
Detection of Mulberry Leaf Diseases in Natural Environments Based on Improved YOLOv8


Abstract
1. Introduction
2. Materials and Methods
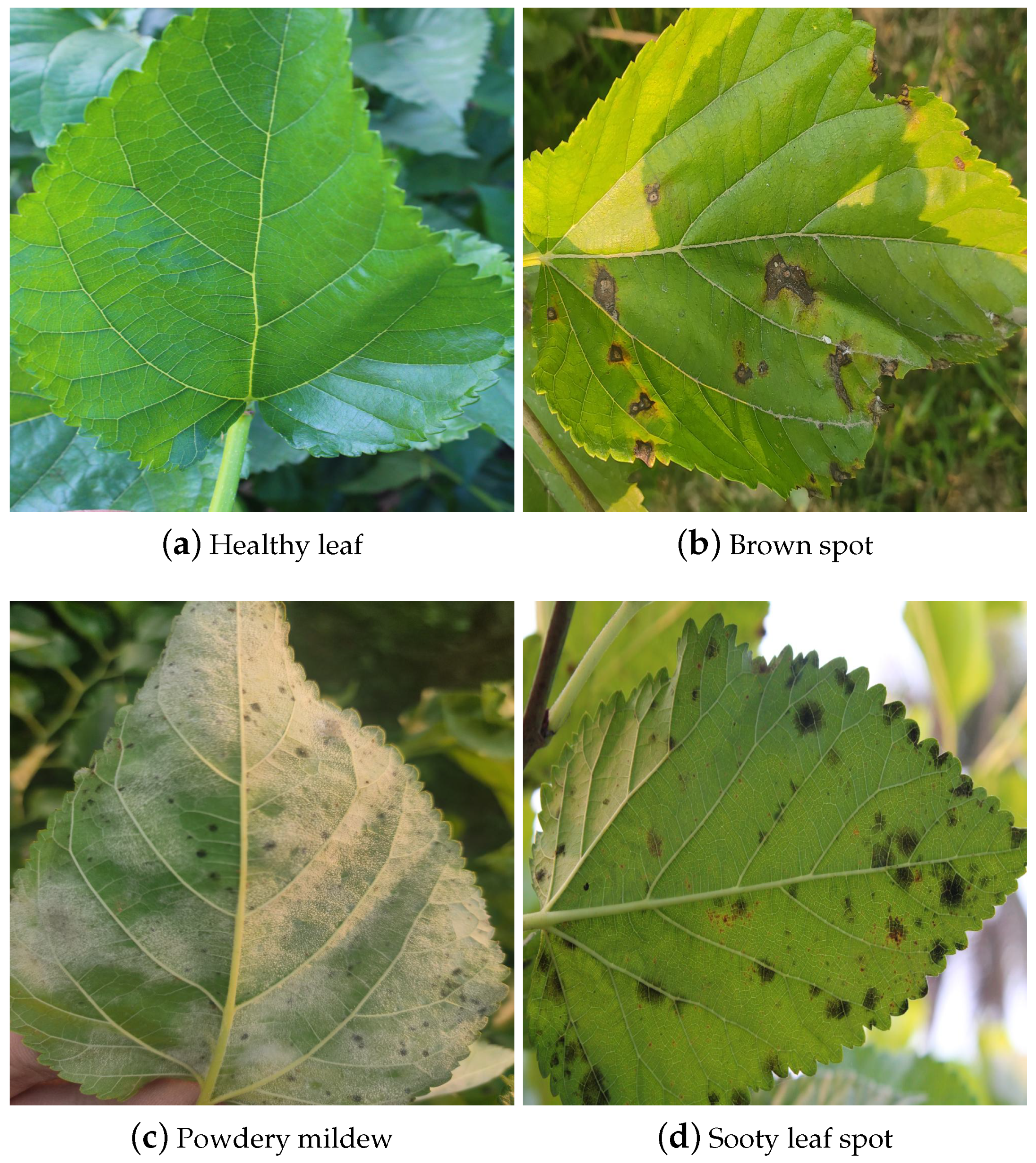
2.1. Dataset Construction
2.2. YOLOv8 Algorithm
2.3. Improved YOLOv8 Algorithm
- (1)
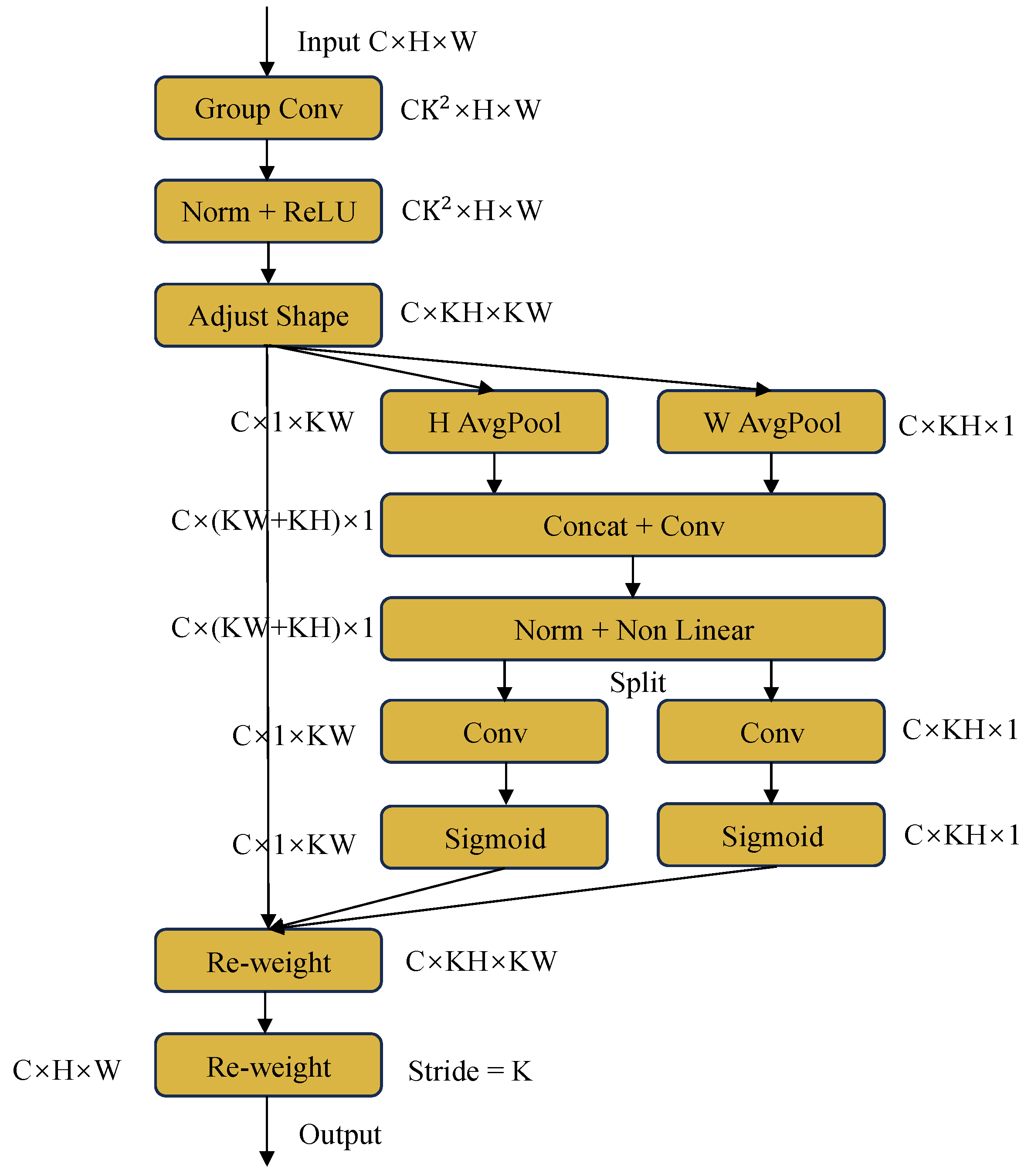
- The Bottleneck in the C2f module is replaced with the RFMD Module, which consists of the CBS module, RFCA Conv, and MDFA. The RFMD Module uses the MDFA module proposed in this paper, which focuses on features from the pixel-level dimension, spatial dimension, and channel dimension. This enhances the extraction of effective feature information from channels while integrating both global and local spatial information. Additionally, the RFCA Conv not only focuses on important local information at each receptive field level but also enables the model to more precisely locate defect positions during detection, addressing the parameter sharing issue inherent in traditional convolutions.
- (2)
- The CBS modules in P3, P4, and P5 of the backbone network, as well as the CBS modules in the neck network, are replaced with the ADown down-sampling structure. This structure utilizes a variety of down-sampling methods to extract features, thereby preventing the loss of critical information while simultaneously reducing both computational complexity and model size.
- (3)
- The original YOLOv8’s CIOU loss function has been replaced with NWD loss, enhancing the detection precision of small targets.
2.3.1. MDFA Attention
2.3.2. RFCA Conv in the RFMD Module
2.3.3. Lightweight Down-Sampling Structure ADown
2.3.4. Normalized Wasserstein Distance Loss Function
2.4. Training Environment and Evaluation Metrics
2.4.1. Training Environment
2.4.2. Evaluation Metrics
3. Results
3.1. Performance Comparison of Various Object Detection Models
3.2. Different Attention Module Detection Performance Comparison
3.3. The Results before and after Improvement of the YOLOv8 Model
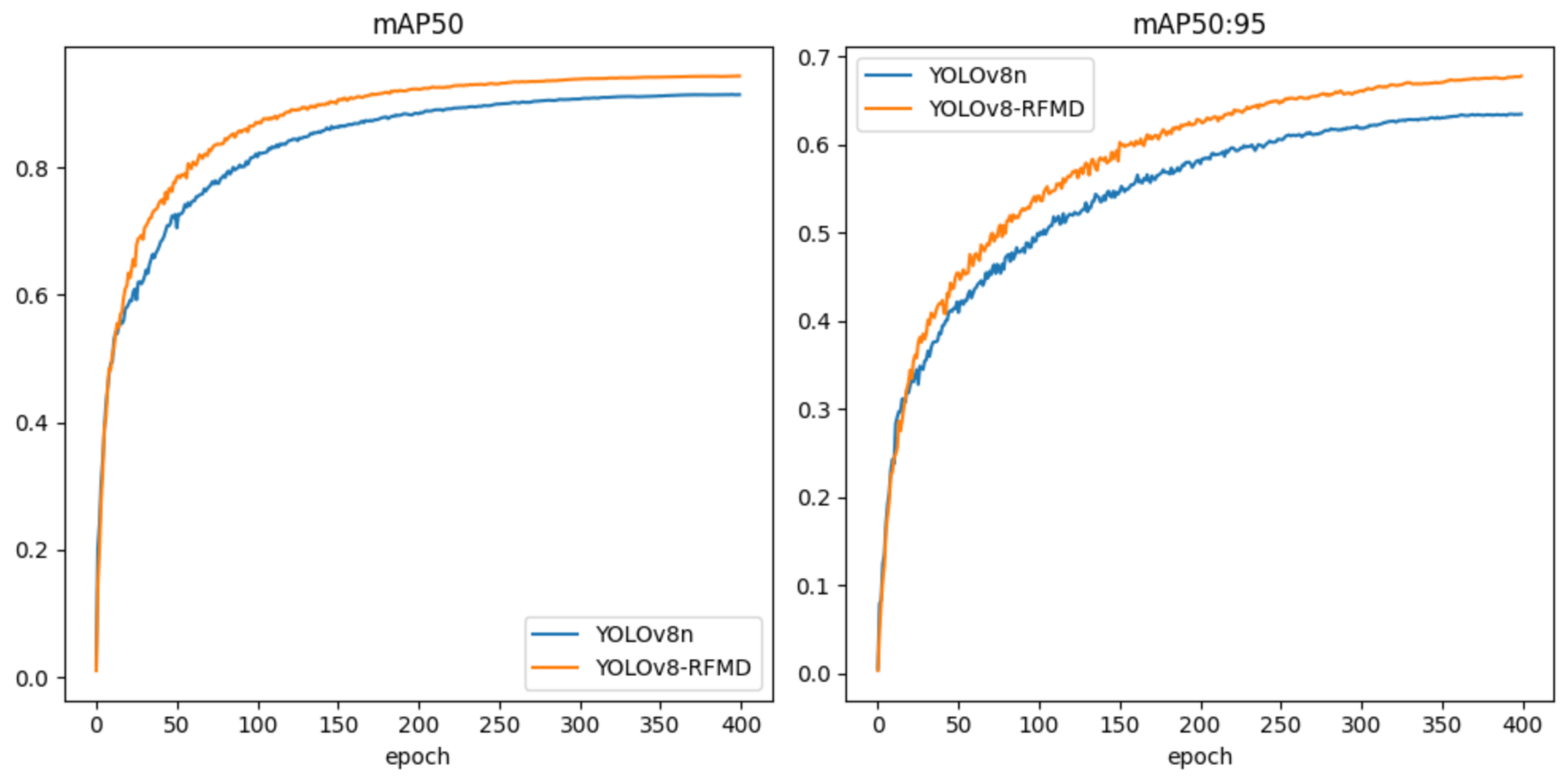
3.3.1. The Comparison of mAP50 and mAP50:95 before and after Improvement
3.3.2. Confusion Matrix
3.4. Performance Comparison of Ablation Experiments
3.5. Different Models Detection Visualization Results Analysis
4. Discussion
5. Conclusions
- (1)
- The Multi-Dimension Feature Attention (MDFA) module successfully integrated important features at the pixel-level, spatial, and channel dimensions, enhancing the extraction of effective information.
- (2)
- The RFMD Module, composed of the CBS module, RFCA Conv, and MDFA, effectively replaced the Bottleneck in the Residual block, improving the model’s ability to capture local and global disease features.
- (3)
- The ADown down-sampling structure effectively reduced the model size and computational load while maintaining high precision.
- (4)
- Replacing the CIOU loss function with the NWD loss function significantly enhanced the detection of small disease features.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| YOLOv8 | You Only Look Once version 8 |
| MDFA | Multi-Dimension Feature Attention |
| CBS | Conv-BatchNomalization-SiLU |
| C2f | Faster Implementation of CSP Bottleneck with two convolutions |
| C3 | CSP Bottleneck with three convolutions |
| NWD | Normalized Wasserstein Distance |
| IoU | Intersection over Union |
| mAP | Mean Average Precision |
| mAP50 | MAP values at the 50% loU threshold |
| mAP50:95 | MAP values in the 50-95% loU threshold range |
| VGG | Visual Geometry Group |
| CNN | Convolutional neural network |
| Faster R-CNN | Faster region-based convolutional neural networks |
| SSP | Spatial pyramid pooling |
| CSP | Cross Stage Partial |
| ELAN | Efficient Layer Aggregation Network |
| SPPF | Spatial pyramid pooling fusion |
| PAN | Path aggregation network |
| FPN | Feature pyramid network |
| DF Loss | Distribution focal loss |
| CIOU | Complete Intersection over Union |
| BCE | Binary cross-entropy |
| SE | Squeeze-and-excitation |
| ECA | Efficient Channel Attention |
| CBAM | Convolutional Block Attention Module |
| UNAP | Un average pooling |
| RFCA | Receptive-Field Coordinated Attention |
| CA | Coordinated Attention |
| SSD | Single Shot Multibox Detector |
| MLCA | Mixed Local Channel Attention |
| EMA | Efficient Multi-Scale Attention |
| LSKA | Large Separable Kernel Attention |
| GFLOPs | Giga Floating-Point Operations Per second |
References
- Rohela, G.K.; Shukla, P.; Kumar, R.; Chowdhury, S.R. Mulberry (Morus spp.): An ideal plant for sustainable development. Trees For. People 2020, 2, 100011. [Google Scholar] [CrossRef]
- Reddy, M.P.; Deeksha, A. Mulberry leaf disease detection using yolo. Int. J. Adv. Res. Ideas Innov. Technol. 2021, 7, 3. [Google Scholar]
- Gnanesh, B.N.; Arunakumar, G.S.; Tejaswi, A.; Supriya, M.; Pappachan, A.; Harshitha, M.M. Molecular Diagnostics of Soil-Borne and Foliar Diseases of Mulberry: Present Trends and Future Perspective. In The Mulberry Genome; Springer International Publishing: Cham, Switzerland, 2023; pp. 215–241. [Google Scholar]
- Andreychev, A.V. A new methodology for studying the activity of underground mammals. Biol. Bull. 2018, 45, 937–943. [Google Scholar] [CrossRef]
- Xie, Y.; Yu, W. Remote Monitoring of Amur Tigers in Forest Ecosystems Using Improved YOLOX Algorithm. Forests 2023, 14, 2000. [Google Scholar] [CrossRef]
- Ngugi, H.N.; Ezugwu, A.E.; Akinyelu, A.A.; Abualigah, L. Revolutionizing crop disease detection with computational deep learning: A comprehensive review. Environ. Monit. Assess. 2024, 196, 302. [Google Scholar] [CrossRef] [PubMed]
- Javidan, S.M.; Banakar, A.; Vakilian, K.A.; Ampatzidis, Y. Diagnosis of grape leaf diseases using automatic K-means clustering and machine learning. Smart Agric. Technol. 2023, 3, 100081. [Google Scholar] [CrossRef]
- Sladojevic, S.; Arsenovic, M.; Anderla, A.; Culibrk, D.; Stefanovic, D. Deep neural networks based recognition of plant diseases by leaf image classification. Comput. Intell. Neurosci. 2016, 2016, 3289801. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Rangarajan, A.K.; Purushothaman, R.; Ramesh, A. Tomato crop disease classification using pre-trained deep learning algorithm. Procedia Comput. Sci. 2018, 133, 1040–1047. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Nahiduzzaman, M.; Chowdhury, M.E.H.; Salam, A.; Nahid, E.; Ahmed, F.; AL-Emadi, N.; Ayari, M.A.; Khandakar, A.; Haider, J. Explainable deep learning model for automatic mulberry leaf disease classification. Front. Plant Sci. 2023, 14, 1175515. [Google Scholar] [CrossRef] [PubMed]
- Waheed, A.; Goyal, M.; Gupta, D.; Khanna, A.; Hassanien, A.E.; Pandey, H.M. An optimized dense convolutional neural network model for disease recognition and classification in corn leaf. Comput. Electron. Agric. 2020, 175, 105456. [Google Scholar] [CrossRef]
- Wen, C.; He, W.; Wu, W.; Liang, X.; Yang, J.; Nong, H.; Lan, Z. Recognition of mulberry leaf diseases based on multi-scale residual network fusion SENet. PLoS ONE 2024, 19, e0298700. [Google Scholar]
- Xue, Z.; Xu, R.; Bai, D.; Lin, H. YOLO-tea: A tea disease detection model improved by YOLOv5. Forests 2023, 14, 415. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]
- Li, Y.; Sun, S.; Zhang, C.; Yang, G.; Ye, Q. One-stage disease detection method for maize leaf based on multi-scale feature fusion. Appl. Sci. 2022, 12, 7960. [Google Scholar] [CrossRef]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Nie, X.; Wang, L.; Ding, H.; Xu, M. Strawberry verticillium wilt detection network based on multi-task learning and attention. IEEE Access 2019, 7, 170003–170011. [Google Scholar] [CrossRef]
- Dwivedi, R.; Dey, S.; Chakraborty, C.; Tiwari, S. Grape disease detection network based on multi-task learning and attention features. IEEE Sens. J. 2021, 21, 17573–17580. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature pyramid networks for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Zheng, Z.; Wang, P.; Liu, W.; Li, J.; Ye, R.; Ren, D. Distance-IoU loss: Faster and better learning for bounding box regression. In Proceedings of the AAAI Conference on Artificial Intelligence, New York Hilton Midtown, New York, NY, USA, 7–12 February 2020. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional Block Attention Module. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Yang, L.; Zhang, R.Y.; Li, L.; Xie, X. Simam: A simple, parameter-free attention module for convolutional neural networks. In Proceedings of the 38th International Conference on Machine Learning, Virtual, 18–24 July 2021. [Google Scholar]
- Zhang, X.; Liu, C.; Yang, D.; Song, T.; Ye, Y.; Li, K.; Song, Y. Rfaconv: Innovating spatital attention and standard convolutional operation. arXiv 2023, arXiv:2304.03198. [Google Scholar]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. arXiv 2024, arXiv:2402.13616. [Google Scholar]
- Wang, J.; Xu, C.; Yang, W.; Yu, L. A normalized Gaussian Wasserstein distance for tiny object detection. arXiv 2021, arXiv:2110.13389. [Google Scholar]
- Lin, T.Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal loss for dense object detection. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Zhao, Y.; Lv, W.; Xu, S.; Wei, J.; Wang, G.; Dang, Q.; Liu, Y.; Chen, J. Detrs beat yolos on real-time object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 17–21 June 2024. [Google Scholar]
- Wan, D.; Lu, R.; Shen, S.; Xu, T.; Lang, X.; Ren, Z. Mixed local channel attention for object detection. Eng. Appl. Artif. Intell. 2023, 123, 106442. [Google Scholar] [CrossRef]
- Ouyang, D.; He, S.; Zhang, G.; Luo, M.; Guo, H.; Zhan, J.; Huang, Z. Efficient multi-scale attention module with cross-spatial learning. In Proceedings of the ICASSP 2023—2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Rhodes Island, Greece, 4–10 June 2023. [Google Scholar]
- Lau, K.W.; Po, L.M.; Rehman, Y.A.U. Large separable kernel attention: Rethinking the large kernel attention design in cnn. Expert Syst. Appl. 2024, 236, 121352. [Google Scholar] [CrossRef]
- Lan, Y.; Sun, B.; Zhang, L.; Zhao, D. Identifying diseases and pests in ginger leaf under natural scenes using improved YOLOv5s. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2024, 40, 210–246. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types | Characteristics | Origin and Geographical Location |
|---|---|---|
| Brown spot | The pathogen is Septogleum mori Bri et Cav, brown spots of varying shapes and sizes on both sides of the leaves. | |
| Powdery mildew | The pathogen is Pbllactinia moricola (P. Henn.) Homma, a layer of white powdery mildew spots often appears on the surface of the diseased leaves. | Mulberry gardens in Mirganj, Bagha, Rajshahi, and Vodra, Rajshahi, in Rajshahi city, Bangladesh |
| Sooty leaf spot | The pathogen is Sirosporium mori (H. & P. Syb.) M. B. Ellis, which initially manifests as small coal dust-like black spots. In this study, it is referred to as sooty leaf spot. |
| Model | Precision (%) | Recall (%) | mAP50 (%) | mAP50:95 (%) | Model Size (MB) | GFLOPs |
|---|---|---|---|---|---|---|
| YOLOv8-RFMD | 92.6 | 89.5 | 94.3 | 67.8 | 5.45 | 7.8 |
| YOLOv8n | 90.1 | 84.8 | 91.4 | 63.5 | 5.98 | 8.1 |
| YOLOv7-tiny | 90.8 | 88.1 | 92.2 | 56.1 | 11.7 | 13.2 |
| YOLOv5s | 90.1 | 85.1 | 91.6 | 61.8 | 5.04 | 7.1 |
| Faster R-CNN | 79.4 | 83.2 | 86.4 | 59.5 | 314 | 954 |
| SSD | 59.1 | 57.3 | 60.7 | 43.5 | 60.3 | 162 |
| RetinaNet | 64.2 | 61.7 | 64.5 | 46.3 | 338 | 150 |
| YOLOv9-S | 91.8 | 88.6 | 93.7 | 67.4 | 19.4 | 27.3 |
| RT-DETR-R18 | 92.5 | 89.1 | 94.0 | 67.5 | 77.2 | 62.4 |
| Attention | Precision (%) | Recall (%) | mAP50 (%) | mAP50:95 (%) | Model Size (MB) | GFLOPs |
|---|---|---|---|---|---|---|
| MDFA | 92.6 | 89.5 | 94.3 | 67.8 | 5.45 | 7.8 |
| MLCA | 91.6 | 88.6 | 93.8 | 66.6 | 5.46 | 7.8 |
| EMA | 92.4 | 87.8 | 93.6 | 66.8 | 5.49 | 7.8 |
| LSKA | 92.5 | 88.8 | 93.9 | 66.9 | 5.60 | 7.8 |
| SE | 92.3 | 88.3 | 93.8 | 66.1 | 5.47 | 7.8 |
| ECA | 92.4 | 88.0 | 93.6 | 66.7 | 5.45 | 7.8 |
| CBAM | 91.7 | 88.8 | 93.8 | 67.0 | 5.49 | 7.8 |
| Test | MDFA | RFCA Conv | ADown | NWD Loss | Precision (%) | Recall (%) | mAP50 (%) | mAP50:95 (%) | Model Size (MB) | GFLOPs |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | - | - | - | - | 90.1 | 84.8 | 91.4 | 63.5 | 5.98 | 8.1 |
| 2 | ✓ | - | - | - | 90.7 | 86.3 | 92.4 | 64.3 | 5.99 | 8.1 |
| 3 | - | ✓ | - | - | 90 | 86.5 | 92.4 | 64.9 | 6.22 | 8.5 |
| 4 | ✓ | ✓ | - | - | 90.5 | 86.2 | 92.6 | 65.4 | 6.23 | 8.5 |
| 5 | - | - | ✓ | - | 90.4 | 86.2 | 92.3 | 64.9 | 5.20 | 7.4 |
| 6 | - | - | - | ✓ | 91.4 | 86.2 | 92.4 | 63.9 | 5.98 | 8.1 |
| 7 | ✓ | ✓ | ✓ | ✓ | 92.6 | 89.5 | 94.3 | 67.8 | 5.45 | 7.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Yuan, C.; Liu, Q.; Liu, H.; Qiu, X.; Zhao, M. Detection of Mulberry Leaf Diseases in Natural Environments Based on Improved YOLOv8. Forests 2024, 15, 1188. https://doi.org/10.3390/f15071188
Zhang M, Yuan C, Liu Q, Liu H, Qiu X, Zhao M. Detection of Mulberry Leaf Diseases in Natural Environments Based on Improved YOLOv8. Forests. 2024; 15(7):1188. https://doi.org/10.3390/f15071188
Chicago/Turabian StyleZhang, Ming, Chang Yuan, Qinghua Liu, Hongrui Liu, Xiulin Qiu, and Mengdi Zhao. 2024. "Detection of Mulberry Leaf Diseases in Natural Environments Based on Improved YOLOv8" Forests 15, no. 7: 1188. https://doi.org/10.3390/f15071188
APA StyleZhang, M., Yuan, C., Liu, Q., Liu, H., Qiu, X., & Zhao, M. (2024). Detection of Mulberry Leaf Diseases in Natural Environments Based on Improved YOLOv8. Forests, 15(7), 1188. https://doi.org/10.3390/f15071188