
Operator Exposure to Vibration and Noise During Steep Terrain Harvesting



Abstract
1. Introduction
2. Materials and Methods
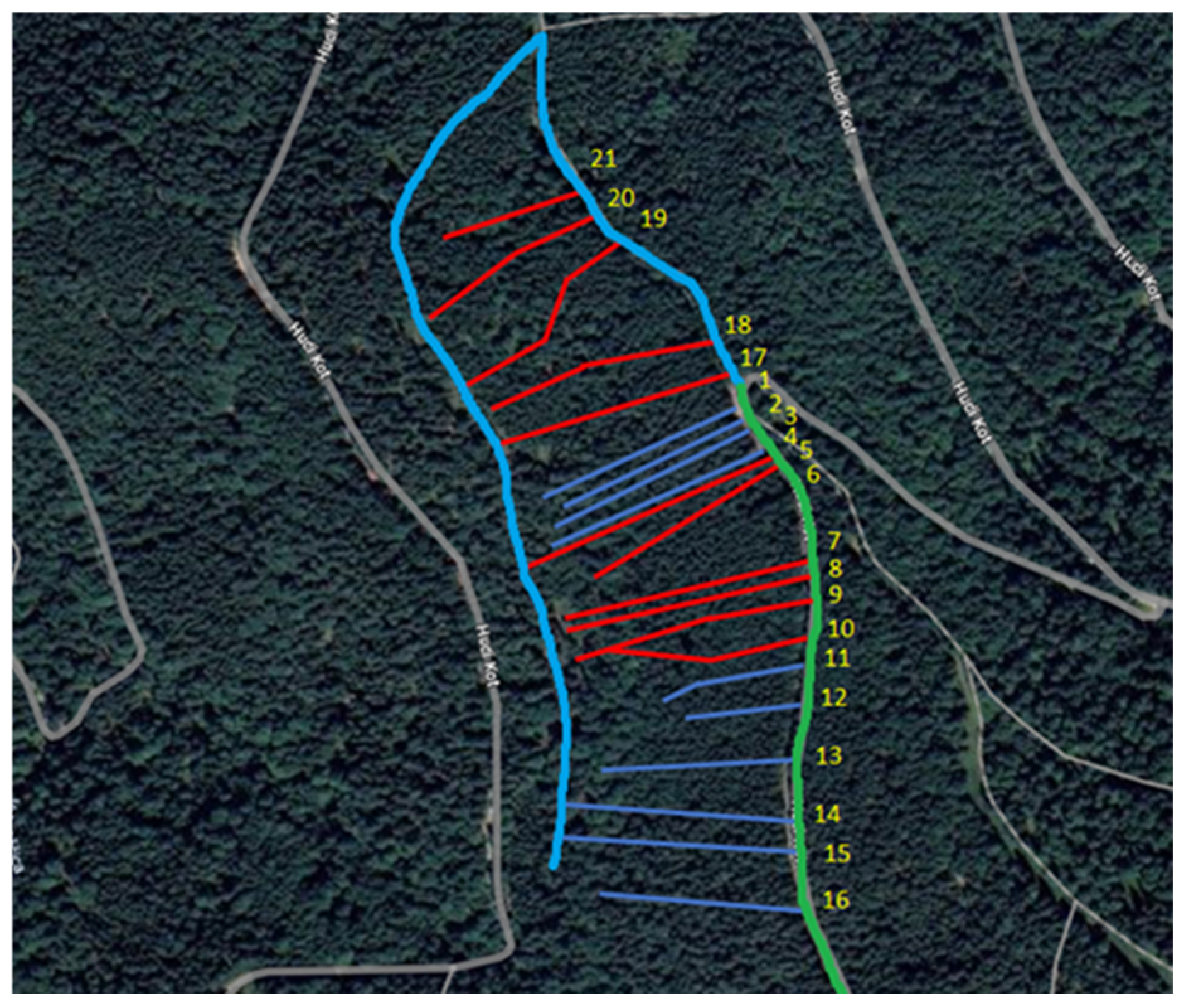
2.1. Object Description
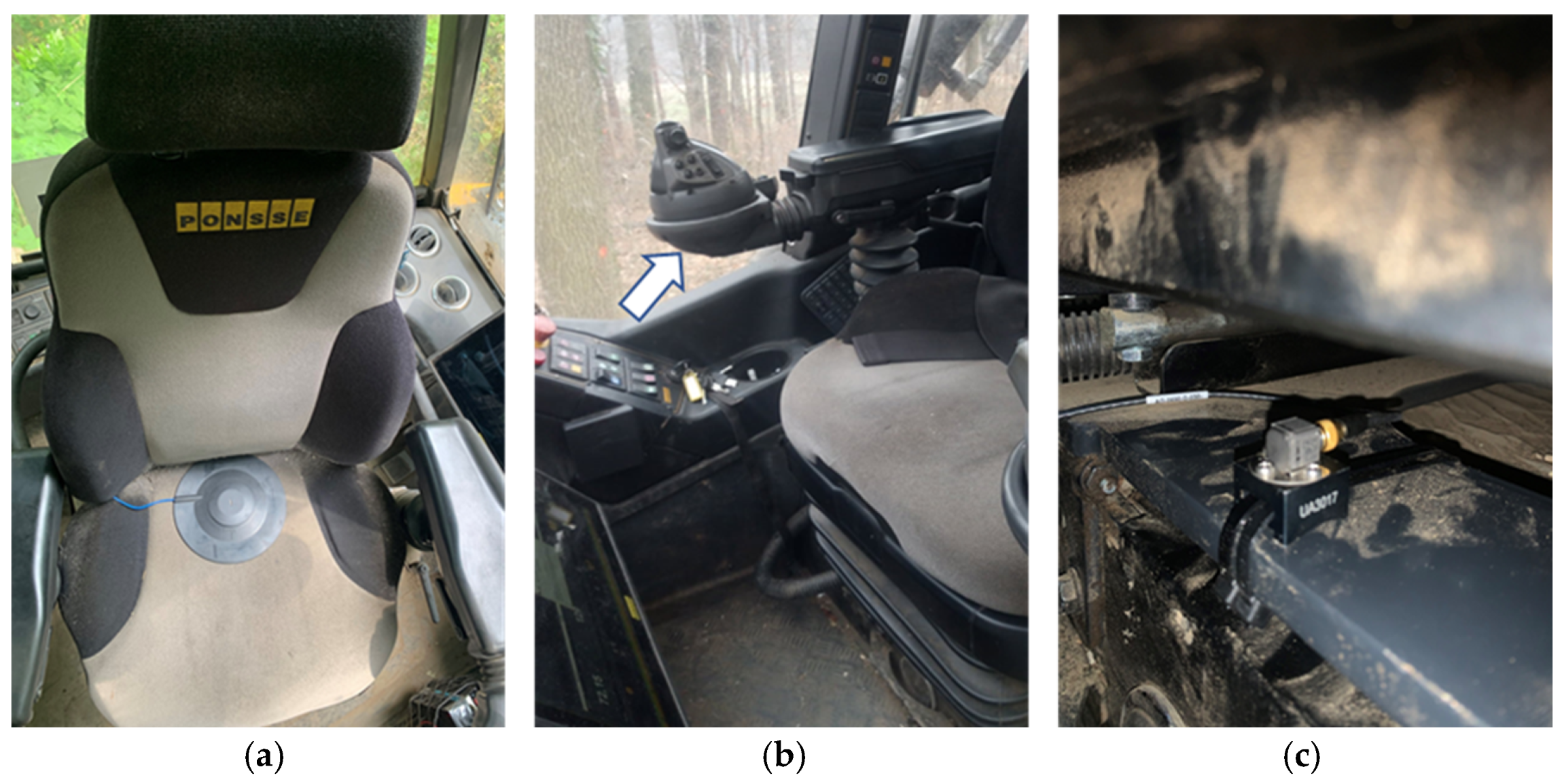
2.2. Measurement Methods and Instruments
2.3. Data Processing, Indicators and Statistical Analyses
3. Results
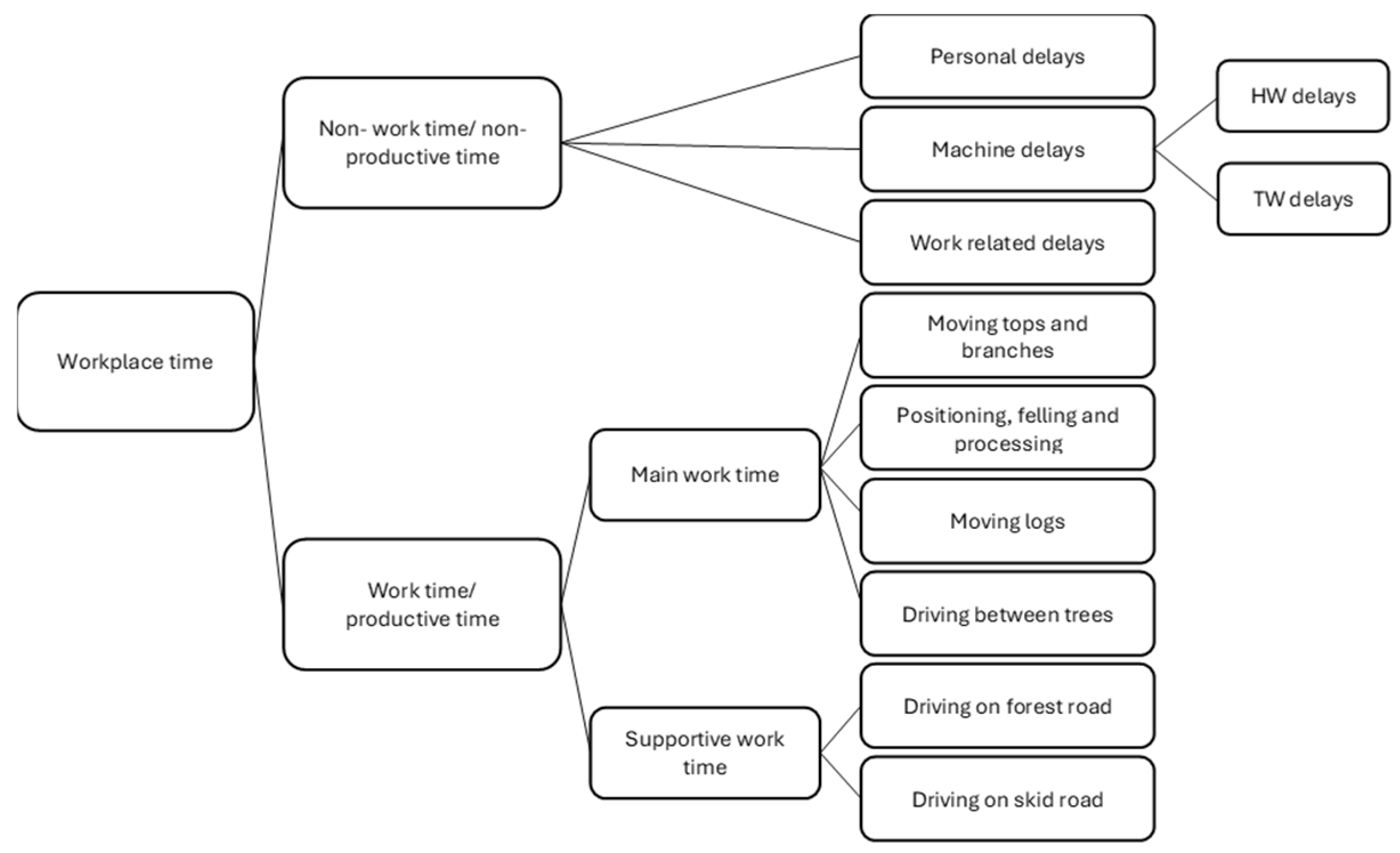
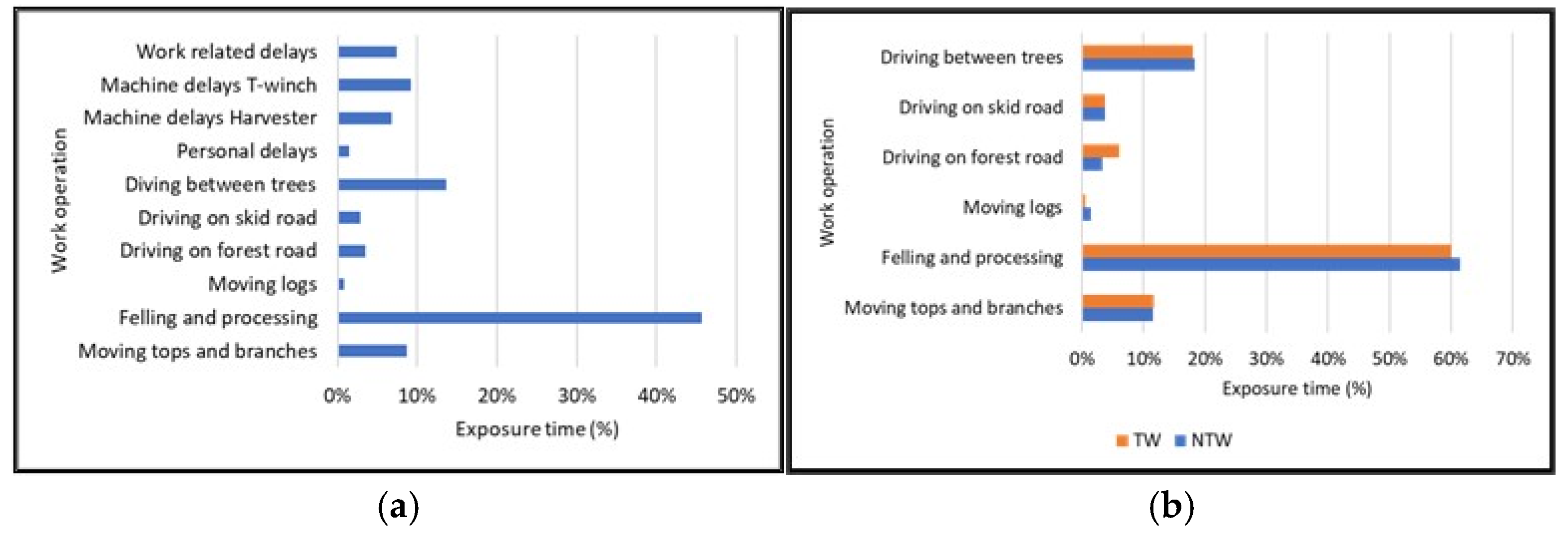
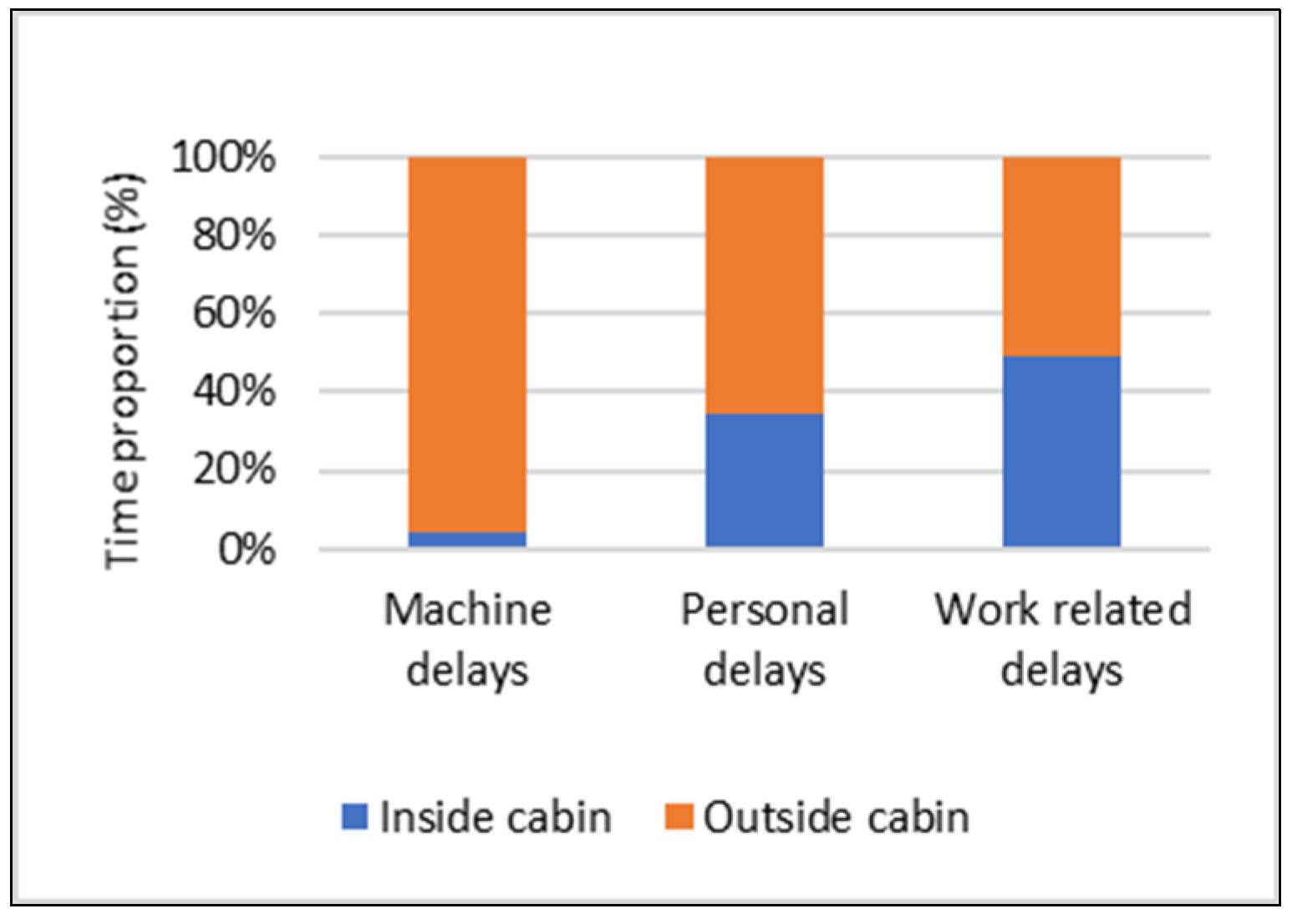
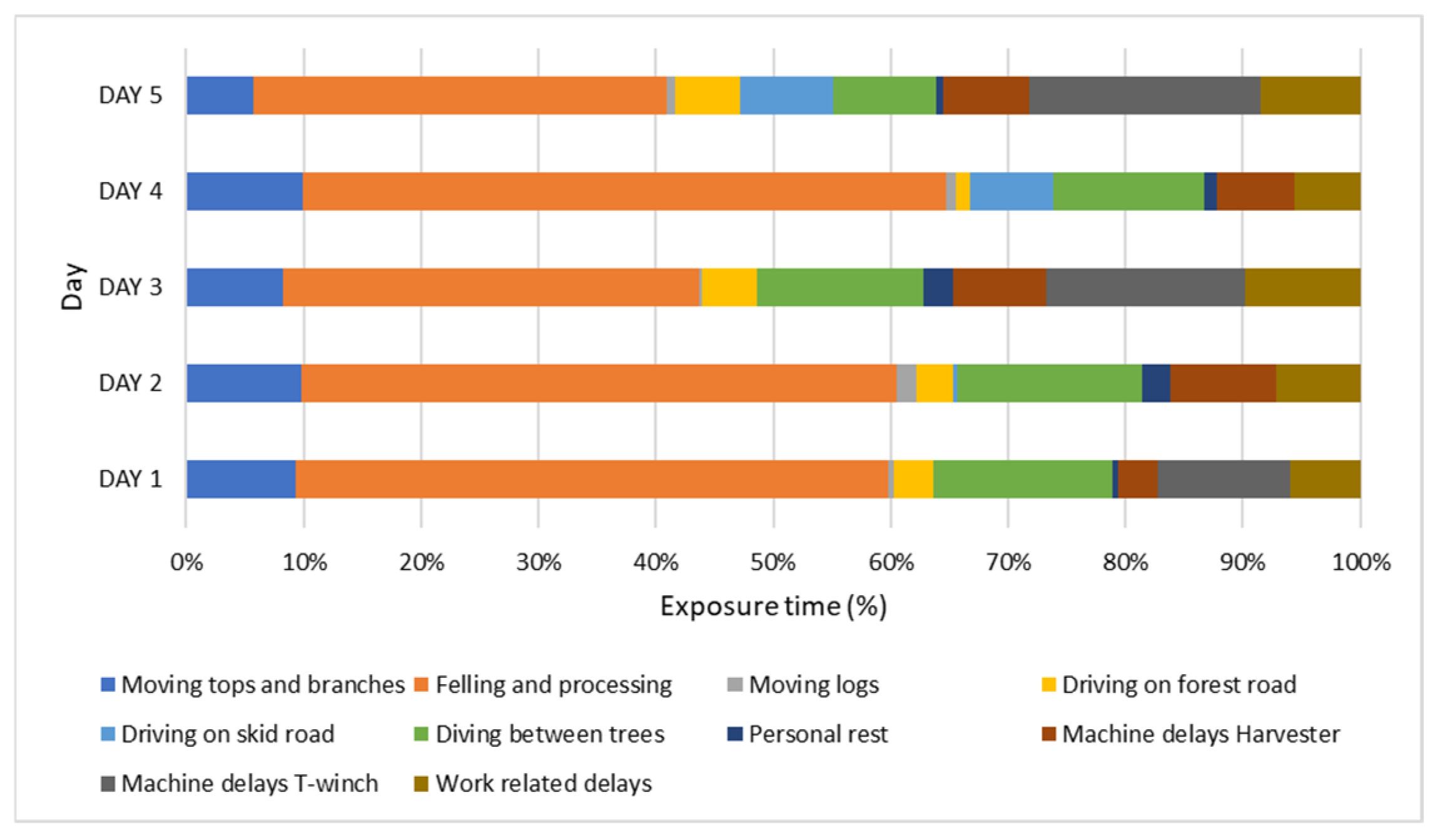
3.1. Exposure Time Structure
3.2. Vibrations and Noise Exposure of the Operator
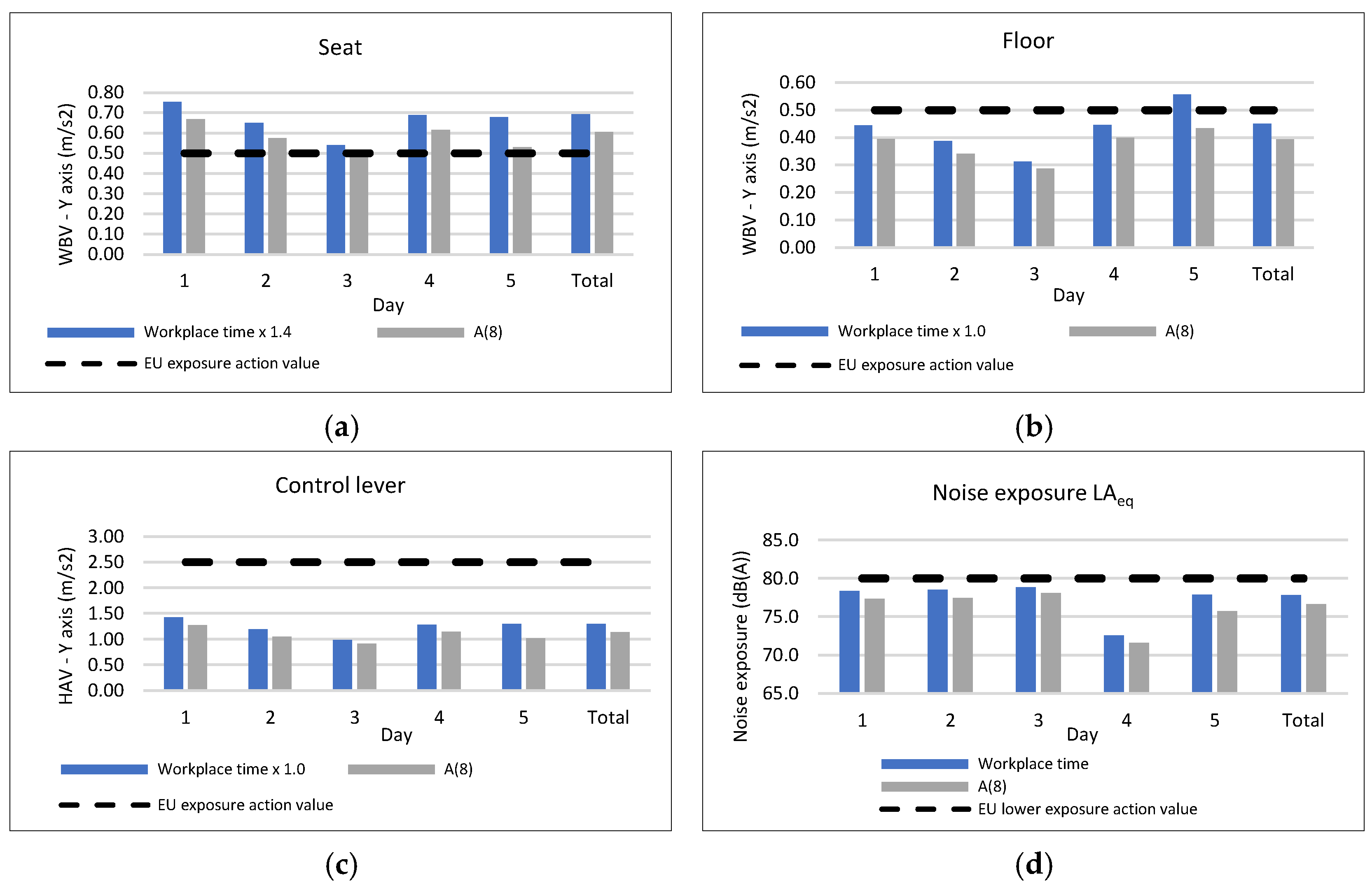
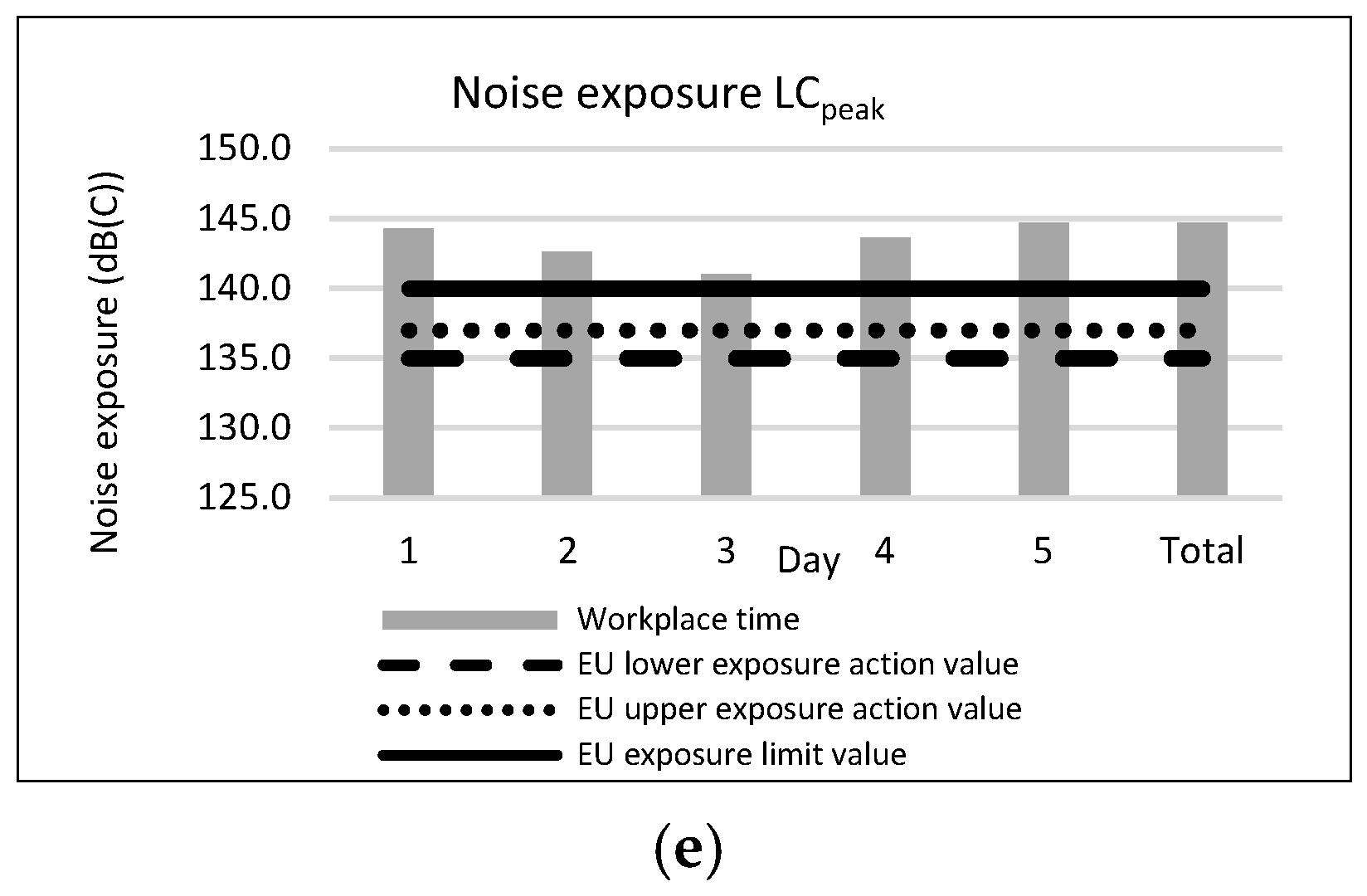
3.2.1. Average and Daily Exposure of the Operator
3.2.2. Impact of Harvesting System, DBH, and Tree Species on WBV, HAV, and Noise Exposure
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| WBV | Whole-body vibrations |
| HAV | Hand–arm vibrations |
| TW | Winch-assisted harvesting |
| NTW | Harvesting without winch assistance (conventional harvesting) |
| LAeq | Equivalent continuous sound level |
| LCpeak | Peak sound level |
| DBH | Diameter at breast height |
| VTV | Vibration total value |
| TS | Tree species |
References
- Lundbäck, M.; Häggström, C.; Nordfjell, T. Worldwide trends in methods for harvesting and extracting industrial roundwood. Int. J. For. Eng. 2021, 32, 202–215. [Google Scholar] [CrossRef]
- Heinimann, H.R. Forest operations under mountainous conditions. In Forests in Sustainable Mountain Development: A State of Knowledge Report for 2000; Price, M.F., Butt, N., Eds.; Task Force on Forests in Sustainable Mountain Development; CABI Publishing: Wallingford, UK, 2000; pp. 224–234. [Google Scholar] [CrossRef]
- Adams, J.D.; Visser, R.J.M.; Prisley, S.P. Modelling steep terrain harvesting risks using GIS. In Proceedings of the Austro 2003: High Tech Forest Operations for Mountainous Terrain, Schlägl, Austria, 5–9 October 2003. [Google Scholar]
- Asikainen, A.; Leskinen, L.A.; Pasanen, K.; Väätäinen, K.; Anttila, P.; Tahvanainen, T. The Present and Future of the Forestry Machinery Sector. Finnish Forest Research Institute. 2009. Available online: https://jukuri.luke.fi/handle/10024/504111 (accessed on 5 February 2025).
- Prem, J.; Bauer, H. Austrian annual timber harvesting report for 2019. In German: Holzeinschlagsmeldung für das Kalenderjahr 2019; Federal Ministry of Agriculture, Regions and Tourism: Wien, Austria, 2020; 12 p. [Google Scholar]
- Pucher, C.; Erber, G.; Hasenauer, H. Europe’s Potential Wood Supply by Harvesting System. Forests 2023, 14, 398. [Google Scholar] [CrossRef]
- Šporčić, M.; Landekić, M.; Šušnjar, M.; Pandur, Z.; Bačić, M.; Mijoč, D. Shortage of Labour Force in Forestry of Bosnia and Herzegovina–Forestry Experts’ Opinions on Recruiting and Retaining Forestry Workers. Croat. J. For. Eng. 2024, 45, 183–197. [Google Scholar] [CrossRef]
- Enache, A.; Kühmaier, M.; Visser, R.; Stampfer, K. Forestry operations in the European mountains: A study of current practices and efficiency gaps. Scand. J. For. Res. 2016, 31, 412–427. [Google Scholar] [CrossRef]
- Holzfeind, T.; Visser, R.; Chung, W.; Holzleitner, F.; Erber, G. Development and Benefits of Winch-Assist Harvesting. Curr. For. Rep. 2020, 6, 201–209. [Google Scholar] [CrossRef]
- Visser, R.M.; Spinelli, R. Benefits and Limitations of Winch-Assist Technology for Skidding Operations. Forests 2023, 14, 296. [Google Scholar] [CrossRef]
- FISC. Winch-Assisted Harvesting, Best Practice guide. Part A, the Winch-Assist System. 2022. Available online: https://www.safetree.nz/resources/winch-assisted-harvesting-bpg (accessed on 11 March 2025).
- Mckenzie, D.W.; Richardson, B.Y. Feasibility study of self-contained tether cable system for operating equipment on slopes of 20 to 75%. J. Terramech. 1978, 15, 113–127. [Google Scholar] [CrossRef]
- Sessions, J.; Leschinsky, B.; Chung, W.; Boston, K.; Wimer, J. Theoretical stability and traction of steep slope tethered feller-bunchers. For. Sci. 2017, 63, 192–200. [Google Scholar] [CrossRef]
- Cavalli, R.; Amishev, D. Steep Terrain Forest Operations–Challenges, Technology Development, Current Implementation, and Future Opportunities. Int. J. For. Eng. 2019, 30, 175–181. [Google Scholar] [CrossRef]
- Schönauer, M.; Holzfeind, T.; Hoffmann, S.; Holzleitner, F.; Hinte, B.; Jaeger, D. Effect of a Traction-Assist Winch on Wheel Slippage and Machine Induced Soil Disturbance in Flat Terrain. Int. J. For. Eng. 2021, 32, 1–11. [Google Scholar] [CrossRef]
- Tynkkynen, M. Assessing Harvester Operators’ Mental Workload Using Continuous ECG Recording Technique. Int. J. Cogn. Ergon. 2001, 5, 213–219. [Google Scholar] [CrossRef]
- Berger, C. Mental stress on harvester operators. High Tech Forest Operations for Mountainous Terrain. In Proceedings of the Formec Conference 2003, Schlaegl, Austria, 5–9 October 2003; Available online: https://www.formec.org/images/proceedings/2003/22_berger.pdf (accessed on 6 February 2025).
- Szewczyk, G.; Spinelli, R.; Magagnotti, N.; Tylek, P.; Sowa, J.M.; Rudy, P.; Gaj-Gielarowiec, D. The Mental Workload of Harvester Operators Working in Steep Terrain Conditions. Silva Fenn. 2020, 54, 10355. [Google Scholar] [CrossRef]
- Szewczyk, G.; Spinelli, R.; Magagnotti, N.; Mitka, B.; Tylek, P.; Kulak, D.; Adamski, K. Perception of the Harvester Operator’s Working Environment in Windthrow Stands. Forests 2021, 12, 168. [Google Scholar] [CrossRef]
- Spinelli, R.; Magagnotti, N.; Labelle, E.R. The Effect of New Silvicultural Trends on Mental Workload of Harvester Operators. Croat. J. For. Eng. 2020, 41, 177–190. [Google Scholar] [CrossRef]
- Poje, A.; Grigolato, S.; Potočnik, I. Operator Exposure to Noise and Whole-Body Vibration in a Fully Mechanised CTL Forest Harvesting System in Karst Terrain. Croat. J. For. Eng. 2019, 40, 139–250. [Google Scholar]
- Schettino, S.; Minette, L.J.; Caçador, S.S.; Reboleto, I.D. Assessment of Occupational Vibration on Tire × Track Harvesters in Forest Harvesting. In Proceedings of the 20th Congress of the International Ergonomics Association, IEA 2018, Florence, Italy, 26–30 August 2018. [Google Scholar] [CrossRef]
- Camargo, D.A.; Munis, R.A.; Simões, D. Investigation of Exposure to Occupational Noise among Forestry Machine Operators: A Case Study in Brazil. Forests 2021, 12, 299. [Google Scholar] [CrossRef]
- Lima, C.; Lima, R.C.; Souza, A.; Minette, L.; Schettino, S.; Vieira, M.; Nascimento, G. Occupational Noise and Vibration Assessments in Forest Harvesting Equipment in North-Eastern Brazil. J. Exp. Agric. Int. 2019, 40, 1–9. [Google Scholar] [CrossRef]
- Jankovský, M.; Messingerová, V.; Ferenčík, M.; Allman, M. Objective and Subjective Assessment of Selected Factors of the Work Environment of Forest Harvesters and Forwarders. J. For. Sci. 2016, 62, 8–16. [Google Scholar] [CrossRef]
- Smidt, M.F.; Lynch, S.; Schall, M.; Sesek, R. Speed and whole body vibration in a sample of grapple skidders from the US South. In Proceedings of the 2022 ASABE Annual International Meeting, Houston, TX, USA, 17–20 July 2022; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2022. [Google Scholar] [CrossRef]
- Jack, R.J.; Oliver, M.; Dickey, J.P.; Cation, S.; Hayward, G.; Lee-Shee, N. Six-Degree-of-Freedom Whole-Body Vibration Exposure Levels during Routine Skidder Operations. Ergonomics 2010, 53, 696–715. [Google Scholar] [CrossRef]
- Šušnjar, M.; Pandur, Z.; Zečić, Z.; Kopseak, H.; Bačić, M. Skidder Operator Vibration Exposure. In Proceedings of the 8th International Ergonomics Conference, Ergonomics 2020, Advances in Intelligent Systems and Computing, Zagreb, Croatia, 2–5 December 2020. [Google Scholar] [CrossRef]
- Pregledovalnik Podatkov o Gozdovih. Available online: https://prostor.zgs.gov.si/pregledovalnik/ (accessed on 11 November 2024).
- Ponsse oyj. Available online: https://www.ponsse.com/en/web/guest/products/harvesters/product/-/p/scorpion#/ (accessed on 17 March 2025).
- Ecoforst. Available online: https://www.ecoforst.at/t-winch-10-3/ (accessed on 10 February 2025).
- Bruel&Kjaer. Available online: https://www.bksv.com/media/doc/bp2106.pdf (accessed on 7 February 2025).
- ISO 2631-1:1997; Mechanical Vibration and Shock–Evaluation of Human Exposure to Whole Body Vibration—Part 1: General Requirements. ISO: Geneva, Switzerland, 1997.
- ISO 5349-1:2001; Mechanical Vibration—Measurement and Evaluation of Human Exposure to Hand-Transmitted Vibration—Part 1: General Requirements. ISO: Geneva, Switzerland, 2001.
- ISO 9612:2009; Acoustics–Determination of Occupational Noise Exposure–Engineering Method. ISO: Geneva, Switzerland, 2009.
- Skogforsk. Available online: https://www.skogforsk.se/english/projects/stanford/ (accessed on 15 December 2024).
- Björheden, R.; Apel, K.; Shiba, M.; Thompson, M.A. IUFRO Forest Work Study Nomenclature; Swedish University of Agricultural Science, Department of Operational Efficiency: Garpenberg, Sweden, 1995; 16 p. [Google Scholar]
- UL, RS. 2010. Available online: https://pisrs.si/pregledPredpisa?id=URED5360 (accessed on 17 February 2025).
- European Commission: Directorate-General for Employment. Social Affairs and Inclusion. Non-Binding Guide to Good Practice with a View to Implementation of Directive 2002/44/EC on the Minimum Health and Safety Requirements Regarding the Exposure of Workers to the Risks Arising from Physical Agents (Vibrations); Publications Office: Luxembourg, 2005. [Google Scholar] [CrossRef]
- EU 2002: Directive 2002/44/EC of the European Parliament and of the Council of 25 June 2002 on the minimum Health and Safety Requirements Regarding the Exposure of Workers to The Risks Arising from Physical Agents (Vibration). Official Journal of the European Communities, Brussels, Belgium. Available online: https://eur-lex.europa.eu/resource.html?uri=cellar:546a09c0-3ad1-4c07-bcd5-9c3dae6b1668.0004.02/DOC_1&format=PDF%20 (accessed on 17 February 2025).
- EU 2003: Directive 2003/10/EC of the European Parliament and of the Council of 6 February 2003 on the Minimum Health and Safety Requirements Regarding the Exposure of Workers to the Risks Arising from Physical Agents (Noise). Official Journal of the European Communities, Brussels, Belgium. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32003L0010 (accessed on 17 February 2025).
- Šušnjar, M.; Pandur, Z.; Bačić, M.; Halilović, V.; Nevečerel, H.; Lepoglavec, K.; Kopseak, H. Analysis of Skidder Fuel Consumption by Work Operations During Timber Extraction in Thinning of Even-Aged Forest on Mountainous Terrain: A Case Study. Sustainability 2024, 16, 11240. [Google Scholar] [CrossRef]
- Santos, D.W.F.D.N.; Valente, D.S.M.; Fernandes, H.C.; Souza, A.P.D.; Minette, L.J. Influence of pump pressure and engine speed on ergonomic parameters of forwarder operators. Rev. Árvore 2020, 44, e4425. [Google Scholar] [CrossRef]
- Tiemessen, I.J.; Hulshof, C.T.J.; Frings-Dresen, M.H.W. An overview of strategies to reduce whole-body vibration exposure on drivers: A systematic review. Int. J. Ind. Ergon. 2007, 37, 245–256. [Google Scholar] [CrossRef]
- Rehn, B.; Lundström, R.; Nilsson, L.; Liljelind, I.; Järvholm, B. Variation in Exposure to Whole-Body Vibration for Operators of Forwarder Vehicles—Aspects on Measurement Strategies and Prevention. Int. J. Ind. Ergon. 2005, 35, 831–842. [Google Scholar] [CrossRef]
- Obi, O.F.; Visser, R. Including Exogenous Factors in the Evaluation of Harvesting Crew technical efficiency using a multi-step data envelopment analysis procedure. Croat. J. For. Eng. 2018, 39, 153–162. [Google Scholar]
- Camargo, D.; Munis, R.; Batistela, G.; Simões, D. Exposure to Occupational Noise: Machine Operators of Full Tree System in Brazil. Croat. J. For. Eng. 2022, 43, 397–402. [Google Scholar] [CrossRef]
- Poje, A.; Potočnik, I.; Danilović, M.; Antonić, S. A Case Study of the Impact of Skidding Distance on Tractor Operator Exposure to Noise. Balt. For. 2016, 22, 357–364. [Google Scholar]
- McNeel, J.F.; Rutherford, D. Modelling Harvester-Forwarder System Performance in a Selection Harvest. J. For. Eng. 1994, 6, 7–14. [Google Scholar] [CrossRef]
- Javůrek, P.; Dvořák, J. Evaluation of Total Time Consumption in Harvester Technology Deployment in Conditions of the Forest Sector of the Czech Republic. J. For. Sci. 2018, 64, 33–42. [Google Scholar] [CrossRef]
- Väyrynen, S. Occupational accidents in the maintenance of heavy forest machinery. J. Occup. Accid. 1982, 4, 175. [Google Scholar] [CrossRef]
- Holzfeind, T.; Stampfer, K.; Holzleitner, F. Productivity, Setup Time and Costs of a Winch-Assisted Forwarder. J. For. Res. 2018, 23, 196–203. [Google Scholar] [CrossRef]
- Dvorak, J.; Gluschkov, S.; Markoff, I. Performance of the small tracked harvesters in spruce stands. For. Sci. 2007, 77, 85. [Google Scholar]
- Sláma, D.; Mergl, V.; Pavlíková, E.A. Analysis of the Heart Rate of Operators of Forwarding Machines during Work Activities. Forests 2023, 14, 1348. [Google Scholar] [CrossRef]
- Olivera, F.A.; Visser, R. Using the harvester on-board computer capability to move towards precision forestry. N. Z. J. For. 2016, 60, 3–7. [Google Scholar] [CrossRef]
- Gerasimov, Y.; Sokolov, A. Ergonomic characterization of harvesting work in Karelia. Croat. J. For. Eng. 2009, 30, 159–170. [Google Scholar]
- Staněk, L.; Mergl, V. Whole Body Vibrations during Fully Mechanised Logging. Forests 2022, 13, 630. [Google Scholar] [CrossRef]
- Sherwin, L.M.; Owende, P.M.O.; Kanali, C.L.; Lyons, J.; Ward, S.M. Influence of Forest Machine Function on Operator Exposure to Whole-Body Vibration in a Cut-to-Length Timber Harvester. Ergonomics 2004, 47, 1145–1159. [Google Scholar] [CrossRef]
- Poršinsky, T.; Bumber, Z.; Pandur, Z.; Đuka, A.; Ursić, B.; Lovrinčević, M. Dimensional and mass characteristics of forwarders. Šumarski List (Online) 2022, 146, 387–401. [Google Scholar] [CrossRef]
- Butkus, R.; Vasiliauskas, G.; Zinkevicius, R. Operator Whole-Body Vibration Exposure of Wheeled Forwarder with Bogie Tracks. In Proceedings of the 19th International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 20 May 2020; Available online: https://www.iitf.lbtu.lv/conference/proceedings2020/Papers/TF407.pdf (accessed on 25 January 2025).
- Martins, A.B.; Lopes, E.d.S.; Fiedler, N.C.; Oliveira, F.M.d.; Pagnussat, M.B. The Whole-Body Vibration in Operation of Wheeled and Tracked Harvester IN PINUS Thinning. Int. J. Ind. Ergon. 2020, 80, 103006. [Google Scholar] [CrossRef]
- Kim, J.H.; Dennerlein, J.T.; Johnson, P.W. The Effect of a Multi-Axis Suspension on Whole Body Vibration Exposures and Physical Stress in the Neck and Low Back in Agricultural Tractor Applications. Appl. Ergon. 2018, 68, 80–89. [Google Scholar] [CrossRef]
- Goglia, V.; Gospodarić, Z.; Košutić, S.; Filipović, D. Hand-Transmitted Vibration from the Steering Wheel to Drivers of a Small Four-Wheel Drive Tractor. Appl. Ergon. 2003, 34, 45–49. [Google Scholar] [CrossRef]
- Bačić, M.; Landekić, M.; Šušnjar, M.; Šporčić, M.; Pandur, Z. Vibration Levels and Daily Vibration Exposure While Using Different Tools in a Forest Cleaning. Cent. Eur. For. J. 2023, 69, 49–58. [Google Scholar] [CrossRef]
- Xu, X.S.; Dong, R.G.; Welcome, D.E.; Warren, C.; McDowell, T.W.; Wu, J.Z. Vibrations Transmitted from Human Hands to Upper Arm, Shoulder, Back, Neck, and Head. Int. J. Ind. Ergon. 2017, 62, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Gellerstedt, S. Operation of the Single-Grip Harvester: Motor-Sensory and Cognitive Work. Int. J. For. Eng. 2002, 13, 35–47. [Google Scholar] [CrossRef]
- Paini, A.; Da, E.; Lopes, E.; Souza, A.; Oliveira, F.; Rodrigues, C.; Paini, A. Repetitive motion and postural analysis of machine operators in mechanized wood harvesting operations. Cerne 2019, 25, 214–220. [Google Scholar] [CrossRef]
- Messingerová, V.; Martinusová, L.; Slaník, M. Ergonomic Parameters of the Work of Integrated Technologies at Timber Harvesting. Croat. J. For. Eng. 2005, 26, 79–84. [Google Scholar]
- Poje, A.; Potočnik, I.; Marenče, J. Impact of woodcutters ax and felling wedge to vibration exposure. Proceedings of conference paper 7. In Proceedings of the Međunarodno Savjetovanje Šumarsko Inženjerstvo Jugoistočne Europe-Stanje i Izazovi, Zalesina, Croatia, 14–16 September 2022. [Google Scholar]
- Arpinar-Avsar, P.; Park, J.; Zatsiorsky, V.M.; Latash, M.L. Effects of Muscle Vibration on Multi-Finger Interaction and Coordination. Exp. Brain Res. 2013, 229, 103–111. [Google Scholar] [CrossRef]
- Visser, R.; Berkett, H. Effect of Terrain Steepness on Machine Slope When Harvesting. Int. J. For. Eng. 2015, 26, 1–9. [Google Scholar] [CrossRef]
- NZDOL. Approved Code of Practice for Safety and Health in Forest Operations; Department of Labour: Wellington, New Zealand, 1999; 135 p., ISBN 0-4777-03622-8. [Google Scholar]
- Visser, R.; Stampfer, K. Expanding Ground-based Harvesting onto Steep Terrain: A Review. Croat. J. For. Eng. 2015, 36, 321–331. [Google Scholar]
- FISC-Safetree. Available online: https://www.datocms-assets.com/97172/1686788458-winch-assisted-harvesting-bpg-chapt-3-winches.pdf (accessed on 5 February 2025).
- Ackerman, S.; Bekker, J.; Astrup, R.; Talbot, B. Understanding the Influence of Tree Size Distribution on the CTL Harvesting Productivity of Two Different Size Harvesting Machines. Eur. J. For. Res. 2024, 143, 1199–1211. [Google Scholar] [CrossRef]
- Mederski, P.S.; Schweier, J.; Đuka, A.; Tsioras, P.; Bont, L.G.; Bembenek, M. Mechanised Harvesting of Broadleaved Tree Species in Europe. Curr. For. Rep. 2022, 8, 1–19. [Google Scholar] [CrossRef]
- Olivera, A.; Visser, R.; Acuna, M.; Morgenroth, J. Automatic GNSS-Enabled Harvester Data Collection as a Tool to Evaluate Factors Affecting Harvester Productivity in a Eucalyptus spp. Harvest. Oper. Uruguay. Int. J. For. Eng. 2016, 27, 15–28. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Harvesting Trail | Harvesting System | Number of Trees (n) | Volume (m3) | Trail Distance (m) | Trail Slope (%) | Skid Road Distance (m) | Forest Road Distance (m) |
|---|---|---|---|---|---|---|---|---|
| 1 | 1 | TW | 91 | 35.2 | 120 | 45 | 0 | 17 |
| 2 | TW | 85 | 37.3 | 125 | 50 | 0 | 14 | |
| 3 | TW | 67 | 28.4 | 126 | 45 | 0 | 9 | |
| 4 | TW | 57 | 26.6 | 157 | 40 | 0 | 18 | |
| 5 | NTW | 42 | 21.8 | 136 | 35 | 0 | 55 | |
| Total | 342 | 149.3 | 133 | 43 | 0 | 113 | ||
| 2 | 6 | NTW | 57 | 26.5 | 135 | 30 | 0 | 50 |
| 7 | NTW | 84 | 41.0 | 115 | 32 | 0 | 43 | |
| 8 | NTW | 101 | 43.2 | 106 | 35 | 0 | 8 | |
| 9 | NTW | 78 | 35.6 | 92 | 35 | 0 | 22 | |
| 10 | NTW | 6 | 3.0 | 10 | 35 | 0 | 164 | |
| Total | 326 | 149.3 | 92 | 33 | 0 | 287 | ||
| 3 | 10 | NTW | 60 | 39.3 | 90 | 35 | 0 | 150 |
| 11 | TW | 60 | 294 | 80 | 40 | 0 | 15 | |
| 12 | TW | 47 | 24.9 | 139 | 45 | 0 | 20 | |
| 13 | TW | 66 | 23.9 | 88 | 45 | 0 | 202 | |
| Total | 233 | 93.6 | 103 | 42 | 0 | 387 | ||
| 4 | 14 | TW | 35 | 11.4 | 77 | 45 | 0 | 425 |
| 17 | NTW | 72 | 38.9 | 144 | 45 | 20 | 30 | |
| 18 | NTW | 36 | 19.2 | 137 | 40 | 16 | 0 | |
| 19 | NTW | 25 | 13.6 | 32 | 35 | 191 | 0 | |
| 20 | NTW | 68 | 23.9 | 143 | 15 | 22 | 0 | |
| 21 | NTW | 85 | 32.7 | 110 | 15 | 868 | 30 | |
| Total | 321 | 130.9 | 103 | 32 | 1117 | 485 | ||
| 5 | 13 | TW | 11 | 8.0 | 48 | 45 | 0 | 239 |
| 14 | TW | 46 | 20.5 | 132 | 45 | 623 | 259 | |
| 15 | TW | 63 | 29.0 | 144 | 50 | 610 | 265 | |
| 16 | TW | 100 | 65.0 | 133 | 50 | 620 | 65 | |
| Total | 220 | 155.2 | 113 | 48 | 1853 | 828 | ||
| 1–5 | Total | 1442 | 678.3 | 109 | 40 | 2971.8 | 2107 |
| Nr. of Equation | Equation | Variables |
|---|---|---|
| Equation (1) |
| |
| Equation (2) | ||
| Equation (3) | ||
| Equation (4) | ||
| Equation (5) | ||
| Equation (6) | ||
| Equation (7) | ||
| Equation (8) |
| Work Element | RT (min) (Inside Cabin/Total) | WBV Seat (Inside the Cabin/Total) 1 | WBV floor | HAV Control Lever | Noise (Inside the Cabin/Total) 1 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMS X (m/s2) | RMS Y (m/s2) | RMS Z (m/s2) | RMS X (m/s2) | RMS Y (m/s2) | RMS Z (m/s2) | VTV (m/s2) | Laeq | LCpeak | ||||
| Productive time | Support. work time | Driving on forest road | 63.2 | 0.70 | 0.77 | 0.69 | 0.49 | 0.69 | 0.83 | 2.14 | 70.5 | 135.4 |
| Driving on skid road | 51.8 | 0.73 | 0.87 | 0.66 | 0.63 | 0.84 | 0.84 | 2.08 | 69.0 | 114.0 | ||
| Total support. time | 115.0 | 0.71 | 0.81 | 0.68 | 0.54 | 0.75 | 0.83 | 2.12 | 69.8 | 135.4 | ||
| Main productive time | Moving tops and branches | 160.2 | 0.43 | 0.56 | 0.27 | 0.37 | 0.48 | 0.31 | 1.43 | 67.1 | 114.6 | |
| Felling and processing | 837.7 | 0.38 | 0.52 | 0.22 | 0.41 | 0.50 | 0.34 | 1.43 | 67.6 | 134.2 | ||
| Moving logs | 15.0 | 0.40 | 0.49 | 0.22 | 0.32 | 0.41 | 0.23 | 1.27 | 66.8 | 106.0 | ||
| Driving between trees | 249.8 | 0.51 | 0.60 | 0.48 | 0.38 | 0.49 | 0.39 | 1.38 | 68.0 | 134.4 | ||
| Total main productive time | 1262.7 | 0.42 | 0.54 | 0.30 | 0.40 | 0.49 | 0.35 | 1.42 | 67.6 | 134.4 | ||
| Total productive time | 1377.7 | 0.45 | 0.57 | 0.35 | 0.41 | 0.52 | 0.41 | 1.49 | 67.9 | 135.4 | ||
| Unproductive time | Machine delays | 11.2/ 1 | 0.23/ | 0.25/ | 0.21/ | 0.15/ | 0.21/ | 0.14/ | 0.78/ | 72.8/ | 135.8/ | |
| 293.8 | 0.04 | 0.05 | 0.04 | 0.03 | 0.04 | 0.03 | 0.15 | 84.8 | 144.7/ | |||
| Personal delays | 9.3/ | 0.20/ | 0.20/ | 0.25/ | 0.12/ | 0.15/ | 0.11/ | 0.71/ | 70.5/ | 133.8/ | ||
| 26.9 | 0.10 | 0.10 | 0.13 | 0.06 | 0.08 | 0.06 | 0.36 | 78.6 | 143.6 | |||
| Work-related delays | 66.6/ | 0.23/ | 0.26/ | 0.21/ | 0.17/ | 0.21/ | 0.17/ | 0.65/ | 72.3/ | 136.0/ | ||
| 135.4 | 0.15 | 0.17 | 0.13 | 0.11 | 0.14 | 0.11 | 0.42 | 78.2 | 144.5 | |||
| Total unproductive time | 87.1/ | 0.23/ | 0.26/ | 0.21/ | 0.16/ | 0.21/ | 0.16/ | 0.68/ | 72.2/ | 135.8/ | ||
| 456.1 | 0.09 | 0.10 | 0.08 | 0.06 | 0.08 | 0.06 | 0.26 | 83.5 | 144.7 | |||
| Workplace time | 1834 | 0.39 | 0.49 | 0.30 | 0.36 | 0.45 | 0.36 | 1.30 | 77.8 | 144.7 | ||
| Work Element | WBV Seat—RMS Y (m/s2) | WBV Floor—RMS Y (m/s2) | HAV Control Lever—RMS VTV (m/s2) | Noise—LAeq (dB(A)) | Noise—LCpeak (dB(C)) | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | |||
| Productive time | Supp. Work time | Driving on forest road | 0.72 | 0.62 | 0.82 | 0.85 | 0.83 | 0.61 | 0.53 | 0.71 | 0.70 | 0.81 | 1.97 | 1.75 | 2.14 | 2.00 | 2.45 | 74.0 | 69.3 | 69.7 | 69.6 | 70.1 | 144.2 | 132.8 | 133.4 | 109.4 | 130.5 |
| Driving on skid road | 0.50 | 1.23 | 0.86 | 0.45 | 0.90 | 0.85 | 0.97 | 2.95 | 2.06 | 66.9 | 68.8 | 69.2 | 103.3 | 114.0 | 112.0 | ||||||||||||
| Total supp. time | 0.72 | 0.60 | 0.82 | 0.96 | 0.85 | 0.61 | 0.52 | 0.71 | 0.76 | 0.83 | 1.97 | 1.66 | 2.14 | 2.29 | 2.22 | 74.0 | 69.0 | 69.7 | 68.9 | 69.6 | 144.2 | 132.8 | 133.4 | 114.0 | 130.5 | ||
| Main productive time | Moving tree tops and branches | 0.62 | 0.52 | 0.54 | 0.53 | 0.54 | 0.51 | 0.44 | 0.43 | 0.49 | 0.49 | 1.62 | 1.34 | 1.31 | 1.38 | 1.38 | 67.6 | 67.4 | 66.7 | 66.5 | 67.2 | 112.6 | 114.5 | 114.6 | 110.4 | 108.6 | |
| Felling and processing | 0.57 | 0.49 | 0.51 | 0.50 | 0.52 | 0.47 | 0.41 | 0.42 | 0.47 | 0.71 | 1.58 | 1.32 | 1.36 | 1.37 | 1.45 | 68.0 | 67.6 | 67.6 | 67.2 | 67.7 | 122.5 | 115.1 | 132.8 | 134.2 | 111.0 | ||
| Moving logs | 0.60 | 0.50 | 0.48 | 0.46 | 0.38 | 0.49 | 0.41 | 0.40 | 0.41 | 0.37 | 1.64 | 1.20 | 1.01 | 1.29 | 1.15 | 67.6 | 67.3 | 66.2 | 66.2 | 65.7 | 104.8 | 106.0 | 104.3 | 100.2 | 100.7 | ||
| Driving between trees | 0.68 | 0.56 | 0.58 | 0.59 | 0.52 | 0.54 | 0.45 | 0.46 | 0.51 | 0.48 | 1.59 | 1.22 | 1.42 | 1.31 | 1.23 | 68.3 | 67.8 | 68.9 | 66.7 | 68.2 | 120.0 | 122.3 | 134.4 | 109.8 | 131.7 | ||
| Total main productive time | 0.60 | 0.51 | 0.54 | 0.52 | 0.52 | 0.49 | 0.42 | 0.43 | 0.48 | 0.65 | 1.58 | 1.30 | 1.37 | 1.36 | 1.40 | 68.0 | 67.6 | 67.8 | 67.0 | 67.7 | 122.5 | 122.3 | 134.4 | 134.2 | 131.7 | ||
| Total prod. time | 0.60 | 0.51 | 0.55 | 0.54 | 0.60 | 0.50 | 0.43 | 0.45 | 0.49 | 0.69 | 1.60 | 1.31 | 1.42 | 1.40 | 1.61 | 68.5 | 67.7 | 68.0 | 67.3 | 68.2 | 144.2 | 132.8 | 134.4 | 134.2 | 131.7 | ||
| Unproductive time | Machine delays | 0.06 | 0.02 | 0.03 | 0.07 | 0.05 | 0.05 | 0.01 | 0.03 | 0.06 | 0.04 | 0.19 | 0.08 | 0.08 | 0.22 | 0.17 | 85.7 | 88.4 | 84.1 | 82.2 | 82.7 | 144.3 | 135.9 | 141.0 | 142.7 | 144.7 | |
| Personal delays | 0.25 | 0.09 | 0.04 | 0.18 | 0.21 | 0.06 | 0.03 | 0.13 | 0.96 | 0.30 | 0.15 | 0.50 | 0.00 | 71.5 | 75.4 | 80.0 | 79.6 | 80.4 | 109.7 | 142.6 | 121.7 | 143.6 | 143.3 | ||||
| Work-related delays | 0.18 | 0.19 | 0.12 | 0.18 | 0.18 | 0.15 | 0.15 | 0.09 | 0.15 | 0.14 | 0.44 | 0.45 | 0.28 | 0.44 | 0.48 | 81.5 | 75.4 | 77.7 | 74.2 | 78.8 | 144.2 | 141.7 | 134.3 | 143.4 | 143.8 | ||
| Total unproductive time | 0.11 | 0.12 | 0.06 | 0.12 | 0.09 | 0.10 | 0.10 | 0.05 | 0.10 | 0.08 | 0.31 | 0.30 | 0.15 | 0.33 | 0.28 | 84.8 | 85.7 | 83.1 | 80.0 | 82.0 | 144.3 | 142.6 | 141.0 | 143.6 | 144.7 | ||
| Total (min) | 379 | 373 | 406 | 384 | 292 | 379 | 373 | 406 | 384 | 292 | 379 | 373 | 406 | 384 | 292 | 379 | 373 | 406 | 384 | 292 | 379 | 373 | 406 | 384 | 292 | ||
| Work time (m/s2) | 0.55 | 0.47 | 0.41 | 0.50 | 0.43 | 0.45 | 0.39 | 0.33 | 0.46 | 0.50 | 1.45 | 1.20 | 1.04 | 1.31 | 1.16 | 79.6 | 79.2 | 82.9 | 74.2 | 69.5 | 144.3 | 142.6 | 141 | 143.6 | 144.7 | ||
| Har. System | Work Element | WBV Seat | WBV Floor | HAV Control Lever | Noise | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SS (n) | RMS X (m/s2) | RMS Y (m/s2) | RMS Z (m/s2) | RMS X (m/s2) | RMS Y (m/s2) | RMS Z (m/s2) | VTV (m/s2) | SS (n) | LAeq | LCpeak | |||||||||||
| Sum | Avg | Sd | Avg | Sd | Avg | Sd | Avg | Sd | Avg | Sd | Avg | Sd | Avg | Sd | Sum | Avg | Sd | Avg | Sd | ||
| TW | Moving tree tops and branches | 205 | 0.43 | 0.12 | 0.57 | 0.17 | 0.26 | 0.10 | 0.36 | 0.12 | 0.47 | 0.15 | 0.29 | 0.14 | 1.37 | 0.51 | 228 | 67.1 | 1.6 | 99.7 | 4.6 |
| Felling and processing | 582 | 0.37 | 0.08 | 0.52 | 0.12 | 0.21 | 0.06 | 0.34 | 0.29 | 0.46 | 0.27 | 0.25 | 0.29 | 1.41 | 0.42 | 644 | 67.6 | 1.5 | 100.4 | 4.2 | |
| Moving logs | 14 | 0.41 | 0.13 | 0.49 | 0.13 | 0.23 | 0.07 | 0.33 | 0.10 | 0.43 | 0.10 | 0.24 | 0.10 | 1.37 | 0.42 | 14 | 66.6 | 1.7 | 98.6 | 3.6 | |
| Driving between trees | 225 | 0.43 | 0.12 | 0.54 | 0.15 | 0.28 | 0.11 | 0.35 | 0.09 | 0.46 | 0.12 | 0.30 | 0.12 | 1.29 | 0.45 | 247 | 67.3 | 1.7 | 98.4 | 4.9 | |
| Total | 583 | 0.38 | 0.08 | 0.53 | 0.11 | 0.23 | 0.06 | 0.35 | 0.28 | 0.47 | 0.25 | 0.27 | 0.28 | 1.41 | 0.38 | 644 | 67.5 | 1.5 | 99.81 | 4.5 | |
| NTW | Moving tree tops and branches | 188 | 0.41 | 0.11 | 0.53 | 0.15 | 0.25 | 0.08 | 0.36 | 0.15 | 0.46 | 0.16 | 0.29 | 0.17 | 1.28 | 0.44 | 258 | 66.7 | 1.7 | 99.8 | 4.2 |
| Felling and processing | 594 | 0.37 | 0.08 | 0.49 | 0.11 | 0.19 | 0.06 | 0.31 | 0.16 | 0.42 | 0.14 | 0.22 | 0.14 | 1.33 | 0.36 | 790 | 67.1 | 1.6 | 100.5 | 3.7 | |
| Moving logs | 30 | 0.39 | 0.13 | 0.48 | 0.12 | 0.21 | 0.16 | 0.31 | 0.09 | 0.41 | 0.10 | 0.23 | 0.09 | 1.17 | 0.35 | 34 | 66.6 | 1.6 | 98.6 | 2.8 | |
| Driving between trees | 230 | 0.42 | 0.12 | 0.52 | 0.15 | 0.26 | 0.10 | 0.36 | 0.12 | 0.45 | 0.15 | 0.29 | 0.16 | 1.22 | 0.39 | 288 | 66.6 | 1.7 | 98.0 | 3.5 | |
| Total | 609 | 0.37 | 0.09 | 0.49 | 0.12 | 0.20 | 0.06 | 0.32 | 0.14 | 0.42 | 0.14 | 0.23 | 0.13 | 1.30 | 0.36 | 797 | 67.1 | 1.6 | 99.79 | 3.9 | |
| TW-NTW | Moving tree tops and branches | 0.02 | 0.01 | 0.04 * | 0.02 | 0.01 | 0.02 | 0.00 | −0.03 | 0.01 | −0.01 | 0.00 | −0.03 | 0.09 | 0.07 | 0.4 * | −29 | −0.1 | 0.4 | ||
| Felling and processing | 0.00 | 0.00 | 0.03 * | 0.01 | 0.02 * | 0.00 | 0.03 * | 0.13 | 0.04 * | 0.13 | 0.03 * | 0.15 | 0.08 * | 0.06 | 0.5 * | −148 | −0.1 | 0.5 | |||
| Moving logs | 0.02 | 0.00 | 0.01 | 0.01 | 0.02 | −0.09 | 0.02 | 0.01 | 0.02 | 0.00 | 0.01 | 0.01 | 0.20 | 0.07 | 0.00 | −20 | 0.0 | 0.8 | |||
| Driving between trees | 0.01 | 0.00 | 0.02 | 0.00 | 0.02 | 0.01 | −0.01 | −0.03 | 0.01 | −0.03 | 0.01 | −0.04 | 0.07 | 0.06 | 0.7 * | −43 | 0.4 | 1.4 | |||
| Total | 0.01 | −0.02 | 0.04 | −0.01 | 0.03 | 0.00 | 0.03 | 0.14 | 0.05 | 0.11 | 0.04 | 0.15 | 0.11 | 0.02 | 0.47 | −0.1 | 0.02 | 0.6 | |||
| All harvesting trails | Factor | Category | WBV seat | WBV seat | WBV seat | WBV floor | WBV floor | WBV floor | HAV control lever | Noise | ||
| X-axis | Y-axis | Z-axis | X-axis | Y-axis | Z-axis | LAeq | LCpeak | |||||
| p-values | W | 0.83 | <0.001 * | <0.001 * | 0.05 * | 0.002 * | 0.029 * | <0.001 * | <0.001 * | 0.522 | ||
| TS | 0.018 * | 0.018 * | <0.001 * | 0.573 | 0.208 | 0.319 | 0.008 * | 0.035 * | 0.008 * | |||
| DBH | <0.001 * | <0.001 * | <0.001 * | 0.017 * | 0.003 * | 0.009 * | <0.001 * | 0.703 | <0.001 * | |||
| W*TS | 0.002 | 0.577 | 0.126 | 0.598 | 0.771 | 0.711 | 0.308 | 0.286 | 0.705 | |||
| Marginal means | W | NTW | 0.383 | 0.500 | 0.206 | 0.322 | 0.430 | 0.241 | 1.329 | 67.139 | 101.27 | |
| TW | 0.382 | 0.535 | 0.235 | 0.352 | 0.473 | 0.274 | 1.423 | 67.524 | 101.42 | |||
| TS | CON | 0.375 | 0.507 | 0.211 | 0.332 | 0.442 | 0.249 | 1.341 | 67.231 | 101.03 | ||
| DEC | 0.390 | 0.527 | 0.231 | 0.341 | 0.461 | 0.265 | 1.411 | 67.432 | 101.67 | |||
| Harvesting trails: 1, 4, 17, 18 | p-values | W | 0.007 * | <0.001 * | 0.002 * | 0.065 | <0.001 * | 0.005 * | <0.001 * | <0.001 * | 0.105 | |
| TS | 0.003 * | 0.028 * | 0.026 * | 0.223 | 0.006 * | 0.012 * | 0.046 * | 0.066 | 0.307 | |||
| DBH | 0.051 | 0.023 * | 0.014 * | 0.253 | 0.029 * | 0.017 * | 0.003 * | 0.668 | <0.001 * | |||
| W*TS | 0.101 | 0.423 | 0.731 | 0.469 | 0.944 | 0.562 | 0.315 | 0.03 | 0.058 | |||
| Marginal means | W | NTW | 0.356 | 0.463 | 0.194 | 0.299 | 0.390 | 0.219 | 1.238 | 65.935 | 101.31 | |
| TW | 0.398 | 0.566 | 0.226 | 0.334 | 0.484 | 0.253 | 1.490 | 67.325 | 100.24 | |||
| TS | CON | 0.353 | 0.49 | 0.198 | 0.304 | 0.413 | 0.220 | 1.294 | 66.351 | 100.42 | ||
| DEC | 0.401 | 0.539 | 0.222 | 0.328 | 0.461 | 0.252 | 1.433 | 66.909 | 101.12 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pajek, L.; Šušnjar, M.; Poje, A. Operator Exposure to Vibration and Noise During Steep Terrain Harvesting. Forests 2025, 16, 741. https://doi.org/10.3390/f16050741
Pajek L, Šušnjar M, Poje A. Operator Exposure to Vibration and Noise During Steep Terrain Harvesting. Forests. 2025; 16(5):741. https://doi.org/10.3390/f16050741
Chicago/Turabian StylePajek, Luka, Marijan Šušnjar, and Anton Poje. 2025. "Operator Exposure to Vibration and Noise During Steep Terrain Harvesting" Forests 16, no. 5: 741. https://doi.org/10.3390/f16050741
APA StylePajek, L., Šušnjar, M., & Poje, A. (2025). Operator Exposure to Vibration and Noise During Steep Terrain Harvesting. Forests, 16(5), 741. https://doi.org/10.3390/f16050741