use of other deep learning models: The current study used a convolutional neural network (CNN) to detect planted spruce seedlings. Future research could investigate the use of other deep learning models, such as recurrent neural networks (RNNs) and deep belief networks (DBNs), and then compare their performance with that of CNNs.
Investigating the application of the approach in other domains: The two-stage UAV flight approach and deep learning network can be applied in various domains, such as agriculture, environmental monitoring, and urban planning. Future research could investigate the application of this approach in these domains and compare its performance with traditional methods.
Investigating the use of other sensors: The current study used an RGB camera to collect UAV imagery. Future research could investigate the use of other sensors, such as hyperspectral, LiDAR, and thermal cameras to collect more information about the area of interest and improve the accuracy of the approach.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







