





World Electr. Veh. J. 2026, 17(6), 304; https://doi.org/10.3390/wevj17060304 (registering DOI) - 9 Jun 2026
Abstract
Electric vehicle (EV) charging behaviors exhibit significant heterogeneity in terms of price sensitivity, time-of-day preference, and weekend charging habits, creating challenges for charging demand prediction and service management. To address this issue, this paper proposes a three-variable charging response framework that jointly considers
[...] Read more.
Electric vehicle (EV) charging behaviors exhibit significant heterogeneity in terms of price sensitivity, time-of-day preference, and weekend charging habits, creating challenges for charging demand prediction and service management. To address this issue, this paper proposes a three-variable charging response framework that jointly considers electricity price, time-of-day preference, and weekend preference. Using real charging-order data from a public charging platform, four behavioral parameters, namely baseline charging demand (Q0), price sensitivity (α), time preference (β), and weekend preference (γ), are estimated through nonlinear least squares (NLS). Based on the extracted parameter vectors, K-means clustering is employed to identify five representative user groups: Commuting-Dominant, elastic energy-saving, Weekend-Switching, Night-Preferential, and discount-sensitive users. The results reveal substantial behavioral heterogeneity among users. To validate the proposed framework, both parameter interpretability analysis and benchmark comparisons are conducted. Compared with the best baseline model, the proposed method reduces the test RMSE from 11.5 kWh to 8.3 kWh (27.8%), decreases the test MAPE from 25.3% to 18.7% (26.1%), and improves the test R2 from 0.70 to 0.80. The proposed framework provides an interpretable approach for EV charging behavior modeling and user segmentation, offering practical support for differentiated pricing, charging demand management, and intelligent charging service operation.
Full article
(This article belongs to the Section Marketing, Promotion and Socio Economics)
►
Show Figures
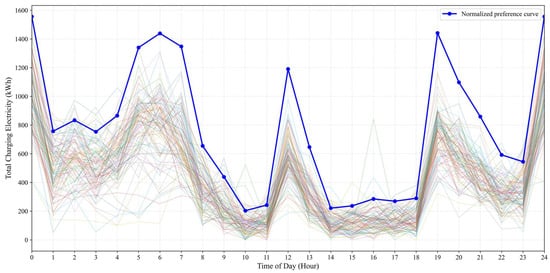
Figure 1

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}