Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services


Abstract
:1. Introduction
2. The Need for Hardware Performance Assessment When Controlling EVs
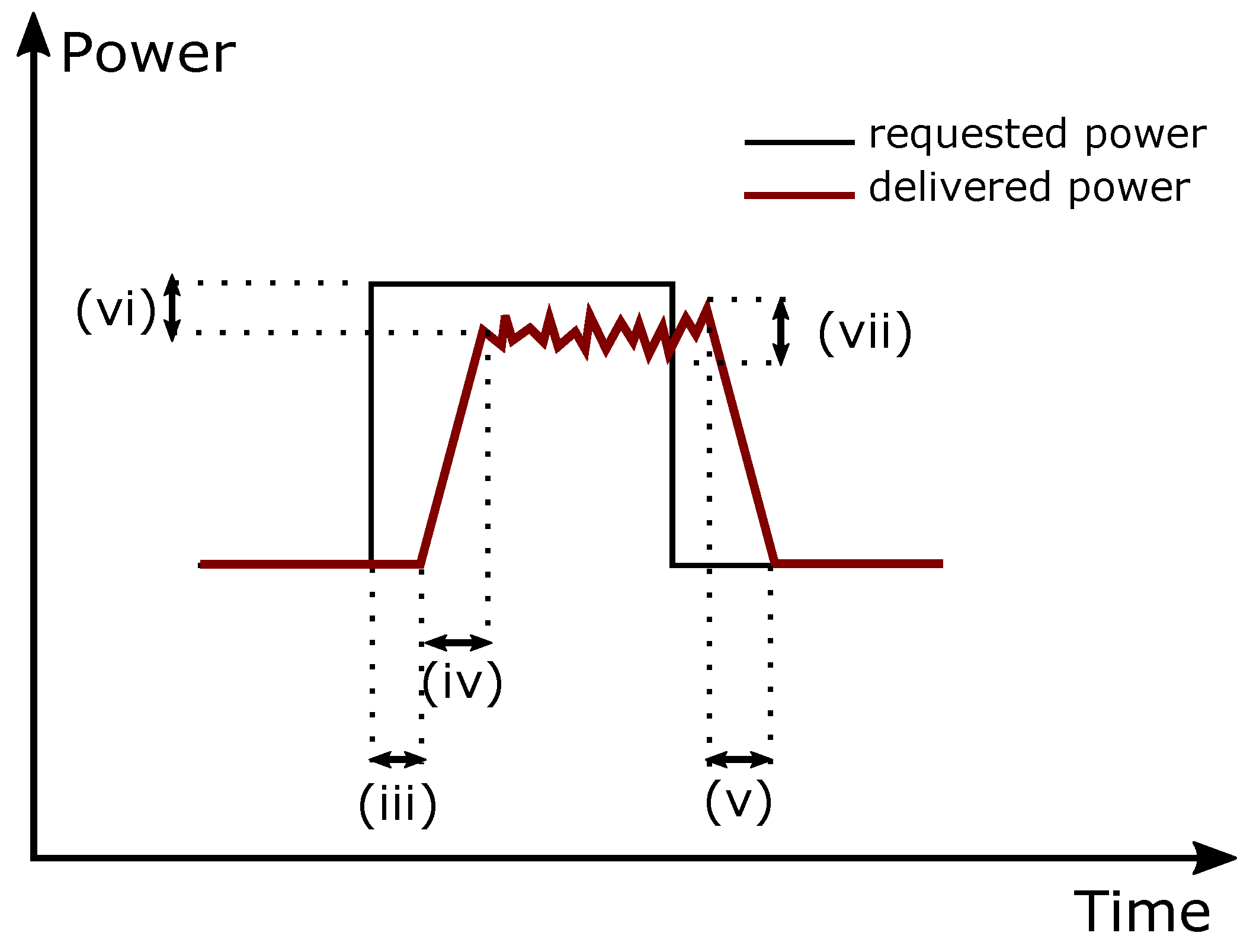
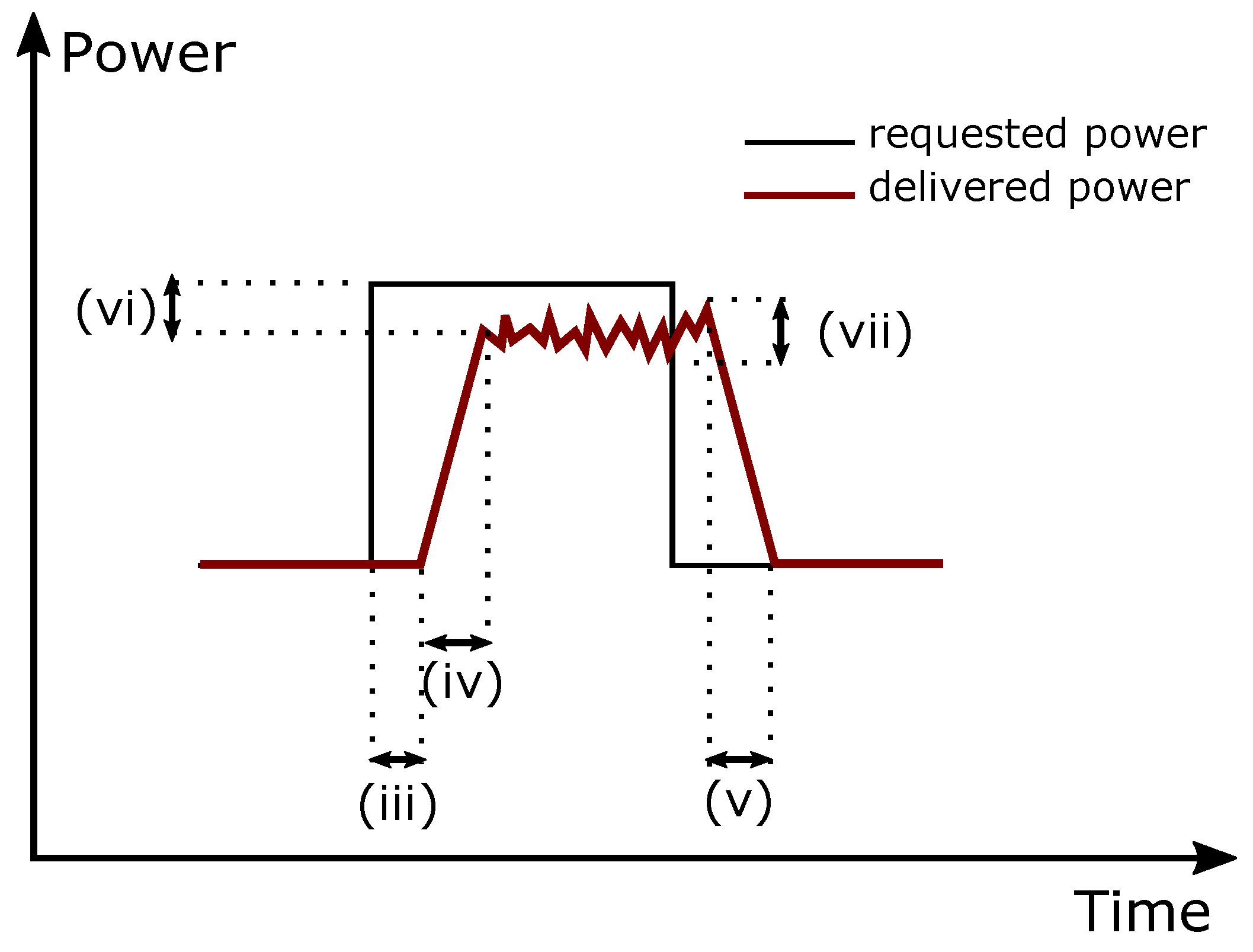
- (i) Direction: The information if an EV can provide only uni-directional or bi-directional (V2G) power flow.
- (ii) Set-point linearity: The discreteness of the charging/discharging power set-point.
- (iii) Starting time and maximum activation time: The period between receiving the set-point and activating the flexibility.
- (iv-v) Ramp-up/ramp-down time: The up/downwards time between activation time and full service provision, and vice versa.
- (vi) Accuracy: The difference between the required and the delivered response, e.g., the acceptable response band.
- (vii) Precision: The variation of the delivered response for a given set-point.
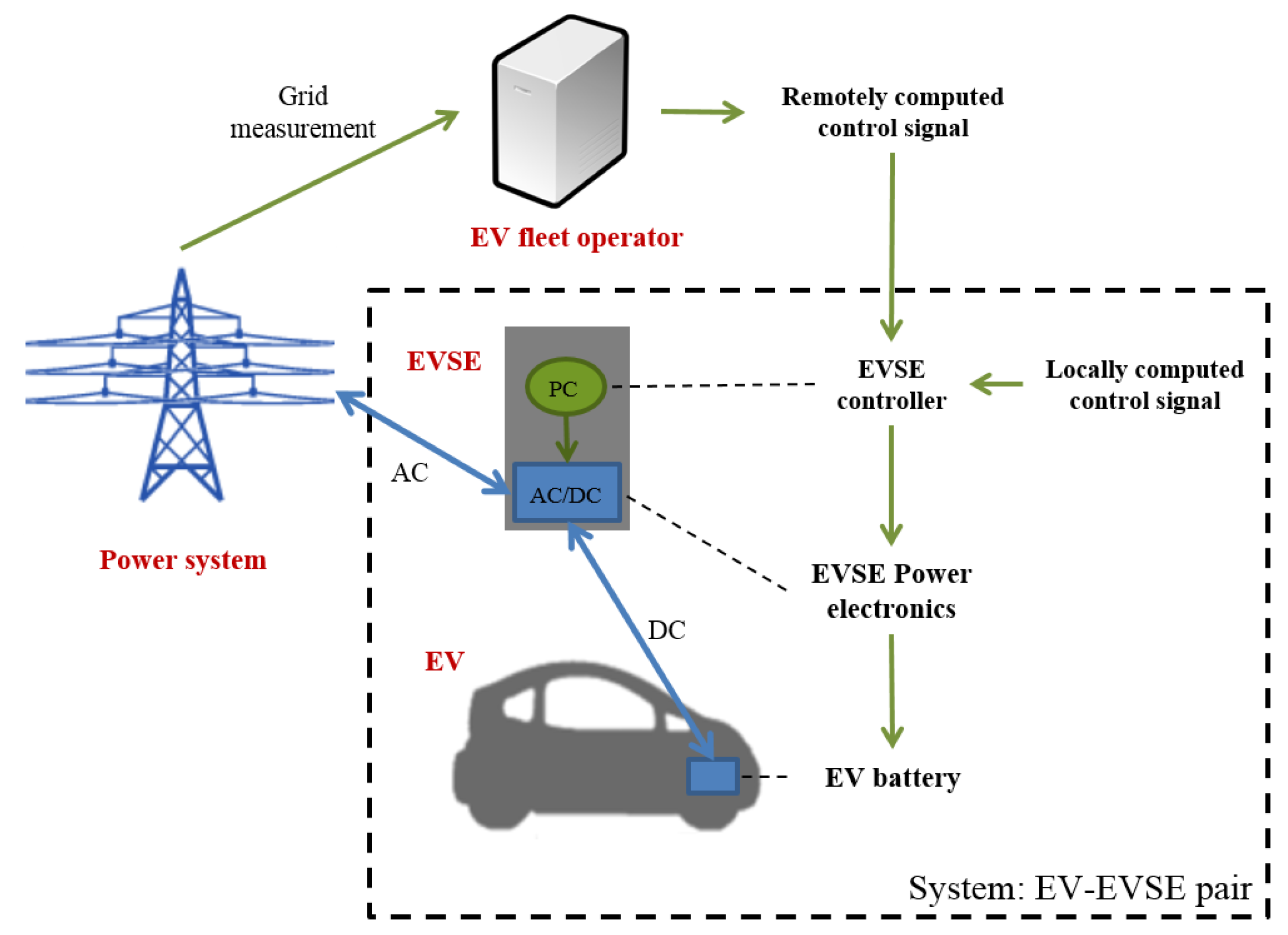
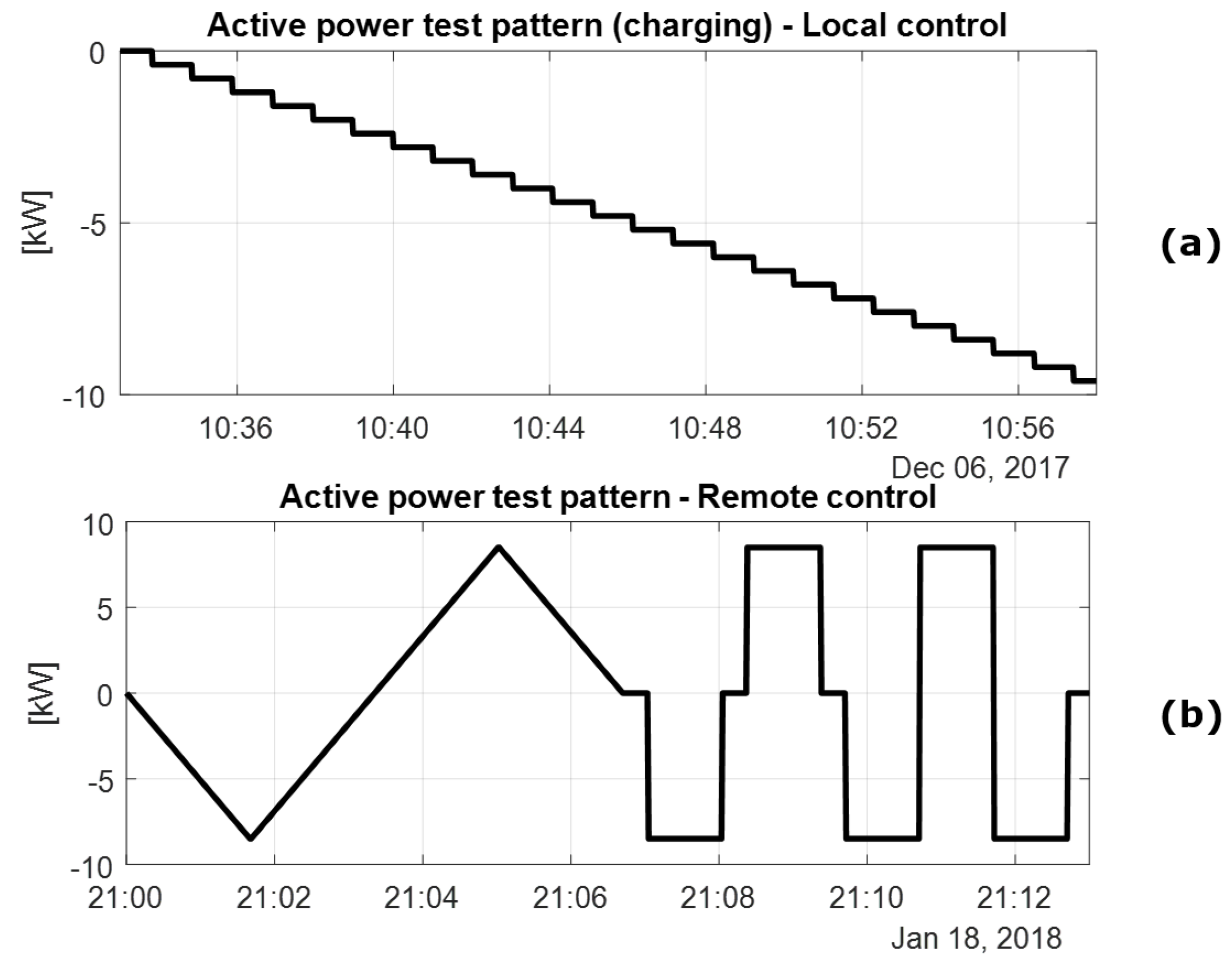
3. Locally and Remotely Controlled EVs Performance Tests
3.1. Outcome of Local Control Tests
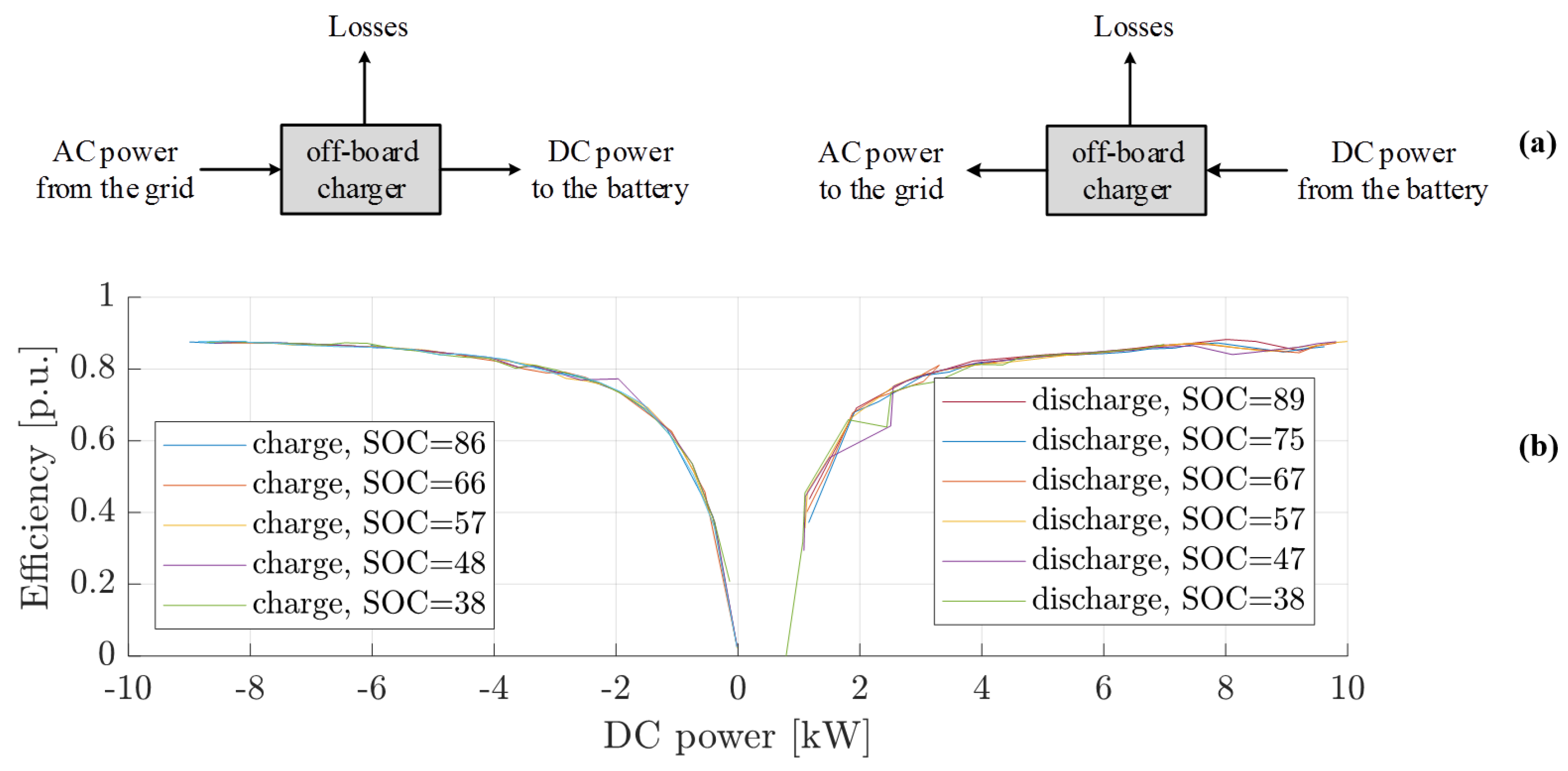
3.1.1. Calculation of Efficiency Map
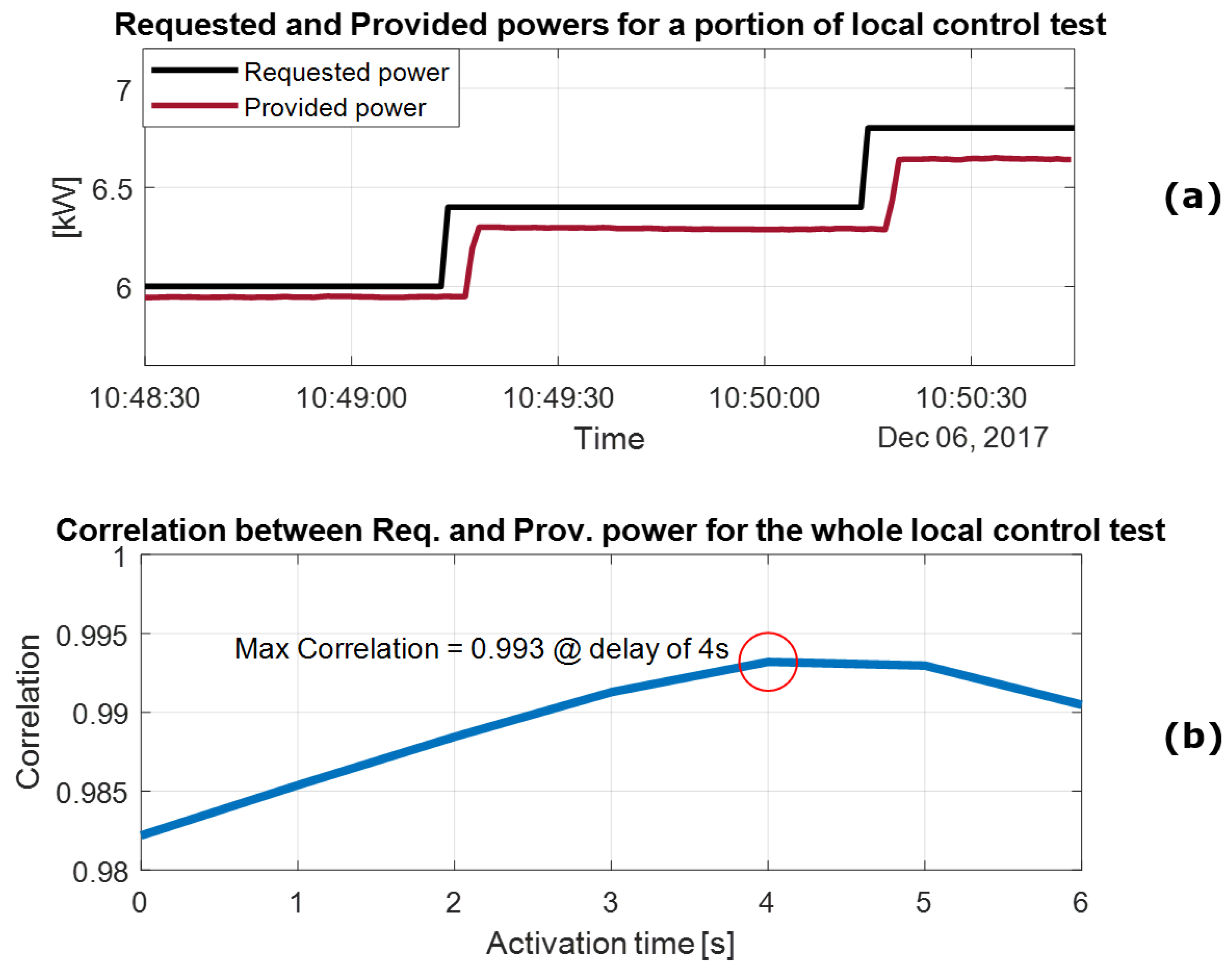
3.1.2. Calculation of Activation Time
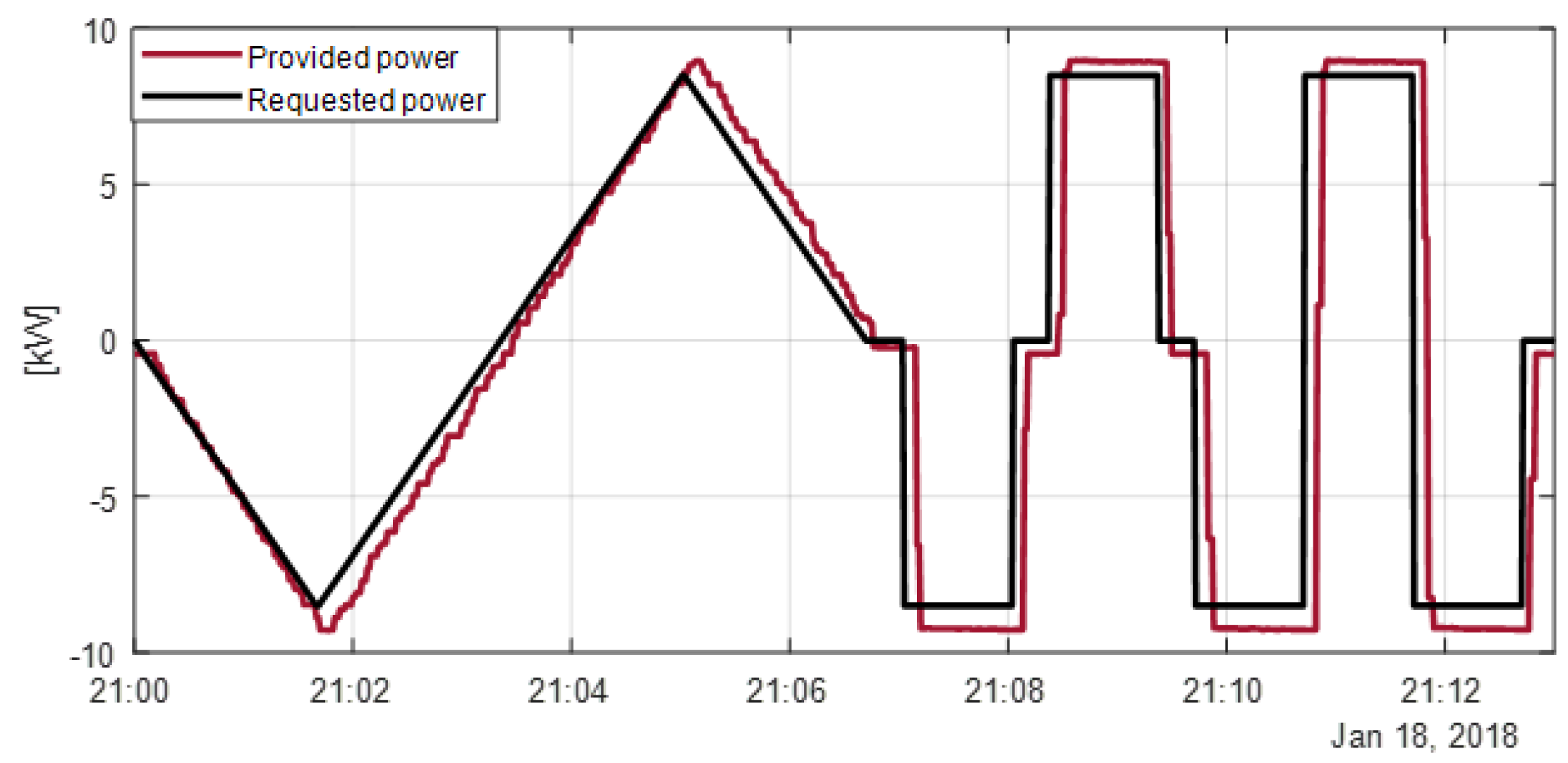
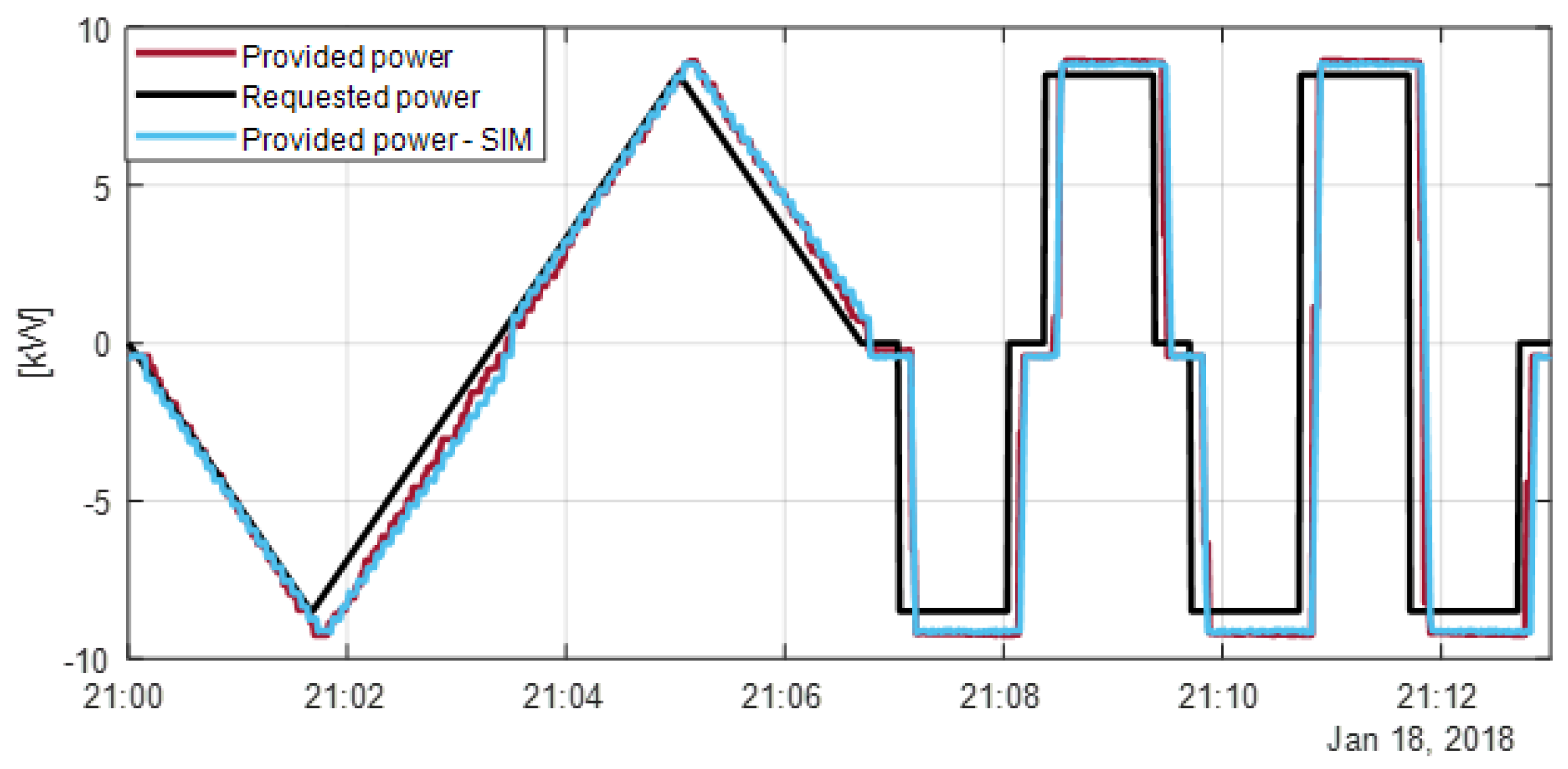
3.2. Outcome of Remote Control Tests
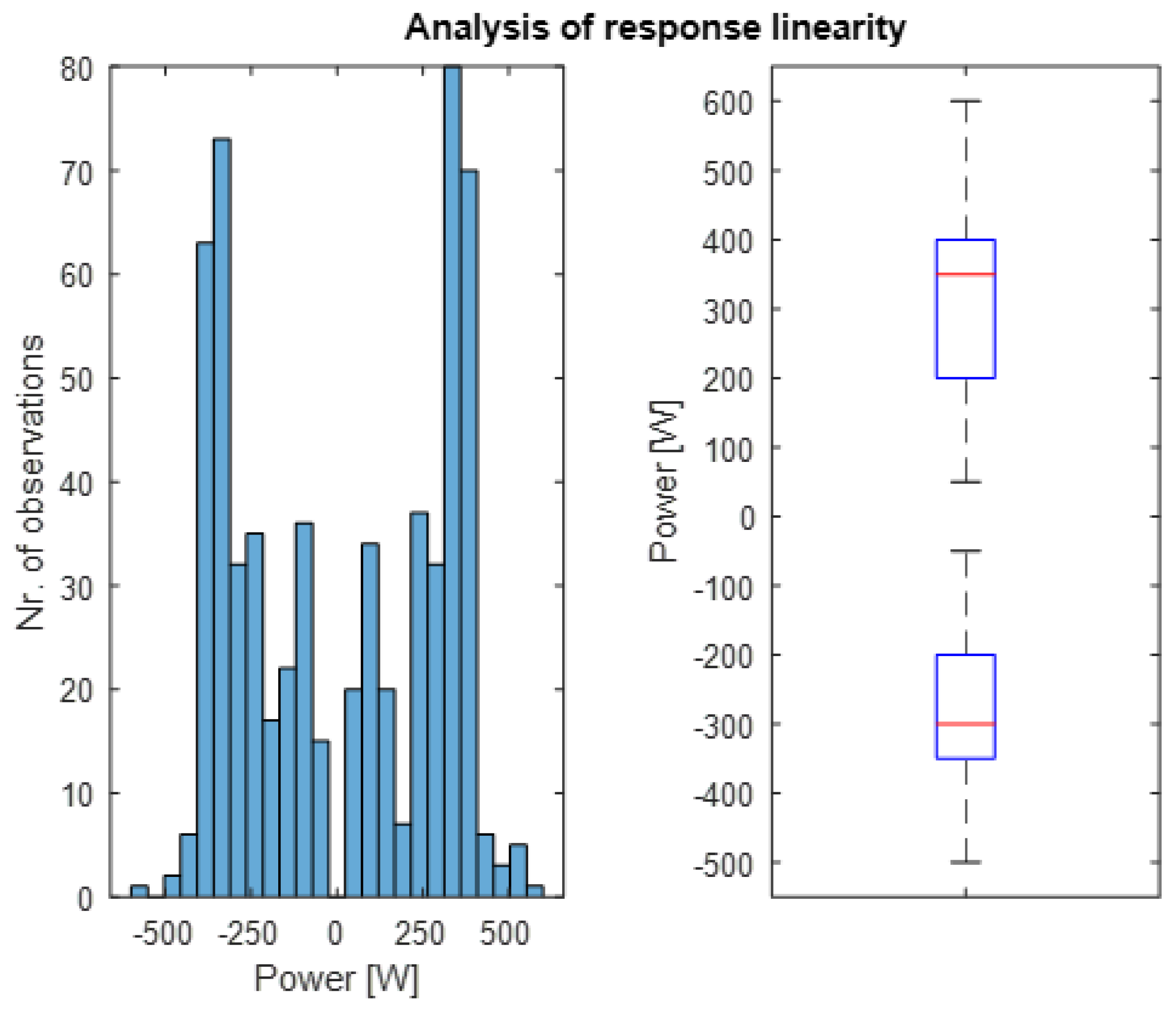
3.2.1. Calculation of Set-Point Linearity
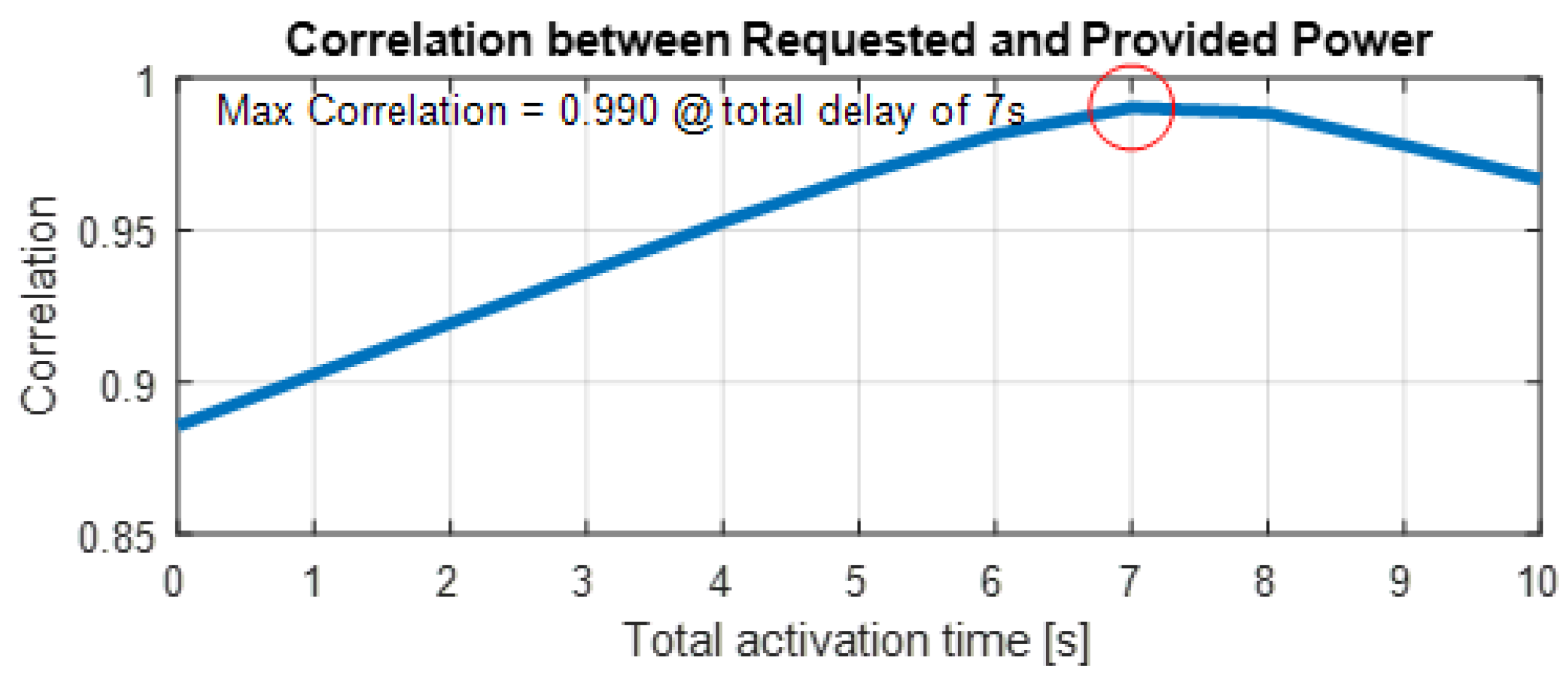
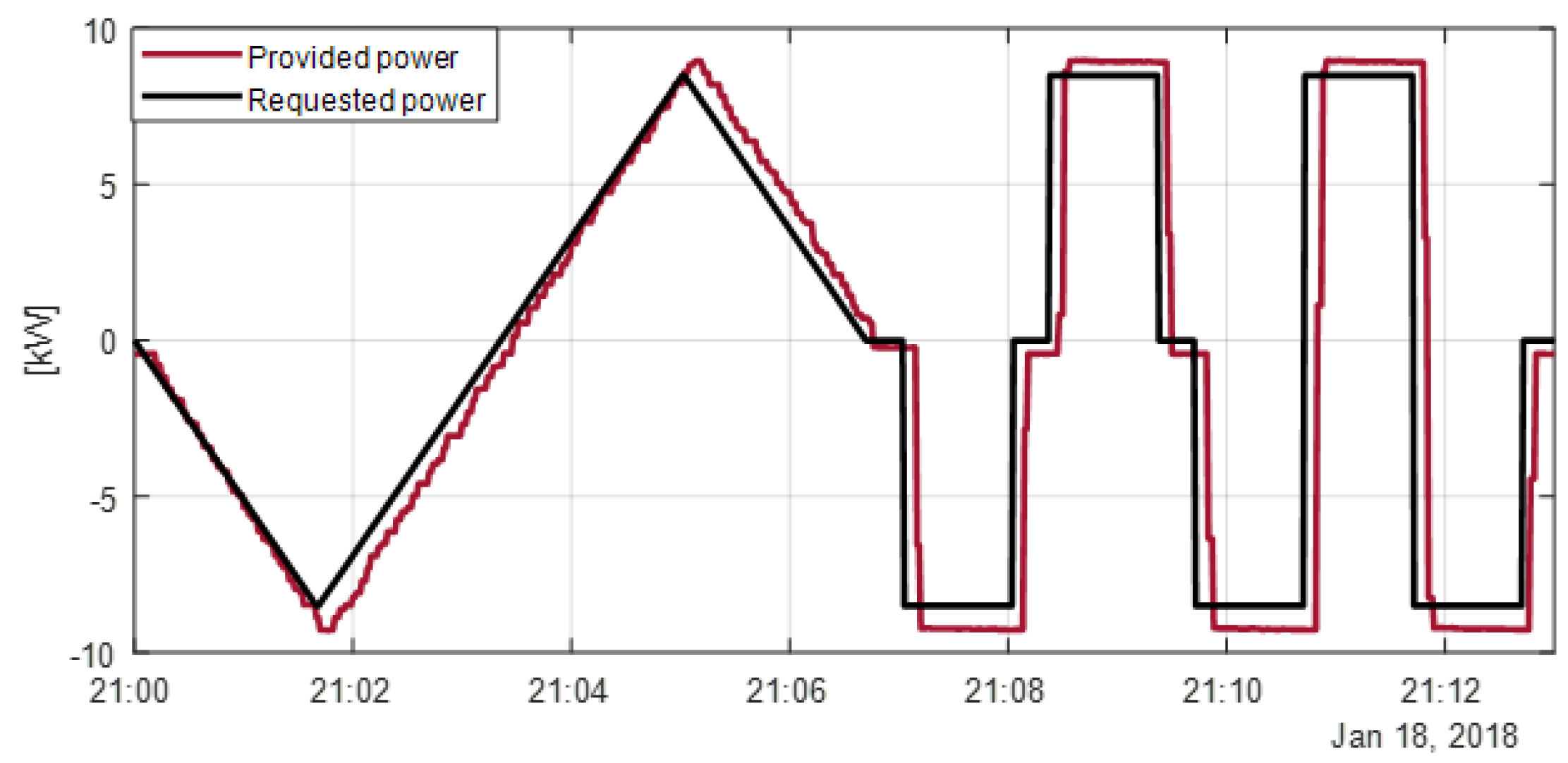
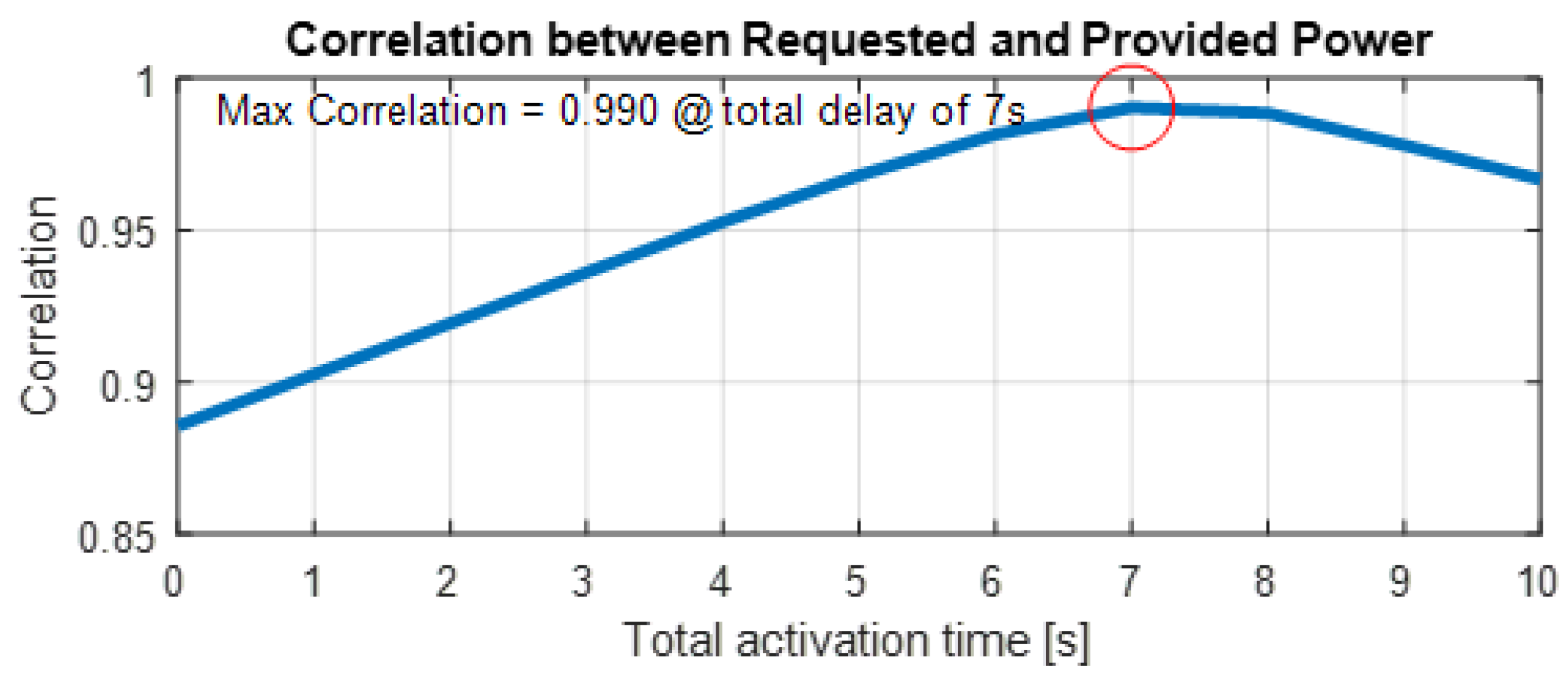
3.2.2. Calculation of Total Activation Time
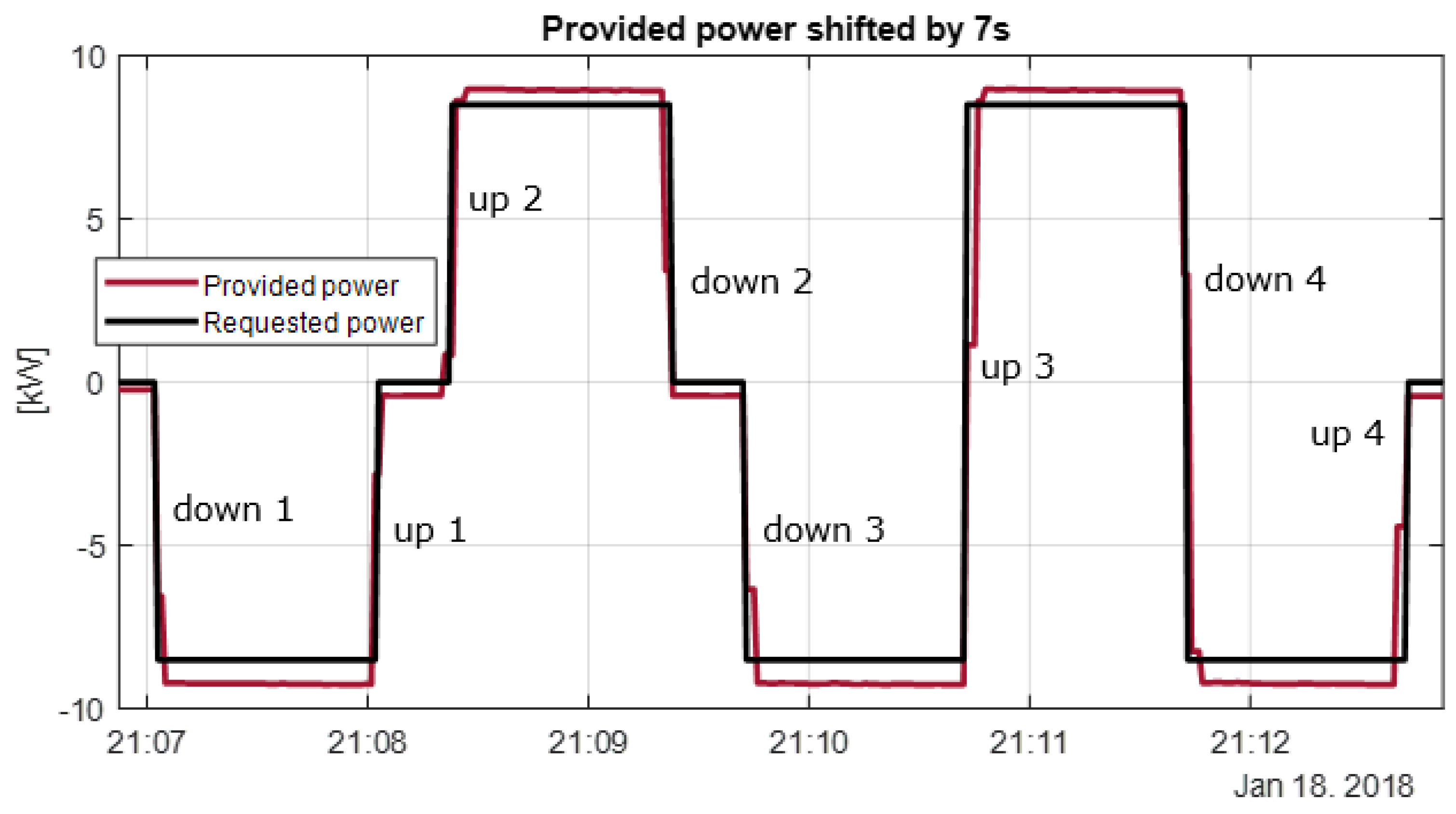
3.2.3. Calculation of Ramping Up/Down
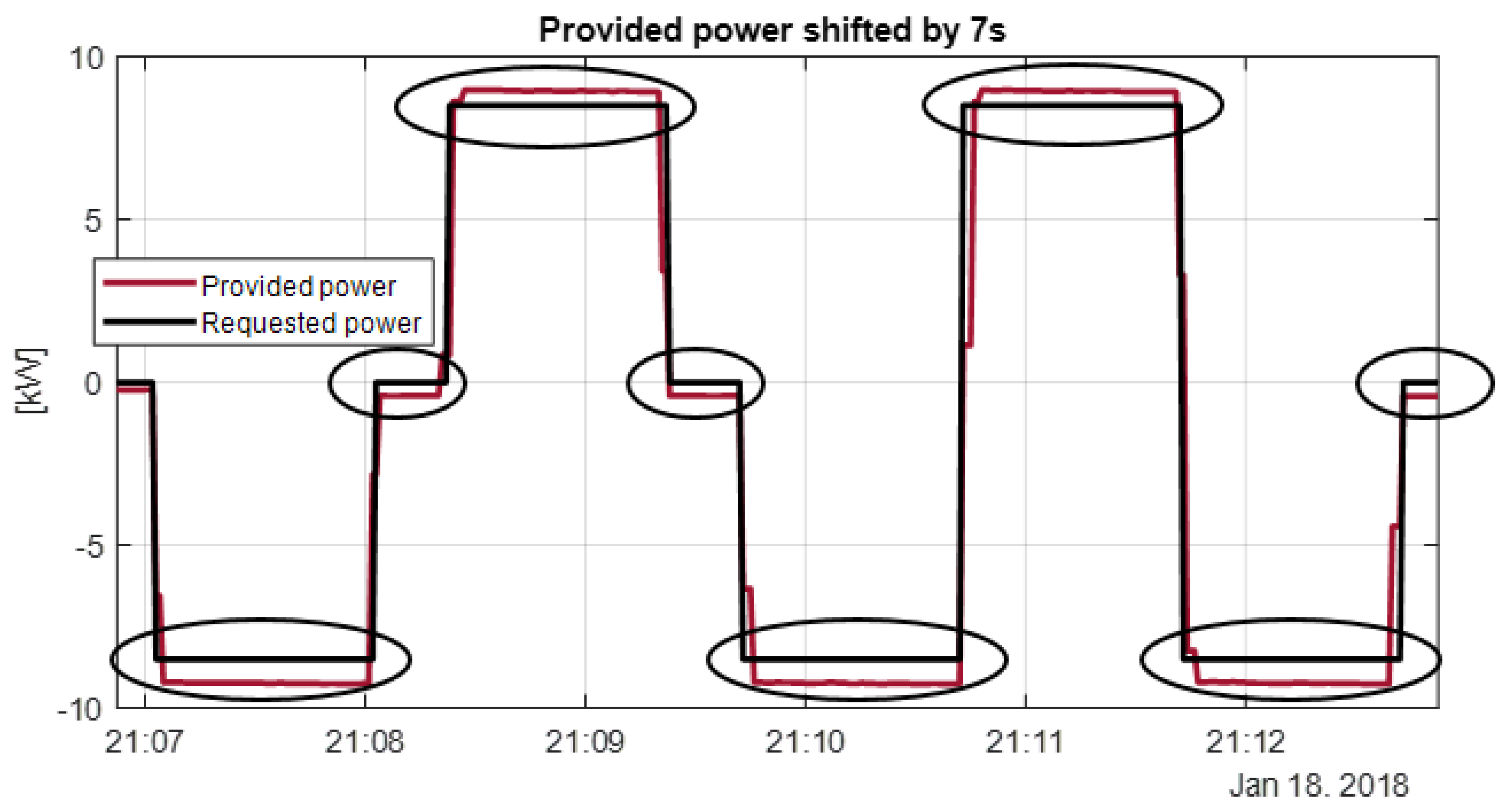
3.2.4. Calculation of Set-Point Accuracy
3.2.5. Calculation of Set-Point Precision
4. Experimental Tests Discussion
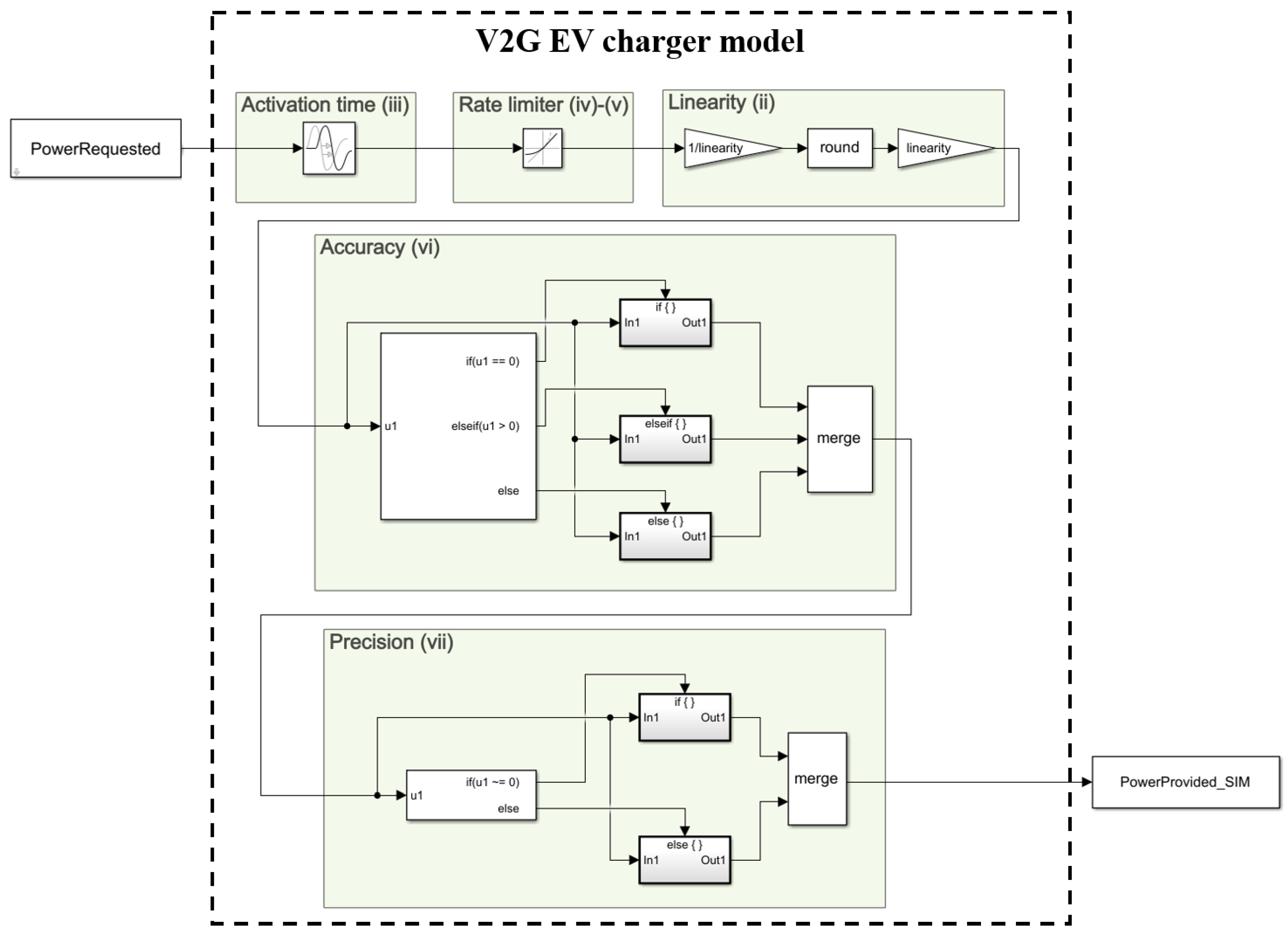
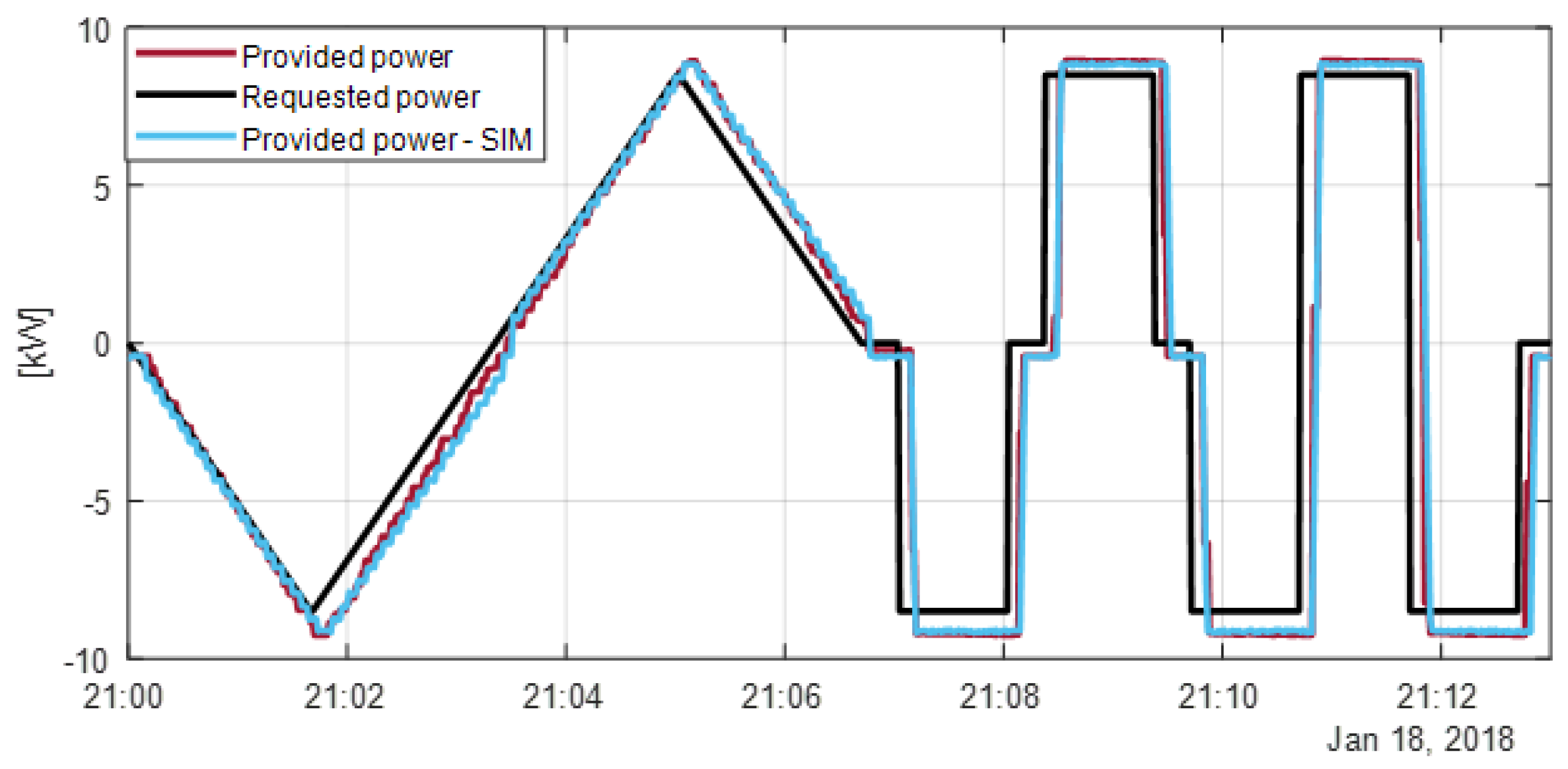
5. Modelling of the Tested Hardware
- the Activation time (iii) is modelled as a transport delay, equal to 4 s or 7 s in case of local or remote control, respectively;
- the Ramp-up/-down time (iv)–(v) is modelled with a rate limiter block, with the mean values 3.35 kW/s and 3.31 kW/s, respectively;
- the Set-point linearity (ii) is obtained by implementing Equation (1):where inlin and outlin are the non-rounded and the rounded power signals, respectively, whereas linearity is a constant parameter equal 400 W;
- the Accuracy (vi) is implemented by adding to the power set-point the appropriate mean value of accuracy, i.e., 740 W, −440 W, and 420 W for negative set-point, positive set-point and zero set-point, respectively. The implementation is obtained according to Equation (2):
- the Precision (vii) is implemented by adding a uniformly distributed noise to the calculated set-point. On average, the noise has a an amplitude of 50 W and 6 W for set-point ≠ 0 and for zero set-point, respectively. The implementation is obtained according to Equation (3):where r is a random number uniformly distributed between −1 and +1 throughout the simulation.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Knezović, K.; Martinenas, S.; Andersen, P.B.; Zecchino, A.; Marinelli, M. Enhancing the Role of Electric Vehicles in the Power Grid: Field Validation of Multiple Ancillary Services. IEEE Trans. Transp. Electrif. 2016, 3, 201–209. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sustain. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef]
- Zecchino, A.; Knezović, K.; Marinelli, M. Identification of Conflicts between Transmission and Distribution System Operators when Acquiring Ancillary Services from Electric Vehicles. In Proceedings of the 7th IEEE PES Innovative Smart Grid Technologies Europe (ISGT Europe), Torino, Italy, 26–29 September 2017; pp. 1–6. [Google Scholar]
- Leemput, N.; Geth, F.; Juan Van, R.; Jeroen, B.; Johan, D.; Marinelli, M. Reactive power support in residential LV distribution grids through electric vehicle charging. Sustain. Energy Grids Netw. 2015, 3, 24–35. [Google Scholar] [CrossRef]
- Zecchino, A.; Marinelli, M. Analytical assessment of voltage support via reactive power from new electric vehicles supply equipment in radial distribution grids with voltage-dependent loads. Int. J. Electr. Power Energy Syst. 2018, 97, 17–27. [Google Scholar] [CrossRef]
- Arias, M.N.B.; Hashemi, S.; Andersen, P.B.; Træholt, C.; Romero, R. V2G Enabled EVs Providing Frequency Containment Reserves: Field Results. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT 2018), Lyon, France, 20–22 February 2018; pp. 1–6. [Google Scholar]
- González Vayá, M.; Andersson, G. Combined Smart-Charging and Frequency Regulation for Fleets of Plug-in Electric Vehicles. In Proceedings of the 2013 IEEE Power & Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5. [Google Scholar]
- Bergaentzlé, C.; Boscán, L.; Skytte, K.; Rosenlund Soysal, E.; Olsen, O.J. Flex4RES - Framework Conditions for Flexibility in the Electricity Sector; Nordic Energy Research: Oslo, Norway, 2016. [Google Scholar]
- Borne, O.; Korte, K.; Perez, Y.; Petit, M.; Purkus, A. Barriers to entry in frequency-regulation services markets: Review of the status quo and options for improvements. Renew. Sustain. Energy Rev. 2018, 81, 605–614. [Google Scholar] [CrossRef]
- Kester, J.; Noel, L.; Zarazua de Rubens, G.; Sovacool, B.K. Promoting Vehicle to Grid (V2G) in the Nordic region: Expert advice on policy mechanisms for accelerated diffusion. Energy Policy 2018, 116, 422–432. [Google Scholar] [CrossRef]
- MacDonald, J.; Cappers, P.; Callaway, D.; Kiliccote, S. Demand response providing ancillary services—A Comparison Of Opportunities And Challenges In The US Wholesale Markets. In Proceedings of the Grid-Interop Forum 2012, Irving, TX, USA, 3–6 December 2012. [Google Scholar]
- SEDC Smart Energy Demand Coalition. Explicit Demand Response in Europe: Mapping the Markets 2017; SEDC Smart Energy Demand Coalition, 2016. [Google Scholar]
- Arentsen, M.G.; Juhler-Verdoner, H.; Møller Jørgensen, J.; Stougaards Kiil, U.; Holst, M. Market models for aggregators—Activation of flexibility. 2017. Available online: https://en.energinet.dk/-/media/Energinet/Publikationer-TLU/Markedsmodel/Market-models-for-aggregators.pdf?la=en (accessed on 23 April 2019).
- Energinet.dk. Danish Technical Standard: Ancillary Services to Be Delivered in Denmark—Tender Conditions. 2017. Available online: https://en.energinet.dk/-/media/Energinet/El-RGD/Dokumenter/Ancillary-services-to-be-delivered-in-Denmark.pdf (accessed on 23 April 2019).
- Zecchino, A.; Prostejovsky, A.M.; Charalampos Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Moghadam, M.; Zhang, R.; Ma, R. Distributed Frequency Control via Randomized Response of Electric Vehicles in Power Grid. IEEE Trans. Sustain. Energy 2016, 7, 312–324. [Google Scholar] [CrossRef]
- Zhao, Y.; Noori, M.; Tatari, O. Vehicle to Grid regulation services of electric delivery trucks: Economic and environmental benefit analysis. Appl. Energy 2016, 170, 161–175. [Google Scholar] [CrossRef]
- ACES Project—Across Continents Electric Vehicle Services. 2017. Available online: http://aces-bornholm.eu (accessed on 23 April 2019).
- The Parker Project. 2016. Available online: http://parker-project.com (accessed on 23 April 2019).
- INVENT Project—Intelligent Electric Vehicle Integration. 2017. Available online: https://rmp.ucsd.edu/_files/sei/INVENT-Flyer.pdf (accessed on 23 April 2019).
- GridMotion Project—Reducing Electric Vehicle Usage Cost Thanks to Smartcharging Process. 2017. Available online: https://www.enel.com/content/dam/enel-common/press/en/1667129-2_PDF-1.pdf (accessed on 23 April 2019).
- Zecchino, A.; Thingvad, A.; Andersen, P.B.; Marinelli, M. Suitability of Commercial V2G CHAdeMO Chargers for Grid Services. In Proceedings of the EVS 31 & EVTeC 2018 The 31st International Electric Vehicles Symposium and Exhibition & International Electric Vehicle Technology Conference 2018, Kobe, Japan, 30 September–3 October 2018; pp. 1–7. [Google Scholar]
- NISSAN. Nissan, Enel and Nuvve Operate World’s First Fully Commercial Vehicle-to-Grid Hub in Denmark. 2016. Available online: https://denmark.nissannews.com/da-DK/releases/release-149191-nissan-enel-and-nuvve-operate-world-s-first-fully-commercial-vehicle-to-grid-hub-in-denmark (accessed on 23 April 2019).
- DEIF MIC-2. Available online: https://www.deif.com/products/mic2 (accessed on 23 April 2019).
- Thingvad, A.; Ziras, C.; Hu, J.; Marinelli, M. Assessing the Energy Content of System Frequency and Electric Vehicle Charging Efficiency for Ancillary Service Provision. In Proceedings of the 52nd International Universities’ Power Engineering Conference, Crete, Greece, 28–31 August 2017; pp. 1–6. [Google Scholar]
- Danish Technical Regulation 3.3.1 for Battery Plants. 2017. Available online: https://en.energinet.dk/Electricity/Rules-and-Regulations/Regulations-for-grid-connection (accessed on 23 April 2019).
- Ziras, C.; Zecchino, A.; Marinelli, M. Response Accuracy and Tracking Errors with Decentralized Control of Commercial V2G Chargers. In Proceedings of the 20th Power Systems Computation Conference (PSCC 2018), Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cycle 1 | Cycle 2 | Cycle 3 | Cycle 4 | |
|---|---|---|---|---|
| up 1 | 8.84 kW in 3 s | 8.84 kW in 4 s | 8.82 kW in 3 s | 8.84 kW in 4 s |
| up 2 | 9.03 kW in 4 s | 9.04 kW in 4 s | 9.03 kW in 4 s | 9.04 kW in 5 s |
| up 3 | 17.87 kW in 6 s | 17.85 kW in 6 s | 17.88 kW in 4 s | 17.86 kW in 6 s |
| up 4 | 8.84 kW in 4 s | 8.84 kW in 1 s | 8.83 kW in 4 s | 8.84 kW in 3 s |
| Ramp-up AVG | 3.35 kW/s | |||
| down 1 | 8.99 kW in 3 s | 8.79 kW in 4 s | 8.79 kW in 4 s | 8.99 kW in 3 s |
| down 2 | 9.33 kW in 3 s | 9.16 kW in 1 s | 9.17 kW in 1 s | 9.16 kW in 4 s |
| down 3 | 8.79 kW in 4 s | 8.98 kW in 3 s | 8.97 kW in 4 s | 8.99 kW in 4 s |
| down 4 | 18.12 kW in 6 s | 18.14 kW in 7 s | 18.13 kW in 7 s | 18.14 kW in7 s |
| Ramp-down AVG | 3.31 kW/s | |||
| Attribute | Short Description | Unit | Target for Primary Reserve [14,26] | Test Result |
|---|---|---|---|---|
| (i) Direction | Support of bi- directional power flow | +/−/± | ± | ± i.e., V2G capable |
| (ii) Set-point linearity | Supported set-point throughout the power range | [W] | Linear at 1% | <400 W (4%) (1 A @ 400V DC) |
| (iii) Starting time and max. activation time | Time between set-point request and change in active power | [s] | <15 s | Local control: 4 s Remote control: 7 s |
| (iv) Ramp-up time | Supported rate of change in power (increase) | [kW/s] | For the aggregate: 10–300 kW/s | AVG = 3.35 kW/s Max = 8.84 kW/s min = 1.81 kW/s |
| (v) Ramp-down time | Supported rate of change in power (increase) | [kW/s] | For the aggregate: 10–300 kW/s | AVG = 3.31 kW/s Max = 9.17 kW/s min = 1.98 kW/s |
| (vi) Accuracy | Difference between required and delivered response | [W] | ±5% of set-point & ±0.5% of rated pow. | Negative set-point: 740 W (+8.7% of set-point) (+7.4% of rated pow.) Positive set-point: −440 W (-5.2% of set-point) (−4.4% of rated pow.) 420 W @ zero set-point (4.2% of rated pow.) |
| (vii) Precision | Variation of the delivered response | [W] | NA | ≈50 W (0.6% of set-point) (0.5% of rated pow.) 6 W @ zero set-point (0.06% of rated pow.) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zecchino, A.; Thingvad, A.; Andersen, P.B.; Marinelli, M. Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services. World Electr. Veh. J. 2019, 10, 21. https://doi.org/10.3390/wevj10020021
Zecchino A, Thingvad A, Andersen PB, Marinelli M. Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services. World Electric Vehicle Journal. 2019; 10(2):21. https://doi.org/10.3390/wevj10020021
Chicago/Turabian StyleZecchino, Antonio, Andreas Thingvad, Peter Bach Andersen, and Mattia Marinelli. 2019. "Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services" World Electric Vehicle Journal 10, no. 2: 21. https://doi.org/10.3390/wevj10020021
APA StyleZecchino, A., Thingvad, A., Andersen, P. B., & Marinelli, M. (2019). Test and Modelling of Commercial V2G CHAdeMO Chargers to Assess the Suitability for Grid Services. World Electric Vehicle Journal, 10(2), 21. https://doi.org/10.3390/wevj10020021