
Detection of Pine-Wilt-Disease-Affected Trees Based on Improved YOLO v7

 ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Data Collection
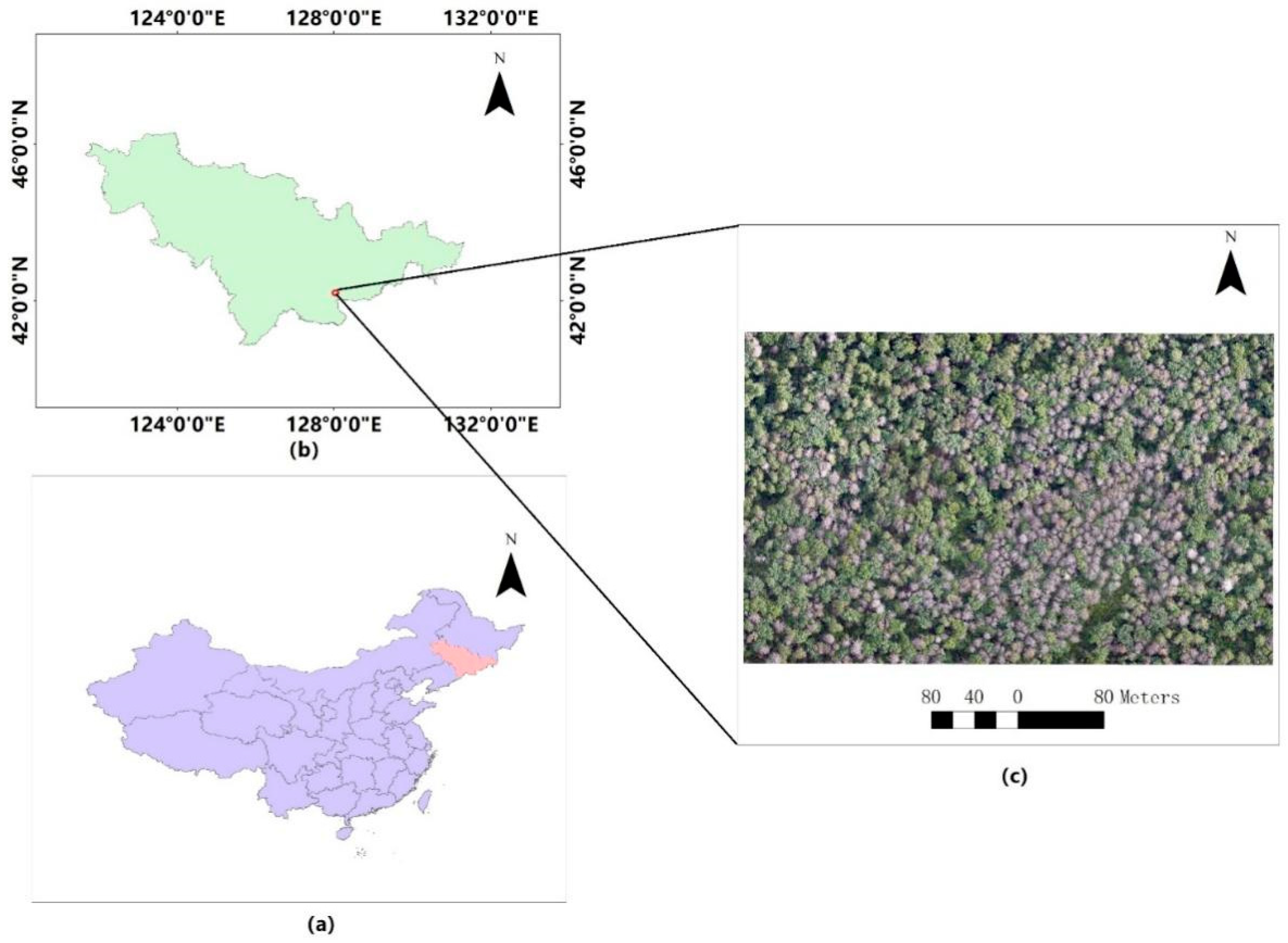
2.1.1. Overview of the Study Area
2.1.2. Data Acquisition
2.1.3. Dataset Production
2.2. Methods
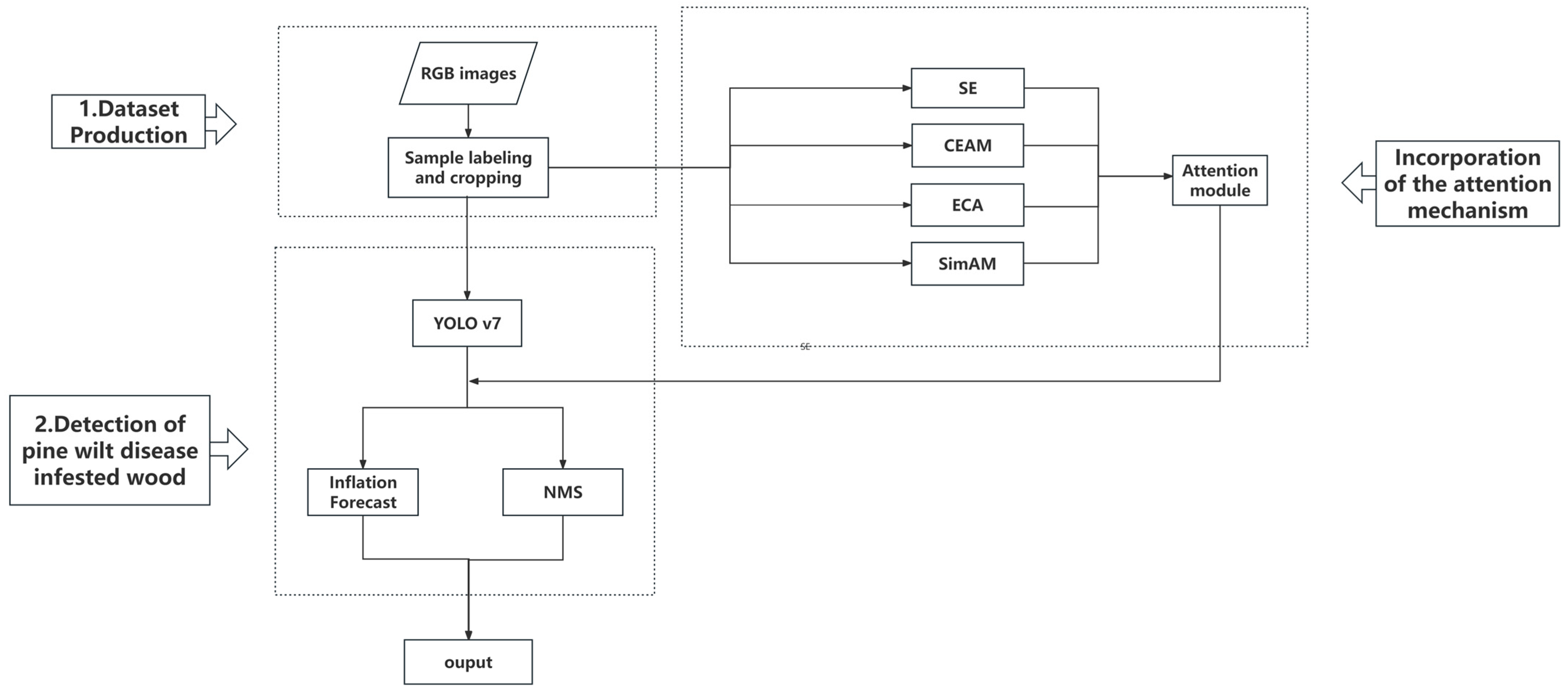
2.2.1. Experiment Content
2.2.2. Target Detection Model
Introduction to YOLO v7
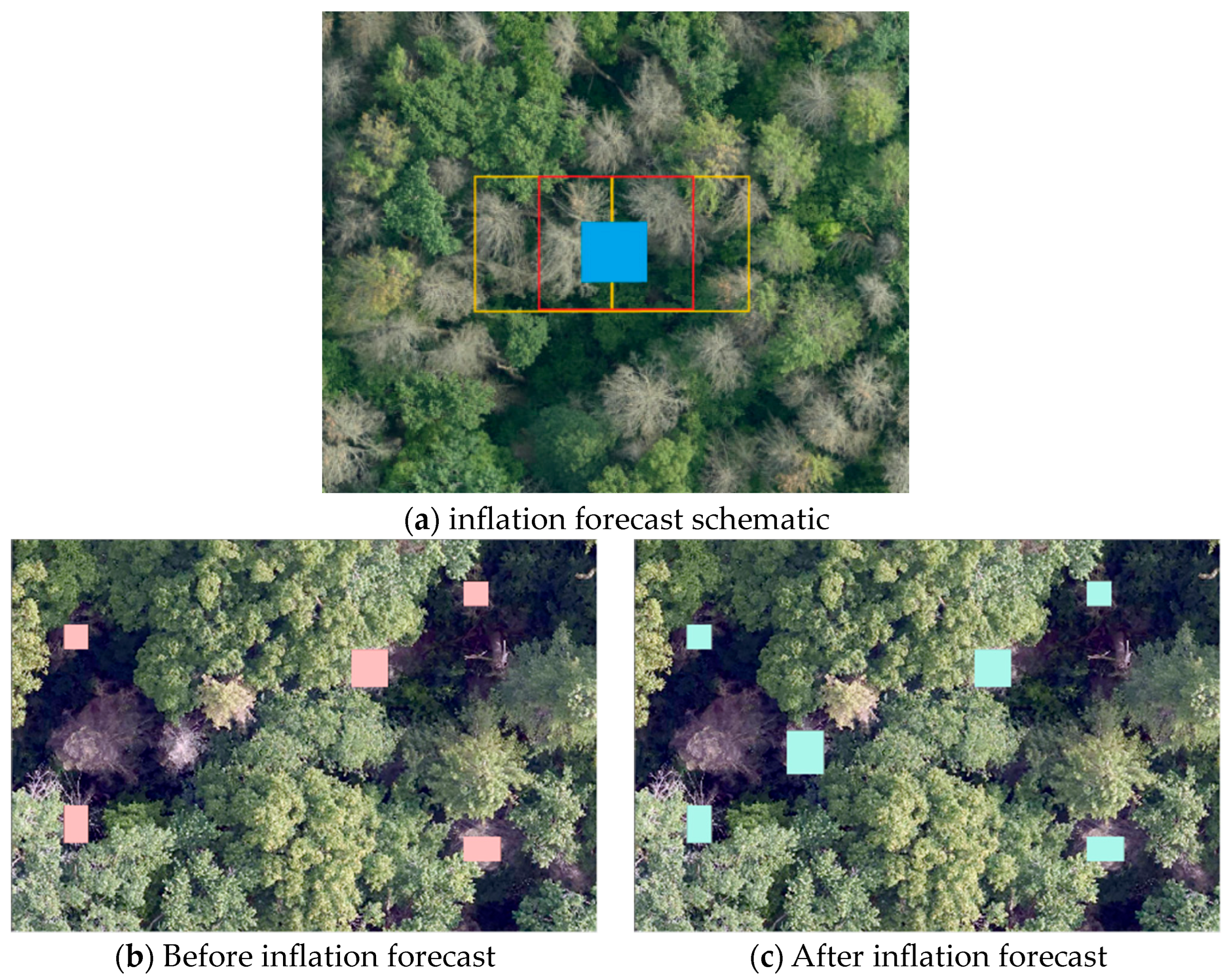
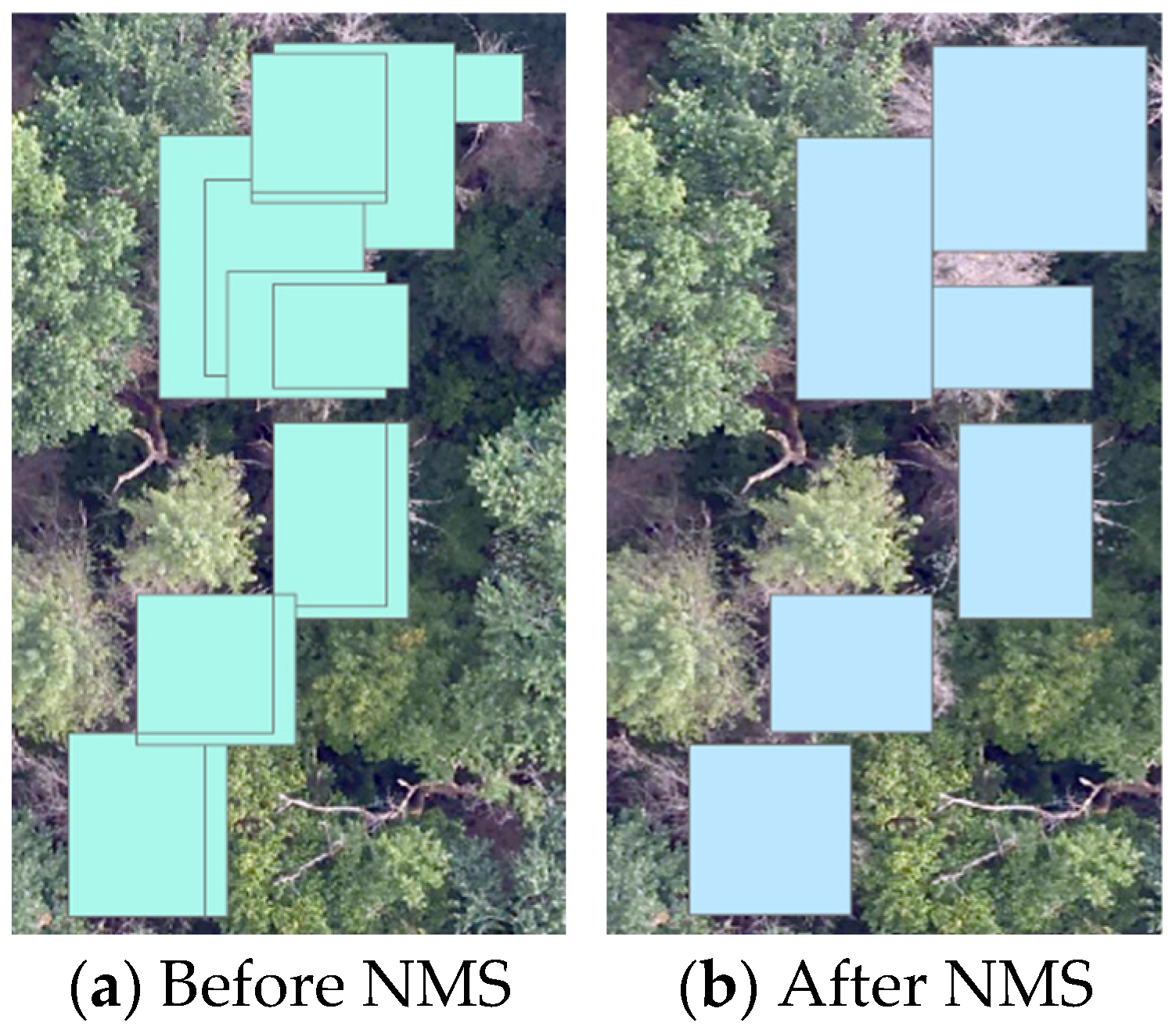
Target Detection Optimization Strategy
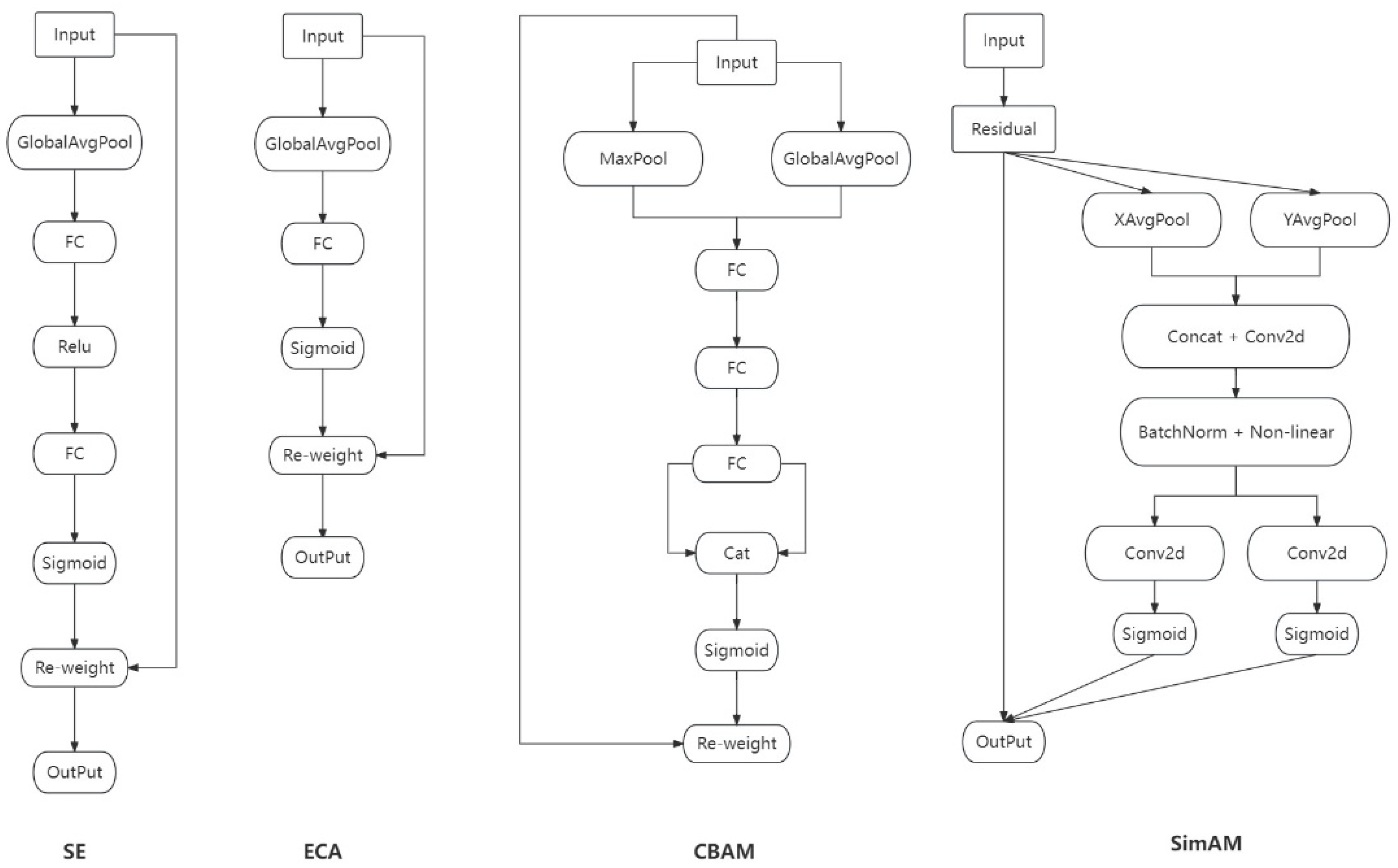
2.2.3. Introduction to the Attention Mechanisms Module
2.2.4. Test Environment and Parameter Settings
2.2.5. Accuracy Inspection
3. Results
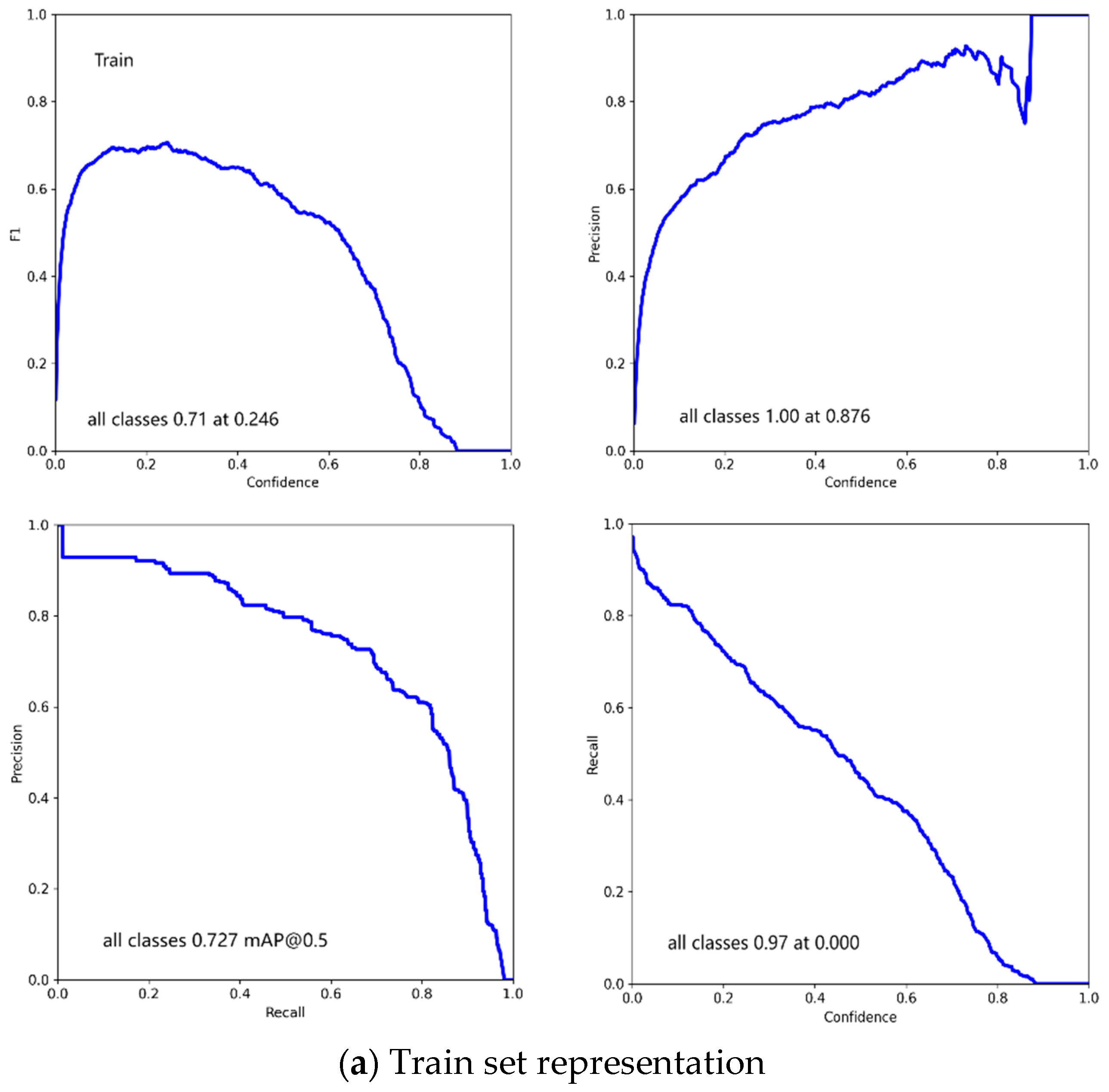
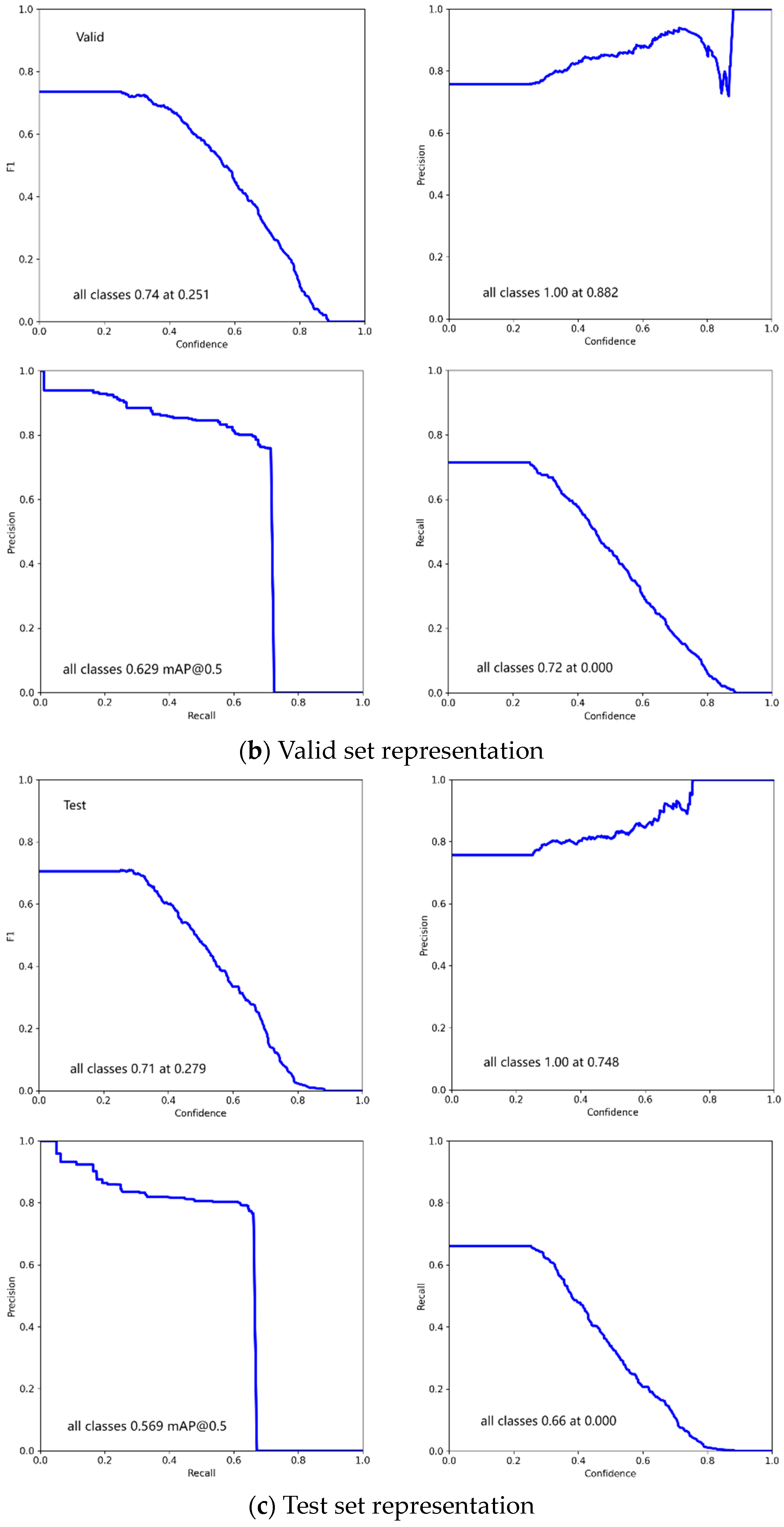
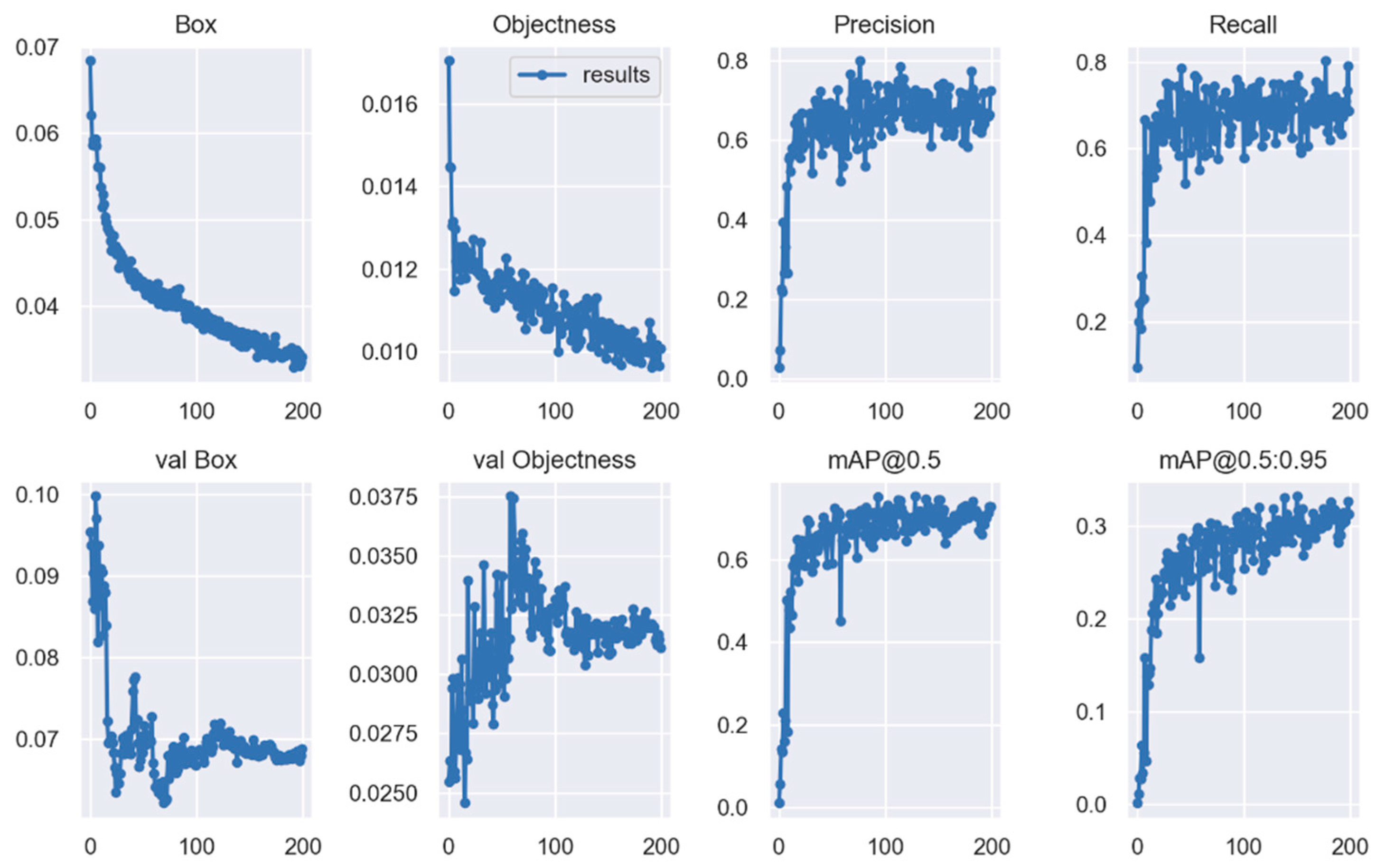
3.1. Target Detection Model Performance Analysis
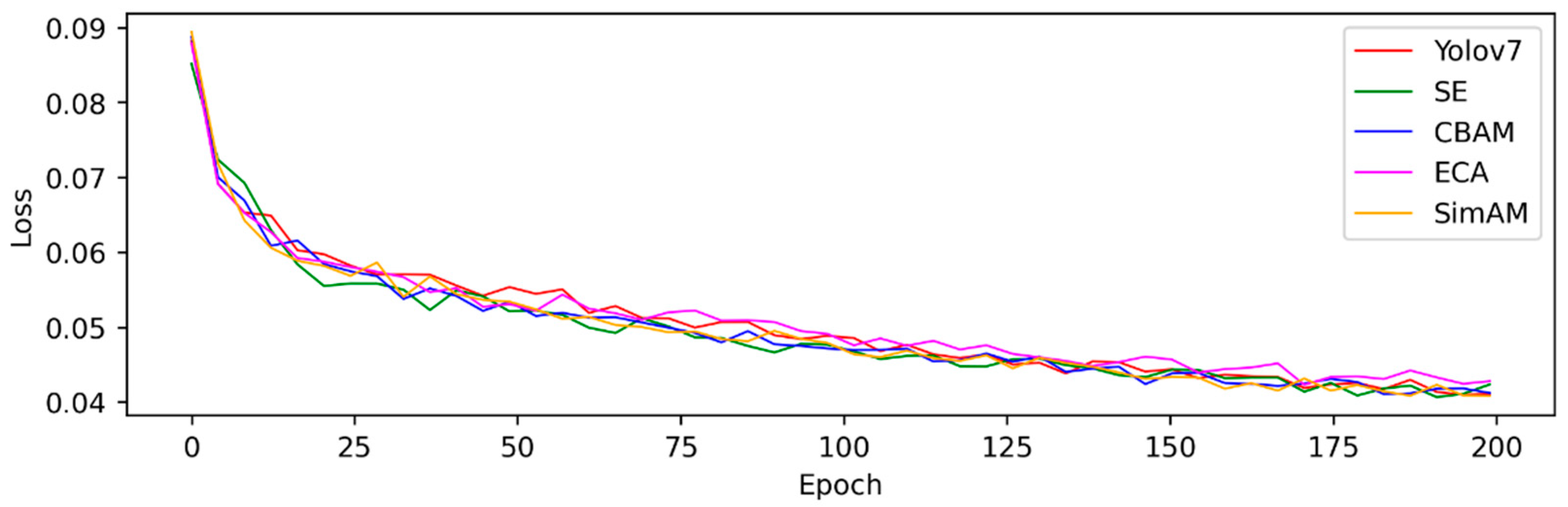
3.2. Comparative Analysis of Training Accuracy of Target Detection Model
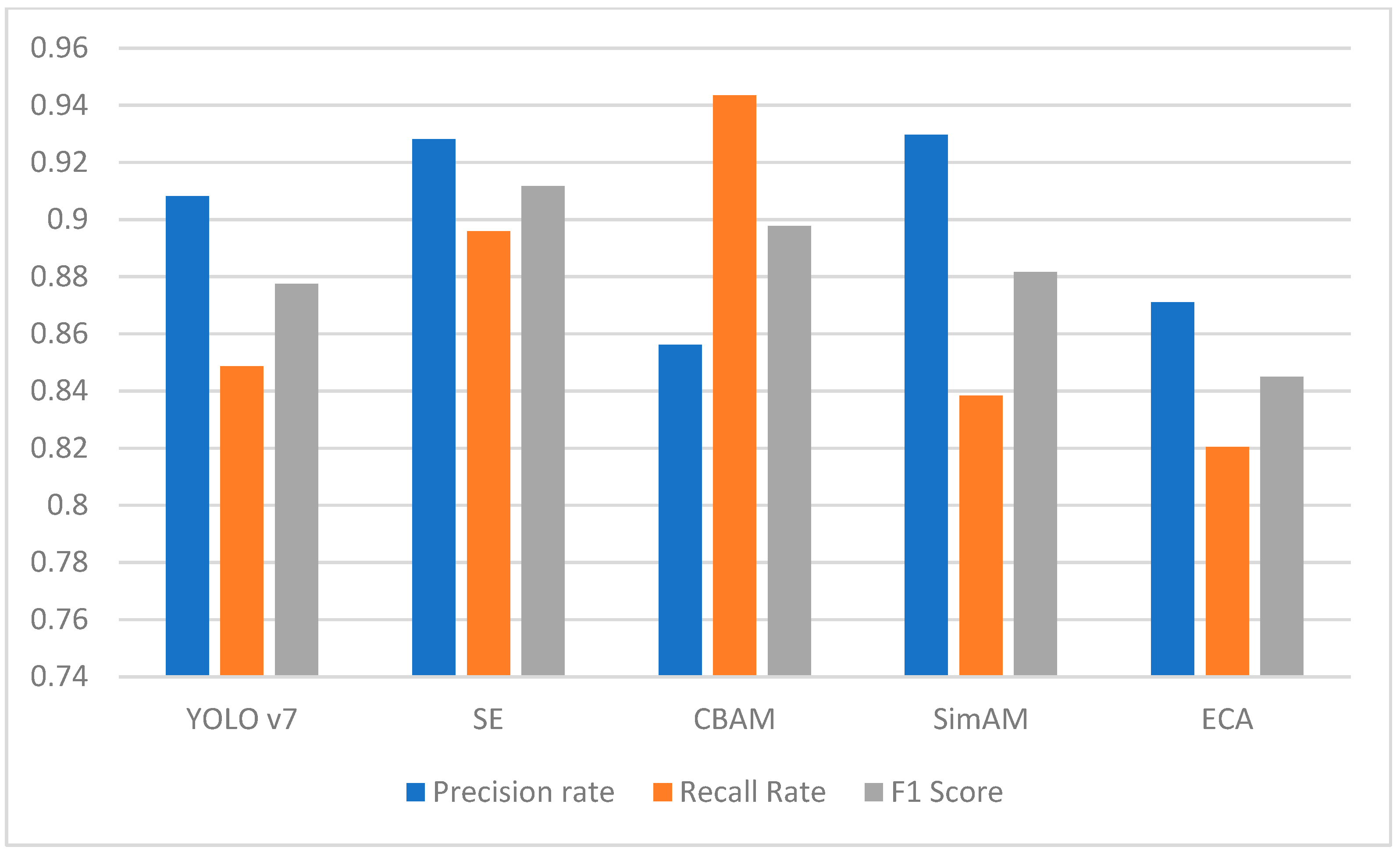
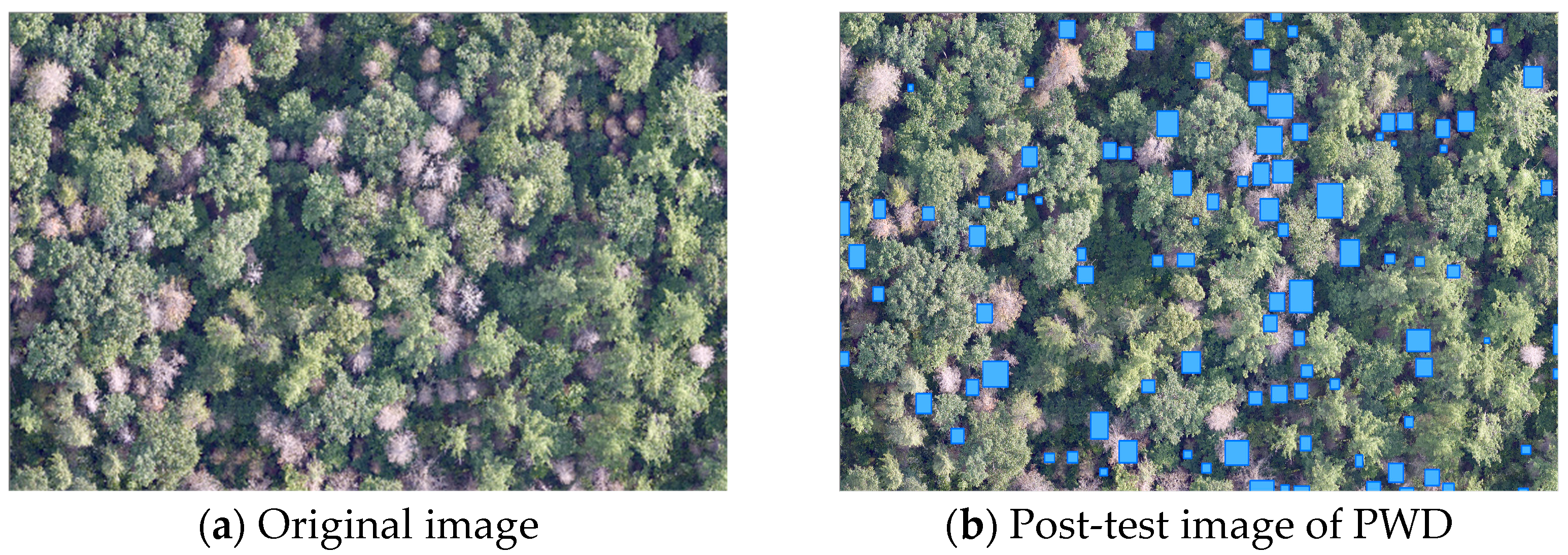
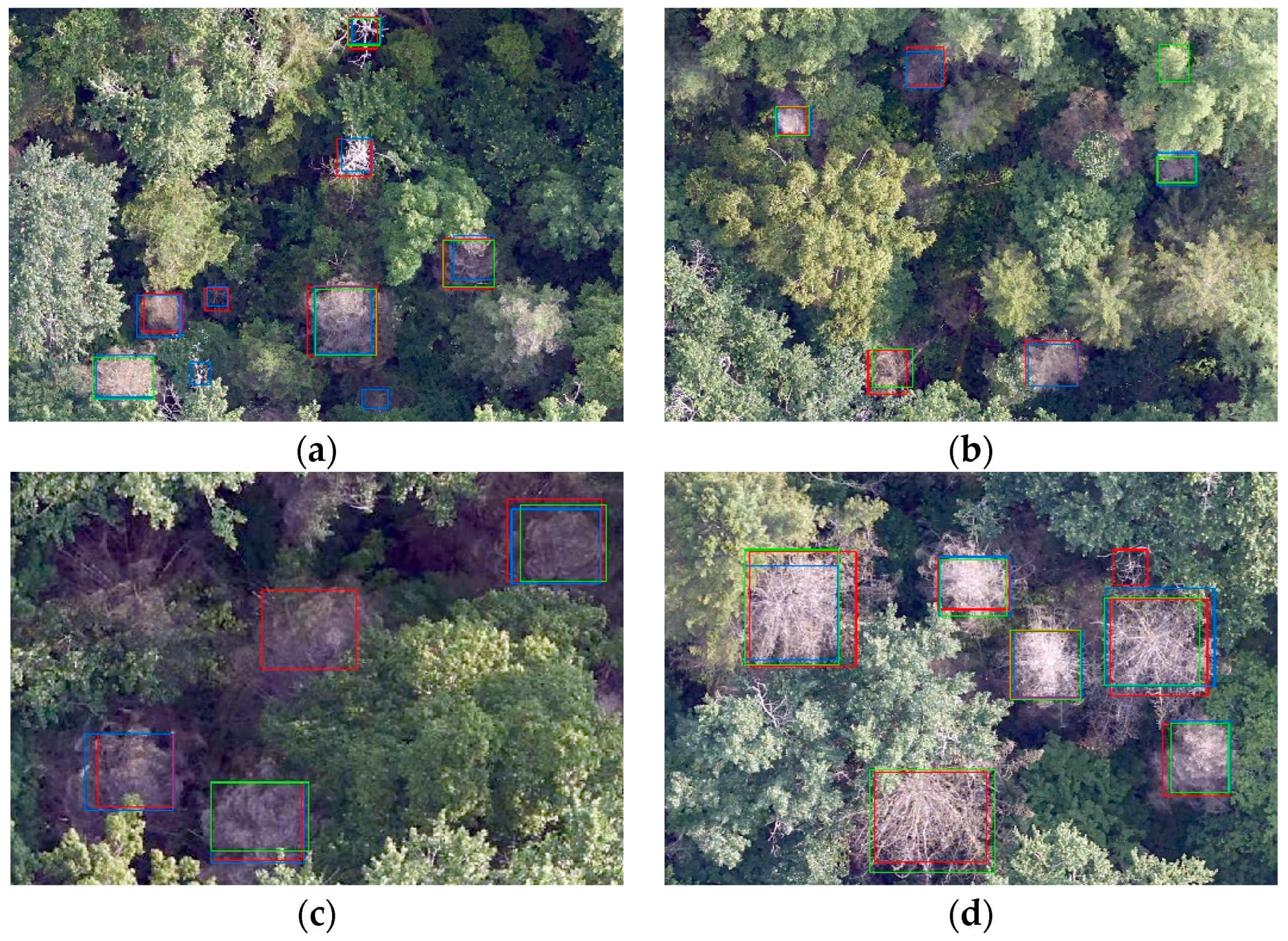
3.3. Target Detection Model Performance Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Proença, D.N.; Grass, G.; Morais, P.V. Understanding Pine Wilt Disease: Roles of the Pine Endophytic Bacteria and of the Bacteria Carried by the Disease-causing Pine wood Nematode. MicrobiologyOpen 2017, 6, e00415. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, H.; Ding, X.; Wang, L.; Wang, X.; Chen, F.J.I.J.o.M.S. The detection of pine wilt disease: A literature review. Int. J. Mol. Sci. 2022, 23, 10797. [Google Scholar] [CrossRef] [PubMed]
- Mota, M.; Ribeiro, B.; Carrasquinho, I.; Ribeiro, P.; Evaristo, I.; Costa, R.; Vieira, P.; Vasconcelos, M. Pine Wilt Disease and the Pine Wood Nematode: A Threat to Mediterranean Pine Forests; Universidade de Évora: Évora, Portugal, 2011. [Google Scholar]
- Iordache, M.-D.; Mantas, V.; Baltazar, E.; Lewyckyj, N.; Souverijns, N. Application of Random Forest Classification to Detect the Pine Wilt Disease from High Resolution Spectral Images. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4489–4492. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, Y.; Pan, L.; Xie, Y.; Zhang, B.; Liang, R.; Sun, Y. Pine wilt disease detection in high-resolution UAV images using object-oriented classification. J. For. Res. 2022, 33, 1377–1389. [Google Scholar] [CrossRef]
- Syifa, M.; Park, S.J.; Lee, C.W. Detection of the pine wilt disease tree candidates for drone remote sensing using artificial intelligence techniques. Engineering 2020, 6, 919–926. [Google Scholar] [CrossRef]
- Yu, B.; Liu, Y.; Zhao, T. Counting of pine trees nematode disease trees based on threshold segmentation. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2021; Volume 1961, No. 1. [Google Scholar]
- Lee, S.; Park, S.J.; Baek, G.; Kim, H.; Lee, C.W. Detection of damaged pine tree by the pine wilt disease using UAV Image. Korean J. Remote Sens. 2019, 35, 359–373. [Google Scholar]
- Zhang, Y.; Dian, Y.; Zhou, J.; Peng, S.; Hu, Y.; Hu, L.; Han, Z.; Fang, X.; Cui, H. Characterizing spatial patterns of pine trees nematode outbreaks in subtropical zone in China. Remote Sens. 2021, 13, 4682. [Google Scholar] [CrossRef]
- Hu, W.; Huang, Y.; Wei, L.; Zhang, F.; Li, H. Deep Convolutional Neural Networks for Hyperspectral Image Classification. J. Sens. 2015, 2015, 258619. [Google Scholar] [CrossRef]
- Han, Z.; Hu, W.; Peng, S.; Lin, H.; Zhang, J.; Zhou, J.; Wang, P.; Dian, Y. Detection of Standing Dead Trees after Pine Wilt Disease Outbreak with Airborne Remote Sensing Imagery by Multi-Scale Spatial Attention Deep Learning and Gaussian Kernel Approach. Remote Sens. 2022, 14, 3075. [Google Scholar] [CrossRef]
- Park, H.G.; Yun, J.P.; Kim, M.Y.; Jeong, S.H. Multichannel Object Detection for Detecting Suspected Trees with Pine Wilt Disease Using Multispectral Drone Imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 8350–8358. [Google Scholar] [CrossRef]
- Qin, J.; Wang, B.; Wu, Y.; Lu, Q.; Zhu, H. Identifying Pine Trees Nematode Disease Using UAV Images and Deep Learning Algorithms. Remote Sens. 2021, 13, 162. [Google Scholar] [CrossRef]
- Hu, X.; Ban, Y.; Nascetti, A. Uni-Temporal Multispectral Imagery for Burned Area Mapping with Deep Learning. Remote Sens. 2021, 13, 1509. [Google Scholar] [CrossRef]
- Deng, X.; Tong, Z.; Lan, Y.; Huang, Z. Detection and Location of Dead Trees with Pine Wilt Disease Based on Deep Learning and UAV Remote Sensing. AgriEngineering 2020, 2, 294–307. [Google Scholar] [CrossRef]
- Sun, Z.; Ibrayim, M.; Hamdulla, A. Detection of Pine Wilt Nematode from Drone Images Using UAV. Sensors 2022, 22, 4704. [Google Scholar] [CrossRef] [PubMed]
- Fukui, H.; Hirakawa, T.; Yamashita, T.; Fujiyoshi, H. Attention Branch Network: Learning of Attention Mechanism for Visual Explanation. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 10–15 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 10697–10706. [Google Scholar]
- Zhu, X.; Cheng, D.; Zhang, Z.; Lin, S.; Dai, J. An Empirical Study of Spatial Attention Mechanisms in Deep Networks. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 6687–6696. [Google Scholar]
- Lieskovská, E.; Jakubec, M.; Jarina, R.; Chmulík, M. A Review on Speech Emotion Recognition Using Deep Learning and Attention Mechanism. Electronics 2021, 10, 1163. [Google Scholar] [CrossRef]
- Qin, B.; Sun, F.; Shen, W.; Dong, B.; Ma, S.; Huo, X.; Lan, P. Deep Learning-Based Pine Nematode Trees’ Identification Using Multispectral and Visible UAV Imagery. Drones 2023, 7, 183. [Google Scholar] [CrossRef]
- Ge, C.; Li, F.; Sun, F.; Wang, Z.; Lan, P. A Monitoring Scheme for Pine Wood Nematode Disease Tree Based on Deep Learning and Ground Monitoring. In Signal and Information Processing, Networking and Computers; Springer: Singapore, 2023; pp. 1268–1275. [Google Scholar]
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable Bag-of-Freebies Sets New State-of-the-Art for Real-Time Object Detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. arXiv 2019, arXiv:1709.01507. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. arXiv 2020, arXiv:1910.03151. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.-Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. arXiv 2018, arXiv:1807.06521. [Google Scholar]
- Yang, L.; Zhang, R.Y.; Li, L.; Xie, X. Simam: A simple, parameter-free attention module for convolutional neural networks. In Proceedings of the International Conference on Machine Learning, Virtual Event, 18–24 July 2021; PMLR. Volume 139, pp. 11863–11874. [Google Scholar]
- Huang, X.; Gang, W.; Li, J.; Wang, Z.; Wang, Q.; Liang, Y. Extraction of pine wilt disease based on a two-stage unmanned aerial vehicle deep learning method. J. Appl. Remote Sens. 2024, 18, 014503. [Google Scholar] [CrossRef]
- Ye, X.; Pan, J.; Shao, F.; Liu, G.; Lin, J.; Xu, D.; Liu, J. Exploring the potential of visual tracking and counting for trees infected with pine wilt disease based on improved YOLOv5 and StrongSORT algorithm. Comput. Electron. Agric. 2024, 218, 108671. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | Recall | F1 | |
|---|---|---|---|
| YOLO v7 | 0.6739 | 0.8072 | 0.7346 |
| SE | 0.6934 | 0.8179 | 0.7505 |
| CBAM | 0.6688 | 0.8098 | 0.7326 |
| SimAM | 0.6367 | 0.8443 | 0.7259 |
| ECA | 0.6487 | 0.8047 | 0.7183 |
| YOLO v7 | SE | CBAM | SimAM | ECA | |
|---|---|---|---|---|---|
| Manual detection of symptomatic trees | 1843 | 1843 | 1843 | 1843 | 1843 |
| Model detection of symptomatic trees | 1722 | 1779 | 2031 | 1662 | 1736 |
| Correct detection of symptomatic trees | 1564 | 1651 | 1739 | 1545 | 1512 |
| Precision rate | 0.9082 | 0.9281 | 0.8562 | 0.9296 | 0.8710 |
| Recall rate | 0.8486 | 0.8958 | 0.9435 | 0.8383 | 0.8204 |
| F1 score | 0.8774 | 0.9117 | 0.8977 | 0.8816 | 0.8449 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Wang, R.; Shi, W.; Liu, X.; Ren, Y.; Xu, S.; Wang, X. Detection of Pine-Wilt-Disease-Affected Trees Based on Improved YOLO v7. Forests 2024, 15, 691. https://doi.org/10.3390/f15040691
Zhu X, Wang R, Shi W, Liu X, Ren Y, Xu S, Wang X. Detection of Pine-Wilt-Disease-Affected Trees Based on Improved YOLO v7. Forests. 2024; 15(4):691. https://doi.org/10.3390/f15040691
Chicago/Turabian StyleZhu, Xianhao, Ruirui Wang, Wei Shi, Xuan Liu, Yanfang Ren, Shicheng Xu, and Xiaoyan Wang. 2024. "Detection of Pine-Wilt-Disease-Affected Trees Based on Improved YOLO v7" Forests 15, no. 4: 691. https://doi.org/10.3390/f15040691
APA StyleZhu, X., Wang, R., Shi, W., Liu, X., Ren, Y., Xu, S., & Wang, X. (2024). Detection of Pine-Wilt-Disease-Affected Trees Based on Improved YOLO v7. Forests, 15(4), 691. https://doi.org/10.3390/f15040691