
Stress Wave Hybrid Imaging for Detecting Wood Internal Defects under Sparse Signals

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Data Acquisition
2.2. Proposed Imaging Method
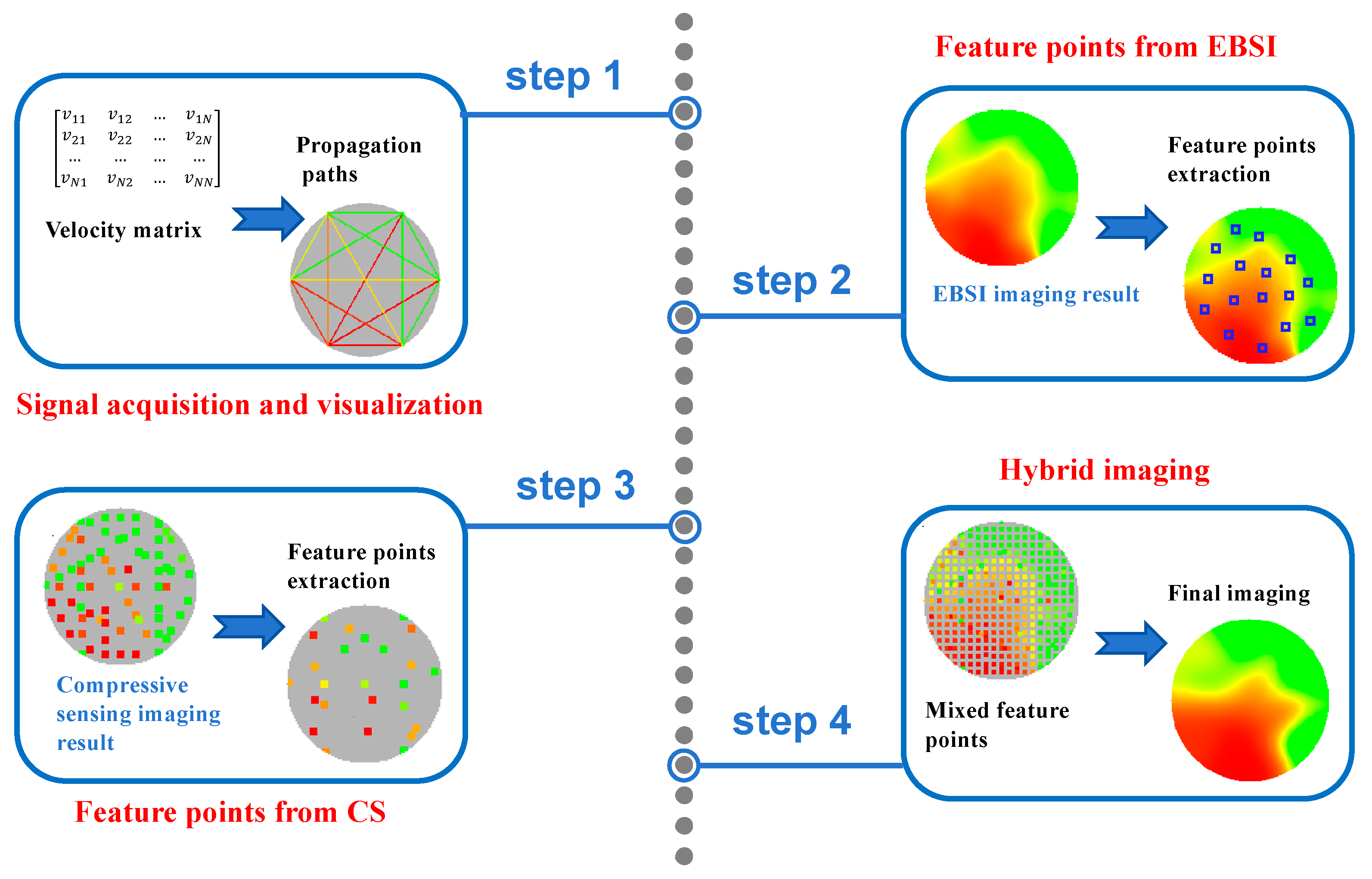
- (1)
- Feature point extraction strategy in compressed sensing imaging results.
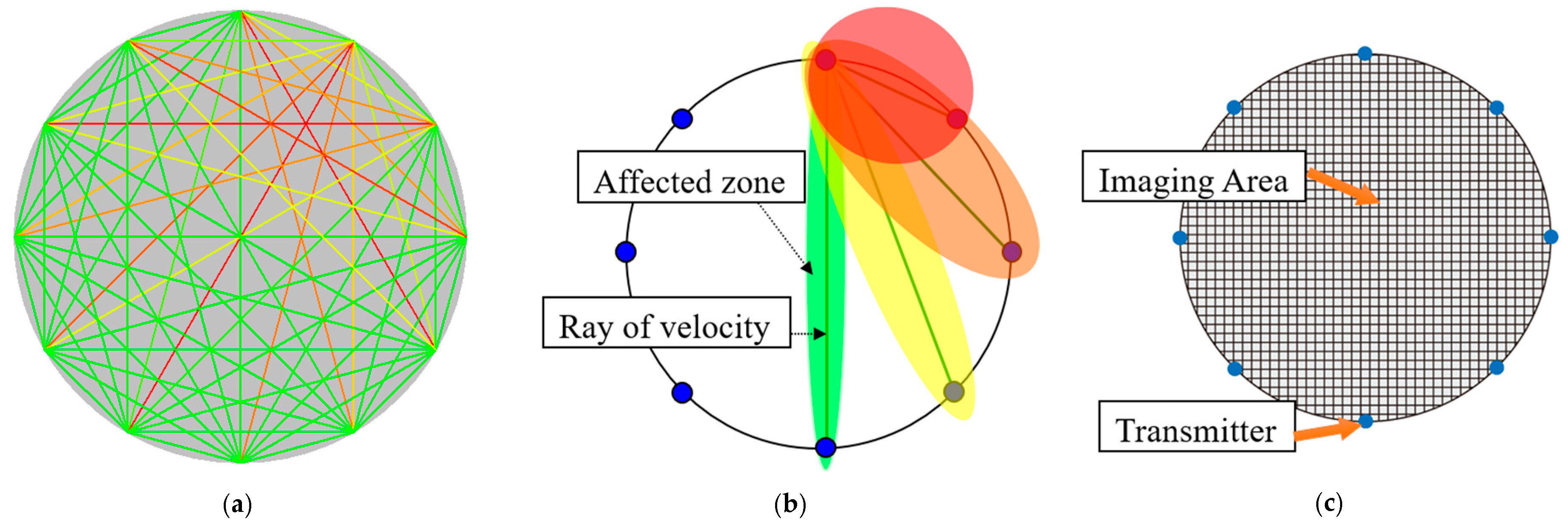
- (2)
- Feature point extraction strategy in EBSI imaging results.
3. Results and Discussion
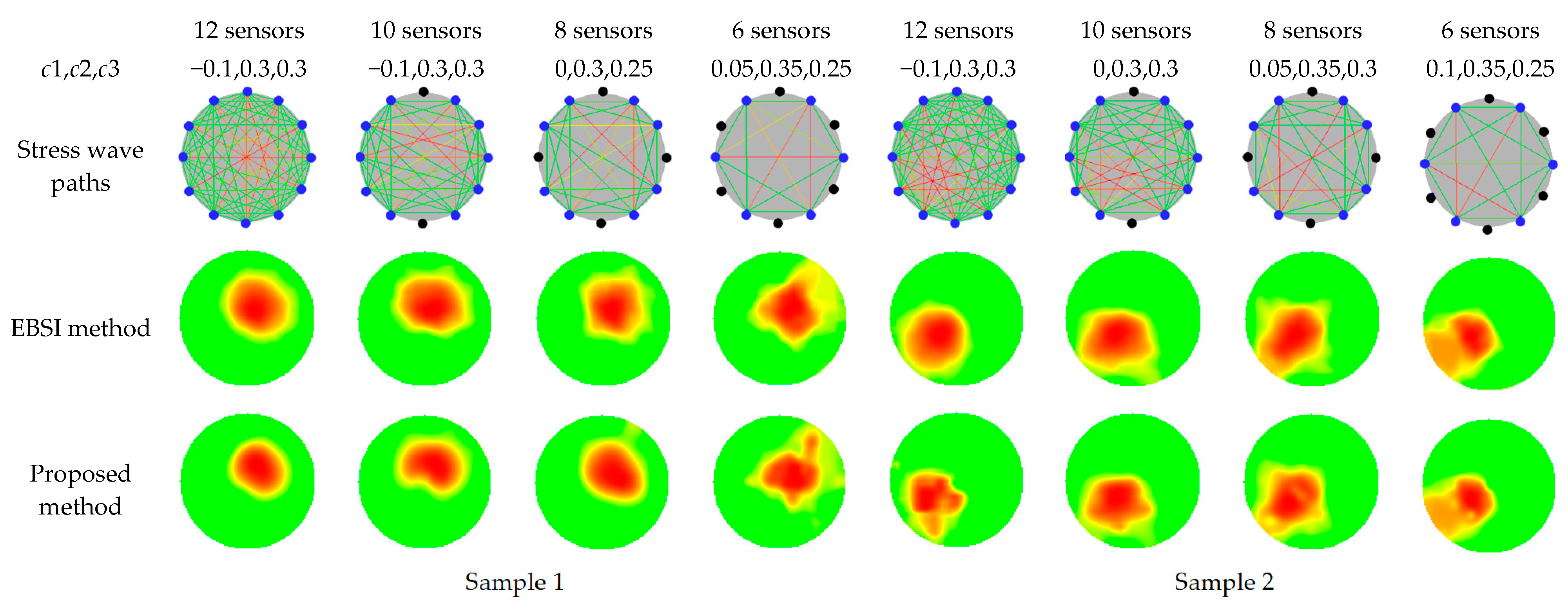
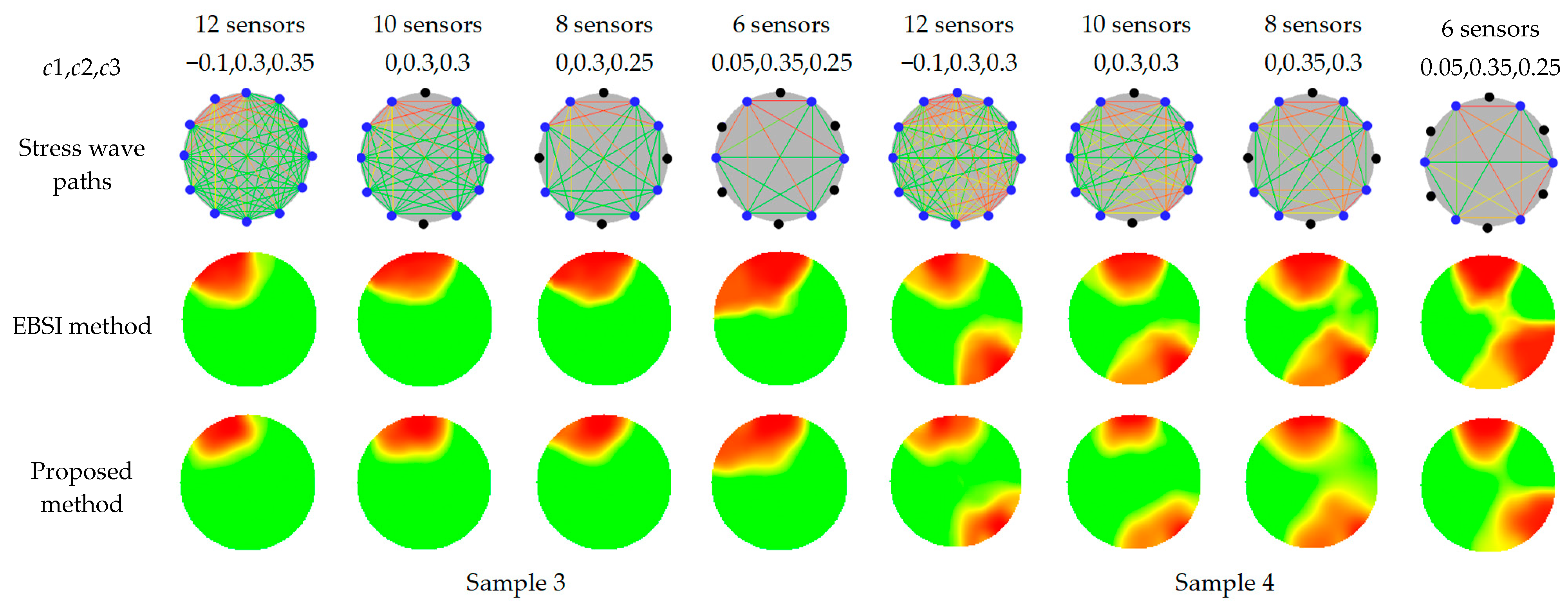
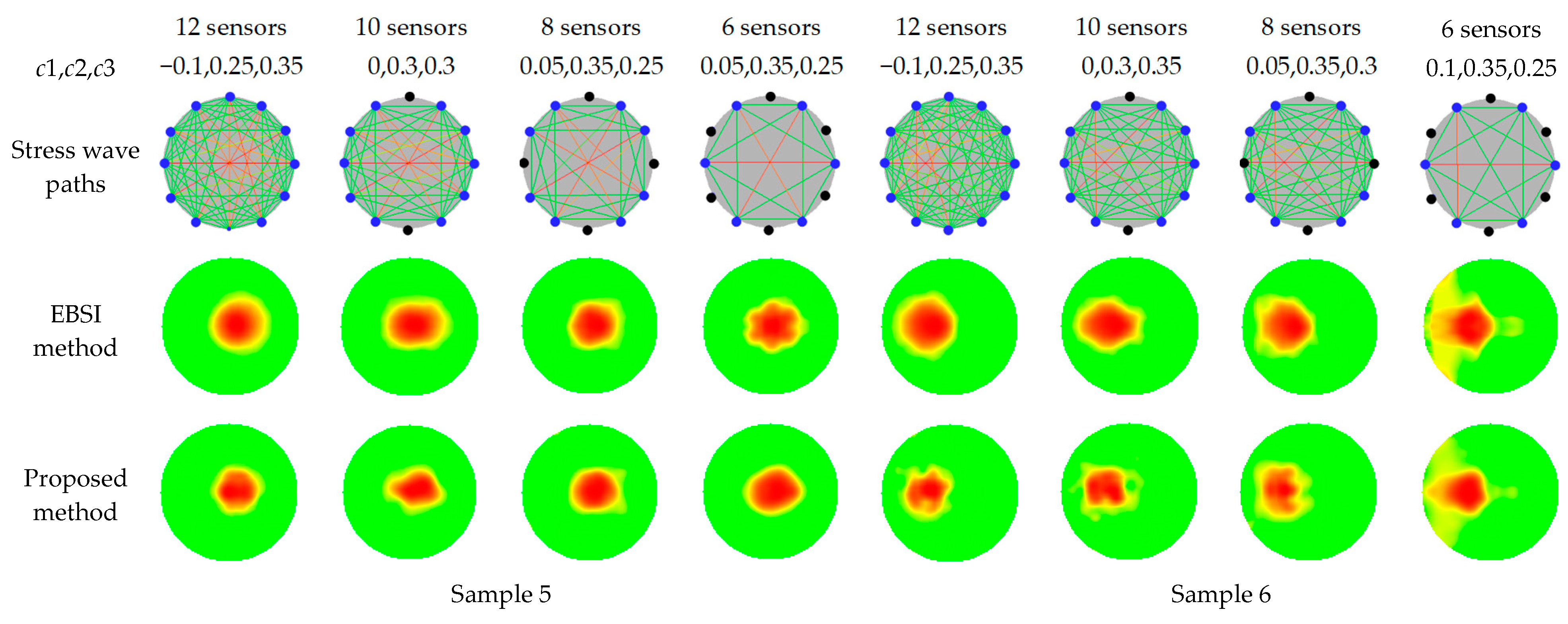
3.1. Imaging Results When the Number of Sensors Decreases
3.2. Defects Area Analysis
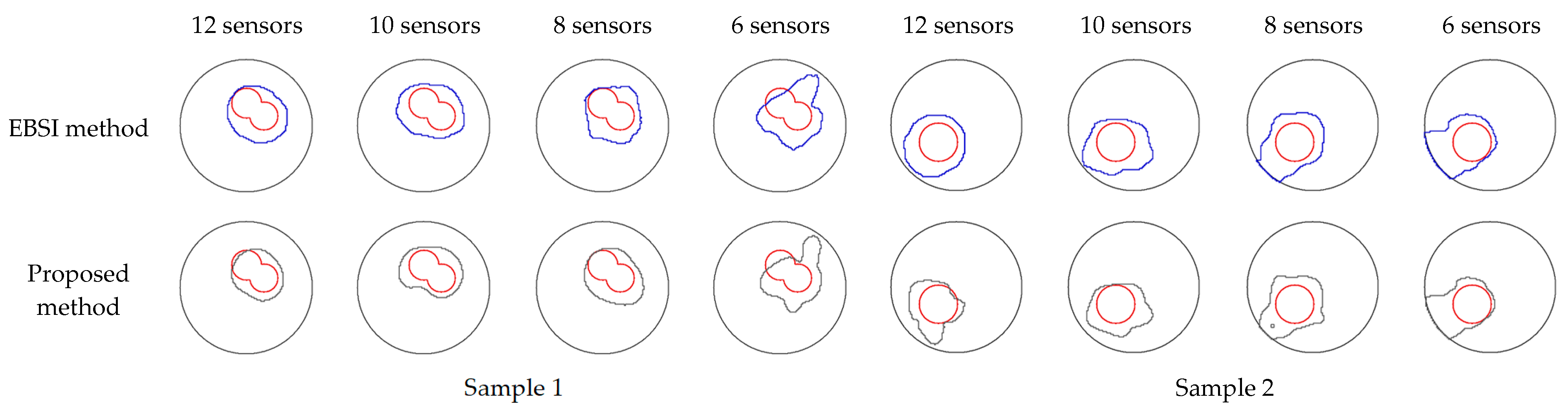
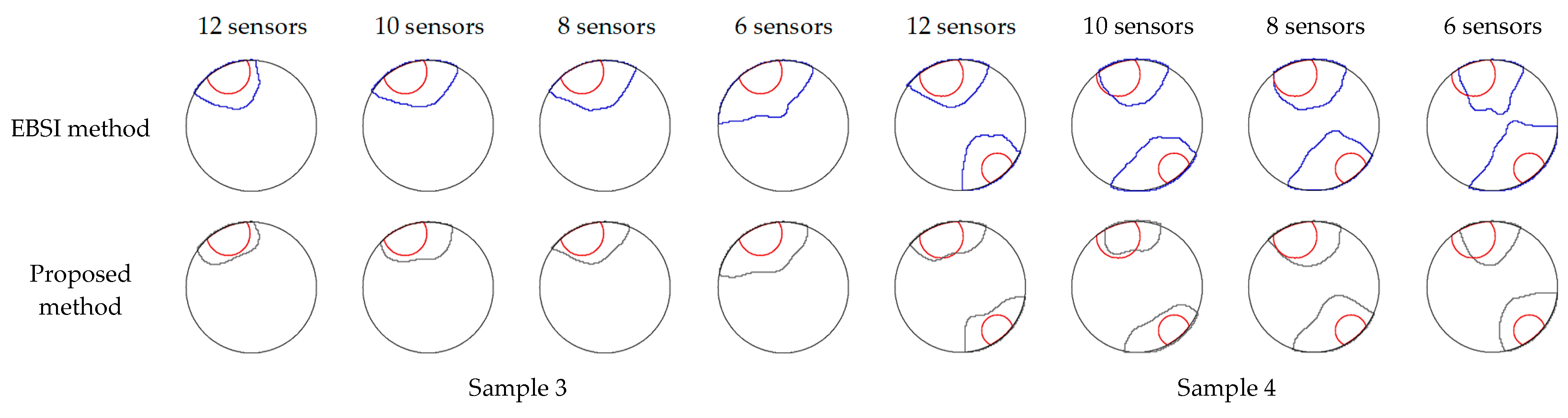
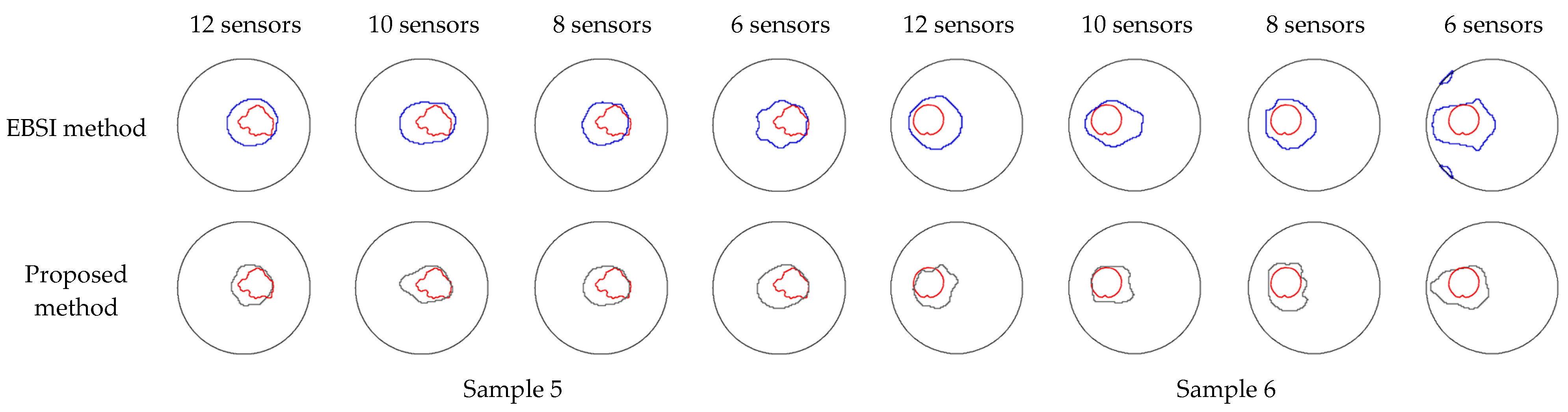
3.3. Defects Shape Analysis
3.4. The Visual Impact of Feature Points Extraction on Imaging Results
4. Conclusions
- (1)
- With the decrease in the number of sensors and stress wave signals, the imaging effect of the EBSI algorithm and the algorithm proposed in this paper will become worse. However, regardless of the number of sensors, for all samples, compared with the traditional EBSI method, the defect area reconstructed by the proposed method is closer to the actual defect area, and the defect contour reconstructed by the proposed method is also more similar to the actual defect contour.
- (2)
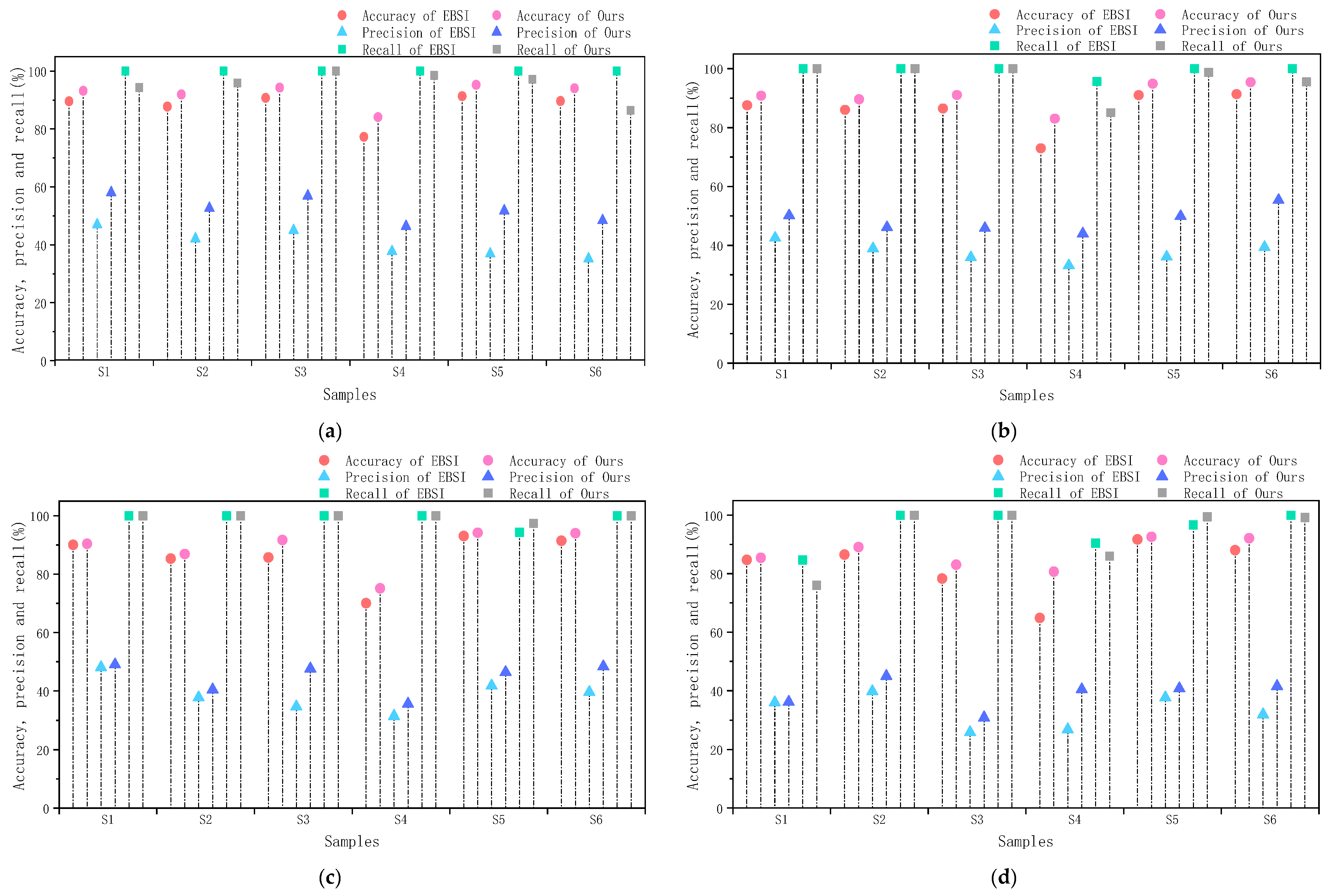
- When the number of sensors is 12, 10, 8, and 6, respectively, the average accuracy of the proposed algorithm is 4.4%, 4.9%, 2.8%, and 4.8% higher than that of the EBSI algorithm, and the average accuracy is 11.7%, 10.9%, 5.8%, and 6.1% higher than that of the EBSI algorithm. The overall accuracy of the proposed algorithm reaches 89.7%, while the overall accuracy of the EBSI algorithm is only 85.5%. The ability of the proposed algorithm to resist the reduction of stress wave signals is indicated.
- (3)
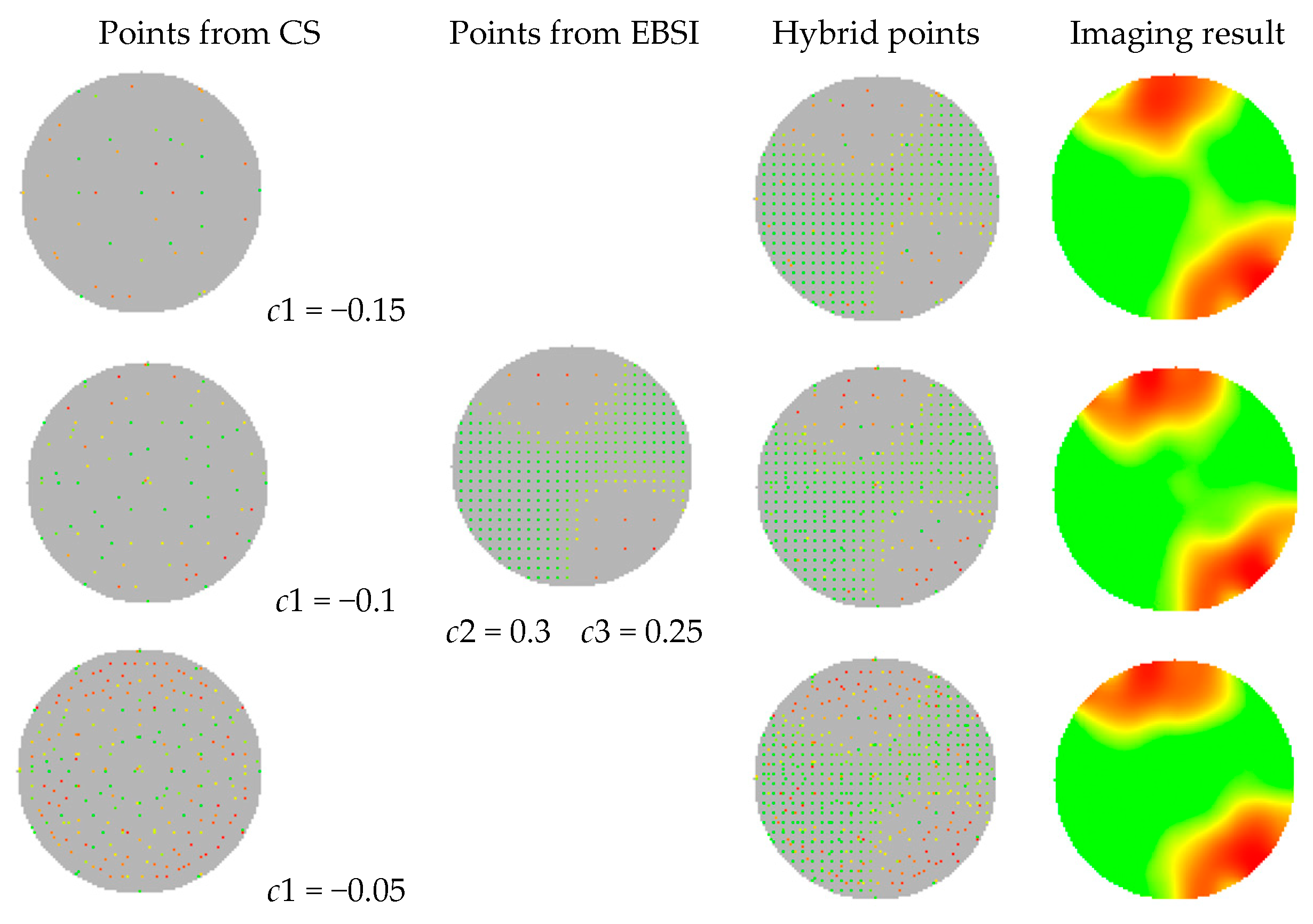
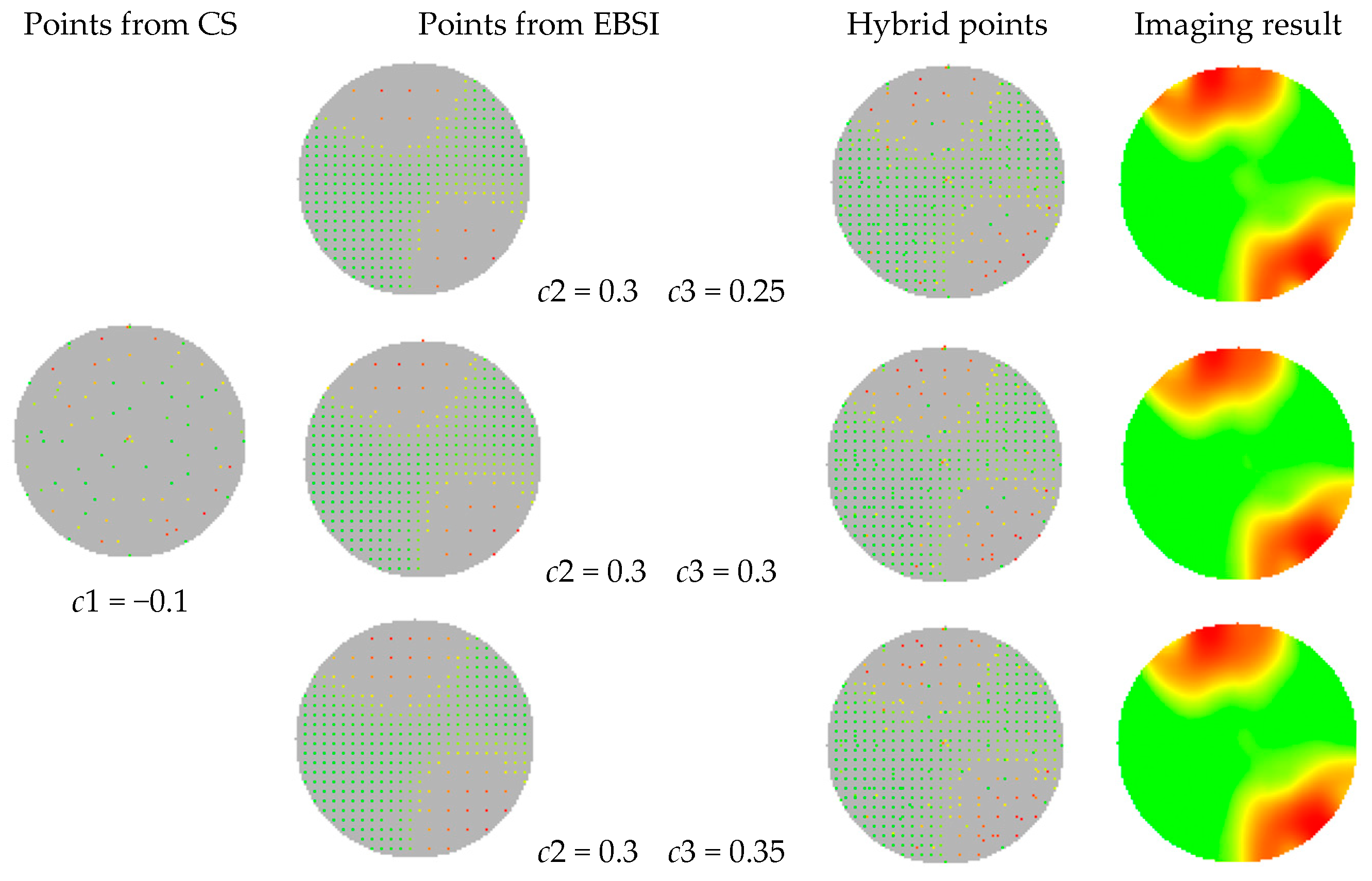
- The proper value range of control coefficient c1 is −0.1~0.1. When the number of sensors decreases, c1 gradually increases, indicating that the fewer signals, the higher the participation of the compressive sensing method, which reflects the ability of the theory to reconstruct the velocity distribution in the defect area. The proper value range of control coefficient c2 is 0.25~0.35. When the number of sensors decreases, c2 gradually increases, indicating that the fewer the signals, the higher the participation of the EBSI method. The proper value range of control coefficient c3 is 0.25~0.35. When the number of sensors decreases, c3 gradually decreases, indicating that the fewer the signals, the higher the participation of EBSI in reconstructing healthy areas and the effective boundary suppression of defect areas.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nasir, V.; Ayanleye, S.; Kazemirad, S.; Sassani, F.; Adamopoulos, S. Acoustic emission monitoring of wood materials and timber structures: A critical review. Constr. Build. Mater. 2022, 350, 128877. [Google Scholar] [CrossRef]
- Simic, K.; Gendvilas, V.; O’reilly, C.; Harte, A.M. Predicting structural timber grade-determining properties using acoustic and density measurements on young sitka spruce trees and logs. Holzforschung 2019, 73, 139–149. [Google Scholar] [CrossRef]
- Cascón, I.; Sarasua, J.; Tena, M.; Uria, A. Development of an acoustic method for wood disease assessment. Comput. Electron. Agric. 2021, 186, 106195. [Google Scholar] [CrossRef]
- Rinn, F.; Schweingruber, F.; Schär, E. RESISTOGRAPH and X-ray Density Charts of Wood. Comparative Evaluation of Drill Resistance Profiles and X-ray Density Charts of Different Wood Species. Holzforschung 1996, 50, 303–311. [Google Scholar] [CrossRef]
- Tannert, T.; Anthony, R.; Kasal, B.; Kloiber, M.; Piazza, M.; Riggio, M.; Rinn, F.; Widmann, R. In Situ Assessment of Structural Timber Using Semi-Destructive Techniques. Mater. Struct. 2013, 47, 767–785. [Google Scholar] [CrossRef]
- Kobza, M.; Ostrovsk, R.; Adamčíková, K.; Pastirčáková, K. Stability of trees infected by wood decay fungi estimated by acoustic tomography: A field survey. Trees 2021, 36, 103–112. [Google Scholar] [CrossRef]
- Yang, R.; Xu, Y. Experimental study on dynamic compression behavior characteristics and stress wave propagation law of rigid-flexible combinations under cyclic bi-directional impact loading. J. Mater. Res. Technol. 2023, 25, 925–945. [Google Scholar] [CrossRef]
- Bandara, S.; Rajeev, P.; Gad, E.; Sriskantharajah, B.; Flatley, I. Structural health assessment of timber utility poles using stress wave propagation and artificial neural network techniques. J. Nondestruct. Eval. 2021, 40, 87. [Google Scholar] [CrossRef]
- Yang, L.; Dong, X.; Xu, H. Comparison between electrical resistance method and stress wave method in the detection of decay defects in living trees. For. Eng. 2022, 38, 82–88. [Google Scholar]
- Yamasaki, M.; Tsuzuki, C.; Sasaki, Y.; Onishi, Y. Influence of moisture content on estimating young’s modulus of full-scale timber using stress wave velocity. J. Wood Sci. 2017, 63, 225–235. [Google Scholar] [CrossRef]
- Van, D.; Dan, R. Estimating mechanical properties of clear wood from ten-year-old melia azedarach trees using the stress wave method. Eur. J. Wood Wood Prod. 2021, 79, 941–949. [Google Scholar]
- Wessels, C.; Malan, F.; Rypstra, T. A review of measurement methods used on standing trees for the prediction of some mechanical properties of timber. Eur. J. For. Res. 2011, 130, 881–893. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Wang, L.; Allison, R. Acoustic tomography in relation to 2d ultrasonic velocity and hardness mappings. Wood Sci. Technol. 2012, 46, 551–561. [Google Scholar] [CrossRef]
- Legg, M.; Bradley, S. Measurement of stiffness of standing trees and felled logs using acoustics: A review. J. Acoust. Soc. Am. 2017, 139, 588–604. [Google Scholar] [CrossRef] [PubMed]
- Yue, X.; Wang, L.; Wacker, J. Electric resistance tomography and stress wave tomography for decay detection in trees—A comparison study. PeerJ 2019, 7, e6444. [Google Scholar] [CrossRef] [PubMed]
- Rabe, C.; Ferner, D.; Fink, S.; Schwarze, F. Detection of decay in trees with stress waves and interpretation of acoustic tomograms. Arboric. Assoc. J. 2004, 28, 3–19. [Google Scholar] [CrossRef]
- Arciniegas, A.; Brancheriau, L.; Lasaygues, P. Tomography in standing trees: Revisiting the determination of acoustic wave velocity. Ann. For. Sci. 2015, 72, 685–691. [Google Scholar] [CrossRef]
- Huan, Z.; Jiao, Z.; Li, G.; Wu, X. Velocity error correction based tomographic imaging for stress wave nondestructive evaluation of wood. BioResources 2018, 13, 2530–2545. [Google Scholar] [CrossRef]
- Liu, L.; Li, G. Acoustic tomography based on hybrid wave propagation model for tree decay detection. Comput. Electron. Agric. 2018, 151, 276–285. [Google Scholar] [CrossRef]
- Qiu, Q.; Qin, R.; Lam, J.; Tang, A.; Leung, M.; Lau, D. An innovative tomographic technique integrated with acoustic-laser approach for detecting defects in tree trunk. Comput. Electron. Agric. 2019, 156, 129–137. [Google Scholar] [CrossRef]
- Du, X.; Li, S.; Li, G.; Feng, H.; Chen, S. Stress Wave Tomography of Wood Internal Defects using Ellipse-Based Spatial Interpolation and Velocity Compensation. Bioresources 2015, 10, 3948–3962. [Google Scholar] [CrossRef]
- Qin, R.; Qiu, Q.; Lam, J.; Tang, A.; Leung, M.; Lau, D. Health assessment of tree trunk by using acoustic-laser technique and sonic tomography. Wood Sci. Technol. 2018, 52, 1113–1132. [Google Scholar] [CrossRef]
- Strobel, A.; Renato, J.; Carvalho, G.; Antonio, M.; Goncalves, R. Quantitative image analysis of acoustic tomography in woods. Eur. J. Wood Wood Prod. 2018, 76, 1379–1389. [Google Scholar] [CrossRef]
- Ross, R.; Brashaw, B.; Pellerin, R. Nondestructive evaluation of wood. For. Prod. J. 1998, 48, 14–19. [Google Scholar]
- Dackermann, U.; Crews, K.; Kasal, B.; Li, J.; Riggio, M.; Rinn, F.; Tannert, T. In situ assessment of structural timber using stress-wave measurements. Mater. Struct. 2014, 47, 787–803. [Google Scholar] [CrossRef]
- Chen, L.-C.; Pardeshi, M.S.; Lo, W.-T.; Sheu, R.-K.; Pai, K.-C.; Chen, C.-Y.; Tsai, P.-Y.; Tsai, Y.-T. Edge-glued wooden panel defect detection using deep learning. Wood Sci. Technol. 2022, 56, 477–507. [Google Scholar] [CrossRef]
- Guo, J.; Wang, P.; Wang, Y.; Xu, H. Improving tree health assessment accuracy at low temperatures: Considering the effect of trunk ice content on electrical resistance and stress wave tomography. J. For. Res. 2023, 34, 1503–1510. [Google Scholar] [CrossRef]
- Xu, F.; Liu, Y.; Wang, X.; Brashaw, B.K.; Yeary, L.A.; Ross, R.J. Assessing internal soundness of hardwood logs through acoustic impact test and waveform analysis. Wood Sci. Technol. 2019, 53, 1111–1134. [Google Scholar] [CrossRef]
- Du, X.; Li, J.; Feng, H.; Chen, S. Image reconstruction of internal defects in wood based on segmented propagation rays of stress waves. Appl. Sci. 2018, 8, 1778. [Google Scholar] [CrossRef]
- Zheng, Q.; Zhao, W.; Xu, F.; Liu, Y. Wood stresswave nondestructive testing tomography algorithm based on asymmetric ellipse. J. For. Eng. 2023, 8, 137–143. [Google Scholar]
- Liu, T.; Li, G. Stress wave tomography imaging algorithm based on ray segmentation for nondestructive testing of Wood. Sci. Silvae Sin. 2021, 57, 181–192. [Google Scholar]
- Liang, S.; Fu, F. Effect of sensor number and distribution on accuracy rate of wood defect detection with stress wave tomography. Wood Res. 2014, 59, 521–531. [Google Scholar]
- Giryes, R.; Eldar, Y.; Bronstein, A.; Sapiro, G. Tradeoffs between convergence speed and reconstruction accuracy in inverse problems. IEEE Trans. Signal Process. 2018, 66, 1676–1690. [Google Scholar] [CrossRef]
- Wang, X. Acoustic measurements on trees and logs: A review and analysis. Wood Fiber Sci. 2013, 47, 965–975. [Google Scholar] [CrossRef]
- Fang, Y.; Feng, H.; Li, J.; Li, G. Stress wave signal denoising using ensemble empirical mode decomposition and an instantaneous half period model. Sensors 2011, 11, 7554–7567. [Google Scholar] [CrossRef]
- Donoho, L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Chartrand, R.; Staneva, V. Restricted isometry properties and nonconvex compressive sensing. Inverse Probl. 2010, 24, 657–682. [Google Scholar]
- Ji, S.; Dunson, D.; Carin, L. Multitask Compressive Sensing. IEEE Trans. Signal Process. 2009, 57, 92–106. [Google Scholar] [CrossRef]
- Yoon, H.; Kim, K.; Kim, D. Motion Adaptive Patch-Based Low-Rank Approach for Compressed Sensing Cardiac Cine MRI. IEEE Trans. Med. Imaging 2014, 33, 2069–2085. [Google Scholar] [CrossRef]
- Valiollahzadeh, S.; Clark, J.; Mawlawi, O. MO-D-141-05: Dictionary Learning in Compressed Sensing Using Undersampled Data in PET Imaging. Med. Phys. 2013, 40, 400. [Google Scholar] [CrossRef]
- Liu, J.; Lian, F.; Mallick, M. Distributed compressed sensing based joint detection and tracking for multistatic radar system. Inf. Sci. 2016, 369, 100–118. [Google Scholar] [CrossRef]
- Wu, X.; Huang, G.; Wang, J. Image reconstruction method of electrical capacitance tomography based on compressed sensing principle. Meas. Sci. Technol. 2013, 24, 075401. [Google Scholar] [CrossRef]
- Zhang, W.; Tan, C.; Xu, Y. Electrical Resistance Tomography Image Reconstruction Based on Modified OMP Algorithm. IEEE Sens. J. 2019, 19, 5723–5731. [Google Scholar] [CrossRef]
- Hettler, J.; Tabatabaeipour, M.; Delrue, S.; Van, D. Linear and nonlinear guided wave imaging of impact damage in cfrp using a probabilistic approach. Materials 2016, 9, 901. [Google Scholar] [CrossRef]
- Xu, L.; Lu, C.; Zhou, T.; Wu, J.; Feng, H. A 3D-2DCNN-CA approach for enhanced classification of hickory tree species using UAV-based hyperspectral imaging. Microchem. J. 2024, 199, 109981. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, X.; Zheng, Y.; Feng, H. Stress Wave Hybrid Imaging for Detecting Wood Internal Defects under Sparse Signals. Forests 2024, 15, 1139. https://doi.org/10.3390/f15071139
Du X, Zheng Y, Feng H. Stress Wave Hybrid Imaging for Detecting Wood Internal Defects under Sparse Signals. Forests. 2024; 15(7):1139. https://doi.org/10.3390/f15071139
Chicago/Turabian StyleDu, Xiaochen, Yilei Zheng, and Hailin Feng. 2024. "Stress Wave Hybrid Imaging for Detecting Wood Internal Defects under Sparse Signals" Forests 15, no. 7: 1139. https://doi.org/10.3390/f15071139