
Application of Unmanned Aerial Vehicle and Airborne Light Detection and Ranging Technologies to Identifying Terrain Obstacles and Designing Access Solutions for the Interior Parts of Forest Stands



Abstract
:1. Introduction
2. Materials and Methods
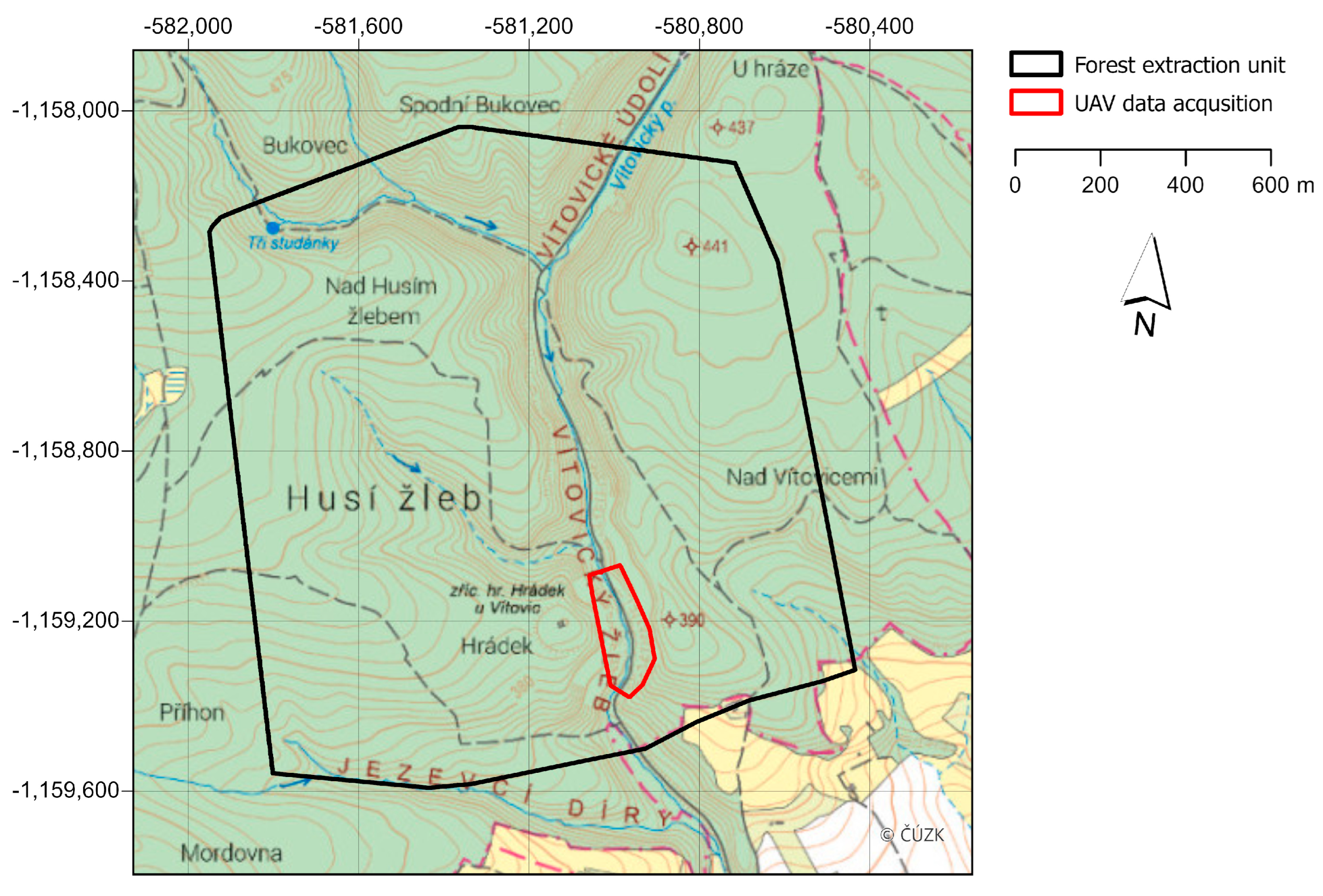
2.1. Data Collection
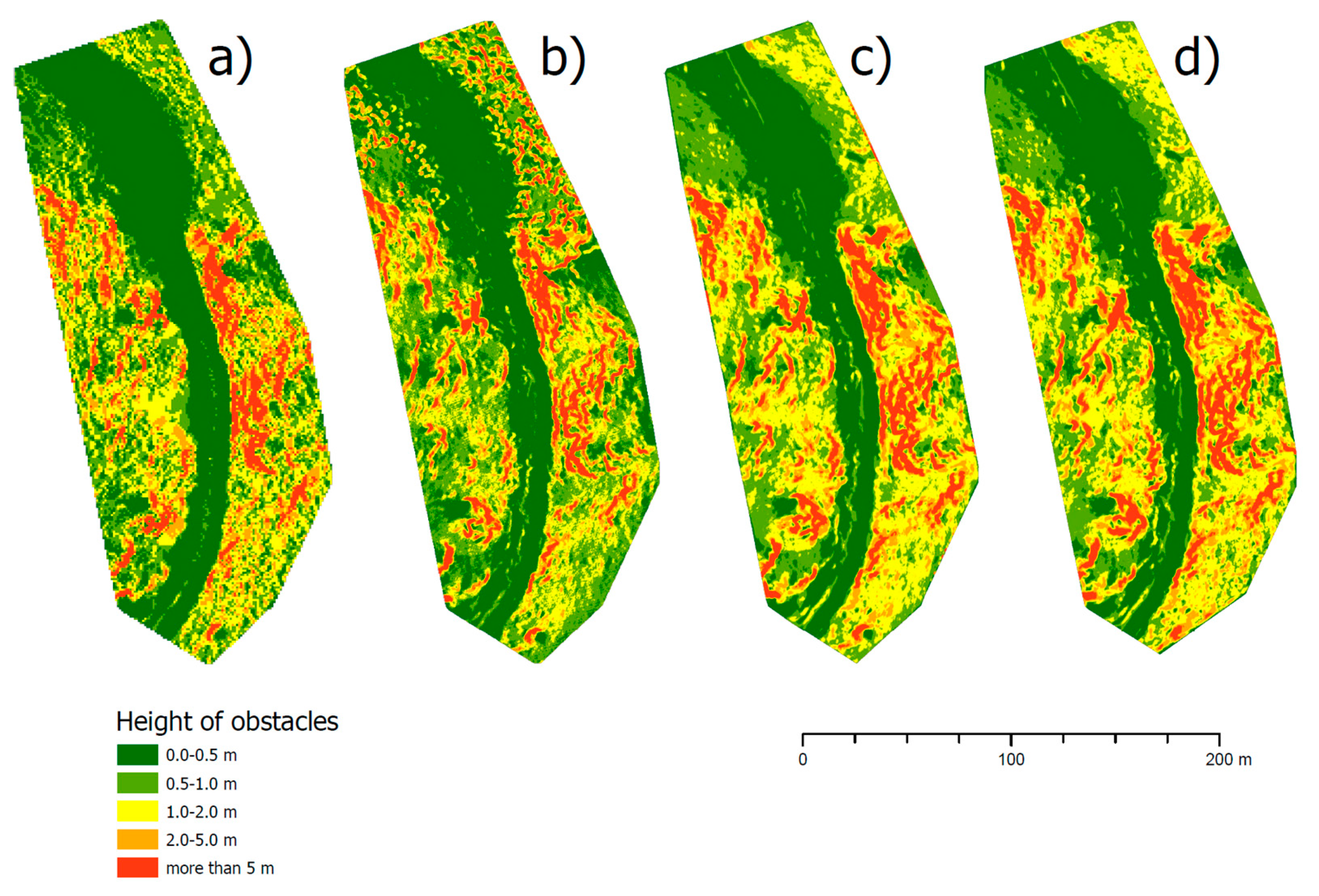
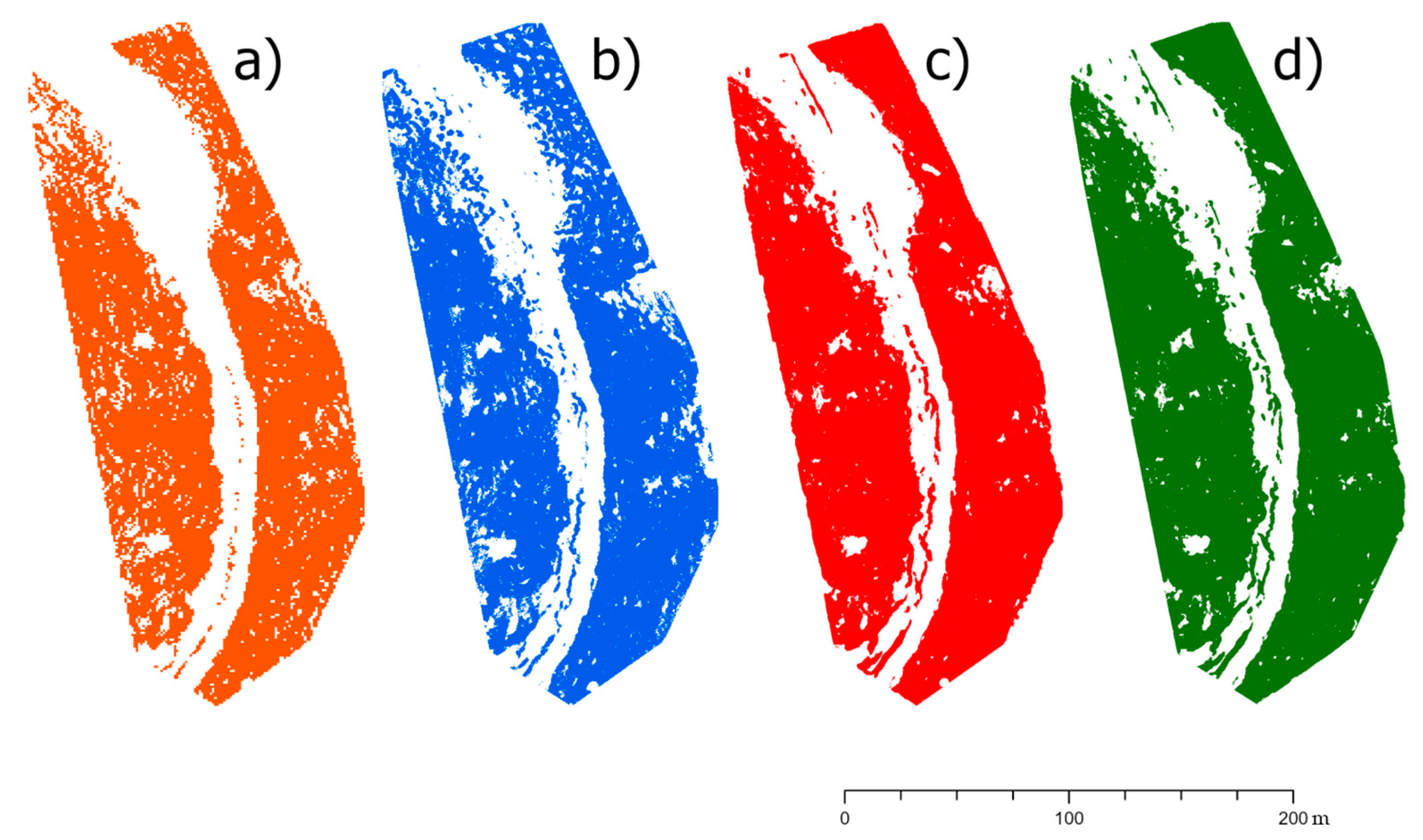
2.2. DTM Accuracy in Identifying Terrain Obstacles
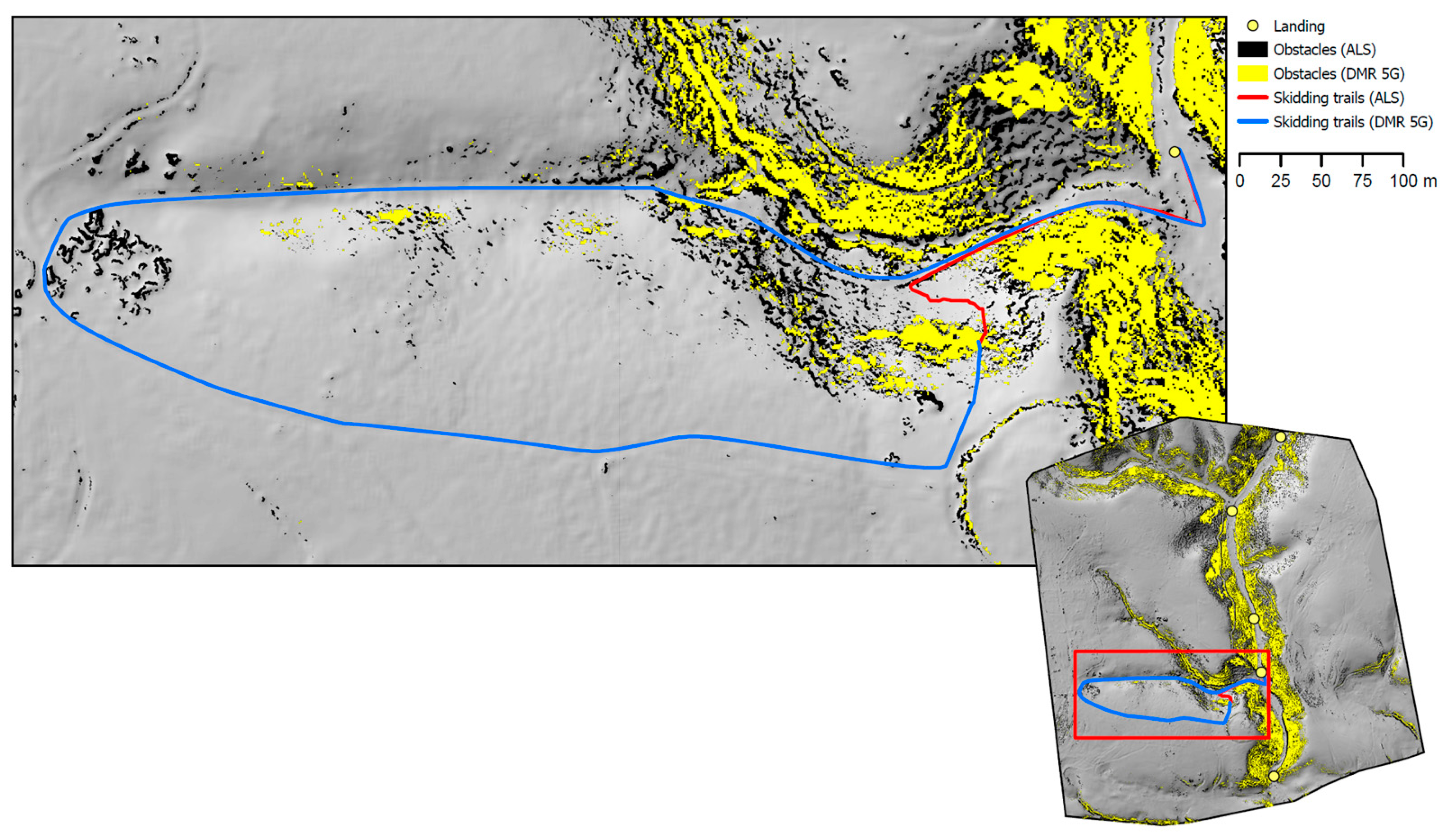
2.3. Accessing Interior Parts of Forest Stands
3. Results
3.1. Evaluating DTM Accuracy in Identifying Terrain Obstacles
3.2. Proposal for Accessing Interior Parts of Forest Stands
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Macků, J.; Popelka, J.; Simanov, V. Terénní klasifikace z pohledu ekologizace výrobních procesů v lesním hospodářství. Sborník TU Zvolen 1992, 156–161. [Google Scholar]
- Macků, J. Optimalizace těžebně-dopravních technologií. ÚHÚL 2005, 36, 547–555. [Google Scholar]
- Kühmaier, M.; Stampfer, K. Development of a Multi-Attribute Spatial Decision Support System in Selecting Timber Harvesting Systems. Croat. J. For. Eng. 2010, 31, 75–88. [Google Scholar]
- Bont, L.; Heinimann, H.; Church, R. Concurrent optimization of harvesting and road network layouts under steep terrain. Ann. Oper. Res. 2015, 232, 41–64. [Google Scholar] [CrossRef]
- Miyajima, R.H.; Simões, D.; Fenner, P.T.; Batistela, G.C. The impact of felling method, bunch size, slope degree and skidding area on productivity and costs of skidding in a eucalyptus plantation. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2021, 42, 381–390. [Google Scholar] [CrossRef]
- Kulak, D. Effectiveness of branch mats in soil protection on skidding trails during timber forwarding. Sylwan 2023, 167, 03. [Google Scholar]
- Krč, J.; Boštjan, K. PredictingWood Skidding Direction on Steep Terrain by DEM and Forest Road Network Extension. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2008, 29, 177–188. [Google Scholar]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Najafi, A.; Sobhani, H.; Saeed, A.; Makhdom, M.; Mohajer, M.M. Planning and Assessment of Alternative Forest Road and Skidding Networks. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2008, 29, 63–73. [Google Scholar]
- Petković, V.; Marčeta, D.; Ljubojević, D.; Kuburić, J. Determination of average skidding distance using GIS. Nova Meh. šumarstva: Časopis Za Teor. I Praksu šumarskoga Inženjerstva 2017, 38, 33–42. [Google Scholar]
- Simões, D.; da Silva, R.B.G.; Miyajima, R.H.; Avelino, L.T.; Barreiros, R.M. Impact of Skidding and Slope on Grapple Skidder Productivity and Costs: A Monte Carlo Simulation in Eucalyptus Plantations. Forests 2024, 15, 1890. [Google Scholar] [CrossRef]
- Đuka, A.; Poršinsky, T.; Vusić, D. DTM models to enhance planning of timber harvesting. Glas. Sumar. Fak. 2015, 35–44. [Google Scholar] [CrossRef]
- Kim, J.; Hong, I. Evaluation of the Usability of UAV LiDAR for Analysis of Karst (Doline) Terrain Morphology. Sensors 2024, 24, 7062. [Google Scholar] [CrossRef] [PubMed]
- Gumus, S.; Turk, Y. A new skid trail pattern design for farm tractors using linear programing and geographical information systems. Forests 2016, 7, 306. [Google Scholar] [CrossRef]
- Betlem, P.; Birchall, T.; Lord, G.; Oldfield, S.; Nakken, L.; Ogata, K. High-resolution digital outcrop model of the faults, fractures, and stratigraphy of the Agardhfjellet Formation cap rock shales at Konusdalen West, central Spitsbergen. Earth Syst. Sci. Data 2024, 16, 985–1006. [Google Scholar] [CrossRef]
- Salvini, R.; Mastrorocco, G.; Esposito, G.; Di Bartolo, S.; Coggan, J.; Vanneschi, C. Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat. Hazards Earth Syst. Sci. 2018, 18, 287–302. [Google Scholar] [CrossRef]
- Kaufmann, V.; Seier, G.; Sulzer, W.; Wecht, M.; Liu, Q.; Lauk, G. Rock glacier monitoring using aerial photographs: Conventional vs. UAV-based mapping—A comparative study. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci.—ISPRS Archives. Int. Soc. Photogramm. Remote Sens. 2018, 42, 239–246. [Google Scholar] [CrossRef]
- Jovančević, S.D.; Peranić, J.; Ružić, I.; Arbanas, Ž. Analysis of a historical landslide in the Rječina River Valley, Croatia. Geoenviron. Disasters 2016, 3, 1–9. [Google Scholar] [CrossRef]
- Oniga, V.E.; Loghin, A.M.; Macovei, M.; Lazar, A.A.; Boroianu, B.; Sestras, P. Enhancing LiDAR-UAS Derived Digital Terrain Models with Hierarchic Robust and Volume-Based Filtering Approaches for Precision Topographic Mapping. Remote Sens. 2023, 16, 78. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komarek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Lidmila, M.; Kolář, V.; Křemen, T. Vegetation Filtering of a Steep Rugged Terrain: The Performance of Standard Algorithms and a Newly Proposed Workflow on an Example of a Railway Ledge. Remote Sens. 2021, 13, 3050. [Google Scholar] [CrossRef]
- Doneus, M.; Mandlburger, G.; Doneus, N. Archaeological ground point filtering of airborne laser scan derived point-clouds in a difficult mediterranean environment. J. Comput. Appl. Archaeol. 2020, 3, 92–108. [Google Scholar] [CrossRef]
- Wilkes, P.; Jones, S.D.; Suarez, L.; Mellor, A.; Woodgate, W.; Soto-Berelov, M.; Skidmore, A.K. Mapping forest canopy height across large areas by upscaling ALS estimates with freely available satellite data. Remote Sens. 2015, 7, 12563–12587. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Toth, B. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2015, 47, 60–68. [Google Scholar] [CrossRef]
- Blistan, P.; Kovanič, Ľ.; Patera, M.; Hurčík, T. Evaluation quality parameters of DEM generated with low-cost UAV photogrammetry and Structure-from-Motion (SfM) approach for topographic surveying of small areas. Acta Montan. Slov. 2019, 24, 198–212. [Google Scholar]
- Santos, F.A.; Souza, M.C.D.; Zuquette, L.V.; Angulo, R.J.; Rosa, M.L.C.D.C.; Talamini, A.A.; Figueiredo, C.A. Inventory of natural processes with nautical charts, real-time kinematic global navigation satellite systems (RTK-GNSS), and unmanned aerial vehicle (UAV), Trindade Island, Brazil. Braz. J. Geol. 2022, 52, e20220007. [Google Scholar] [CrossRef]
- Risbøl, O.; Gustavsen, L. LiDAR from drones employed for mapping archaeology—Potential, benefits and challenges. Archaeol. Prospect. 2018, 25, 329–338. [Google Scholar] [CrossRef]
- Szeliski, R. Structure from Motion, 3rd ed.; Springer: London, UK, 2011; pp. 154–196. [Google Scholar] [CrossRef]
- Kanade, T.; Morris, D.D. Factorization methods for structure from motion. Philos. Trans. R. Soc. Lond. A Math. Phys. Eng. Sci. 1998, 356, 1153–1173. [Google Scholar] [CrossRef]
- Musselman, K.N.; Margulis, S.A.; Molotch, N.P. Estimation of solar direct beam transmittance of conifer canopies from airborne LiDAR. Remote Sens. Environ. 2013, 136, 402–415. [Google Scholar] [CrossRef]
- Wieser, M.; Hollaus, M.; Mandlburger, G.; Glira, P.; Pfeifer, N. ULS LiDAR supported analyses of laser beam penetration from different ALS systems into vegetation. ISPRS Ann. Photogramm. Remote Sens. Spatial Inf. Sci. 2016, 3, 233–239. [Google Scholar] [CrossRef]
- Žabota, B.; Berger, F.; Kobal, M. The potential of UAV-acquired photogrammetric and LiDAR-point clouds for obtaining rock dimensions as input parameters for modeling rockfall runout zones. Drones 2023, 7, 104. [Google Scholar] [CrossRef]
- Zapico, I.; Laronne, J.B.; Sánchez Castillo, L.; Martín Duque, J.F. Improvement of workflow for topographic surveys in long highwalls of open pit mines with an unmanned aerial vehicle and structure from motion. Remote Sens. 2021, 13, 3353. [Google Scholar] [CrossRef]
- Csatáriné Szabó, Z.; Mikita, T.; Négyesi, G.; Varga, O.; Burai, P.; Takács-Szilágyi, L.; Szabo, S. Uncertainty and overfitting in fluvial landform classification using laser scanned data and machine learning: A comparison of pixel and object-based approaches. Remote Sens. 2020, 12, 3652. [Google Scholar] [CrossRef]
- Rashidi, P.; Rastiveis, H. Ground filtering LiDAR data based on multi-scale analysis of height difference threshold. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2017, 42, 225–229. [Google Scholar]
- Meng, X.; Wang, L.; Silván-Cárdenas, J.L.; Currit, N. A multi-directional ground filtering algorithm for airborne LIDAR. ISPRS J. Photogramm. Remote Sens. 2009, 64, 117–124. [Google Scholar] [CrossRef]
- Fernandez-Carrillo, A.; Patocka, Z.; Dobrovolný, L.; Franco-Nieto, A.; Revilla-Romero, B. Monitoring bark beetle forest damage in Central Europe. A remote sensing approach validated with field data. Remote Sens. 2020, 12, 3634. [Google Scholar] [CrossRef]
- Krok, G.; Kraszewski, B.; Stereńczak, K. Application of terrestrial laser scanning in forest inventory—An overview of selected issues. For. Res. Pap. 2020, 81, 175–194. [Google Scholar] [CrossRef]
- Novo, A.; Patočka, Z.; Cibulka, M.; Vahalík, P. Use of UAV in inventory of an old orchard—Case study Světlá. Eur. J. Hortic. Sci. 2023, 88, 1–9. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Li, B.; Sun, W.; Li, Y. An adaptive filtering algorithm of multilevel resolution point cloud. Surv. Rev. 2020, 53, 1–12. [Google Scholar] [CrossRef]
- Pentek, T.; Poršinsky, T.; Šušnjar, M.; Stankić, I.; Nevečerel, H.; Šporčić, M. Environmentally sound harvesting technologies in commercial forests in the area of Northern Velebit–functional terrain classification. Period. Biol. 2008, 110, 127–135. [Google Scholar]
- Shan, J.; Toth, C.K. (Eds.) Topographic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Picchio, R.; Pignatti, G.; Marchi, E.; Latterini, F.; Benanchi, M.; Foderi, C.; Venanzi, R.; Verani, S. The application of two approaches using GIS technology implementation in forest road network planning in an Italian mountain setting. Forests 2018, 9, 277. [Google Scholar] [CrossRef]
- Froehlich, H.A.; Aulerich, D.E.; Curtis, R. Designing Skid Trail Systems to Reduce Soil Impacts from Tractive Logging Machines; Forest Research Laboratory School of Forestry Oregon State University: Corvallis, OR, USA, 1981. [Google Scholar]
- Marcu, M.V.; Borz, S.A. Effect of Trail Condition, Slope, and Direction of Extraction on Forwarding Performance: Insights from a Controlled Comparative Study. Forests 2024, 15, 1790. [Google Scholar] [CrossRef]
- Lovrincevic, M.; Papa, I.; Popovic, M.; Janes, D.; Porsinsky, T.; Pentek, T.; Duka, A. Methods of Rut Depth Measurements on Forwarder Trails in Lowland Forest. Forests 2024, 15, 1021. [Google Scholar] [CrossRef]
- Contreras, M.A.; Parrott, D.L.; Chung, W. Designing skid-trail networks to reduce skidding cost and soil disturbance for ground-based timber harvesting operations. For. Sci. 2016, 62, 48–58. [Google Scholar] [CrossRef]
- Grube, G.; Talbot, B.; Grigolato, S. Automated Terrain Roughness Assessment Using Remotely Sensed Data. Int. J. For. Eng. 2025, 36, 1–16. [Google Scholar] [CrossRef]
- Hanák, K. Zpřístupňování Lesa: Vybrané Statě I, 1st ed.; Mendelova Zemědělská a Lesnická Univerzita: Brno, Czech Republic, 2002; ISBN 80-7157-639-5. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | DTM Resolution (m) | Ground Point Density (m2) |
|---|---|---|
| ULS | 0.1 | 449 |
| RGB UAV | 0.1 | 442 |
| ALS | 0.5 | 7 |
| DMR 5G | 1 | 1 |
| 1 | Skidding Tracks ZABAGED |
| 50 | Slope up to 30% |
| 100 | Slope 30%–50% |
| 1000 | Slope 50%–70% |
| 10,000 | Slope over 70% |
| Barriers | Obstacles up to 5 m distance |
| Data Source | ULS | RGB UAV | ALS | DMR 5G | |
|---|---|---|---|---|---|
| ULS | Mean | - | −0.06 | −0.20 | −0.71 |
| - | Std. deviation | - | 0.71 | 1.09 | 1.31 |
| - | RMSE | - | 0.71 | 1.11 | 1.49 |
| RGB UAV | Mean | 0.06 | - | −0.14 | −0.78 |
| - | Std. deviation | 0.71 | - | 1.04 | 1.03 |
| - | RMSE | 0.20 | - | 1.05 | 1.29 |
| ALS | Mean | 0.20 | 0.14 | - | 0.39 |
| - | Std. deviation | 1.09 | 1.04 | - | 0.98 |
| - | RMSE | 1.11 | 1.05 | - | 1.05 |
| DMR 5G | Mean | 0.71 | 0.78 | −0.39 | - |
| - | Std. deviation | 1.31 | 1.03 | 0.98 | - |
| - | RMSE | 1.49 | 1.29 | 1.05 | - |
| Data Source | Area (m2) | Area | The Highest Rocky Obstacle Detected (m) |
|---|---|---|---|
| ULS | 20,784 | 72.2 | 13.2 |
| RGB UAV | 21,086 | 73.2 | 13.6 |
| ALS | 18,923 | 65.7 | 16.7 |
| DMR 5G | 18,352 | 63.7 | 9.8 |
| Data Source | Sum (m) | Max (m) |
|---|---|---|
| ALS | 32,605 | 252 |
| DMR 5G | 33,284 | 249 |
| Data Source | Sum (m) | Sum Diff. (m) | Min Diff. (m) | Max Diff. (m) | Mean Diff. (m) |
|---|---|---|---|---|---|
| ALS | 615.089 | 3.083 | −1.155 | 378 | 4 |
| DMR 5G | 618.172 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrůza, P.; Mikita, T.; Žižlavská, N. Application of Unmanned Aerial Vehicle and Airborne Light Detection and Ranging Technologies to Identifying Terrain Obstacles and Designing Access Solutions for the Interior Parts of Forest Stands. Forests 2025, 16, 729. https://doi.org/10.3390/f16050729
Hrůza P, Mikita T, Žižlavská N. Application of Unmanned Aerial Vehicle and Airborne Light Detection and Ranging Technologies to Identifying Terrain Obstacles and Designing Access Solutions for the Interior Parts of Forest Stands. Forests. 2025; 16(5):729. https://doi.org/10.3390/f16050729
Chicago/Turabian StyleHrůza, Petr, Tomáš Mikita, and Nikola Žižlavská. 2025. "Application of Unmanned Aerial Vehicle and Airborne Light Detection and Ranging Technologies to Identifying Terrain Obstacles and Designing Access Solutions for the Interior Parts of Forest Stands" Forests 16, no. 5: 729. https://doi.org/10.3390/f16050729
APA StyleHrůza, P., Mikita, T., & Žižlavská, N. (2025). Application of Unmanned Aerial Vehicle and Airborne Light Detection and Ranging Technologies to Identifying Terrain Obstacles and Designing Access Solutions for the Interior Parts of Forest Stands. Forests, 16(5), 729. https://doi.org/10.3390/f16050729