
Estimation of Coarse Root System Diameter Based on Ground-Penetrating Radar Forward Modeling


Abstract
:1. Introduction
2. Materials and Methods
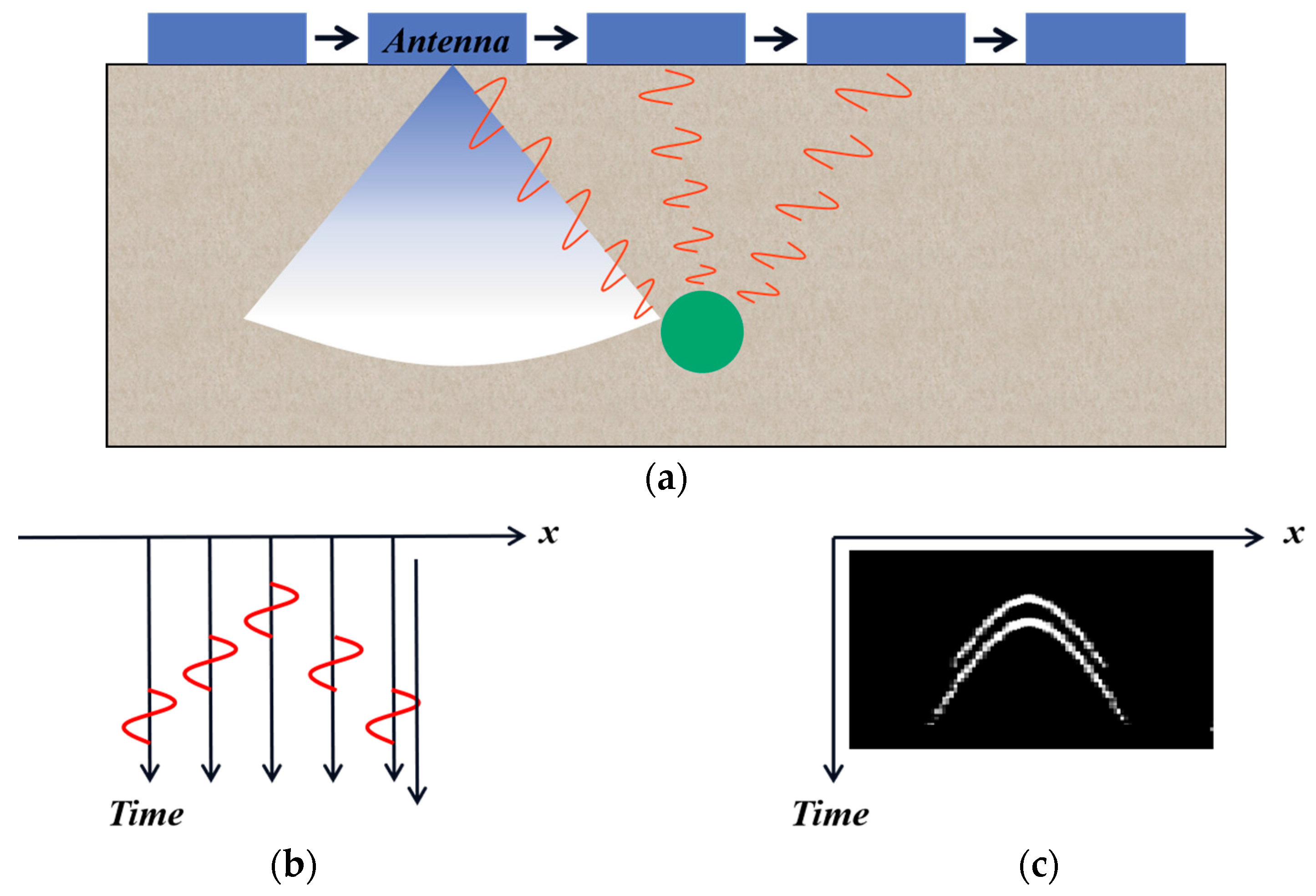
2.1. Theoretical Basis of GPR
2.2. Theoretical Basis of gprMax Forward Modeling
2.3. Experimental Design
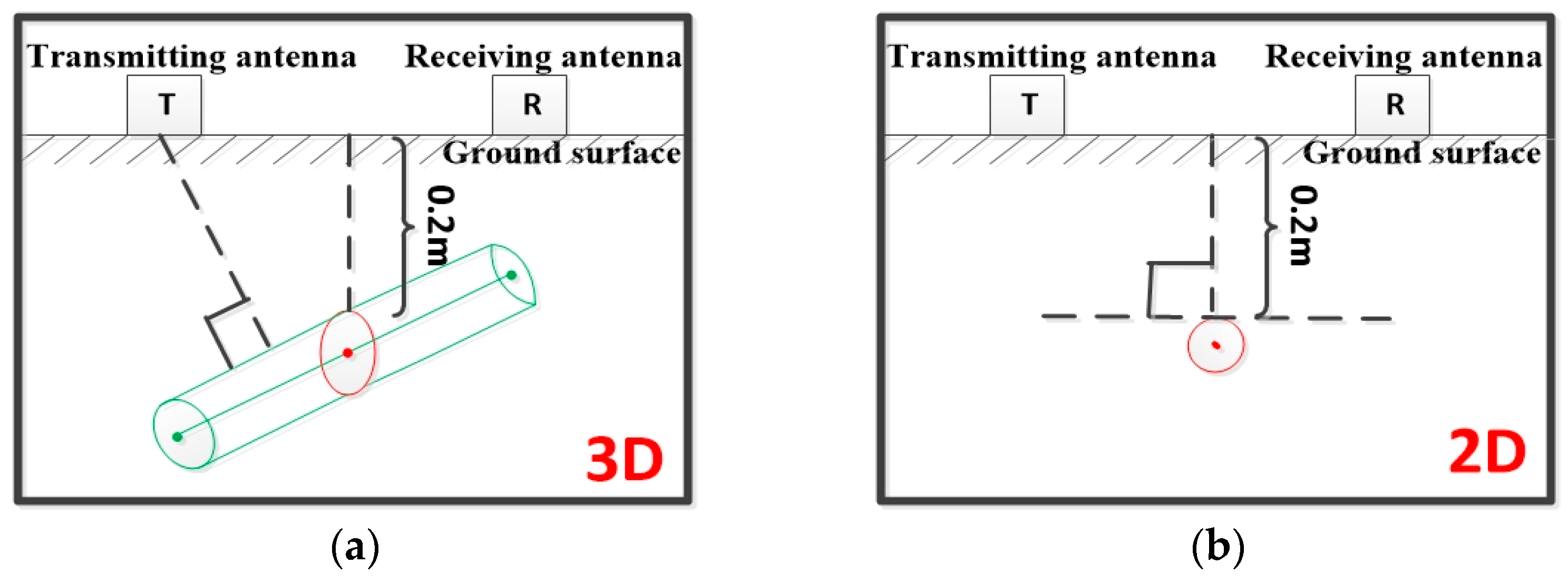
2.3.1. Tree Root Forward Simulation
2.3.2. Relative Permittivity of the Tree Root and Soil Design
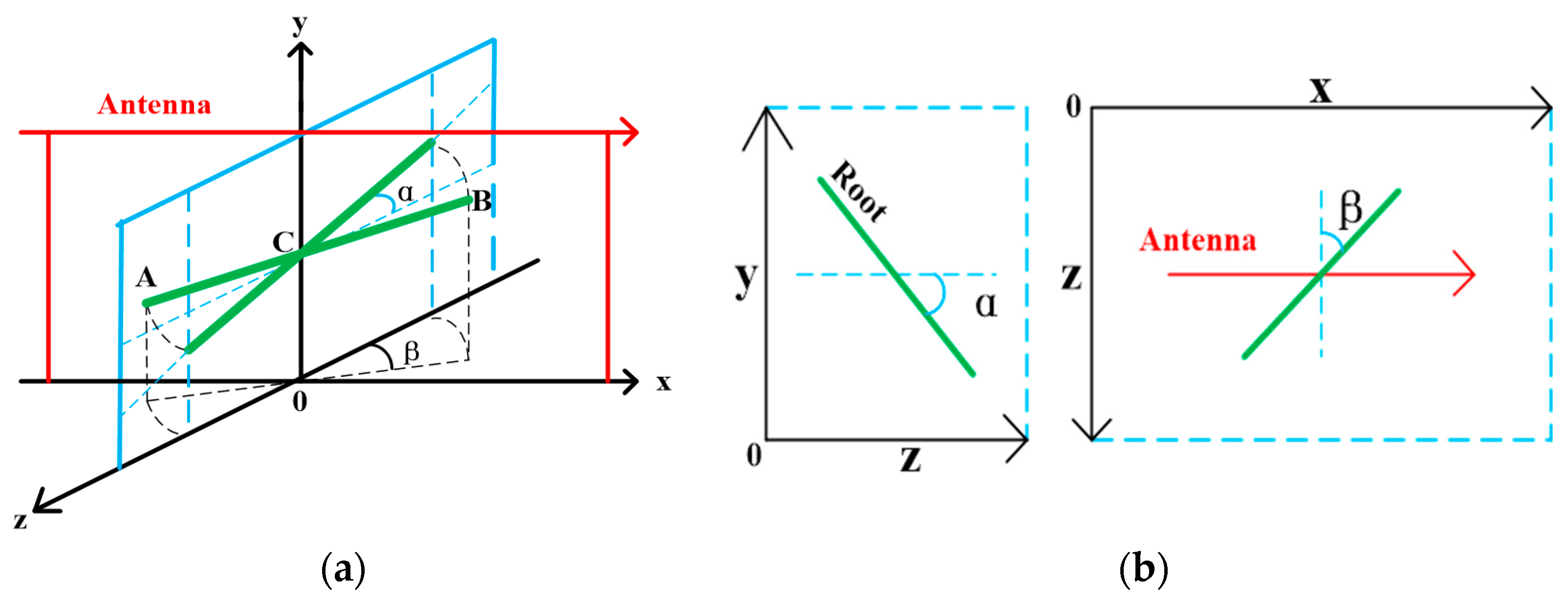
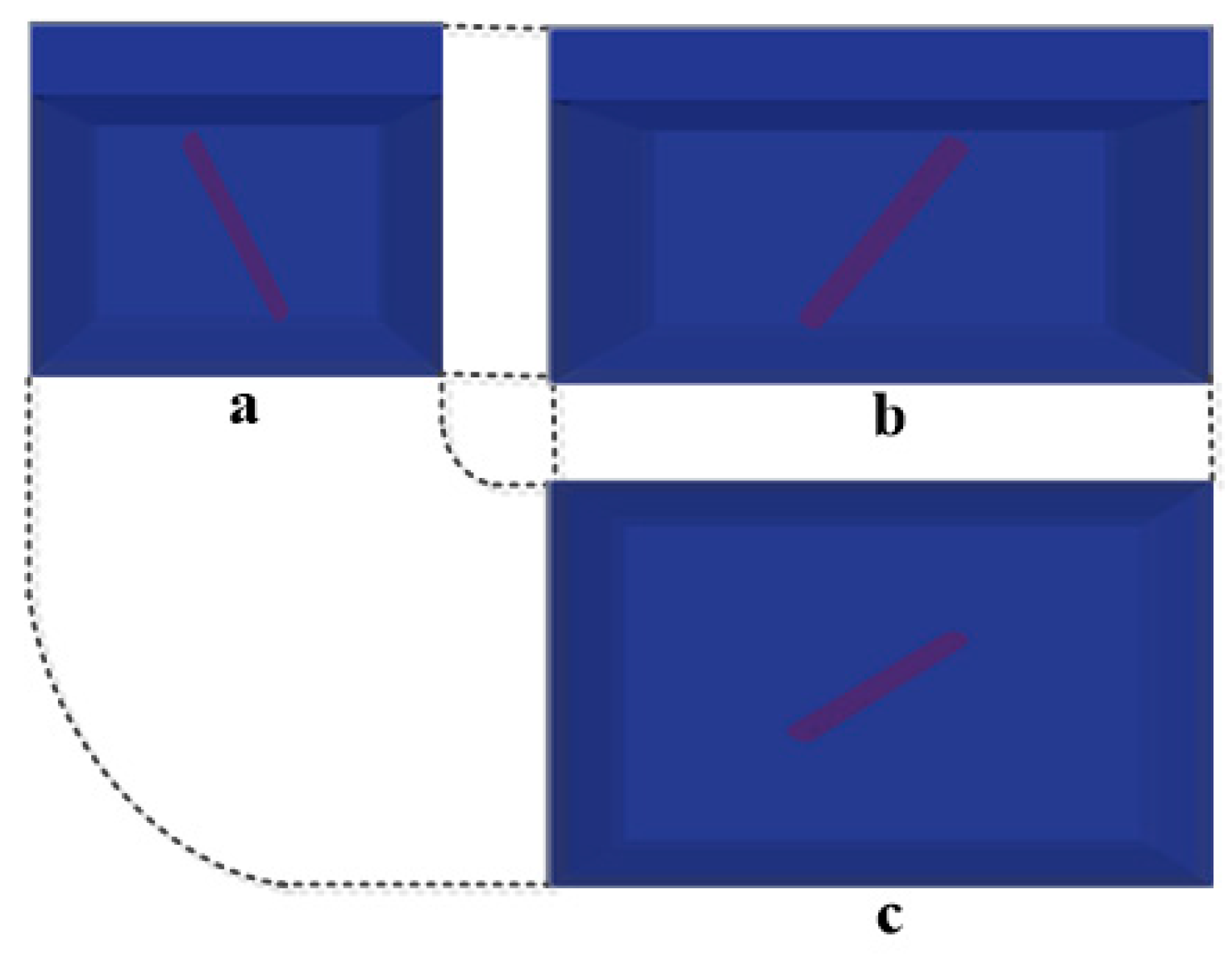
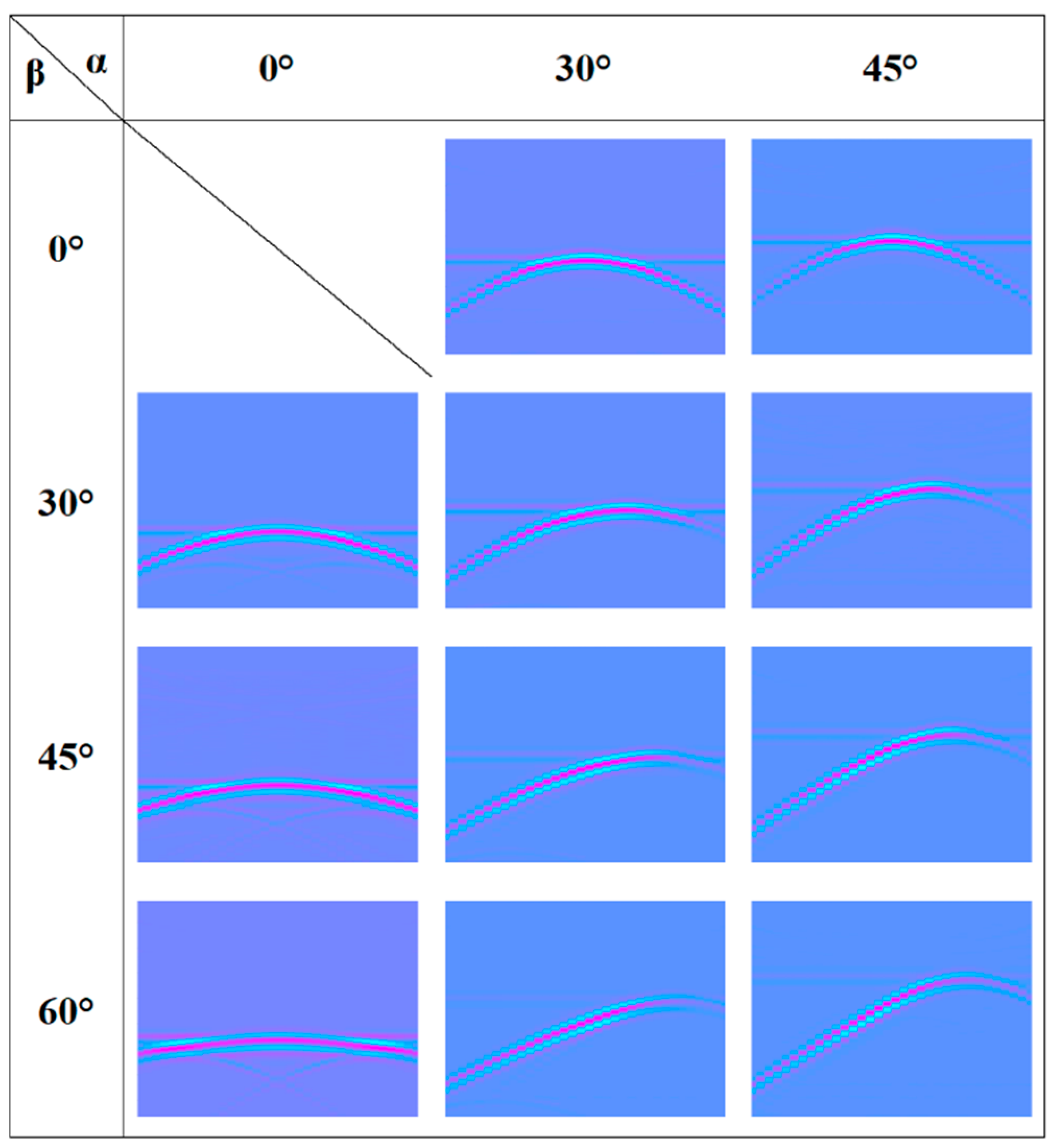
2.3.3. Tree Root Orientation Design
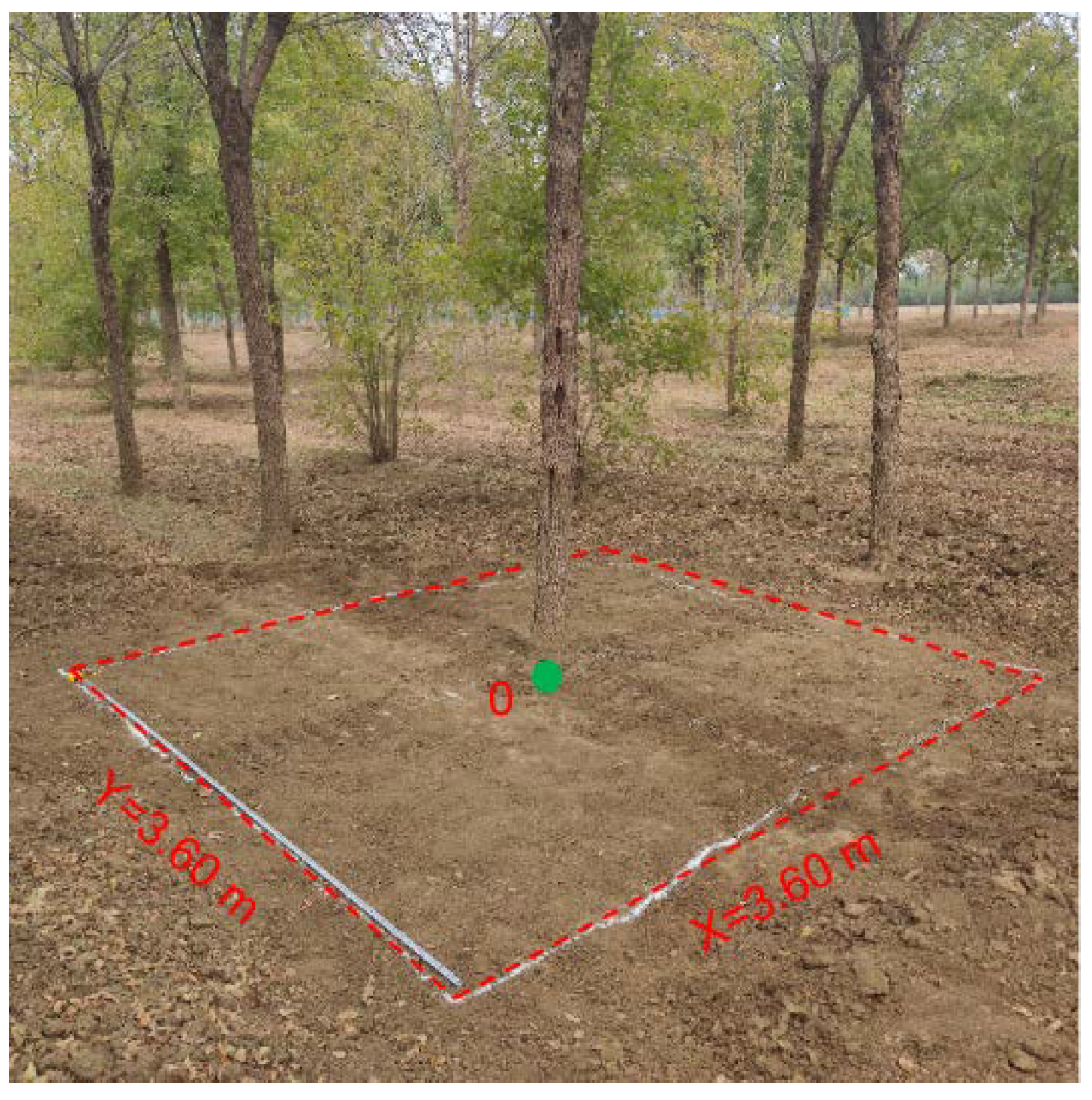
2.3.4. Field Experiment
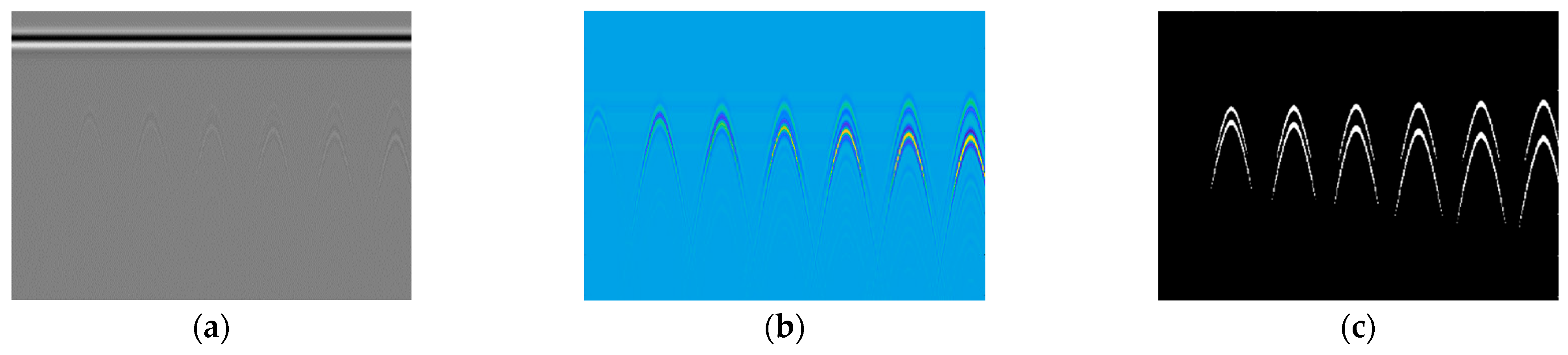
2.4. Data Preprocessing
3. Results
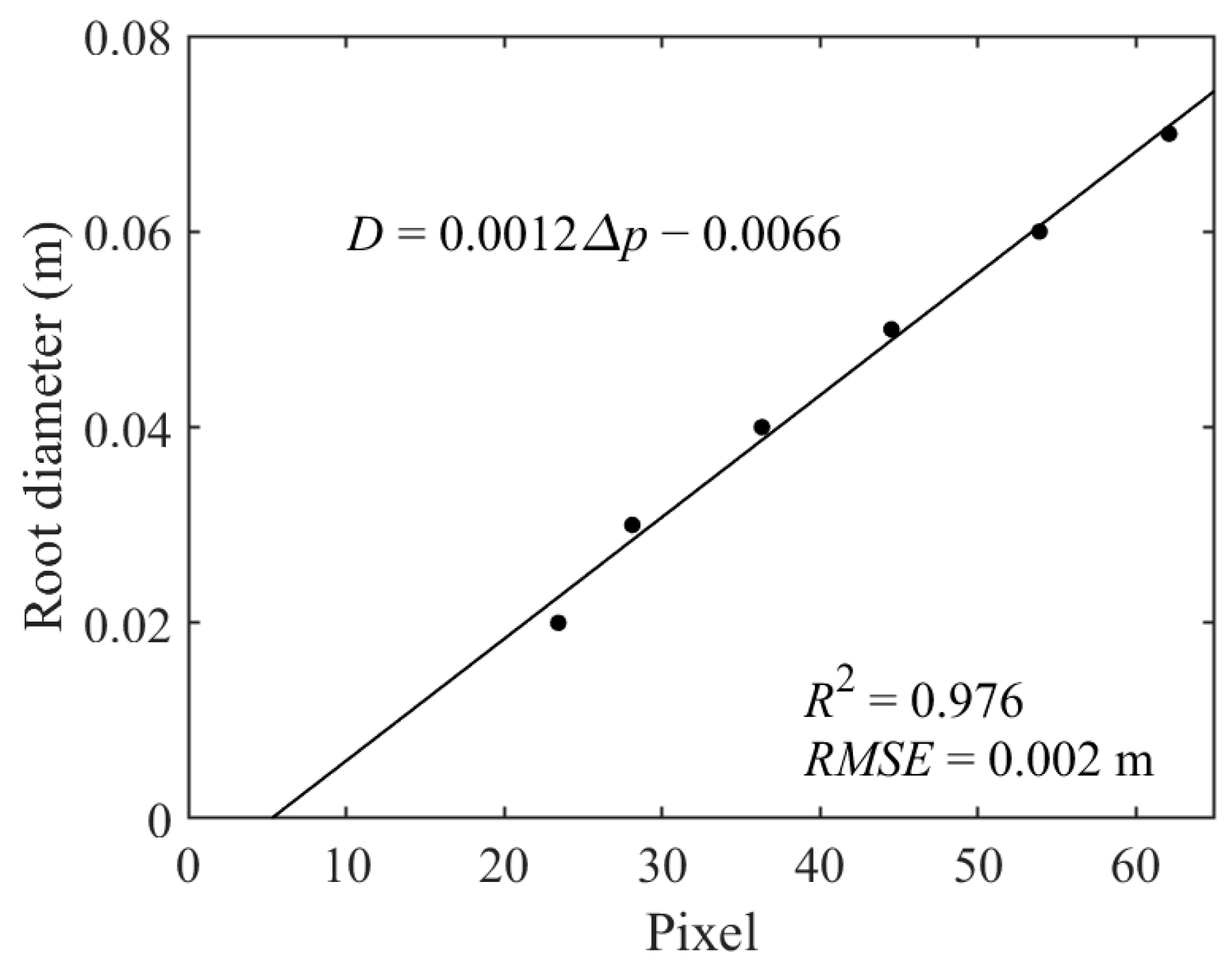
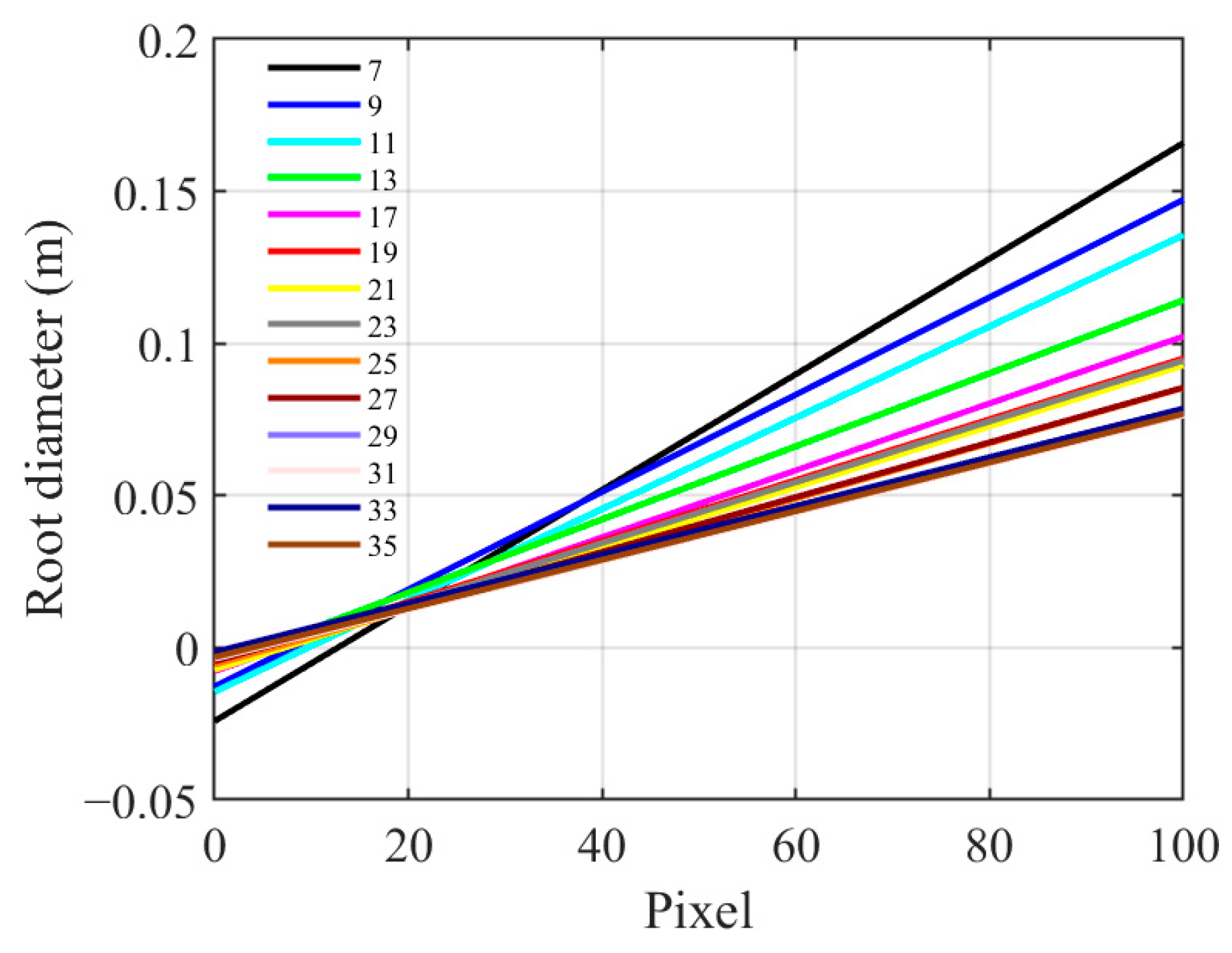
3.1. Relationship between Root Diameter and Pixel Distance
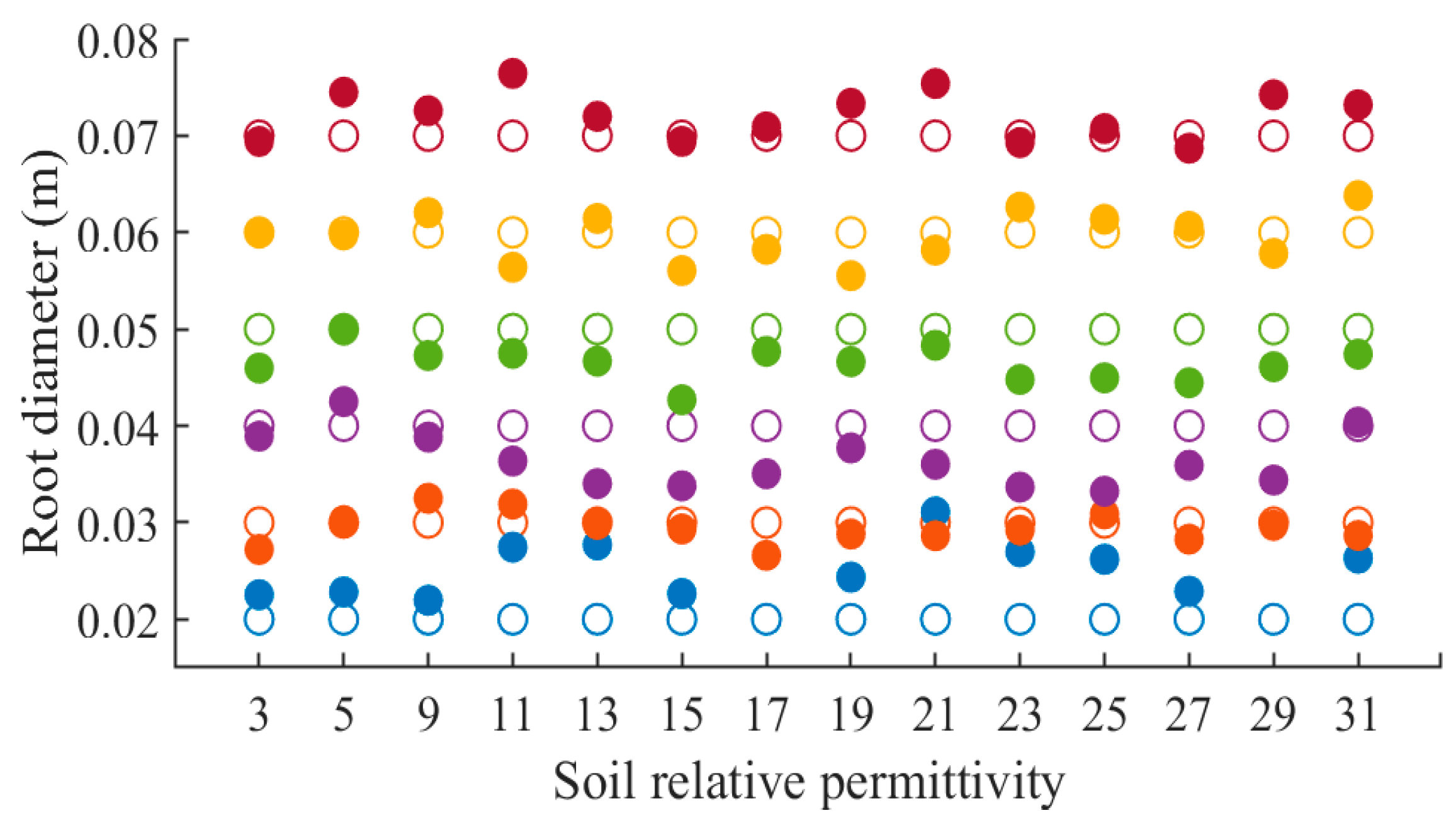
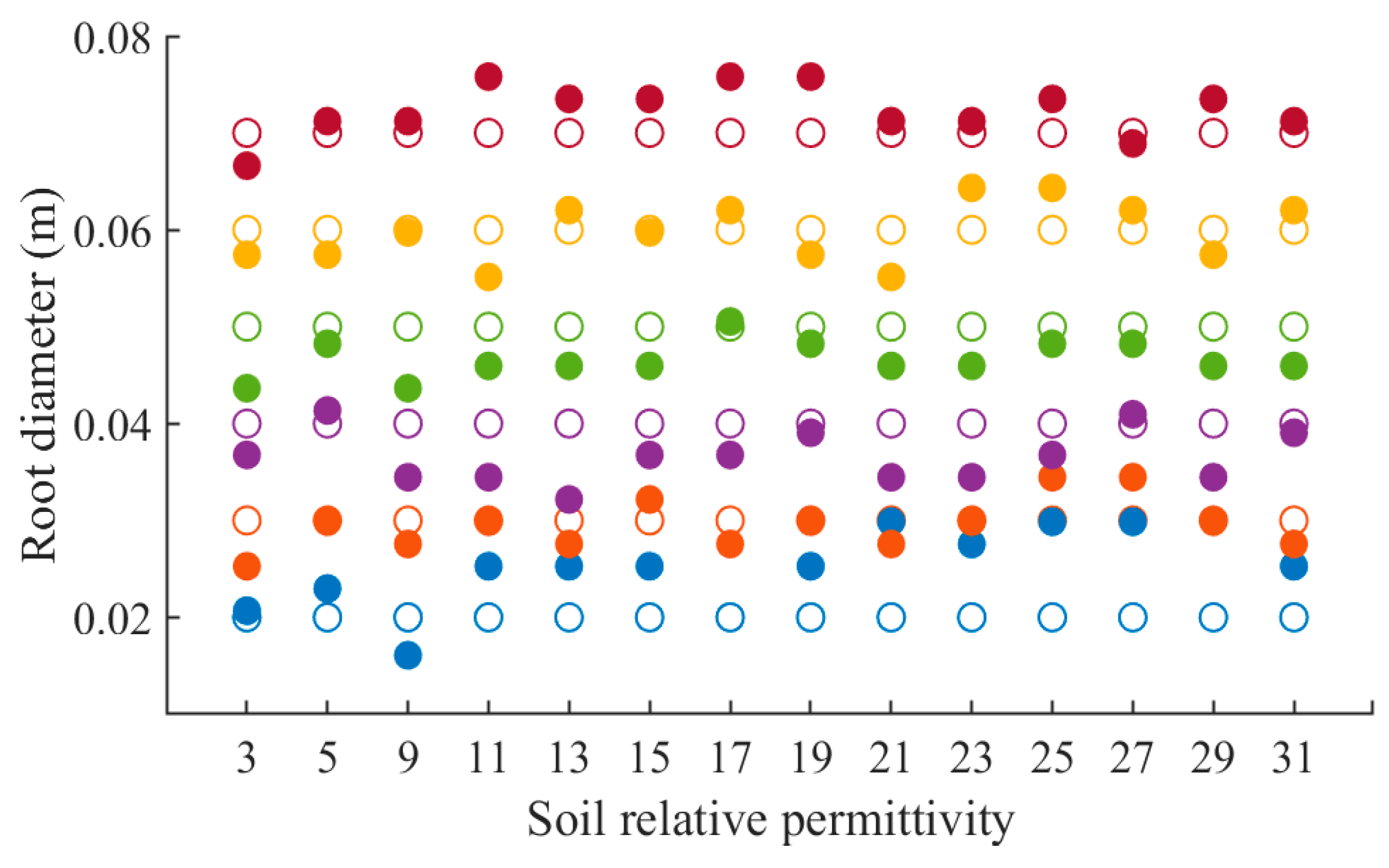
3.2. Effects of Relative Permittivity of the Tree Root and Soil on Modeling Tree Root Diameter
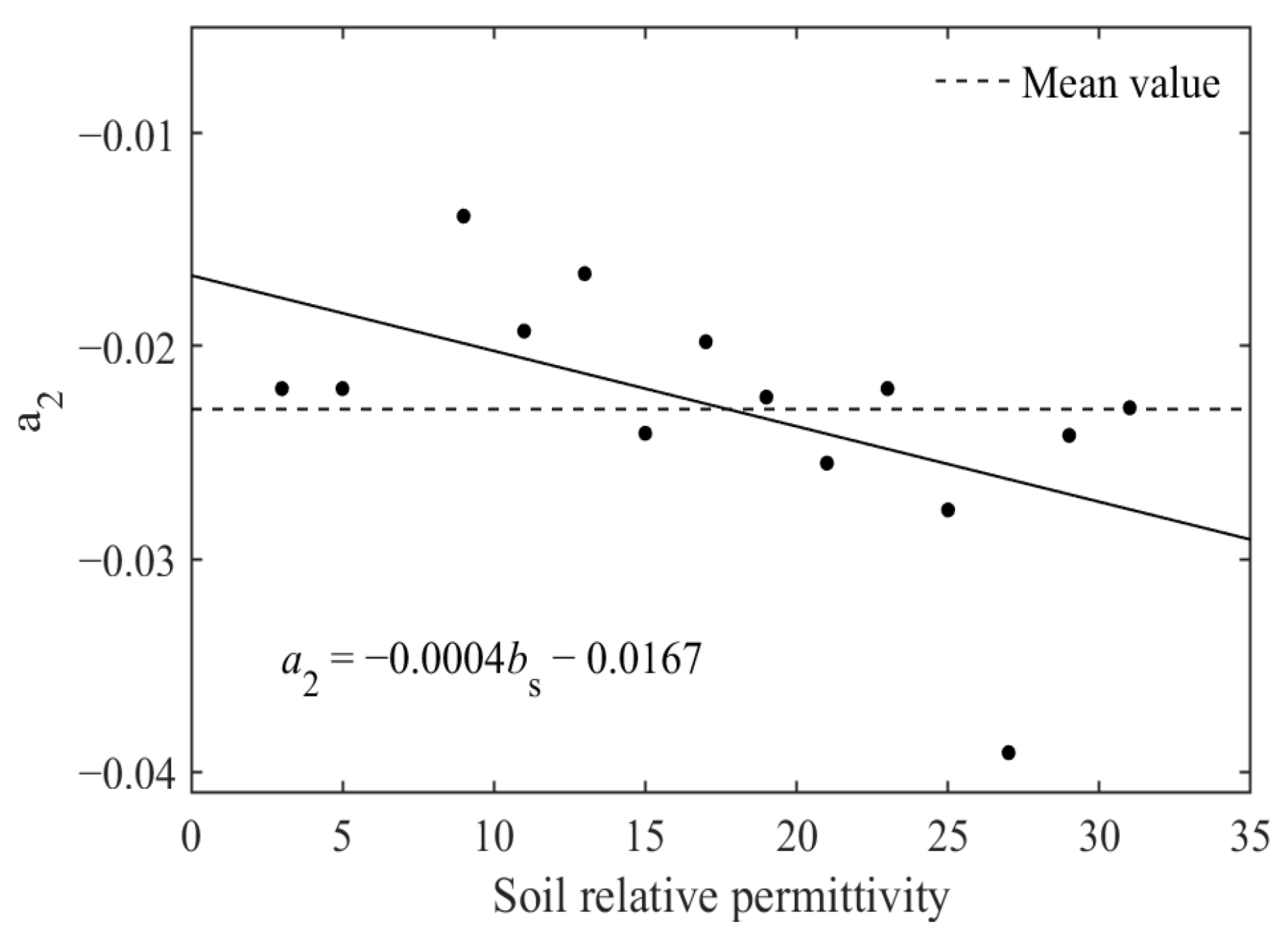
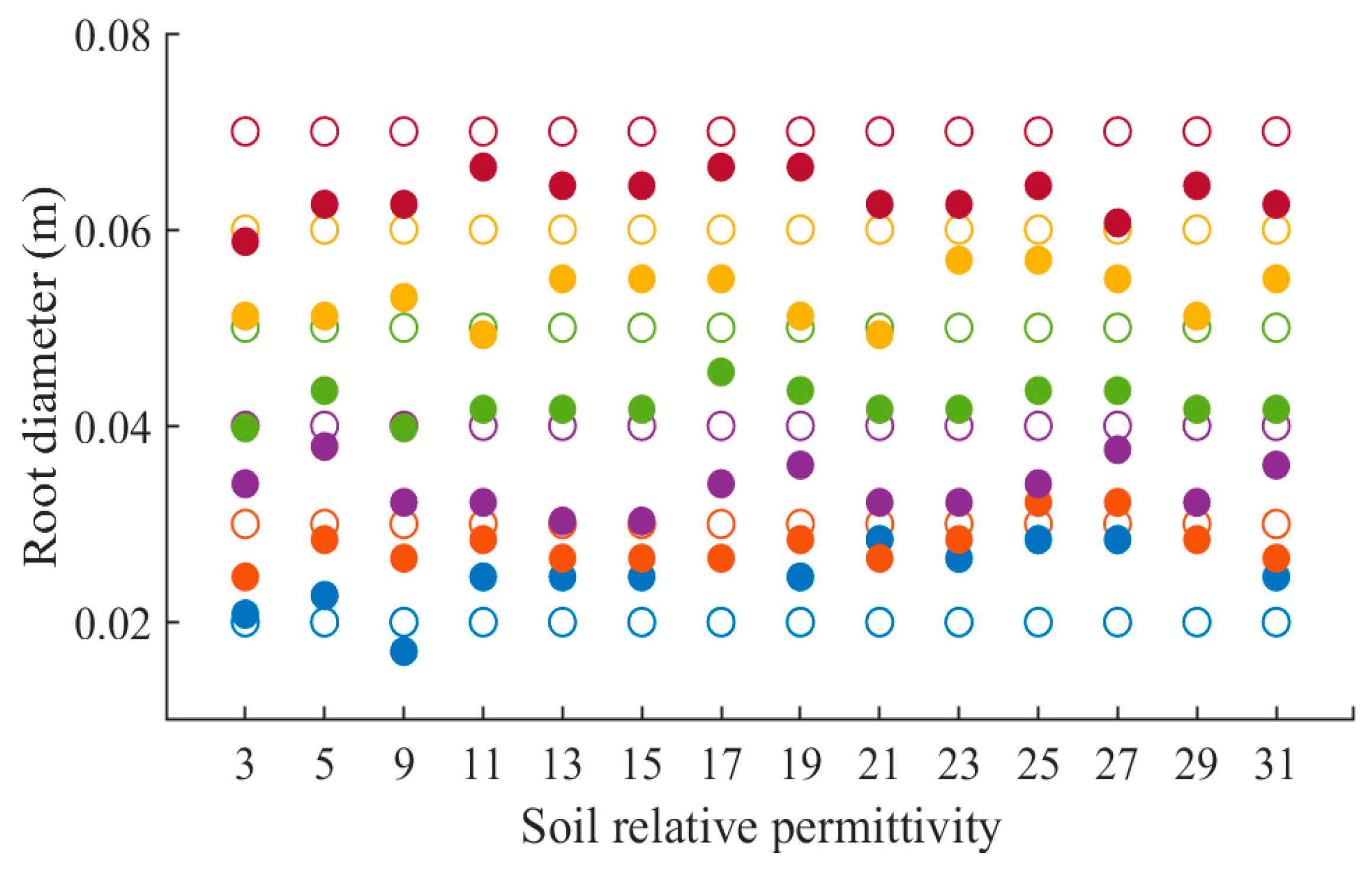
3.2.1. Relationship between Soil Relative Permittivity and Root Diameter Estimation Equation
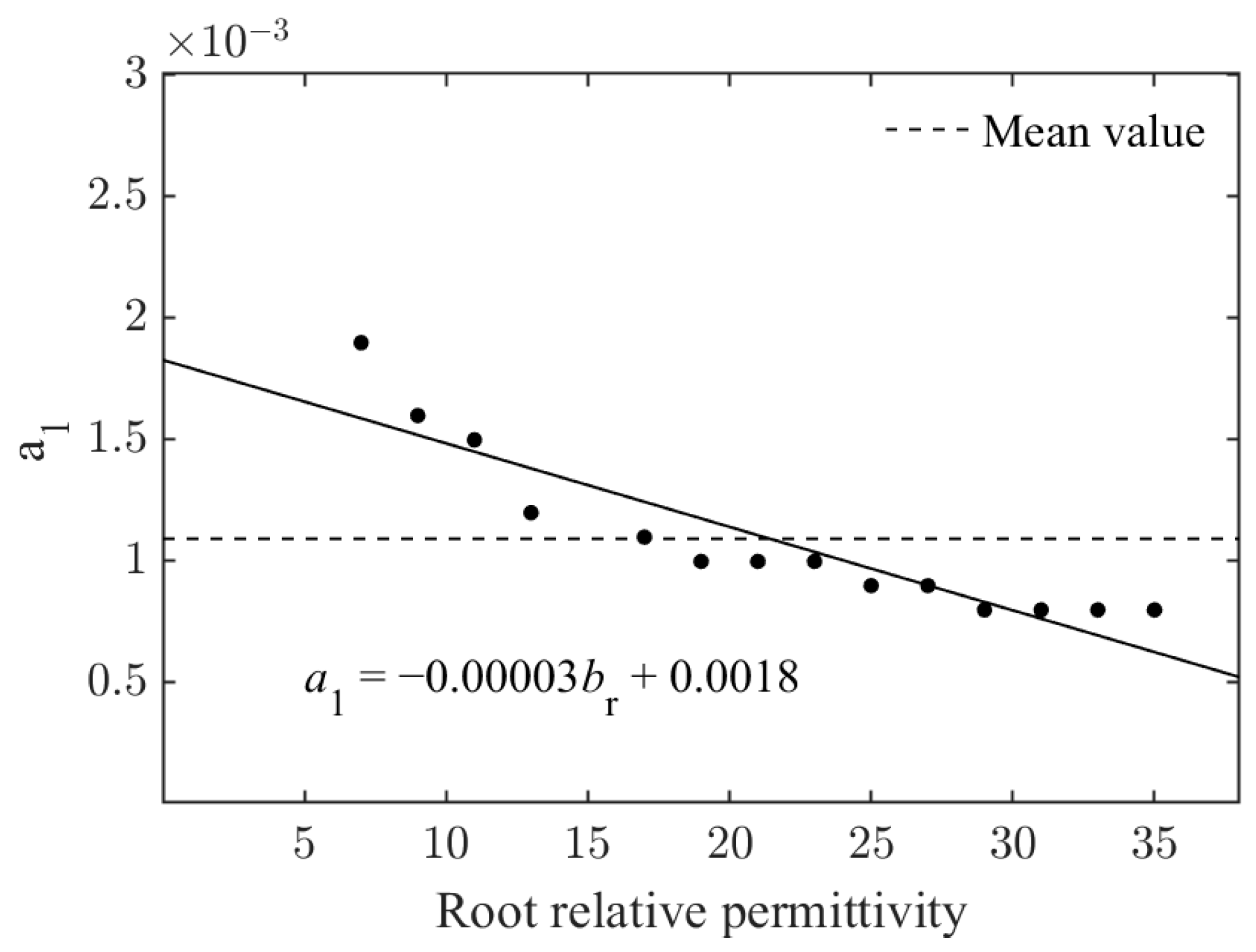
3.2.2. Relationship between Relative Permittivity of Root System and Root Diameter Estimation Equation
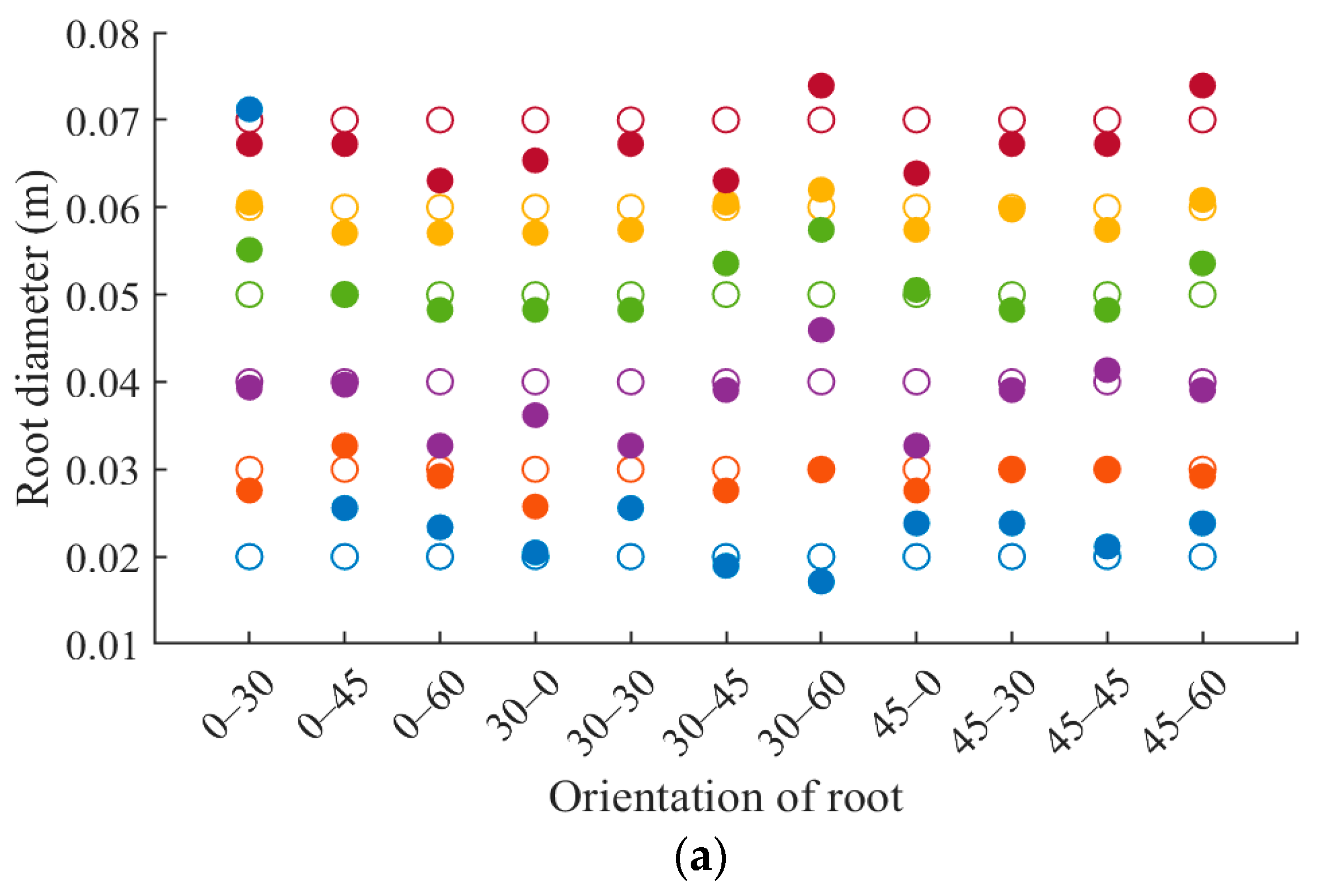
3.3. Feasibility of Applying Diameter Estimation Model to Tree Roots of Different Orientations
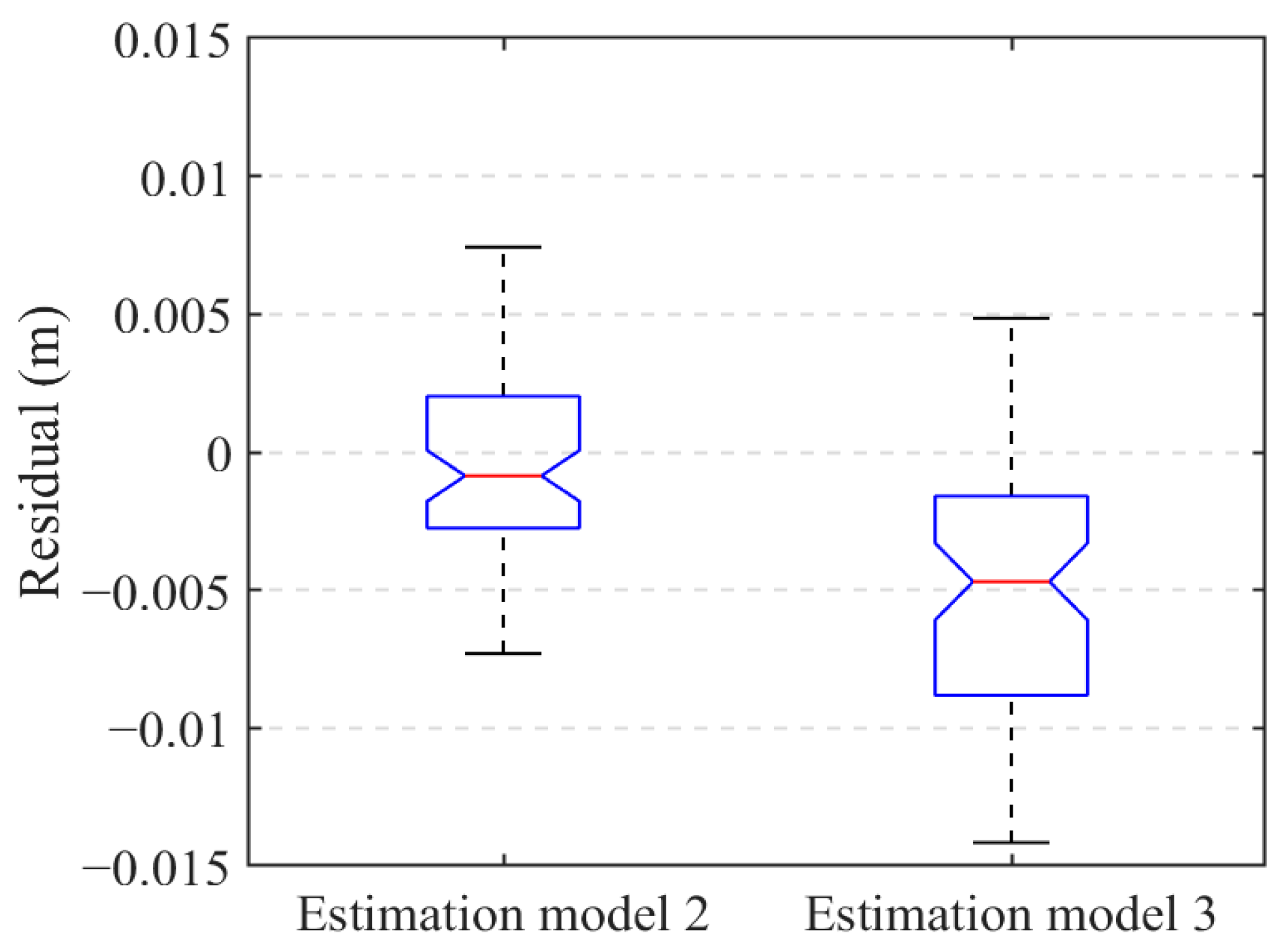
3.4. Feasibility of Applying Diameter Estimation Model to the Field Tree Root
4. Discussion
5. Conclusions
- (1)
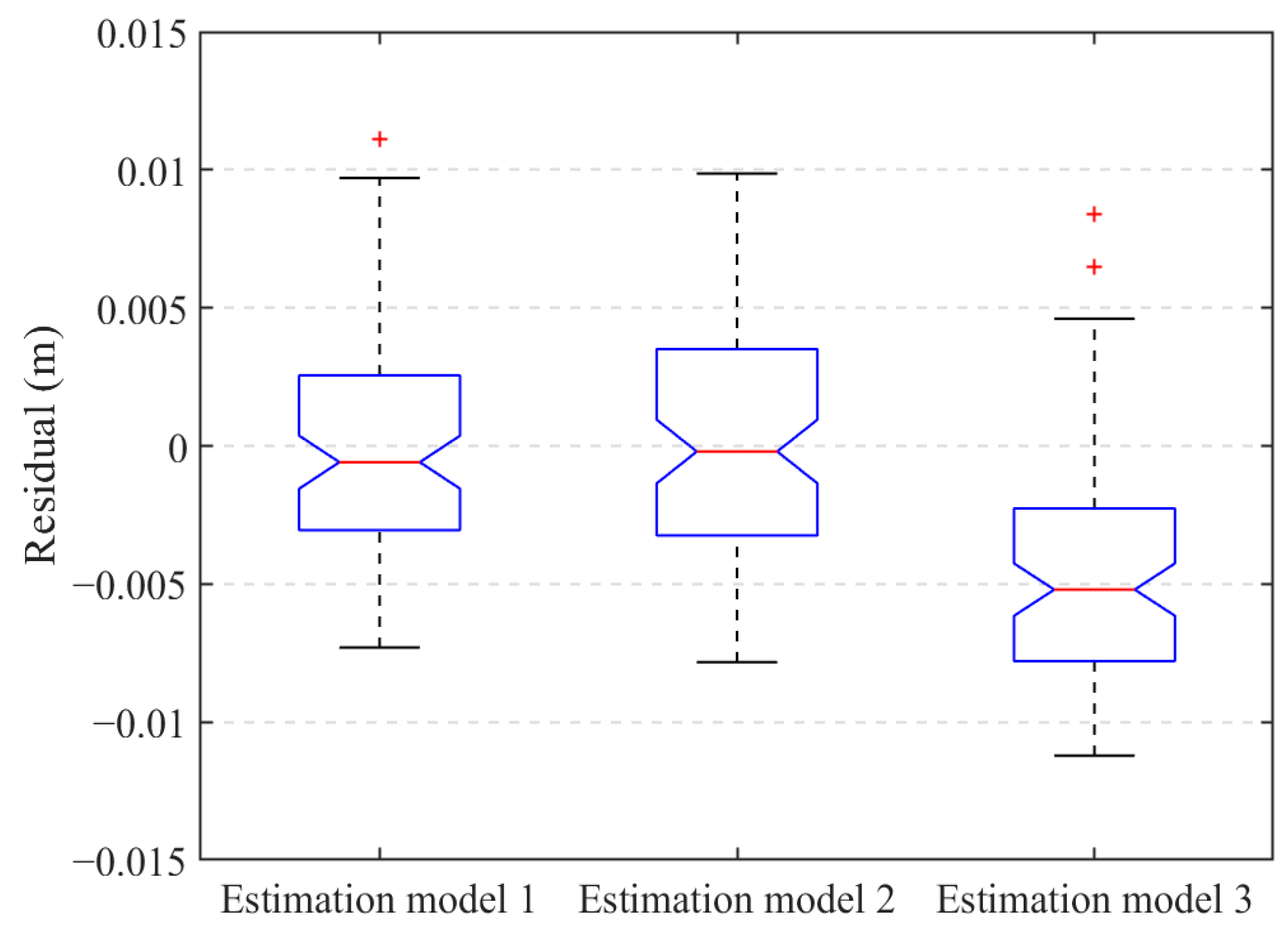
- The ∆p corresponds to ∆T, which is influenced by the root’s relative permittivity but not by its depth. Therefore, a diameter estimation model that is not affected by signal strength can be established.
- (2)
- The proposed model can estimate coarse roots with a diameter of no less than 0.02 m and a relative permittivity of no less than 7. The model is simple and stable, making it a reliable option for estimating coarse root diameters.
- (3)
- This method can estimate root diameter under any conditions of soil relative permittivity and growth angle. The estimation of coarse root diameter provides an experimental basis and data support for the healthy growth of trees, while also offering valuable information for the study of coarse root ecology.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gill, R.A.; Jackson, R.B. Global patterns of root turnover for terrestrial ecosystems. New Phytol. 2000, 147, 13–31. [Google Scholar] [CrossRef]
- Sun, P.; Li, J.; Liu, H.; Wu, J.; Liu, C.; Xu, C. Relationship between root structure and health level of Cotius coggygria trees. J. Northwest For. Univ. 2016, 31, 20–27. [Google Scholar] [CrossRef]
- Danjon, F.; Stokes, A.; Bakker, M.R. Root Systems of Woody Plants. Plant Roots 2013, 29, 1–26. [Google Scholar] [CrossRef]
- McCormack, M.L.; Dickie, I.A.; Eissenstat, D.M.; Fahey, T.J.; Fernandez, C.W.; Guo, D.; Helmisaari, H.S.; Hobbie, E.A.; Iversen, C.M.; Jackson, R.B.; et al. Redefining fine roots improves understanding of belowground contributions to terrestrial biosphere processes. New Phytol. 2015, 207, 505–518. [Google Scholar] [CrossRef]
- McCormack, M.L.; Guo, D.; Iversen, C.M.; Chen, W. Building a better foundation: Improving root trait measurements to understand and model plant and ecosystem processes. New Phytol. 2017, 215, 27–37. [Google Scholar] [CrossRef] [Green Version]
- Brunner, I.; Godbold, D.L. Tree roots in a changing world. J. For. Res. 2007, 12, 78–82. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Fan, B.; Wu, Y.; Li, W.; Cui, X.; Chen, J. A review on the application of ground penetrating radar to detect and quantify coarse roots. China Sci. 2014, 9, 494–498. [Google Scholar] [CrossRef]
- Alani, A.M.; Lantini, L. Recent advances in tree root mapping and assessment using non-destructive testing methods: A focus on ground penetrating radar. Surv. Geophys. 2019, 41, 605–646. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Q.; Guo, Y.; Xing, T.; Wang, F.; Gao, X.; Wu, J. Study on the coarse root biomass and distribution characteristics about natural Larix gmelinii forest. For. Resour. Manag. 2013, 5, 62–66. [Google Scholar] [CrossRef]
- Cui, X.; Chen, J.; Shen, J.; Cao, X.; Chen, X.; Zhu, X. Modeling tree root diameter and biomass by ground-penetrating radar. Sci. China Earth Sci. 2010, 54, 711–719. [Google Scholar] [CrossRef]
- Alani, A.M.; Ciampoli, L.B.; Lantini, L.; Tosti, F.; Benedetto, A. Mapping the root system of matured trees using ground penetrating radar. In Proceedings of the 2018 17th International Conference on Ground Penetrating Radar (GPR), Rapperswil, Switzerland, 18–21 June 2018. [Google Scholar] [CrossRef]
- Ohashi, M.; Ikeno, H.; Sekihara, K.; Tanikawa, T.; Dannoura, M.; Yamase, K.; Todo, C.; Tomita, T.; Hirano, Y. Reconstruction of root systems in Cryptomeria japonica using root point coordinates and diameters. Planta 2018, 249, 445–455. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Guo, L.; Cui, X.; Chen, J.; Cao, X.; Lin, H. Ground-penetrating radar-based automatic reconstruction of three-dimensional coarse root system architecture. Plant Soil 2014, 383, 155–172. [Google Scholar] [CrossRef]
- Yu, B.; Xie, C.; Cai, S.; Yan, C.; Lv, Y.; Mo, Z.; Liu, T.; Yang, Z. Effects of Tree Root Density on Soil Total Porosity and Non-Capillary Porosity Using a Ground-Penetrating Tree Radar Unit in Shanghai, China. Sustainability 2018, 10, 4640. [Google Scholar] [CrossRef] [Green Version]
- Cui, X.; Chen, J.; Guan, L. The application of ground penetrating radar to plant root system detection. Adv. Earth Sci. 2009, 24, 606–611. [Google Scholar] [CrossRef]
- Laclau, J.P.; Arnaud, M.; Bouillet, J.P.; Ranger, J. Spatial distribution of Eucalyptus roots in a deep sandy soil in the Congo: Relationships with the ability of the stand to take up water and nutrients. Tree Physiol. 2001, 21, 129–136. [Google Scholar] [CrossRef] [Green Version]
- Rajab, Y.A.; Hölscher, D.; Leuschner, C.; Barus, H.; Tjoa, A.; Hertel, D. Effects of shade tree cover and diversity on root system structure and dynamics in cacao agroforests: The role of root competition and space partitioning. Plant Soil 2018, 422, 349–369. [Google Scholar] [CrossRef]
- Zhou, Z.; Shangguan, Z. Vertical distribution of fine roots in relation to soil factors in Pinus tabulaeformis Carr. forest of the Loess Plateau of China. Plant Soil 2007, 291, 119–129. [Google Scholar] [CrossRef]
- Zhang, X.; Huang, X.; Xin, Z.; Kong, Q.; Jiang, Q. Distribution characteristics and its influencing factors of understory vegetation roots under the typical plantations in mountainous area of Beijing. J. Beijing For. Univ. 2018, 40, 51–57. [Google Scholar] [CrossRef]
- Butnor, J.R.; Doolittle, J.A.; Johnsen, K.H.; Samuelson, L.; Stokes, T.; Kress, L. Utility of ground-penetrating radar as a root biomass survey tool in forest systems. J. Soil Sci. Soc. Am. 2003, 67, 1607–1615. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Cui, X.; Chen, J. Sensitive factors analysis in using GPR for detecting plant roots based on forward modeling. Prog. Geophys. 2012, 27, 1754–1763. [Google Scholar] [CrossRef]
- Zeng, S.; Liu, S.; Wang, Z.; Xue, J. Principle and Application of Ground Penetrating Radar Method; Science Press: Beijing, China, 2006. [Google Scholar]
- Li, J.; Guo, C.; Wang, F.; Zhang, J. The summary of the surface ground penetrating radar applied in subsurface investigation. Prog. Geophys. 2007, 22, 629–637. [Google Scholar] [CrossRef]
- Daniels, D.J. Ground Penetrating Radar; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar] [CrossRef] [Green Version]
- Youn, H.; Chen, C. Neural detection for buried pipe using fully polarimetric GPR. In Proceedings of the Tenth International Conference on Grounds Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; Volume 1, pp. 303–306. [Google Scholar]
- Jol, H.M. Ground Penetrating Radar: Theory and Applications, 5th ed.; Elsevier: Amsterdam, The Netherlands, 2009; pp. 509–524. [Google Scholar] [CrossRef]
- Sato, M.; Yokota, Y.; Takahashi, K.; Grasmueck, M. Landmine detection by 3D GPR system. Spie Def. Secur. Sens. 2012, 8357, 835710. [Google Scholar] [CrossRef] [Green Version]
- Hirano, Y.; Yamamoto, R.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Detection frequency of Pinus thunbergii roots by ground-penetrating radar is related to root biomass. Plant Soil 2012, 360, 363–373. [Google Scholar] [CrossRef]
- Guo, L.; Lin, H.; Fan, B.; Cui, X.; Chen, J. Impact of root water content on root biomass estimation using ground penetrating radar: Evidence from forward simulations and field controlled experiments. Plant Soil 2013, 371, 503–520. [Google Scholar] [CrossRef]
- Isaac, M.E.; Anglaaere, L.C.N. An in situ approach to detect tree root ecology: Linking ground-penetrating radar imaging to isotope-derived water acquisition zones. Ecol. Evol. 2013, 3, 1330–1339. [Google Scholar] [CrossRef] [PubMed]
- Tanikawa, T.; Hirano, Y.; Dannoura, M.; Yamase, K.; Aono, K.; Ishii, M.; Igarashi, T.; Ikeno, H.; Kanazawa, Y. Root orientation can affect detection accuracy of ground-penetrating radar. Plant Soil 2013, 373, 317–327. [Google Scholar] [CrossRef]
- Isaac, M.E.; Anglaaere, L.C.N.; Borden, K.; Adu-Bredu, S. Intraspecific root plasticity in agroforestry systems across edaphic conditions. Agric. Ecosyst. Environ. 2014, 185, 16–23. [Google Scholar] [CrossRef]
- Raz-Yaseef, N.; Koteen, L.; Baldocchi, D.D. Coarse root distribution of a semi-arid oak savanna estimated with ground penetrating radar. J. Geophys. Res. Biogeosci. 2014, 118, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Zhu, S.; Huang, C.; Su, Y.; Sato, M. 3D ground penetrating radar to detect tree roots and estimate root biomass in the field. Remote Sens. 2014, 6, 5754–5773. [Google Scholar] [CrossRef] [Green Version]
- Ji, W.; Wang, L.; Shi, X.; Xu, M.; Hao, Q.; Zhang, G.; Meng, Q.; Hou, S. Coarse root distribution and its influencing factors of typical species in Lesser Xing’an Range based on tree radar unit. J. Beijing For. Univ. 2020, 42, 33–41. [Google Scholar] [CrossRef]
- Ow, L.F.; Sim, E.K. Detection of urban tree roots with the ground penetrating radar. Plant Biosyst. Int. J. Deal. All Asp. Plant Biol. 2012, 146, 288–297. [Google Scholar] [CrossRef]
- Dannoura, M.; Hirano, Y.; Igarashi, T.; Ishii, M.; Aono, K.; Yamase, K.; Kanazawa, Y. Detection of Cryptomeria japonica roots with ground penetrating radar. Plant Biosyst. 2008, 142, 375–380. [Google Scholar] [CrossRef]
- Hirano, Y.; Dannoura, M.; Aono, K.; Igarashi, T.; Ishii, M.; Yamase, K.; Makita, N.; Kanazawa, Y. Limiting factors in the detection of tree roots using ground-penetrating radar. Plant Soil 2009, 319, 15–24. [Google Scholar] [CrossRef]
- Yan, H.; Dong, X.; Feng, G.; Zhang, S.; Mucciardi, A. Coarse root spatial distribution determined using a ground-penetrating radar technique in a subtropical evergreen broad-leaved forest, China. Sci. China Life Sci. 2013, 56, 1038–1046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, H.; Dong, X.; Zhang, S. Coarse root biomass distribution characteristics in a Chinese subtropical evergreen broadleaved forest. Chin. Sci. Bull. 2014, 24, 2416–2425. [Google Scholar] [CrossRef]
- Gan, M.; Sun, T.; Kang, Y.; Liu, X.; Li, X. Tree radar unit (TRU) technology detection hollow trunk and thick root distribution on the ancient and famous trees of Platycladus orientalis in the tomb of yellow emperor. J. Northwest For. Univ. 2016, 31, 182–187. [Google Scholar] [CrossRef]
- Barton, C.V.M.; Montagu, K.D. Detection of tree roots and determination of root diameters by ground penetrating radar under optimal conditions. Tree Physiol. 2004, 24, 1323–1331. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zajicova, K.; Chuman, T. Application of ground penetrating radar methods in soil studies: A review. Geoderma 2019, 343, 116–129. [Google Scholar] [CrossRef]
- Conyers, L.B. Ground-Penetrating Radar for Archaeology; Altamira Press: Walnut Creek, CA, USA, 2004. [Google Scholar] [CrossRef]
- Hagrey, S.A.A. Geophysical imaging of root-zone, trunk, and moisture heterogeneity. J. Exp. Bot. 2007, 58, 839–854. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y. Linear Inverse Scattering Imaging Algorithms for Ground Penetrating Radar. Master’s Thesis, Xiamen University, Xiamen, China, 2008. [Google Scholar]
- Ouyang, W. The Modeling Research on GPR of Pavement Crack Disease. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2016. [Google Scholar]
- Bain, J.C.; Day, F.P.; Butnor, J.R. Experimental Evaluation of Several Key Factors Affecting Root Biomass Estimation by 1500 MHz Ground-Penetrating Radar. Remote Sens. 2017, 9, 1337. [Google Scholar] [CrossRef] [Green Version]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for ground penetrating radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Giannopoulos, A. Modelling ground penetrating radar by gprMax. Constr. Build. Mater. 2005, 19, 755–762. [Google Scholar] [CrossRef]
- Ozkap, K.; Peksen, E.; Kaplanvural, I.; Caka, D. 3D scanner technology implementation to numerical modeling of GPR. J. Appl. Geophys. 2020, 179, 104086. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. An advanced GPR modelling framework: The next generation of gprMax. In Proceedings of the International Workshop on Advanced Ground Penetrating Radar, Florence, Italy, 7–10 July 2015; pp. 1–4. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Zhao, S.; Al-Qadi, I.L. Real-Time Density and Thickness Estimation of Thin Asphalt Pavement Overlay During Compaction Using Ground Penetrating Radar Data. Surv. Geophys. 2019, 41, 431–445. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Gray, A.; Giannakis, I.; Patterson, A.; Wetter, L.; Hamrah, A. A CUDA-based GPU engine for gprMax: Open source FDTD electromagnetic simulation software. Comput. Phys. Commun. 2019, 237, 208–218. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, J.; Lu, Y. A study on root morphological character of shelter belt on the river embankment. J. Nanjing For. Univ. Nat. Sci. Ed. 1998, 03, 34–37. [Google Scholar] [CrossRef]
- Zhou, G.; Zhu, Q.; Ren, Z.; Huo, Y.; Ma, H.; Wang, L. Research on the distribution characteristics of coarse roots of Populus hopeiensis in the loess area of northern Shaanxi based on GPR. J. Soil Water Conserv. 2016, 30, 346–351. [Google Scholar] [CrossRef]
- Guo, L.; Chen, J.; Cui, X.; Fan, B.; Lin, H. Application of ground penetrating radar for coarse root detection and quantification: A review. Plant Soil 2012, 362, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z. Characteristics of the Geothermal Field and Formation of the Thermal Groundwater in the Xiaotangshan Area of Beijing. Master’s Thesis, China University of Geosciences, Beijing, China, 2007. [Google Scholar]
- Cui, J.; Mu, K.; Hu, L.; Zhang, F.; Xu, S. Studies on the effects of sod-production on soil quality in Beijing area. Pratacultural Sci. 2003, 6, 68–72. [Google Scholar]
- Bano, M. Modelling of GPR waves for lossy media obeying a complex power law of frequency for dielectric permittivity. Geophys. Prospect. 2004, 52, 11–26. [Google Scholar] [CrossRef] [Green Version]
- Paz, A.; Thorin, E.; Topp, C. Dielectric mixing models for water content determination in woody biomass. Wood Sci. Technol. 2011, 45, 249–259. [Google Scholar] [CrossRef]
- Cheng, H.; Jiang, X.; Sun, Y.; Wang, J. Color image segmentation: Advances and prospects. Pattern Recognit. 2001, 34, 2259–2281. [Google Scholar] [CrossRef]
- Liang, H.; Fan, G.; Li, Y.; Zhao, Y. Theoretical development of plant root diameter estimation based on gprMax data and neural network modelling. Forests 2021, 12, 615. [Google Scholar] [CrossRef]
- Aguiar, G.Z.; Lins, L.; Paulo, M.F.; Maciel, S.T.R.; Rocha, A.A. Dielectric permittivity effects in the detection of tree roots using ground-penetrating radar. J. Appl. Geophys. 2021, 193, 104435. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, X.; Xue, F.; Wen, J.; Han, H.; Huang, Y. Estimating the location and diameter of tree roots using ground penetrating radar. Trans. Chin. Soc. Agric. Eng. 2021, 37, 160–168. [Google Scholar] [CrossRef]
- Sun, D.; Jiang, F.; Wu, H.; Liu, S.; Luo, P.; Zhao, Z. Root Location and Root Diameter Estimation of Trees Based on Deep Learning and Ground-Penetrating Radar. Agronomy 2023, 13, 344. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Media | Number of Samples | Deep (cm) | Relative Permittivity | ||
|---|---|---|---|---|---|
| soil | 1 | 0–10 | 4.58 | ||
| 2 | 10–20 | 5.70 | |||
| 3 | 20–30 | 6.03 | |||
| root | Diameter (cm) | Water content | |||
| 1 | 2.37 | 65% | 0–10 | 5.38 | |
| 2 | 2.29 | 72% | 0–10 | 5.63 | |
| 3 | 3.08 | 101% | 10–20 | 13.59 | |
| 4 | 2.71 | 96% | 10–20 | 9.81 | |
| 5 | 3.34 | 91% | 10–20 | 9.83 | |
| 6 | 3.31 | 98% | 20–30 | 15.28 | |
| 7 | 3.23 | 107% | 20–30 | 13.62 | |
| 8 | 2.20 | 103% | 20–30 | 14.96 |
| Media | Number of Samples | Diameter (cm) | Residuals (cm) | Residual Percentage | |
|---|---|---|---|---|---|
| Actual Value | Estimated Value | ||||
| root | 1 | 2.37 | 2.96 | 0.59 | 24.89% |
| 2 | 2.29 | 1.88 | 0.41 | 17.90% | |
| 3 | 3.08 | 2.76 | 0.32 | 10.39% | |
| 4 | 2.71 | 2.03 | 0.68 | 25.09% | |
| 5 | 3.34 | 3.75 | 0.41 | 12.28% | |
| 6 | 3.31 | 3.01 | 0.30 | 9.06% | |
| 7 | 3.23 | 3.64 | 0.41 | 12.69% | |
| 8 | 2.20 | 1.83 | 0.37 | 16.82% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bi, L.; Xing, L.; Liang, H.; Lin, J. Estimation of Coarse Root System Diameter Based on Ground-Penetrating Radar Forward Modeling. Forests 2023, 14, 1370. https://doi.org/10.3390/f14071370
Bi L, Xing L, Liang H, Lin J. Estimation of Coarse Root System Diameter Based on Ground-Penetrating Radar Forward Modeling. Forests. 2023; 14(7):1370. https://doi.org/10.3390/f14071370
Chicago/Turabian StyleBi, Linyue, Linyin Xing, Hao Liang, and Jianhui Lin. 2023. "Estimation of Coarse Root System Diameter Based on Ground-Penetrating Radar Forward Modeling" Forests 14, no. 7: 1370. https://doi.org/10.3390/f14071370