
Research on Non-Destructive Testing of Log Knot Resistance Based on Improved Inverse-Distance-Weighted Interpolation Algorithm
Abstract
:1. Introduction
2. Materials and Methods
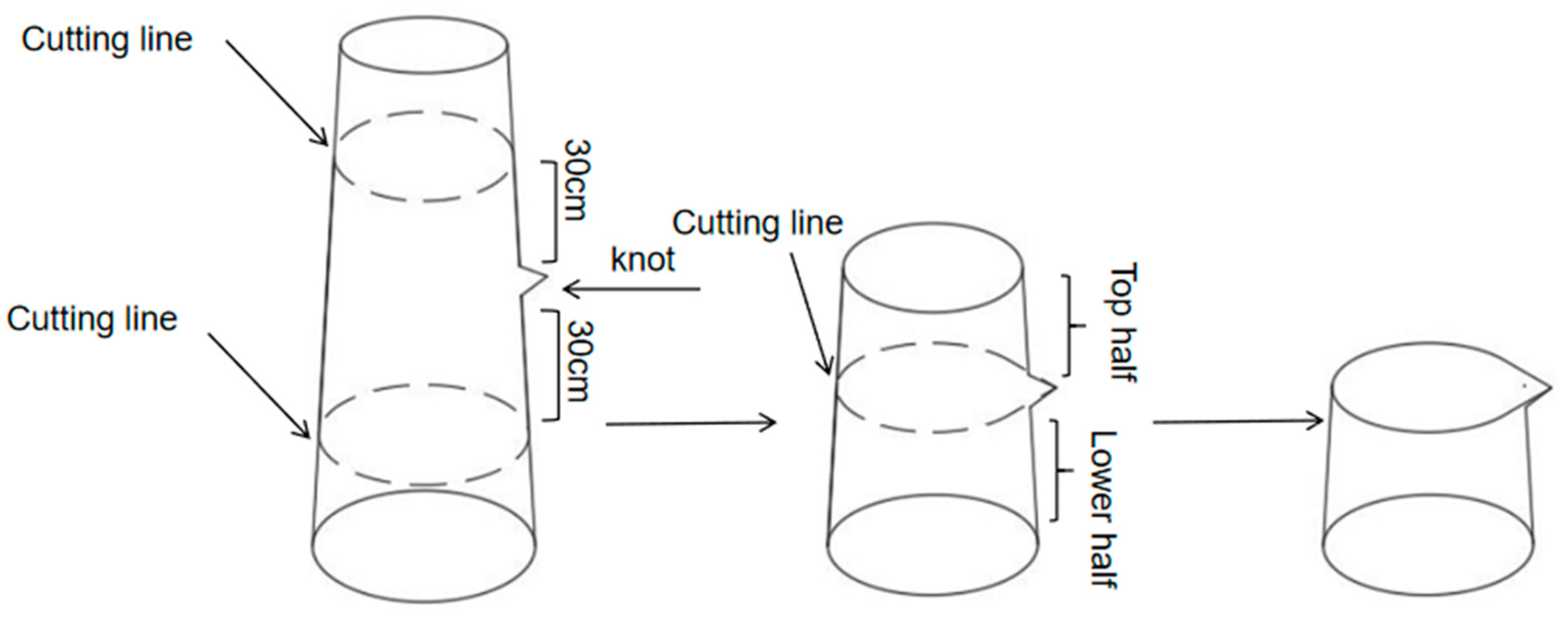
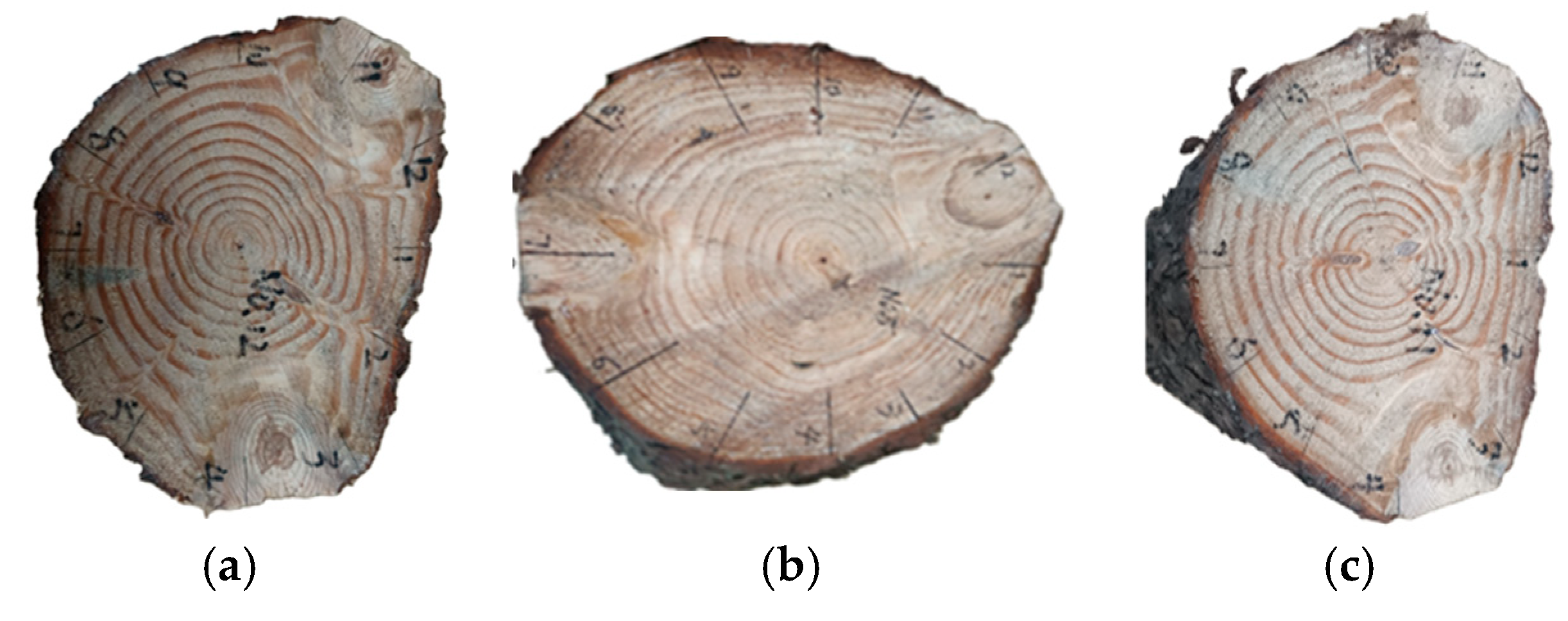
2.1. Test Material
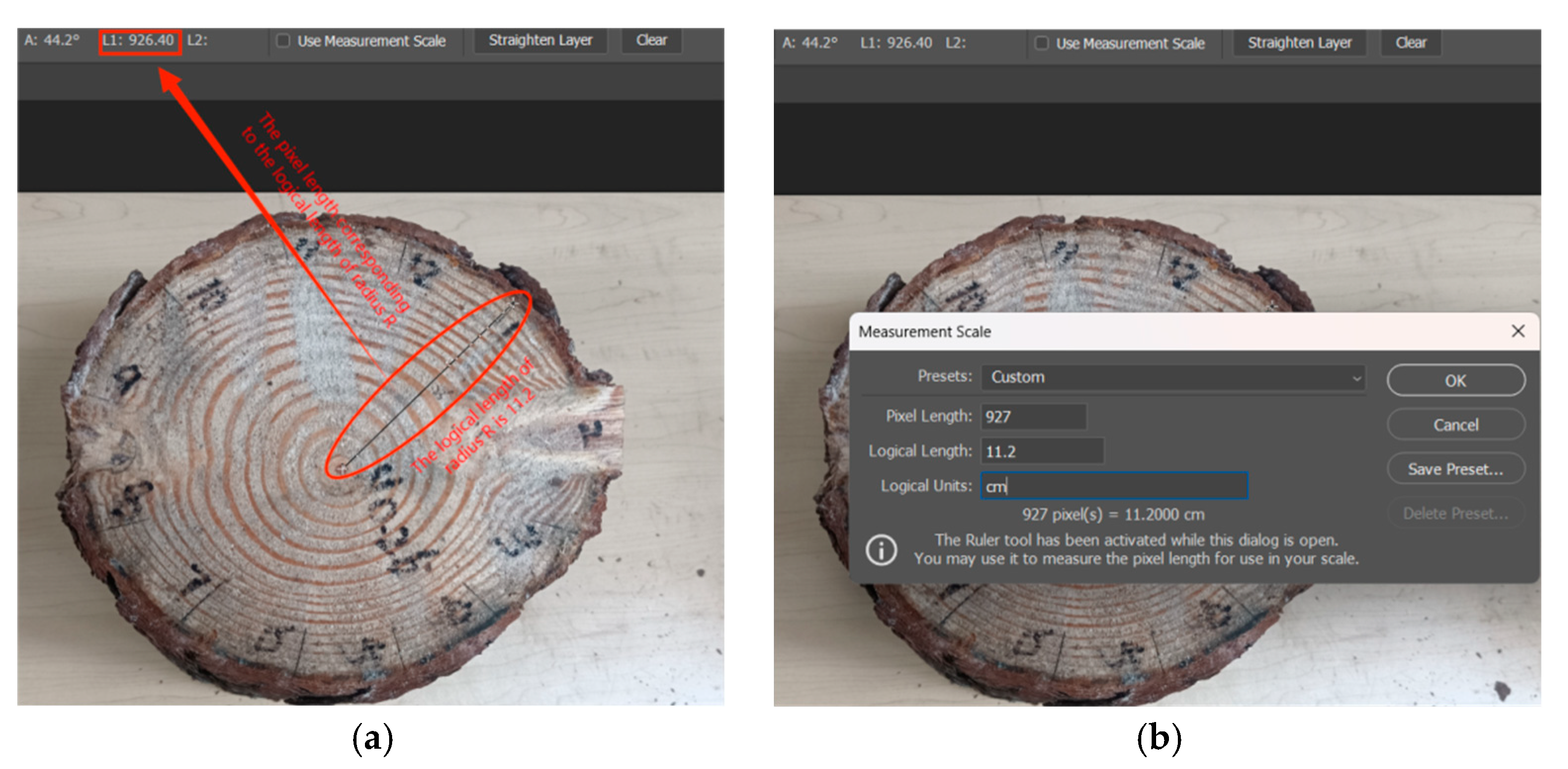
2.2. Test Equipment
2.3. Test Methods
3. Improved Inverse-Distance-Weighted Interpolation Algorithm
3.1. Inverse-Distance-Weighted Interpolation Algorithm
3.2. Inverse-Distance-Weighted Interpolation Algorithm Based on Eccentric Circle Search Method
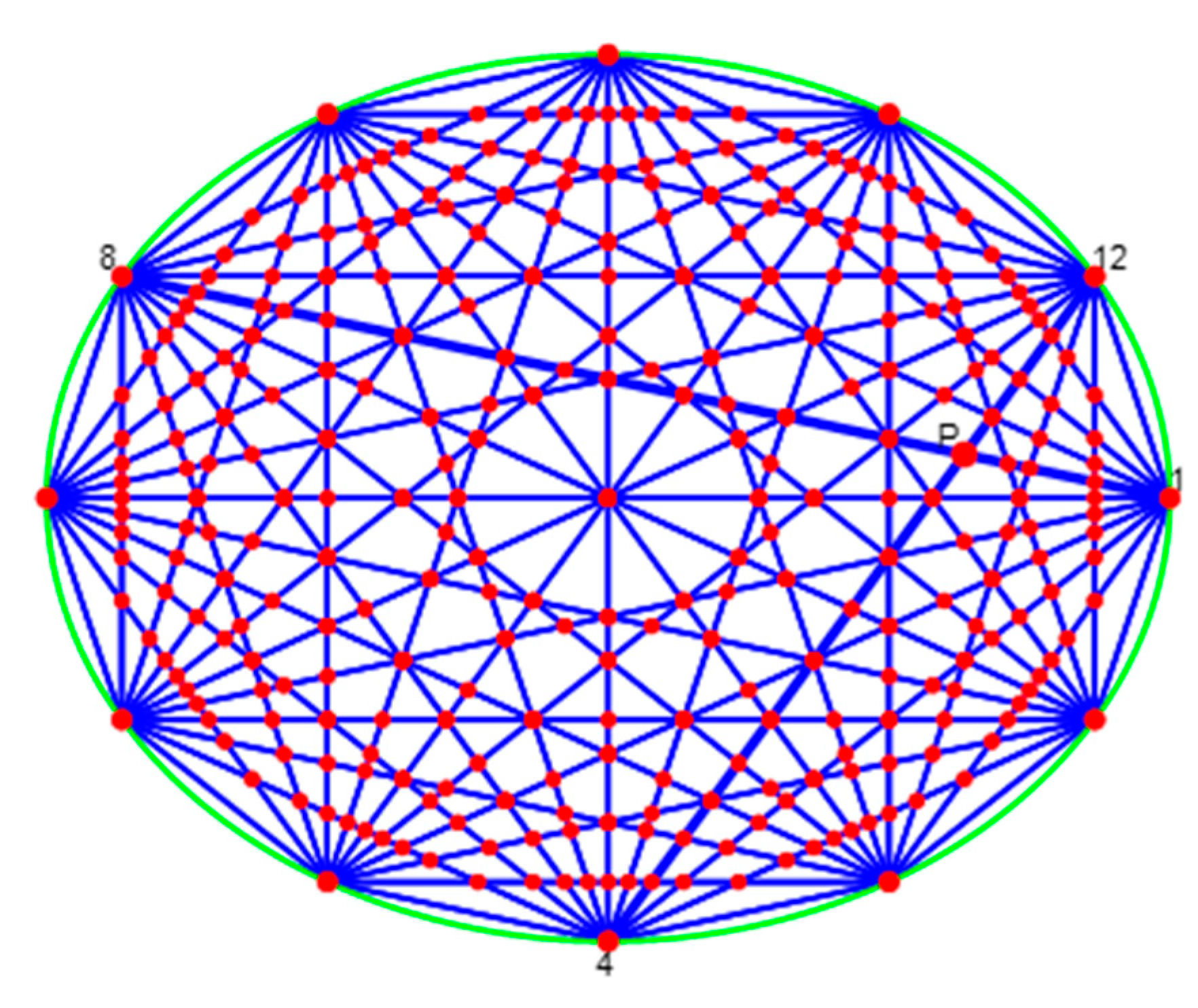
3.2.1. Azimuth Search Method
3.2.2. Eccentric Circle Search Method
3.3. ECIDW Algorithm Imaging Steps
4. Results and Analyses
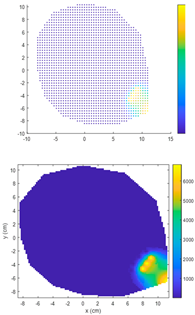
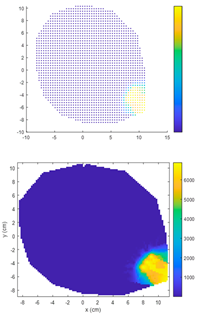
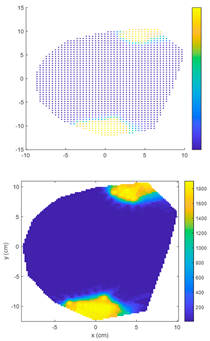
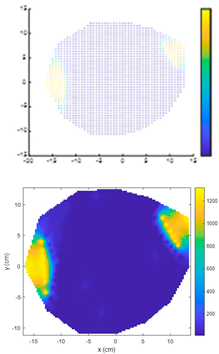
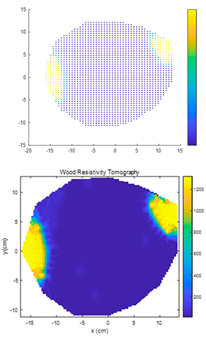
4.1. Comparison of Electrical Resistance Tomography Results Between IDW Algorithm and ECIDW Algorithm
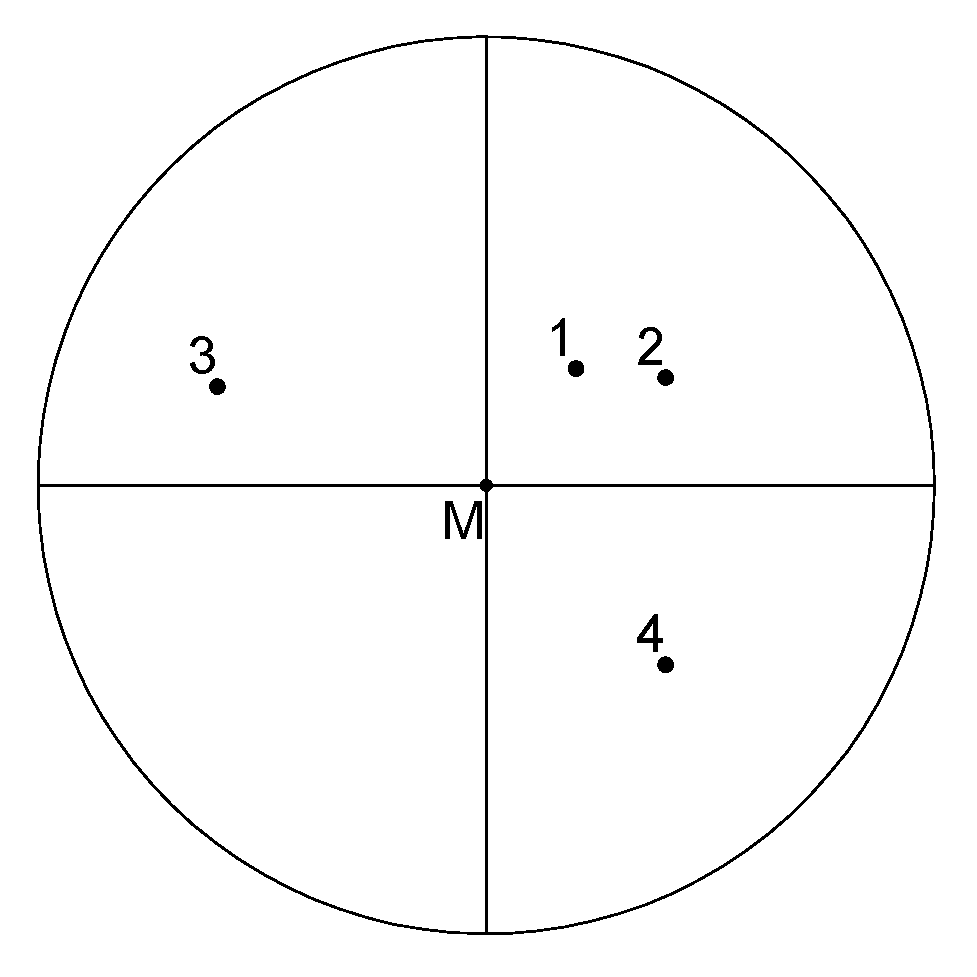
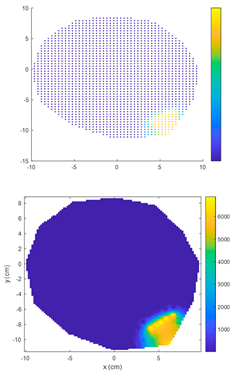
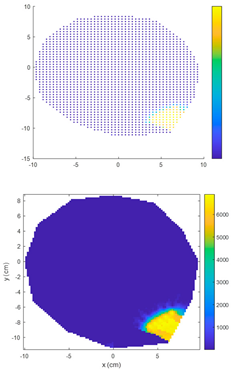
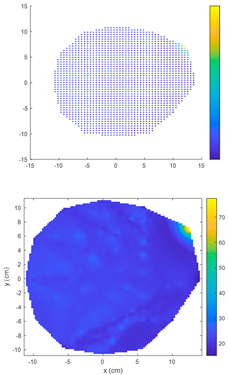
4.1.1. Single-Knot Specimen Logs
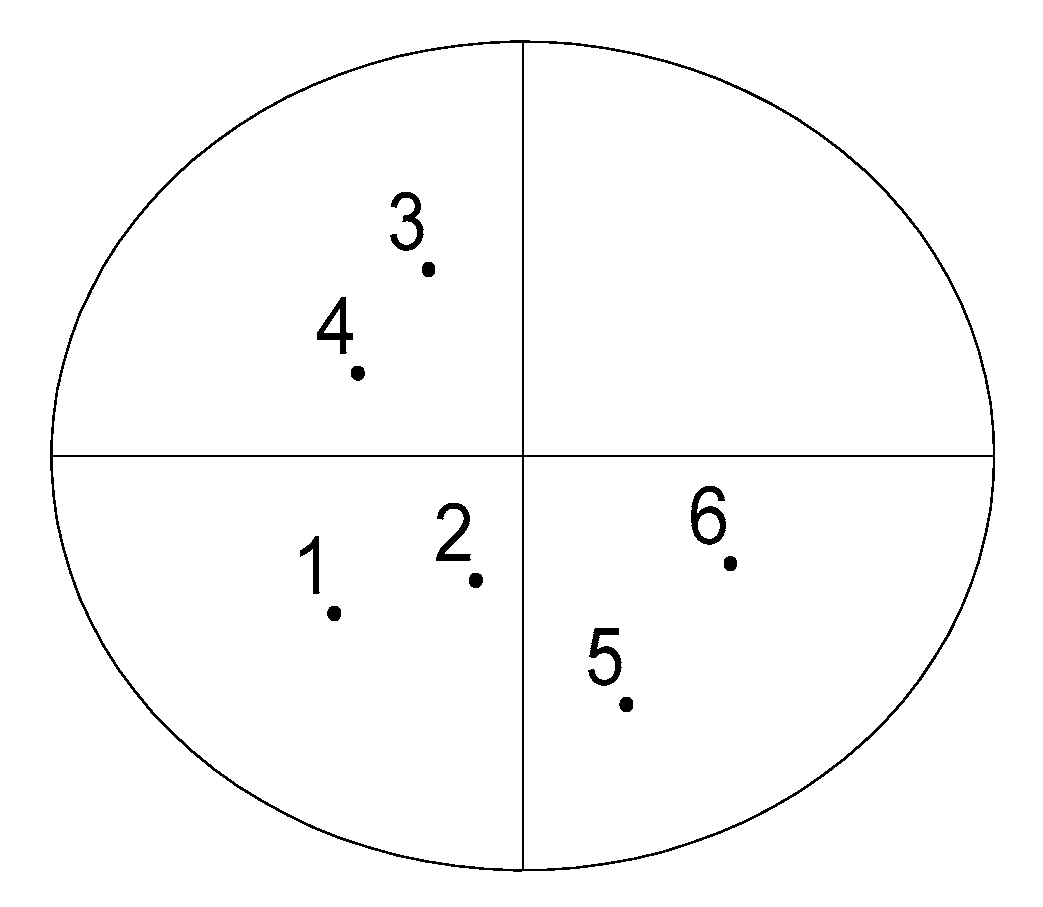
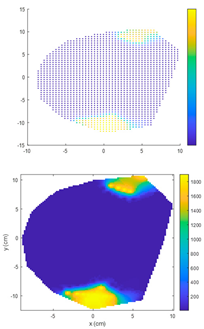
4.1.2. Double-Knot Specimen Logs
4.2. Analysis of the Results of the Prediction of the Size of the Knot Area of the Specimen Logs
5. Conclusions
- (1)
- For the sample logs, both the conventional IDW algorithm and the improved ECIDW algorithm can accurately predict the location of the knots, but the shape of the knots cannot be accurately predicted by both of them. At the same time, there is a difference between the knot shapes obtained by the algorithms and the actual knot shapes.
- (2)
- The relative error for the knot area measured by the IDW algorithm ranges from 18.97% to 88.34%. In comparison, the relative error for the knot area measured by the ECIDW algorithm varies from 1.82% to 74.16%. Overall, for the specimen logs, the relative errors of the knot areas calculated using the ECIDW algorithm are consistently smaller than those obtained using the IDW algorithm. This indicates that the knot tomography imaging accuracy of the ECIDW algorithm is superior to that of the IDW algorithm.
- (3)
- Using the IDW algorithm to predict the knot area of specimen logs yields an average prediction accuracy of only 51.58%. In contrast, the ECIDW algorithm proposed in this paper achieves an average detection accuracy of 72.90%. This demonstrates that the improved ECIDW algorithm provides a significantly higher accuracy in predicting the knot area compared to that of the conventional IDW algorithm.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zheng, Q.; Zhao, W.; Xu, F.; Liu, Y. Stress wave wood defect tomography based on asymmetric ellipse. J. For. Eng. 2023, 8, 137–143. [Google Scholar]
- Wang, Z.; Fang, Y.; Feng, H.; Du, X.; Xia, K. Methods for detecting and locating knot defects in wood. Prog. Laser Optoelectron. 2018, 55, 317–324. [Google Scholar]
- Huang, S.; Wang, J.; Lu, J.; Lei, Y. Research progress of world knot. For. Prod. Ind. 2011, 38, 3–7. [Google Scholar]
- Oja, J. Evaluation of knot parameters measured automatically in CT-images of Norway spruce (Picea abies (L) Karst). Holzals Roh Und Werkst. 2000, 58, 375–379. [Google Scholar] [CrossRef]
- Nordmark, U. Models of knots and log geometry of young Pinus sylvestris sawlogs extracted from computed tomographic images. Scand. J. For. Res. 2003, 18, 168–175. [Google Scholar] [CrossRef]
- Thomas, R.E. Predicting intemal Yellow-poplar log defect features using surface indicators. Wood Fiber Sci. 2008, 40, 14–22. [Google Scholar]
- Dong, F.; Cui, X. Development of resistance tomography. Chin. J. Sci. Instrum. 2003, 35, 703–705. [Google Scholar]
- Bao, Z.; Wang, L. Research progress on the application of resistance test method in wood decay detection. For. Eng. 2013, 29, 47–51. [Google Scholar]
- Just, A.; Jacbbs, F. Elektrische Widerstandstomographie zur Umersuchung des Gesundheitszustandes von Baumen. Hochaufl6sende Geoelektrik Leipz. Inst. Flit Geophys. Geol. 1998, 1, 2–3. [Google Scholar]
- Weihs, U.; Dubbel, V.; Knunmheuer, F.; Just, A. The electrical resistivity tomography—A promising technique for the detection of colored heart wood on standing beech trees. Forst Holz 1999, 54, 166–170. [Google Scholar]
- Lin, C.J.; Chung, C.H.; Yang, T.H.; Lin, F.C. Detection of electric resistivity tomography and evaluation of the sapwood-heartwood demarcation in three Asia Gymnosperm species. Vestn. Khirurgii Im. I.I.Grek. 2012, 46, 33–37. [Google Scholar] [CrossRef]
- Bicker, D.; Rust, S. Electric resistivity tomography shows radial variation of electrolytes in Quercus robur. Can. J. For. Res. 2010, 40, 1189–1193. [Google Scholar] [CrossRef]
- Adrien, G.; Ostergaard, K.T.; Mothei, L.; Fan, J.; Lockington, D.A. Using electrical resistivity tomography to differentiate sapwood from heartwood: Application to conifers. Tree Physiol. 2013, 45, 187–194. [Google Scholar]
- Yue, X.; Wang, L.; Wang, X.; Rong, B.; Ge, X.; Liu, Z.; Chen, Q. Quantitative detection of decay degree of living wood by three nondestructive testing methods: Resistance tomography and Stress sweep and impedance meter. Chin. J. For. 2017, 53, 138–146. [Google Scholar]
- Shi, X.; Wang, L.; Xu, H.; Xu, Q.; Cao, S.; Xu, M. Quantitative detection of internal decay of red pine based on impedance meter and ERT technology. J. Beijing For. Univ. 2017, 39, 102–111. [Google Scholar]
- Liu, G.; Wu, Y.; Yang, J.; Yu, S. Three-dimensional spatial variation of regional soil salinity based on spectral index. Spectrosc. Spectr. Anal. 2013, 33, 2758–2761. [Google Scholar]
- Wang, Y.; Ding, Y.J.; Ye, B.S.; Liu, F.; Wang, J.; Wang, J. Contributions of climate and human activities to changes in runoff of the Yellow and Yangtze rivers from 1950 to 2008. Sci. China Earth Sci. 2013, 56, 1398–1412. [Google Scholar] [CrossRef]
- Chen, D.; Zou, C.; Wang, S.; Li, H.; Zhang, X. Study on spatial interpolation of the average temperature in the Yili River Valley based on DEM. Spectrosc. Spectr. Anal. 2011, 31, 1925–1929. [Google Scholar]
- Chen, F.; Feng, H.; Du, X.; Fang, Y.; Weng, X. Three-dimensional stress wave imaging method of wood internal defects based on TIDW. Chin. J. Sens. Technol. 2015, 28, 1625–1633. [Google Scholar]
- Duan, Z.-G.; Xiao, H.-S.; Yuan, W.-X. Interpolation method of forest canopy height model based on discrete point cloud data. Sci. Silvae Sin. 2016, 52, 86–94. [Google Scholar]
- Fan, Y.; Yu, X.; Zhang, H.; Song, M. Comparative analysis of Kriging and IDW interpolation of rainfall data: A case study of Lijiang River Basin. J. Hydrol. 2014, 34, 61–66. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specimen Log Number/No. | Specimen Log Species | Specimen Log Radius/cm | Cross-Sectional Area of Specimen Logs/cm2 | Specimen Log Knotty Area/cm2 |
|---|---|---|---|---|
| 1 | pine | 10.2 | 432.24 | 18.14 |
| 2 | pine | 10.3 | 419.35 | 26.49 |
| 3 | fir | 11.8 | 440.42 | 7.12 |
| 4 | pine | 10.2 | 396.73 | 34.80 |
| 5 | pine | 12.9 | 613.69 | 55.59 |
| 6 | pine | 10.4 | 312.57 | 29.24 |
| Specimen Log Number | IDW Algorithm | ECIDW Algorithm |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
| Specimen Log Number | IDW Algorithm | ECIDW Algorithm |
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
| Specimen Log Number/No. | Measured Nodule Area | The IDW Algorithm Is Calculated to Obtain the Nodal Area | The ECIDW Algorithm Is Calculated to Obtain the Nodal Area | Relative Error of IDW Algorithm | Relative Error of ECIDW Algorithm |
|---|---|---|---|---|---|
| 1 | 18.14 | 6.10 | 15.99 | 66.37 | 11.85 |
| 2 | 26.49 | 17.99 | 21.34 | 32.09 | 19.44 |
| 3 | 7.12 | 0.83 | 1.84 | 88.34 | 74.16 |
| 4 | 34.80 | 28.20 | 33.99 | 18.97 | 2.33 |
| 5 | 55.59 | 43.08 | 54.58 | 22.50 | 1.82 |
| 6 | 29.24 | 10.91 | 13.73 | 62.27 | 53.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Chen, W.; Wang, Q.; Xiao, J. Research on Non-Destructive Testing of Log Knot Resistance Based on Improved Inverse-Distance-Weighted Interpolation Algorithm. Forests 2024, 15, 1858. https://doi.org/10.3390/f15111858
Liu F, Chen W, Wang Q, Xiao J. Research on Non-Destructive Testing of Log Knot Resistance Based on Improved Inverse-Distance-Weighted Interpolation Algorithm. Forests. 2024; 15(11):1858. https://doi.org/10.3390/f15111858
Chicago/Turabian StyleLiu, Fenglu, Wenhao Chen, Qinhui Wang, and Jiawei Xiao. 2024. "Research on Non-Destructive Testing of Log Knot Resistance Based on Improved Inverse-Distance-Weighted Interpolation Algorithm" Forests 15, no. 11: 1858. https://doi.org/10.3390/f15111858
APA StyleLiu, F., Chen, W., Wang, Q., & Xiao, J. (2024). Research on Non-Destructive Testing of Log Knot Resistance Based on Improved Inverse-Distance-Weighted Interpolation Algorithm. Forests, 15(11), 1858. https://doi.org/10.3390/f15111858