Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations †

 ,
, 
Abstract
:1. Introduction
2. Fundamental Research Background and State of the Art of IPT Applications to Non-Guided Surface Transport
- -
- The increase of frequency to improve the power transfer capability.
- -
- The use of capacitors connected to the coils to create a resonant system and improve effectiveness.
- -
- The fixed part of the Dynamic IPT system should be integrated in a representative road environment, enabling easy access for tune-up and maintenance
- -
- The mobile part of the Dynamic IPT system should be integrated in a serial car
- -
- The IPT system should enable
- ⚬
- Charge from 0 to 100 km/h (to cover speed range for urban to highway use cases)
- ⚬
- Operate at 85 kHz. This frequency is in compliance with the emerging standardization objective issued from the industry considering difficulty of meeting Electromagnetic Field (EMF) and Electromagnetic Compatibility (EMC) requirements, packaging on vehicle, mass and volume, comparative cost of power electronics as explained in [43] (p. 10)
- ⚬
- Charge of two vehicles on a 100 m test track (to ensure a minimum representativity at reasonable project cost)
- ⚬
- Charge up to 20 kW (which is representative of the traction power needed for a small passenger car at highway speed)
- -
- Road integration: the previous demonstration of dynamic IPT charging on a passenger car was done in laboratory conditions [35]. This demonstration is intended in a real civil engineered road and in real climatic conditions
- -
- Driving conditions: the previous demonstration of dynamic IPT charging on a passenger car was done from stationary to low speeds [35]. This study was designed from stationary to highway speed (100 km/h)
- -
- Number of passenger vehicles demonstrated: single vehicle charging was previously demonstrated [35]. The Versailles-Satory charging scenario for FABRIC involves two vehicles
- -
- Operating frequency: from Table 1, previous demonstrations were done at operating frequencies between 15 and 25 kHz. This demonstration was designed for a current standard operating frequency of 85 kHz.
- -
- It describes the experimental road infrastructure implemented, the additional equipment integrated in a serial car, the characterization means, and methods used. Finally, it provides most recent investigations’ methodology (Section 3, Material and Methods)
- -
- It resumes the final characterized performances and safety assessment of the prototype system, provides the latest results and discussions (Section 4, Public Demonstrations, Validation Result and Discussions)
- -
- It concludes on the results achieved vs. the initial objectives (Section 5, Conclusions) and on the next use cases which should be further demonstrated. Finally, it describes the remaining gaps to be bridged and how further developed IPT systems could find their place in future ERS ecosystems.
3. Material and Methods
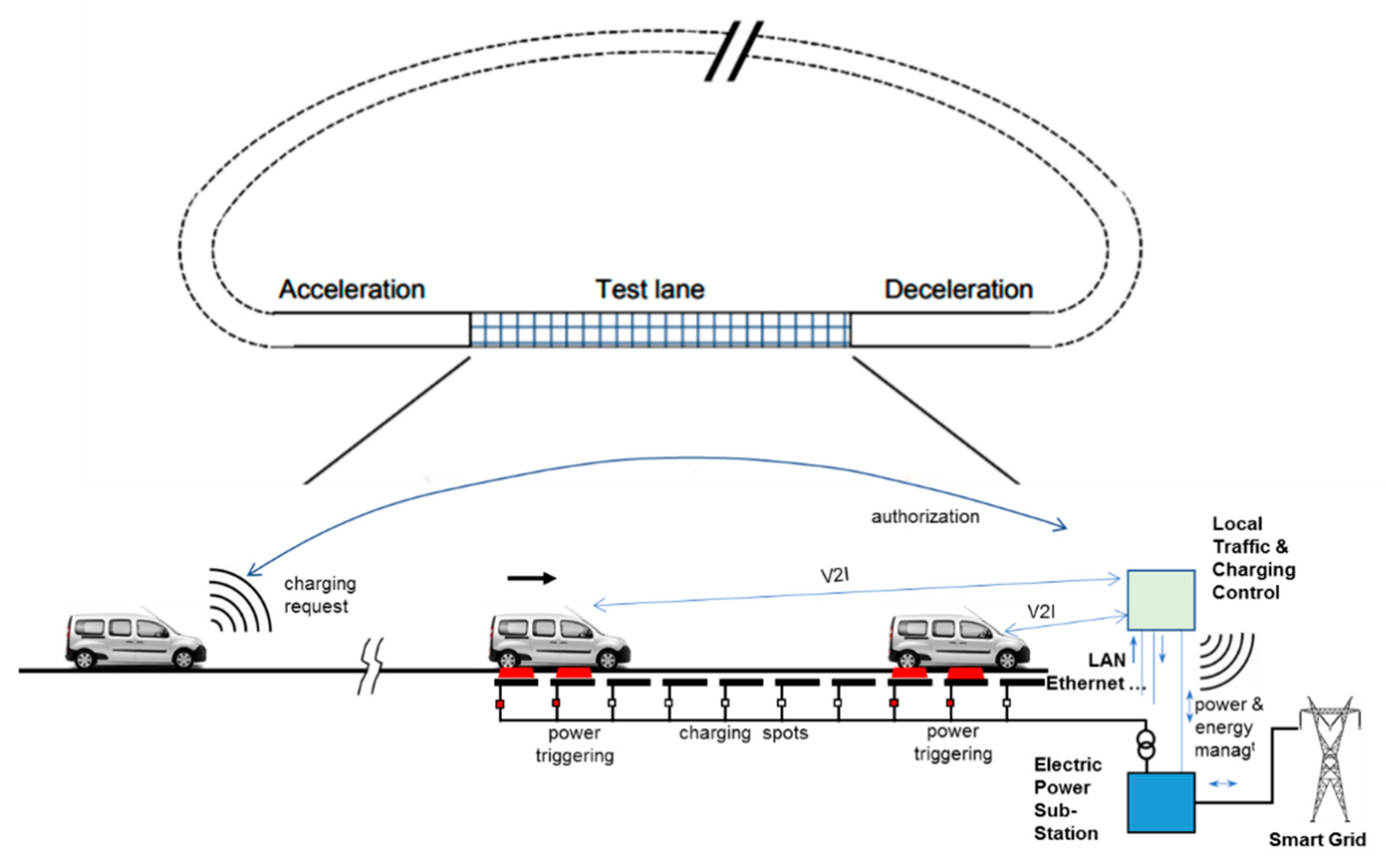
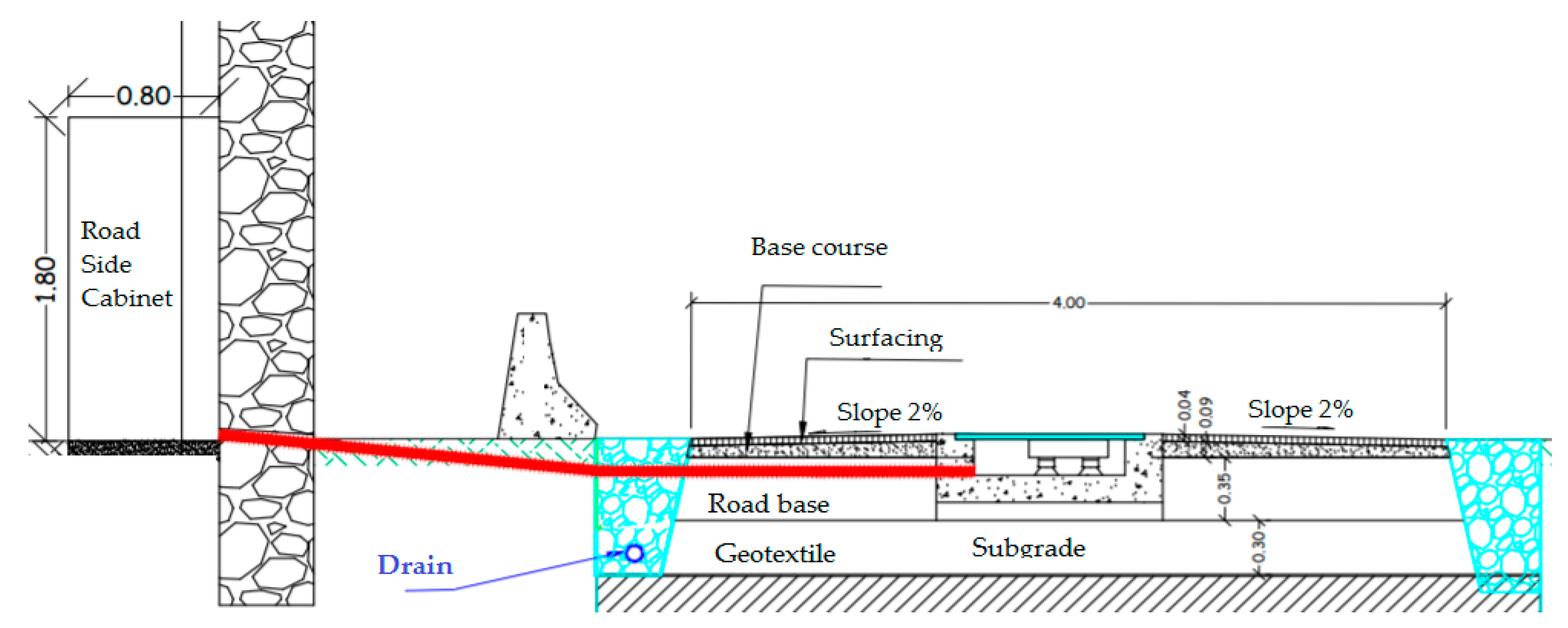
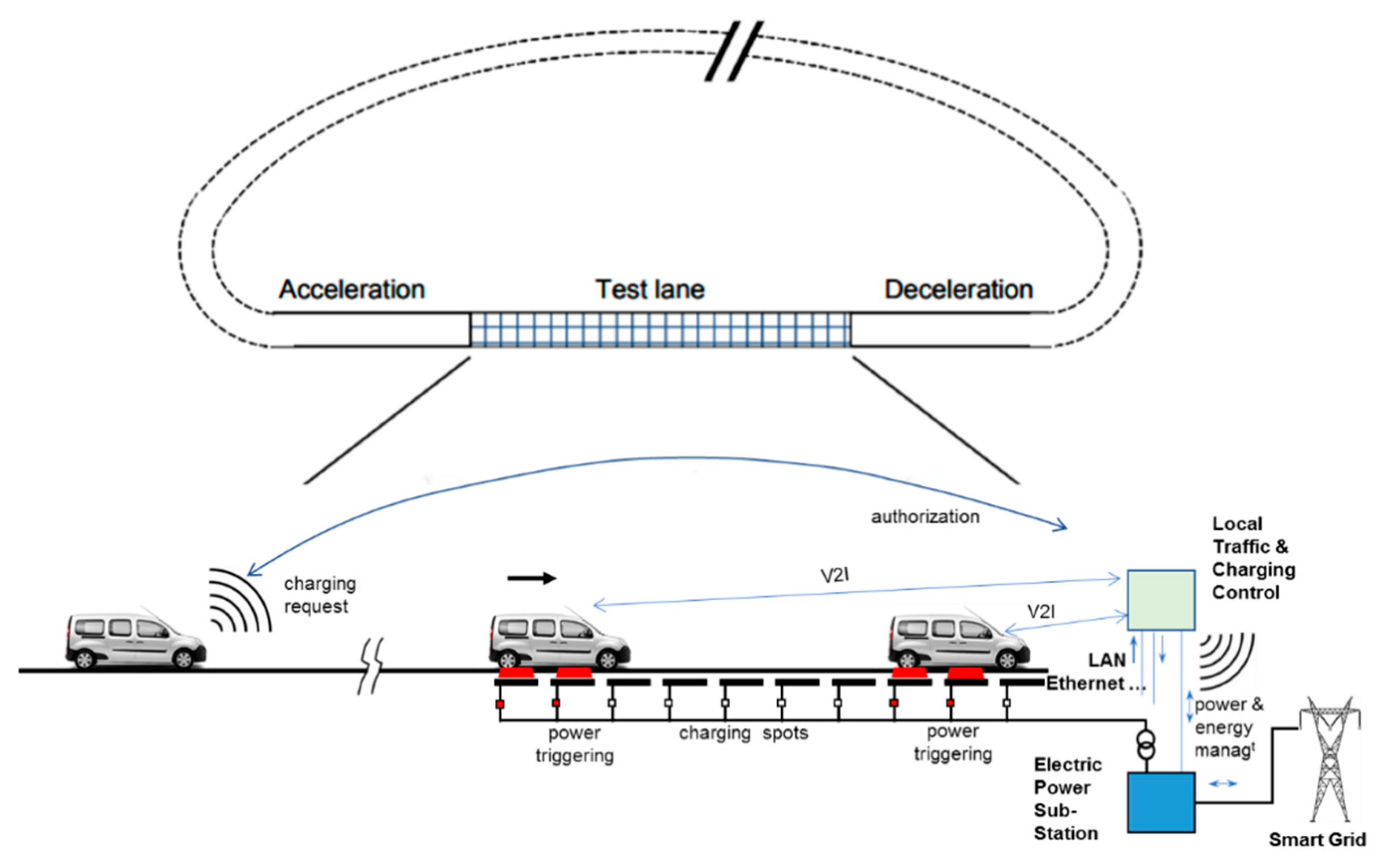
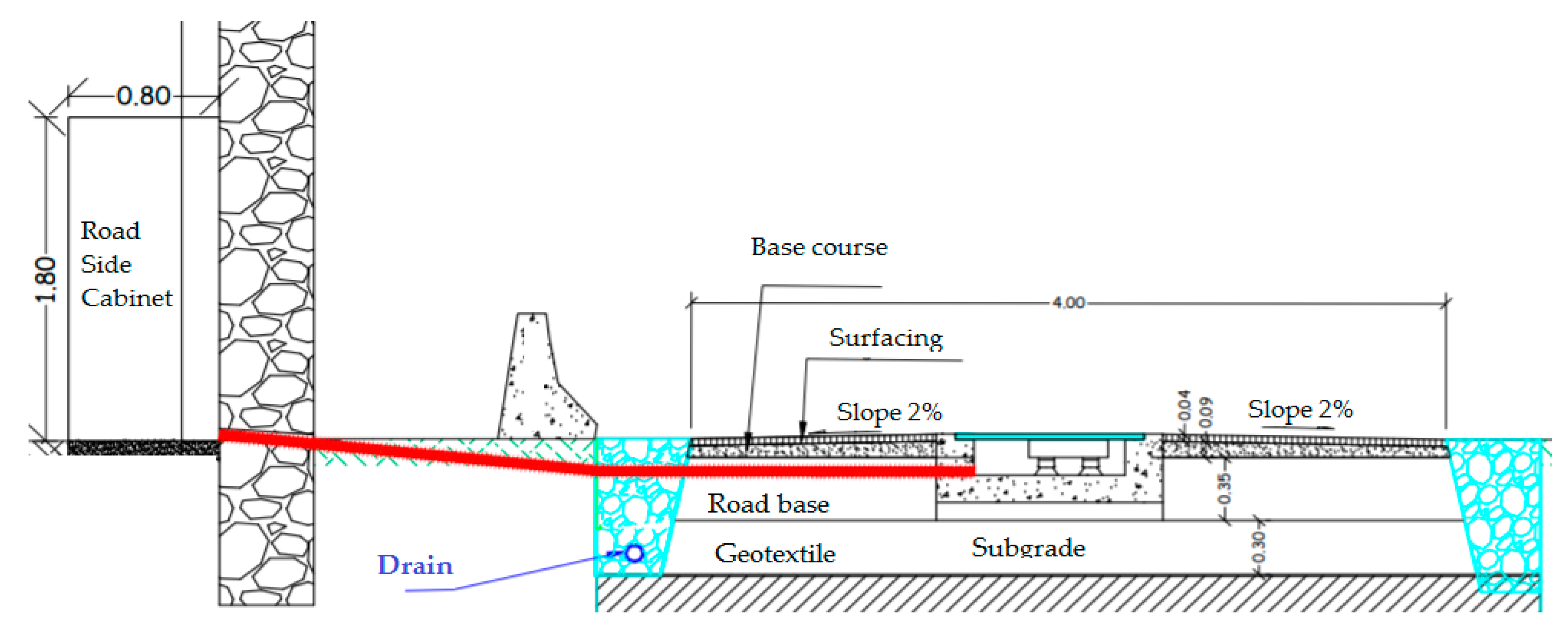
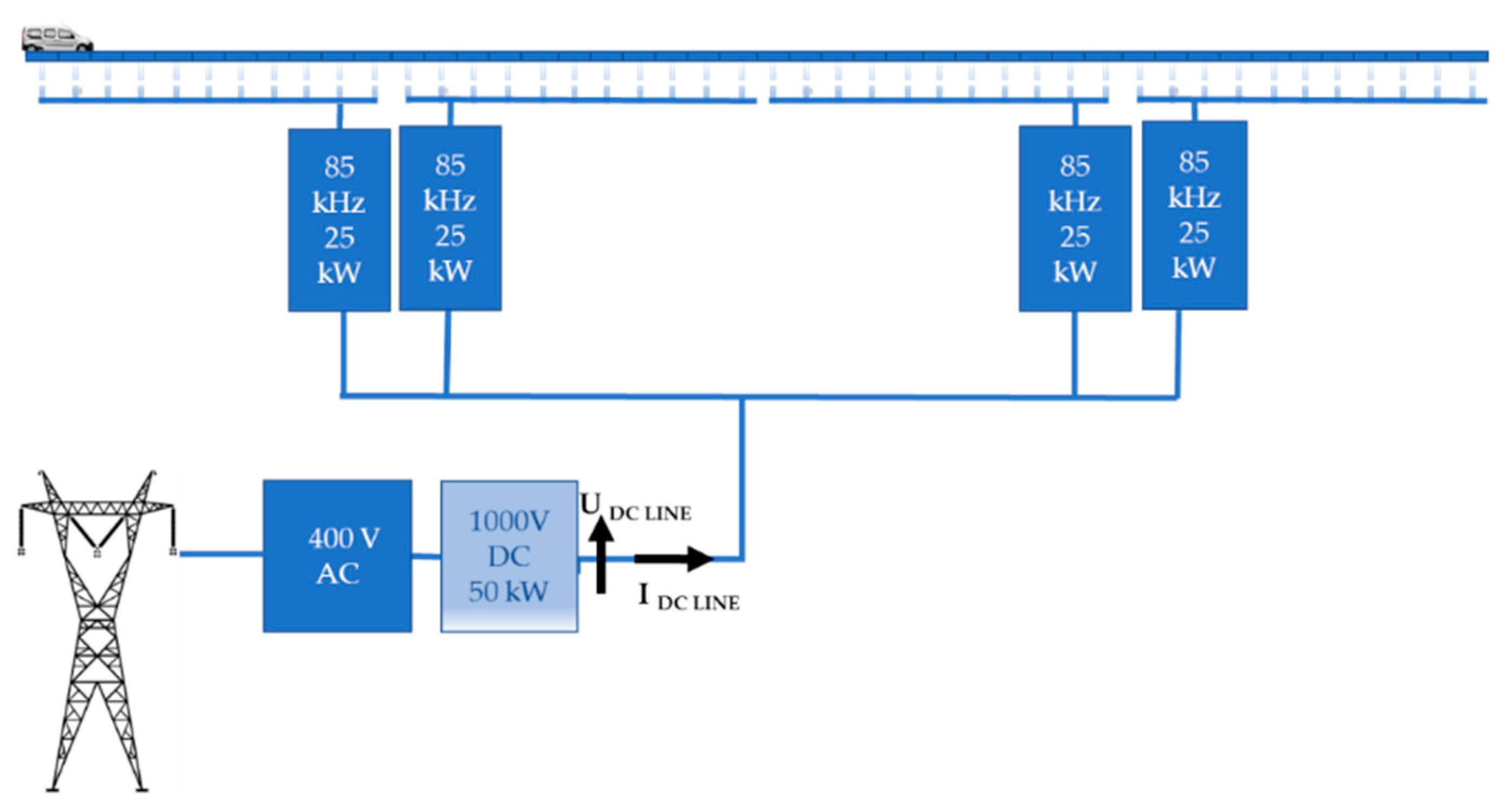
3.1. Road Infrastructure
3.2. Electric Infrastructure Integrated with the Dynamic IPT System and Additional Equipement
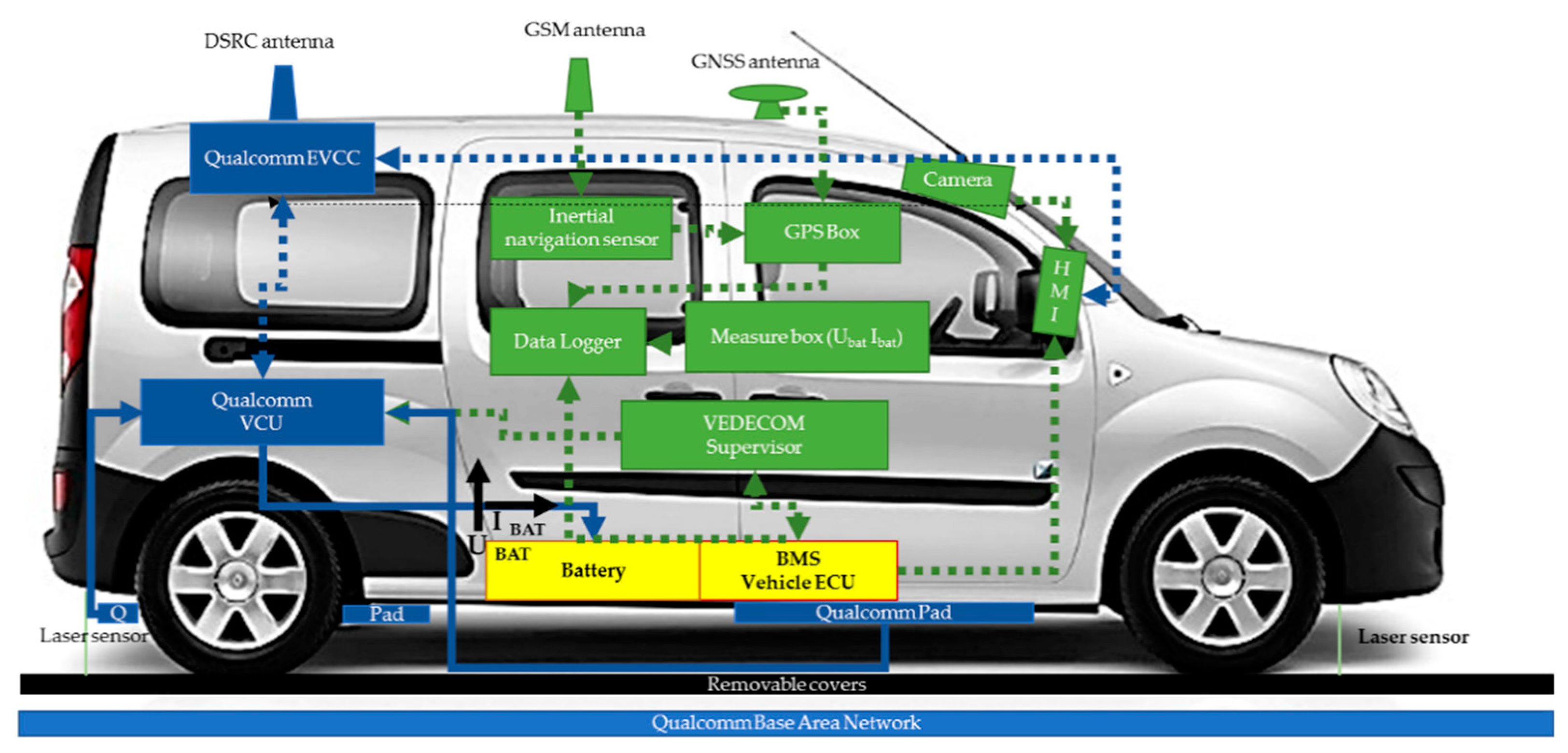
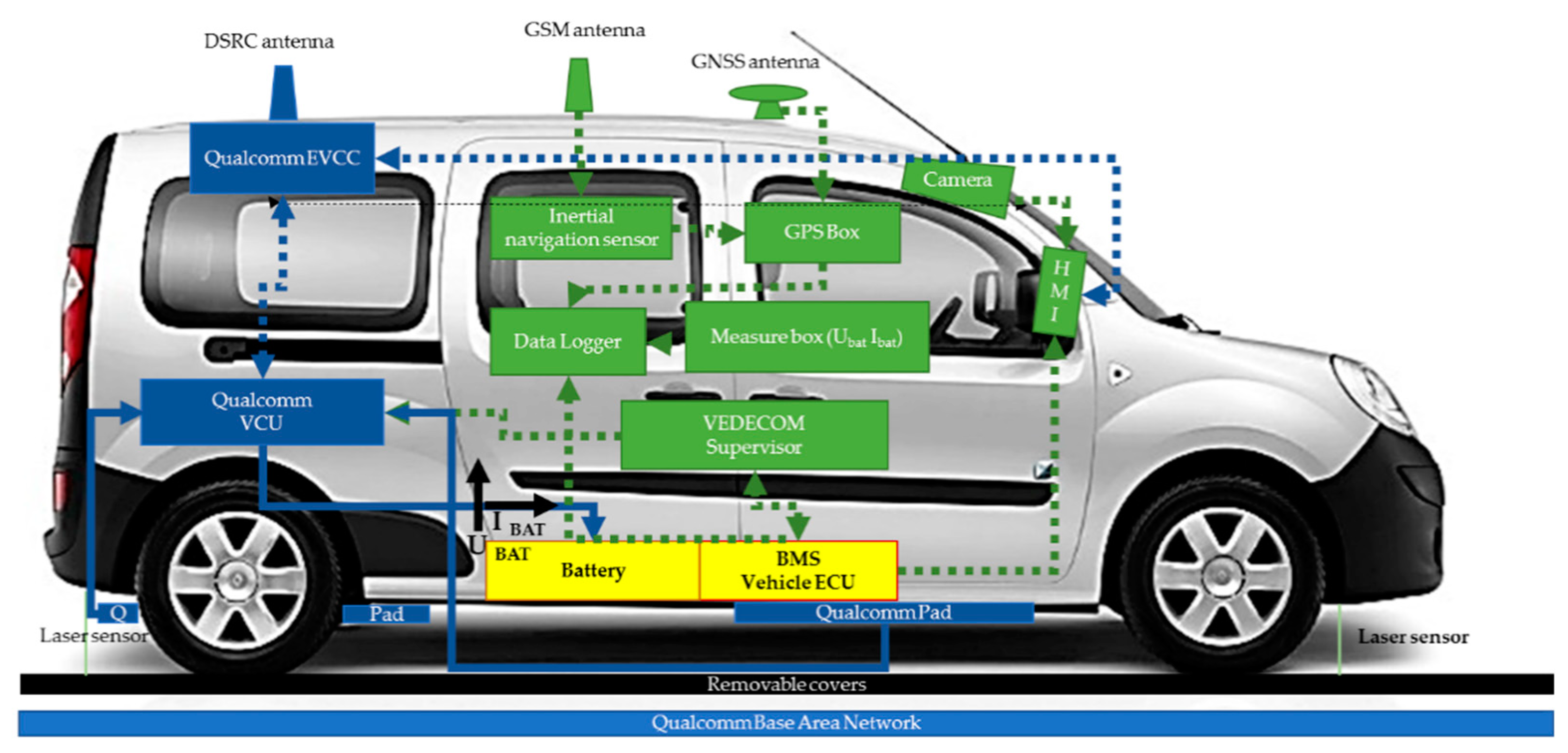
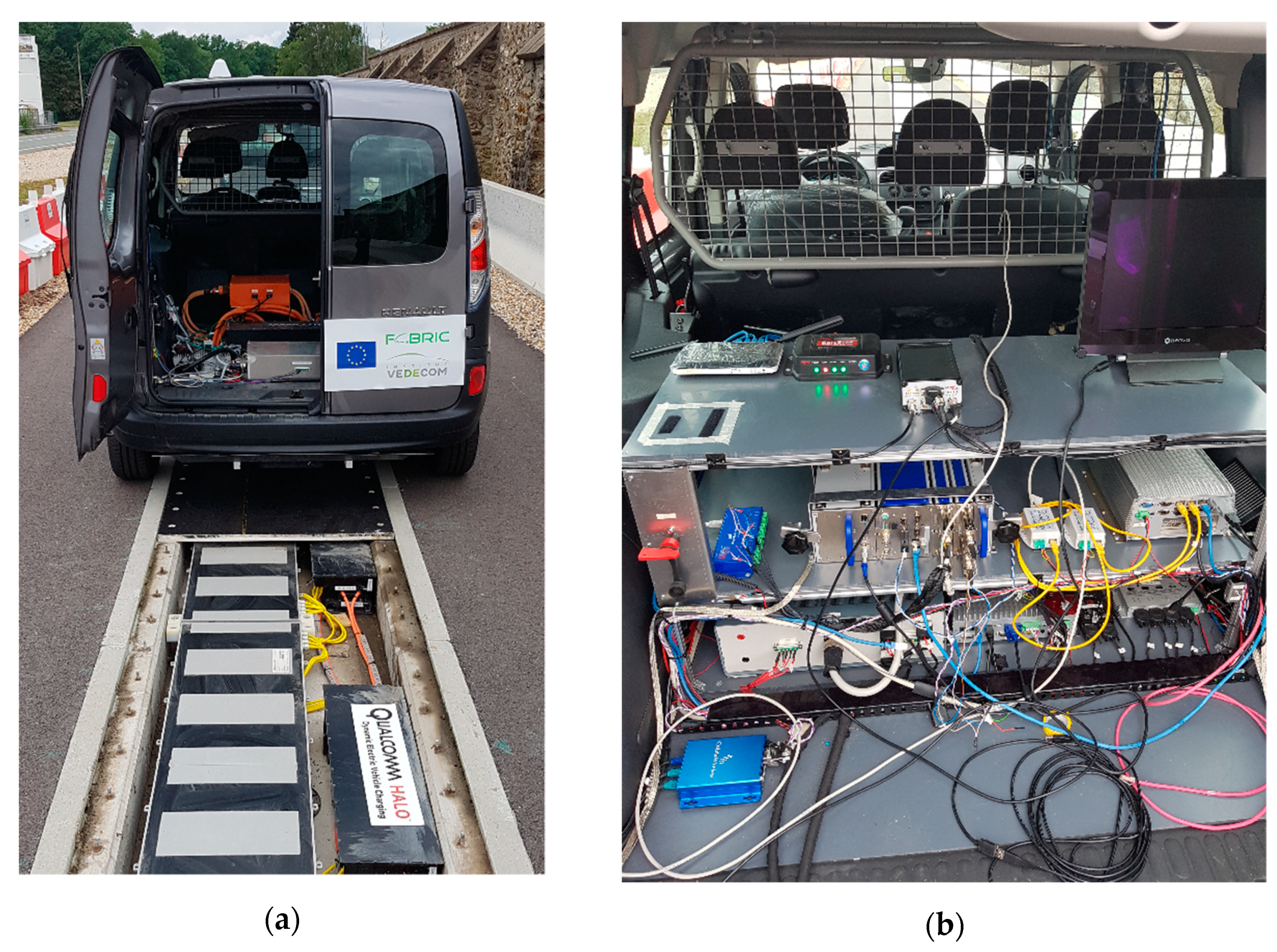
3.3. Serial Vehicle Implemented with Dynamic IPT System and Additional Equipment
- electric measurements (charging current and battery voltage in the measure box)
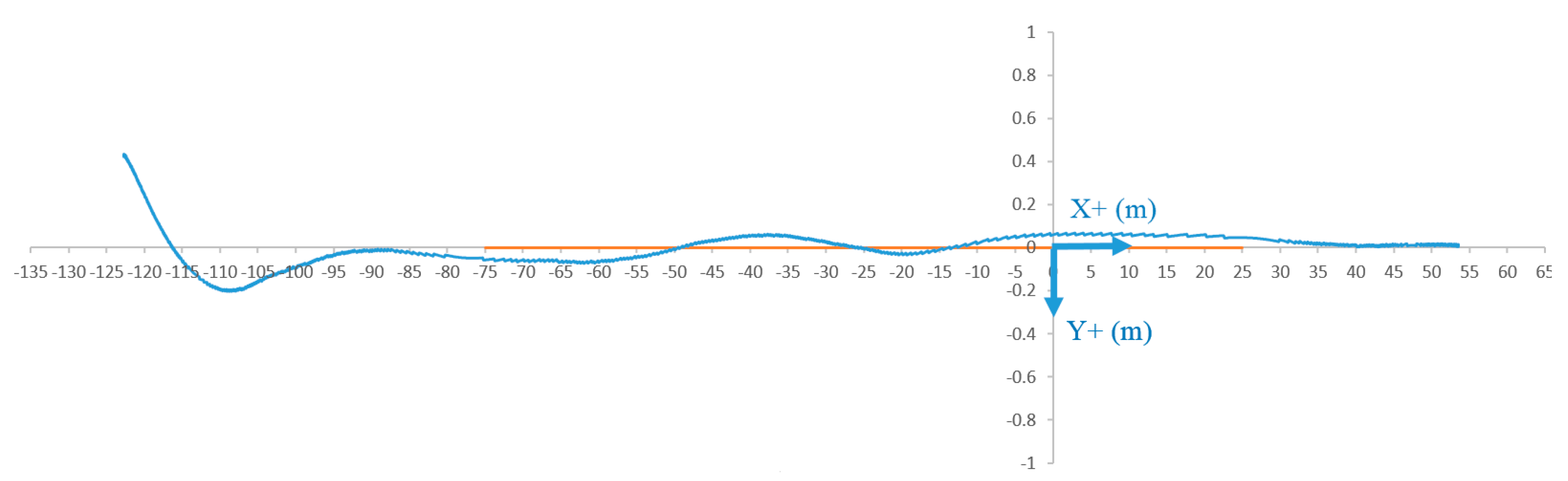
- misalignment measurements (through data generated by a Global Positioning System (GPS) enhanced by a Real Time Kinematic (RTK) system including inertial navigation sensors)
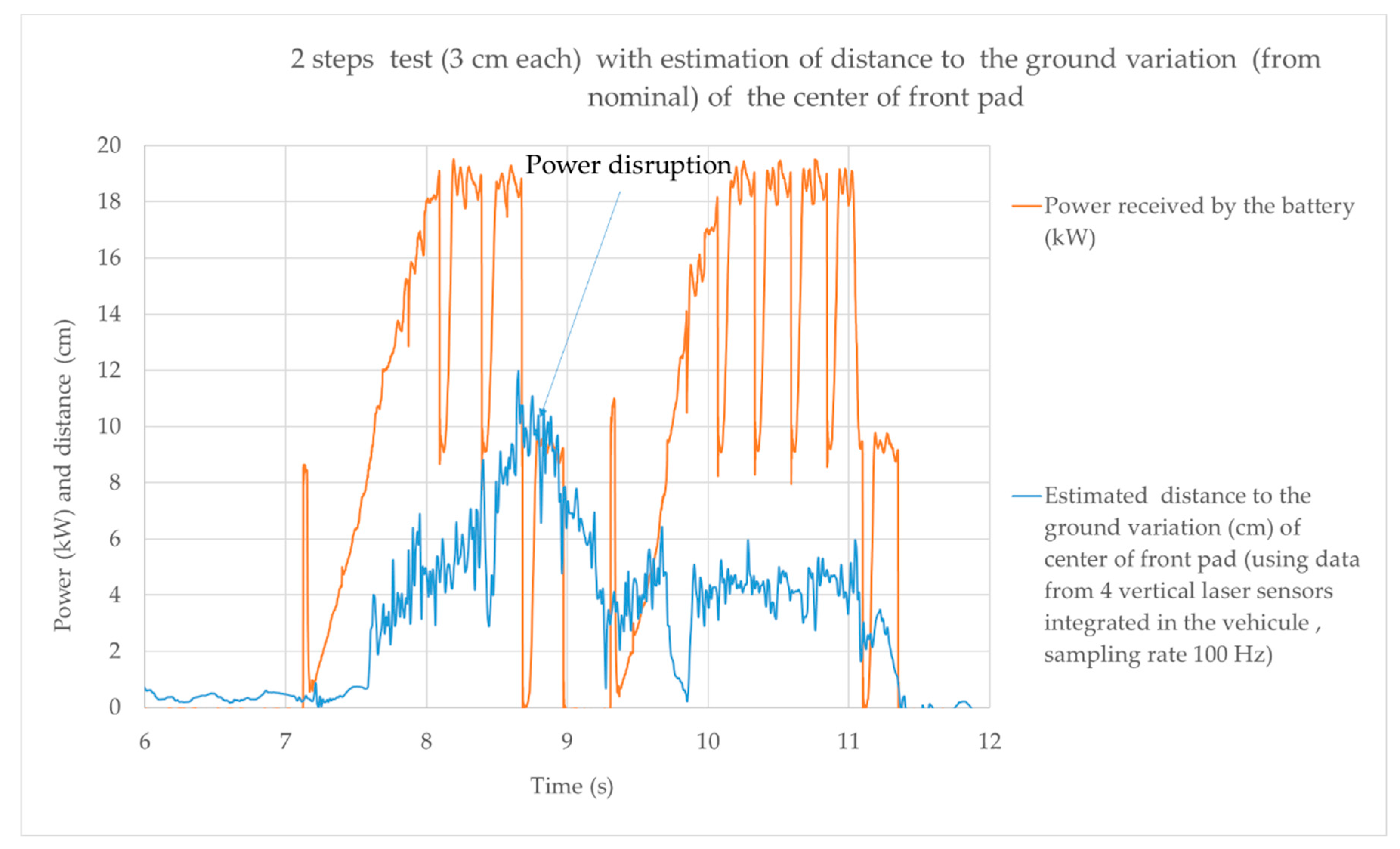
- air gap measurements (using four vertical laser sensors)
3.4. Vehicle Verifications w/r External Power Source
3.5. Validation of the Integrated Vehicule and Infrastructure Methodology
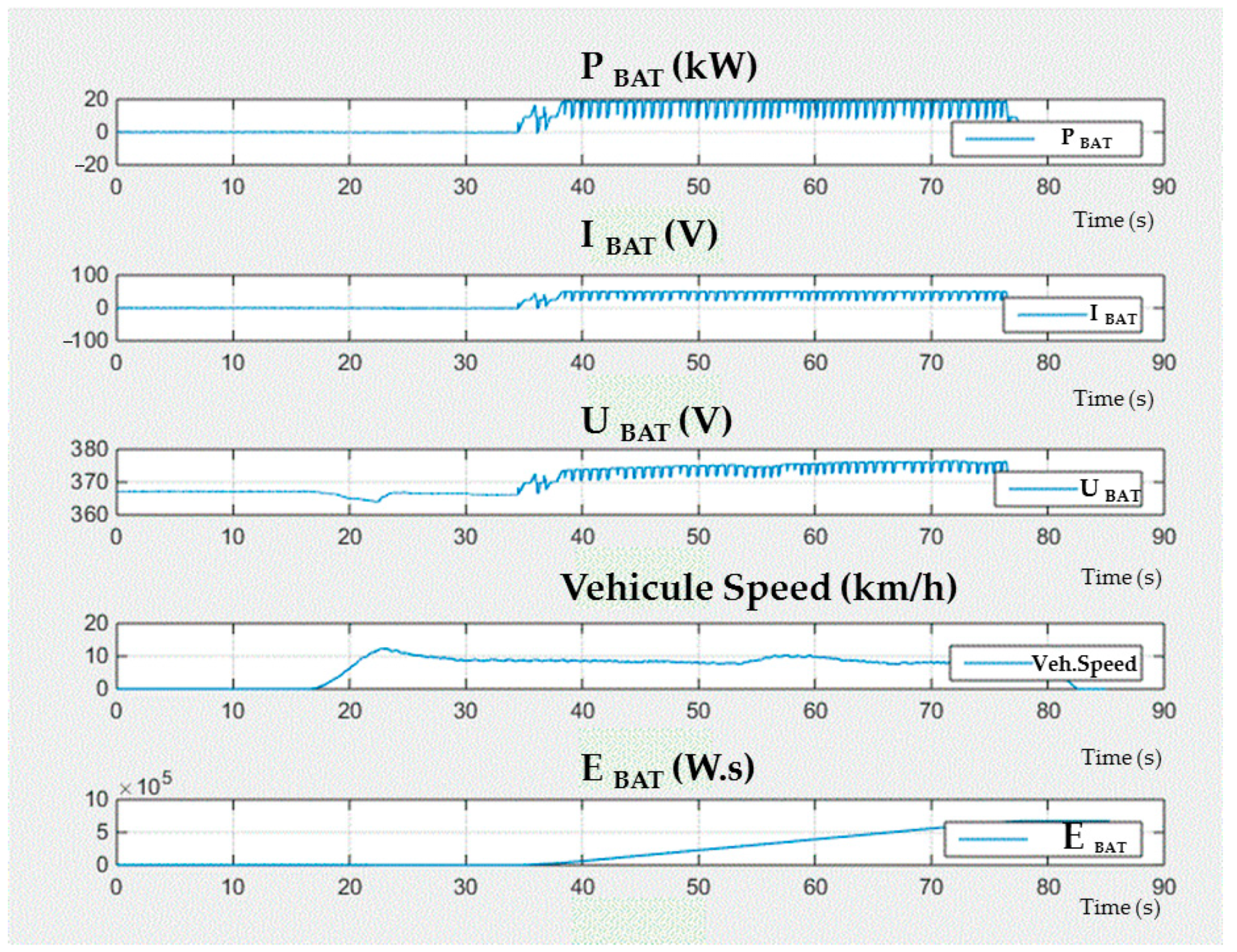
3.5.1. Battery Voltage and Current Shapes Visualization
3.5.2. Dynamic IPT System Efficiency
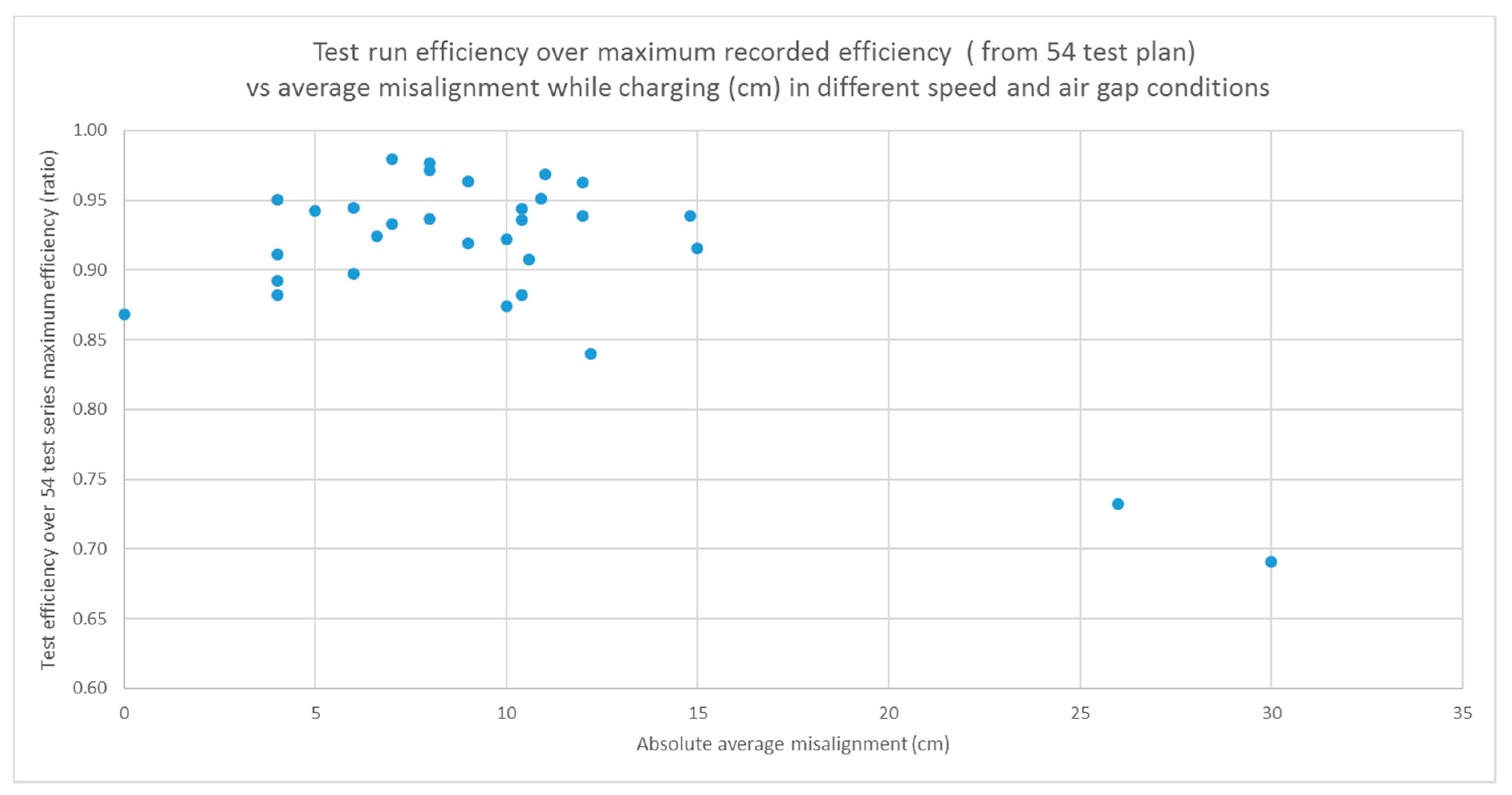
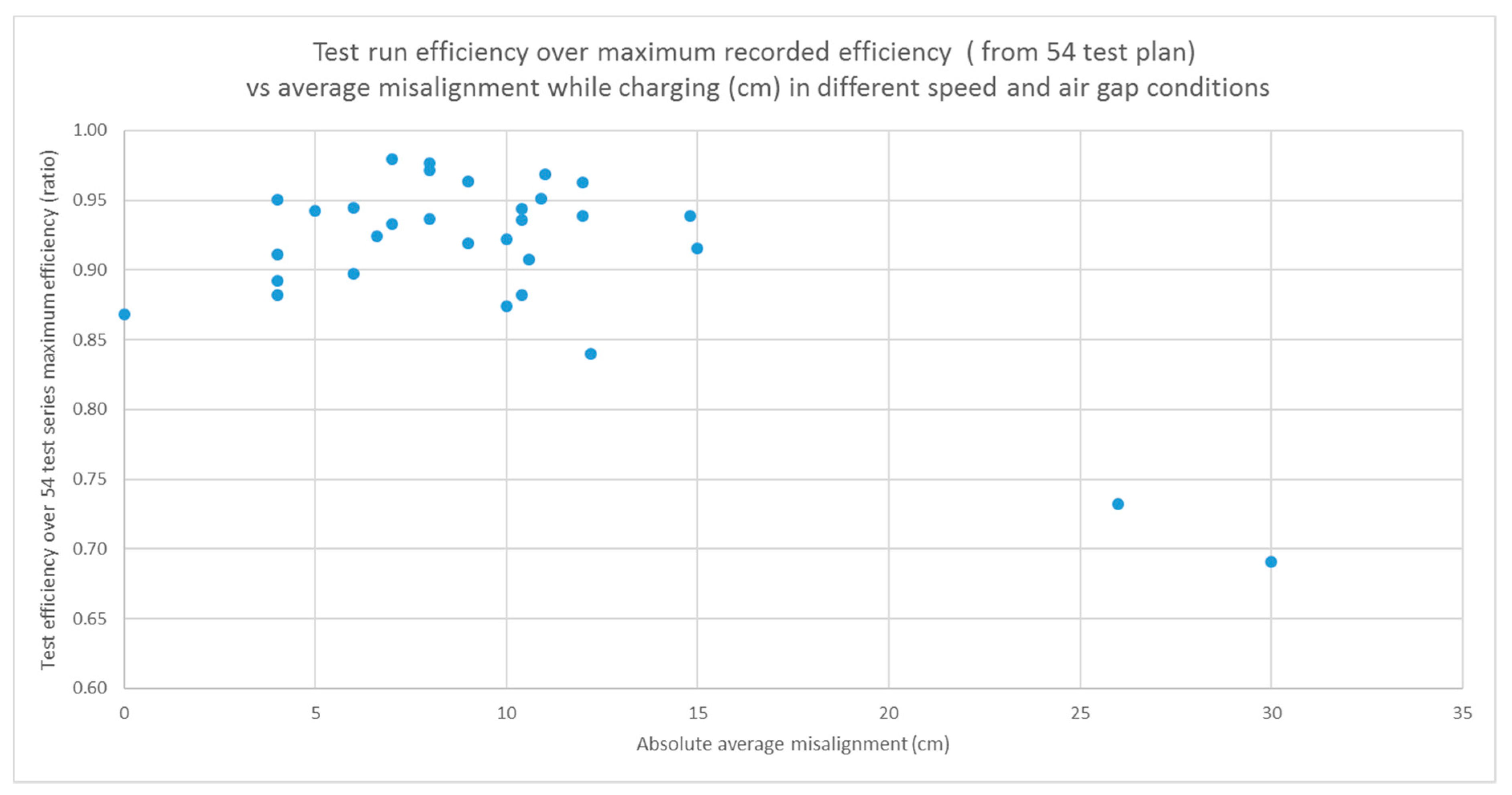
3.5.3. Influence Factors Impact on Efficiency
- Misalignment (three targets: no misalignment, light right misalignment and light left misalignment; the driving objective was to remain in the functioning range of ±20 cm)
- Air gap (three levels: nominal 175 mm, and two other levels close to the limits of the functional range of ±25 mm)
- Speed (three levels: 20, 50 and 70 km/h).
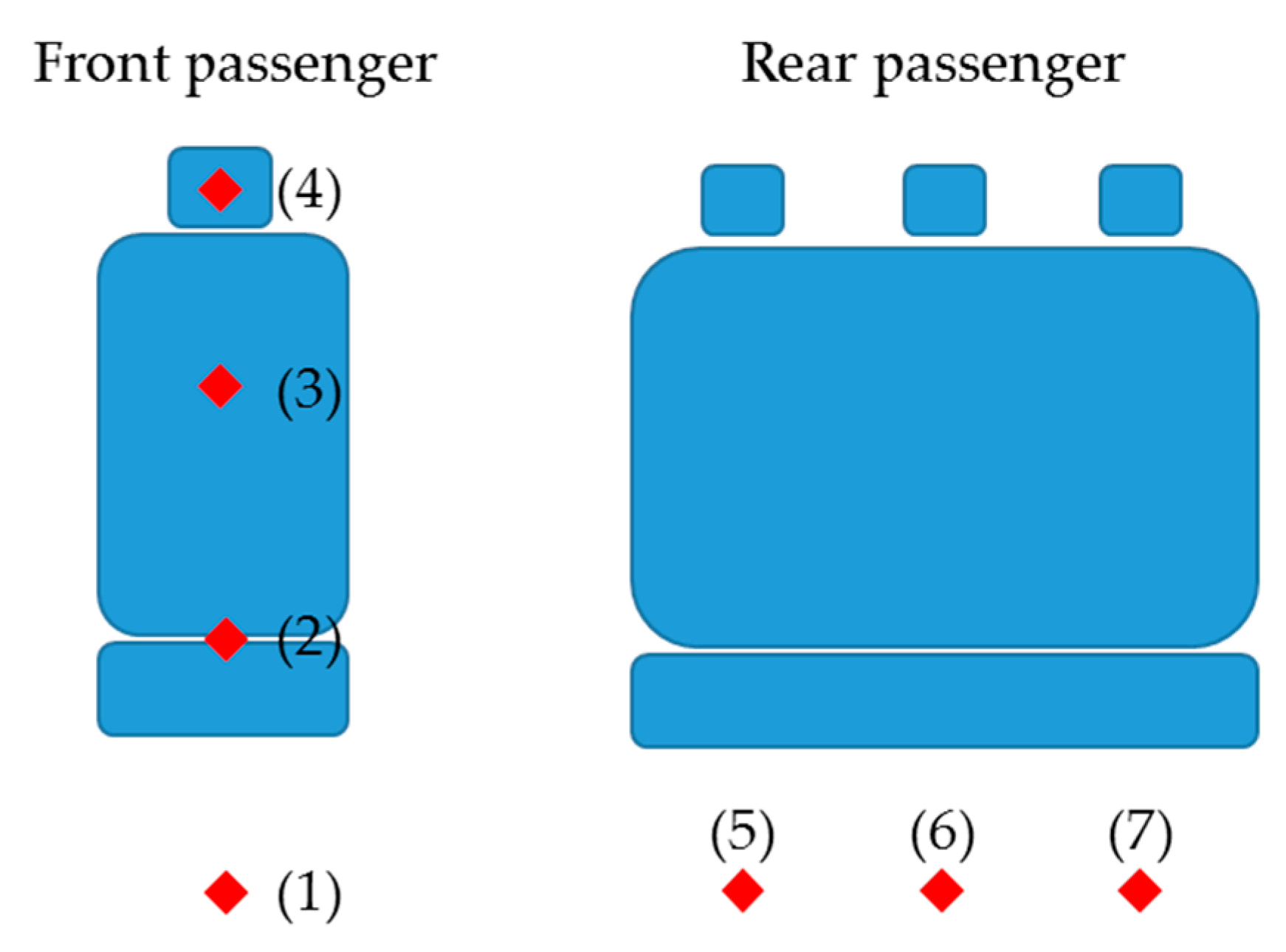
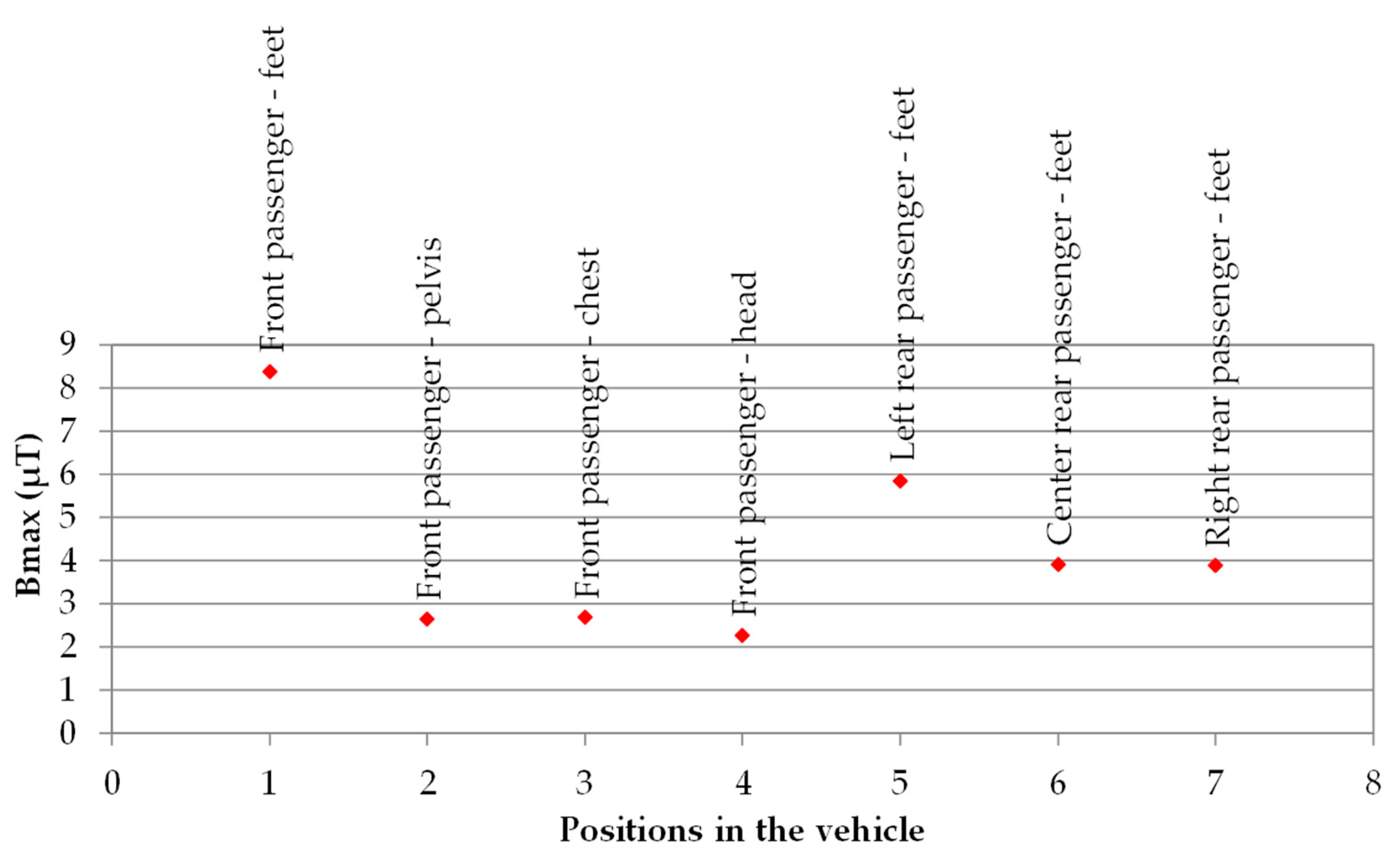
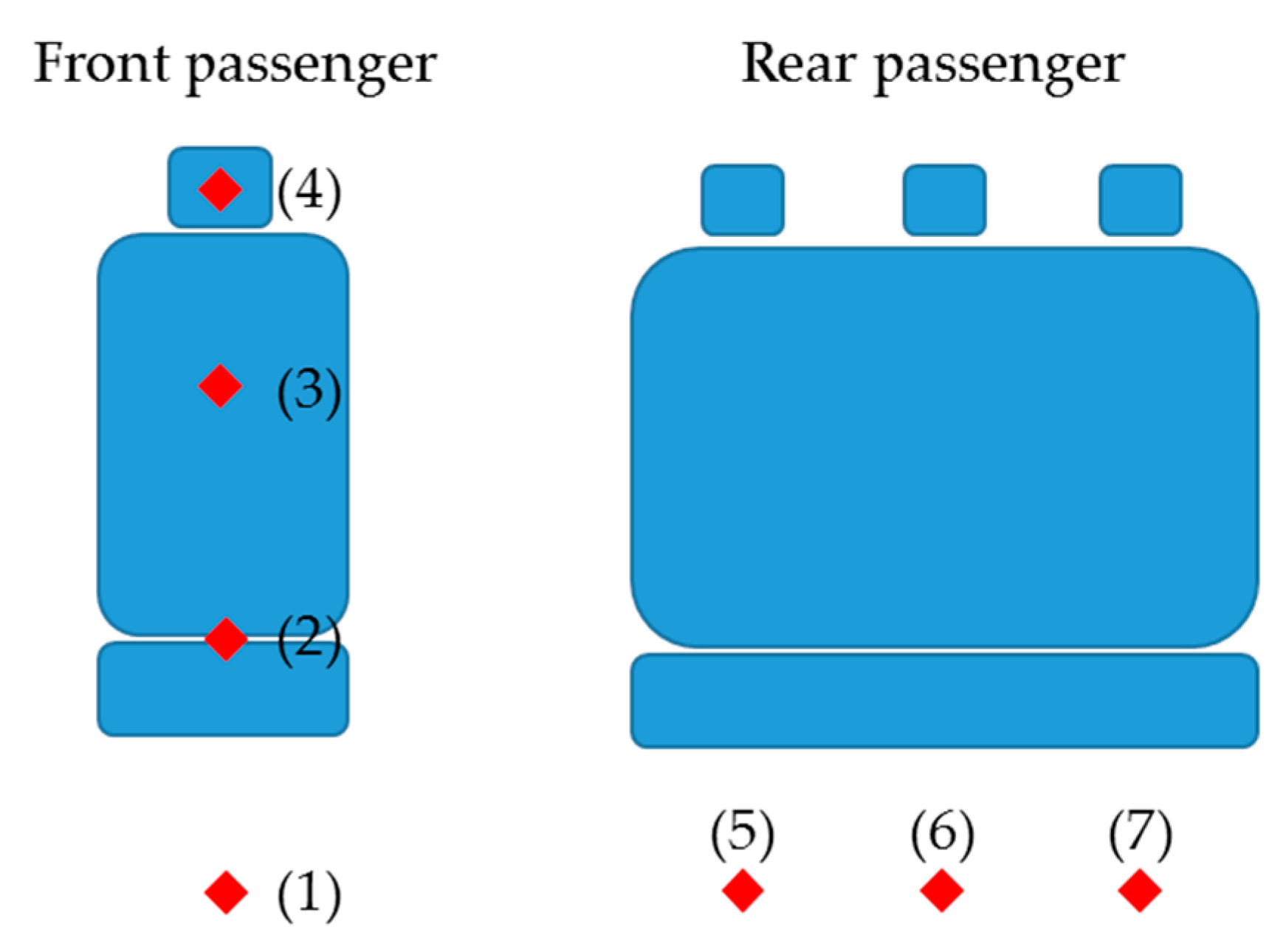
3.5.4. EMF Assessment Inside and Outside of the Vehicle
3.5.5. Additional FABRIC Validation Methodologies
- -
- Grid impact measurements
- -
- ICT functions (mainly for HMI and Lane-Keeping Assistant (LKA) validation).
3.6. Additional System Characterizations Methodologies
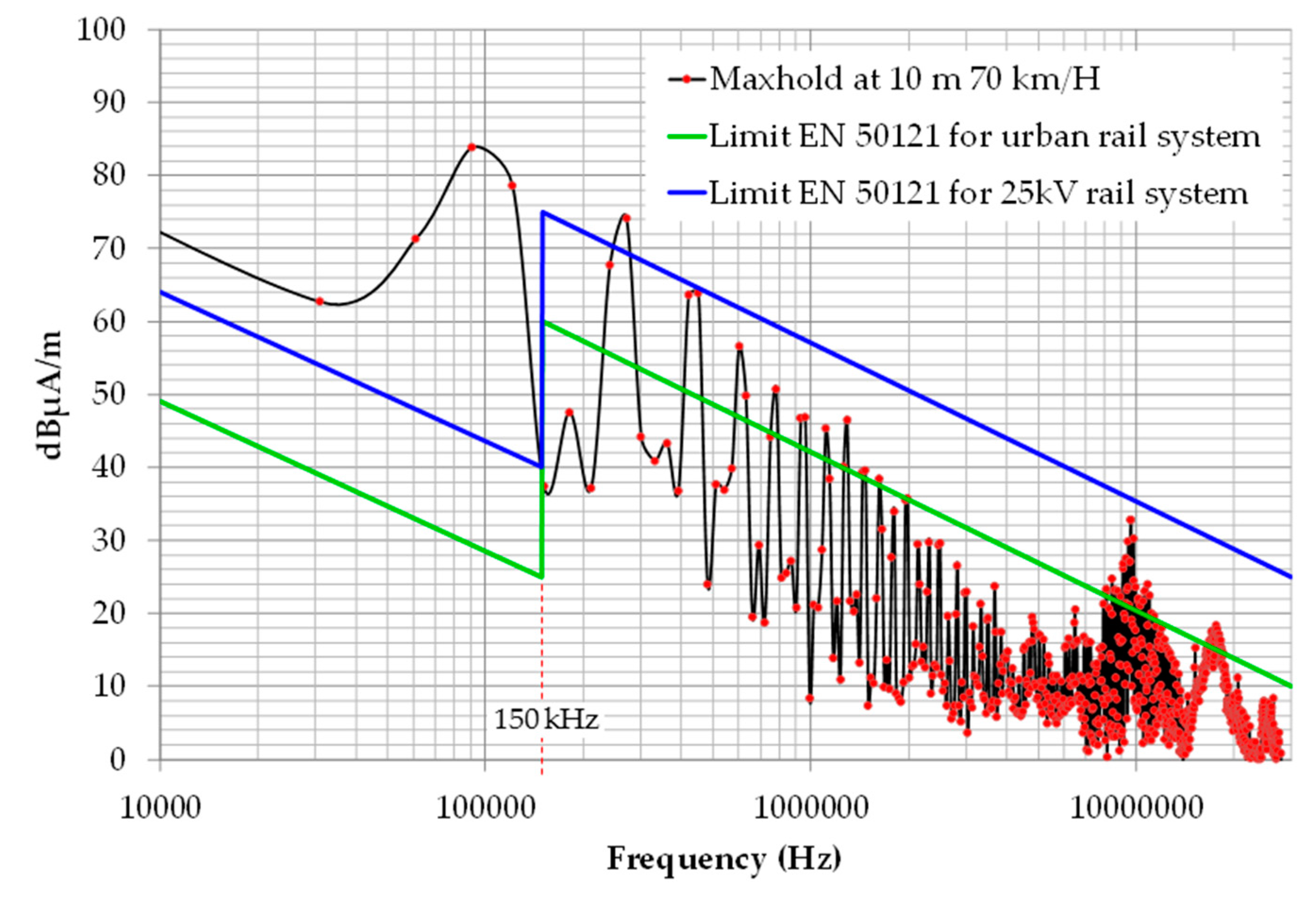
3.6.1. Radiated Emissions
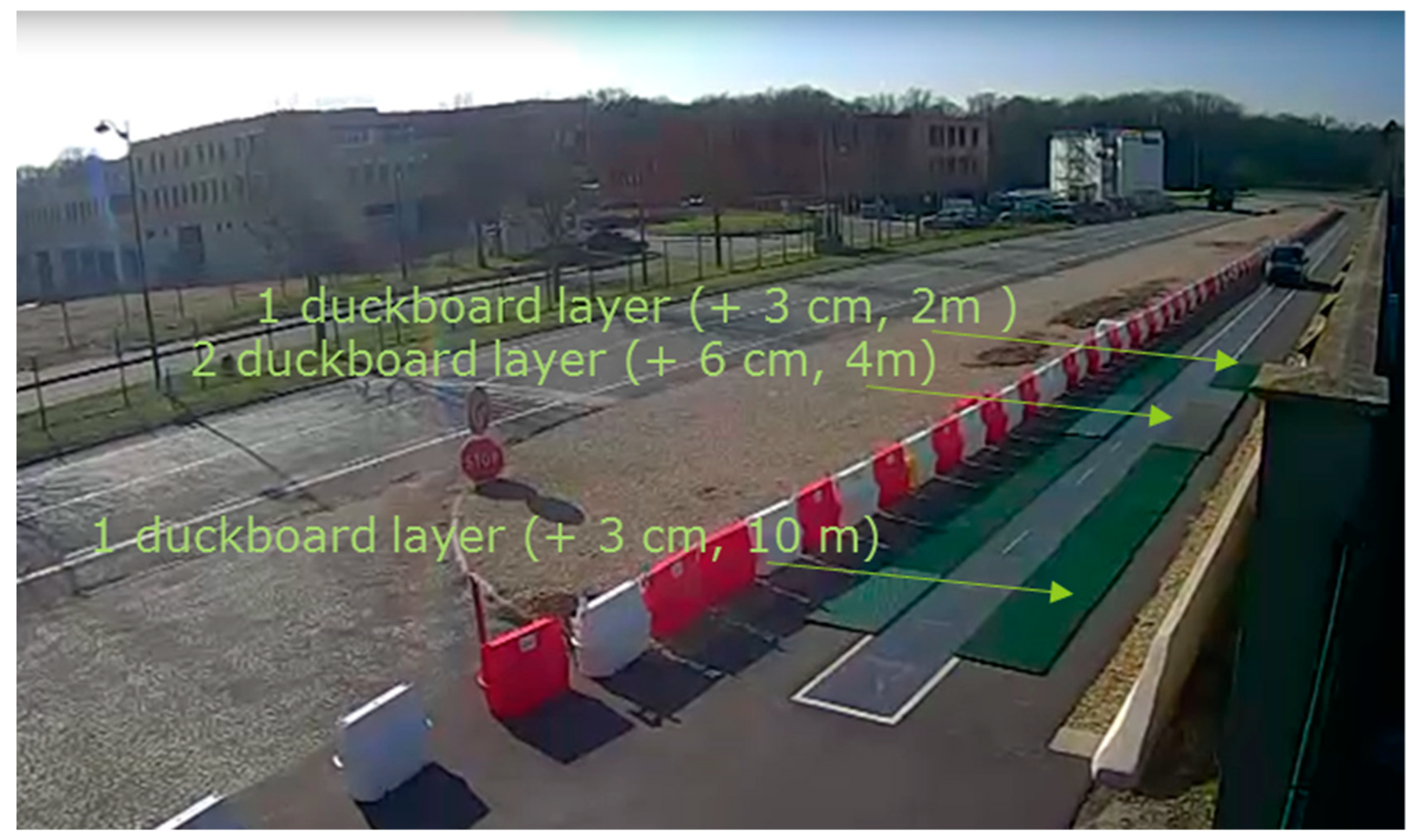
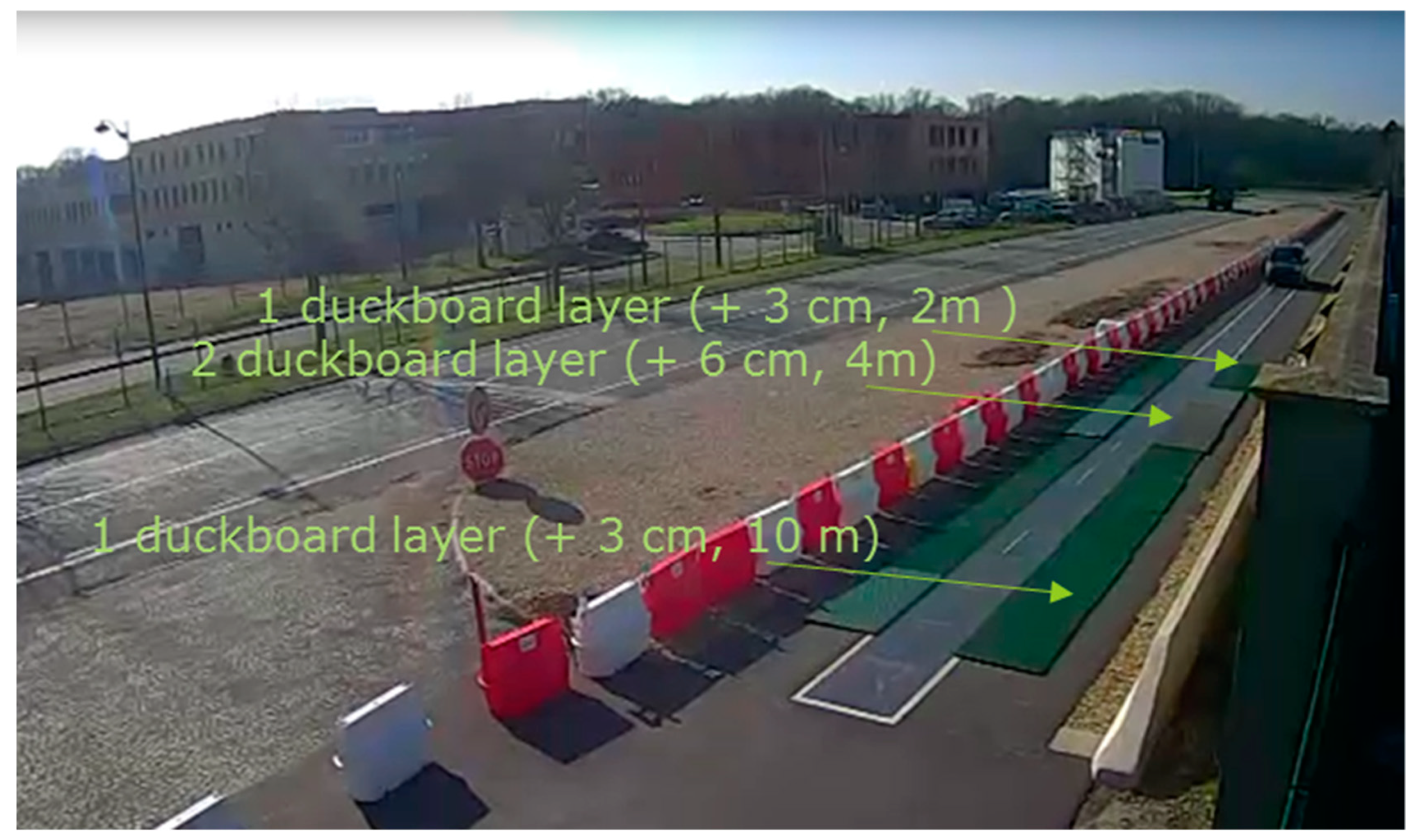
3.6.2. Impact of a Dynamic Air Gap Variation on Charge Performance Evaluation Methodology
4. Public Demonstrations, Validation Result and Discussions
4.1. Public Demonstrations
- at different power levels up to 20 kW
- from 0 up to 100 km/h speed
- with two prototype cars
- according to the different FABRIC use cases (stationary …)
4.2. Main Validation Results
4.2.1. Battery Voltage and Current Shapes
- -
- Regenerative braking improves cycle life
- -
- Cycle depth is a dominant factor for cycle life and battery degradation.
4.2.2. Dynamic IPT System Efficiency
4.2.3. Influence Factors Impact on Efficiency
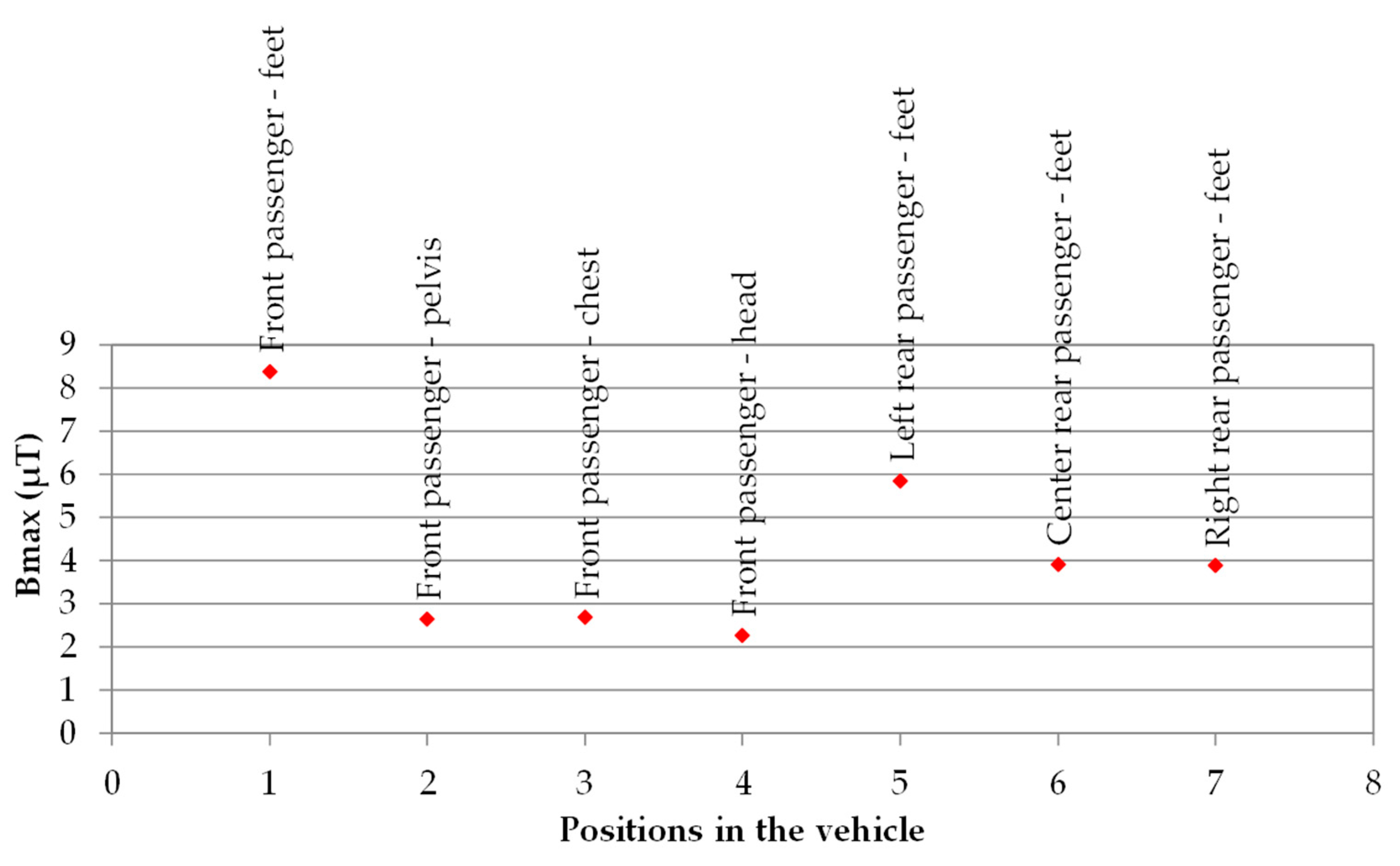
4.2.4. EMF Assessment Inside and Outside of the Vehicle
4.2.5. Additional FABRIC Validation Results
4.3. Additional System Characterizations Result
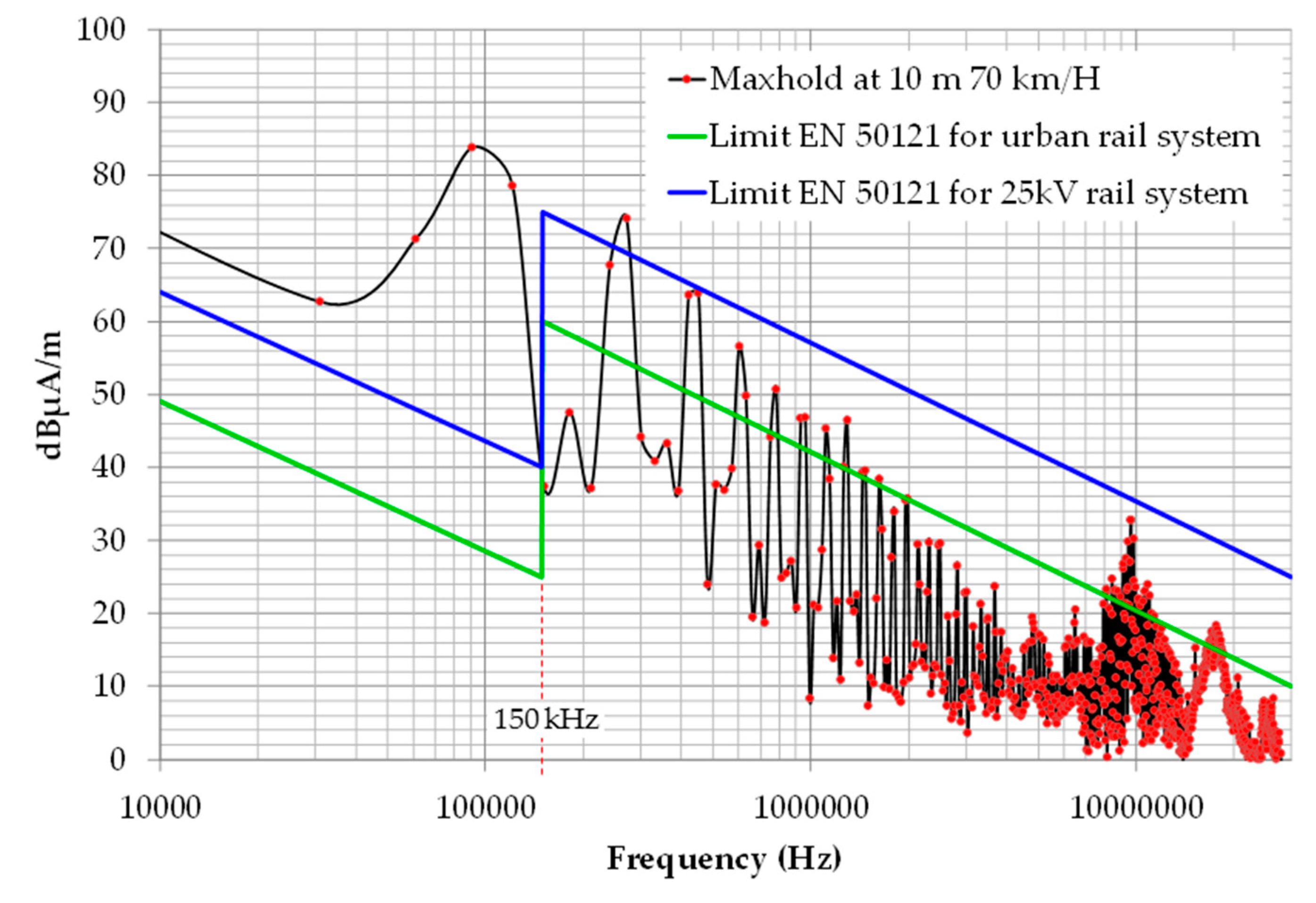
4.3.1. Radiated Emissions
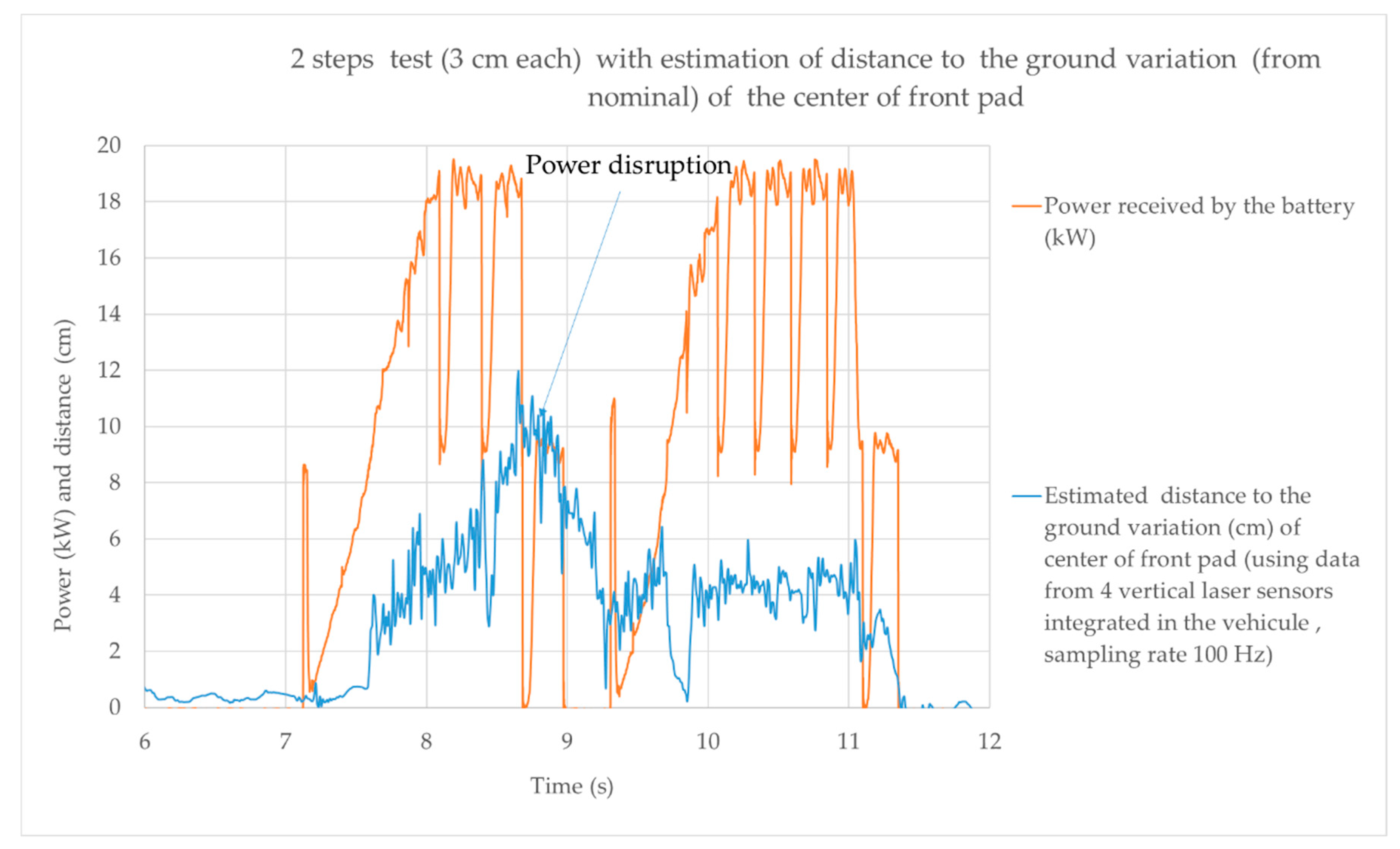
4.3.2. Impact of a Dynamic Air Gap Variation on Charge Performance
5. Conclusions
5.1. Demonstrations and Experimental Characterizations in Real Conditions
- power levels (20 kW)
- charging speeds (from 0 to 100 km/h)
- number of vehicles dynamically chargeable on the track (up to two).
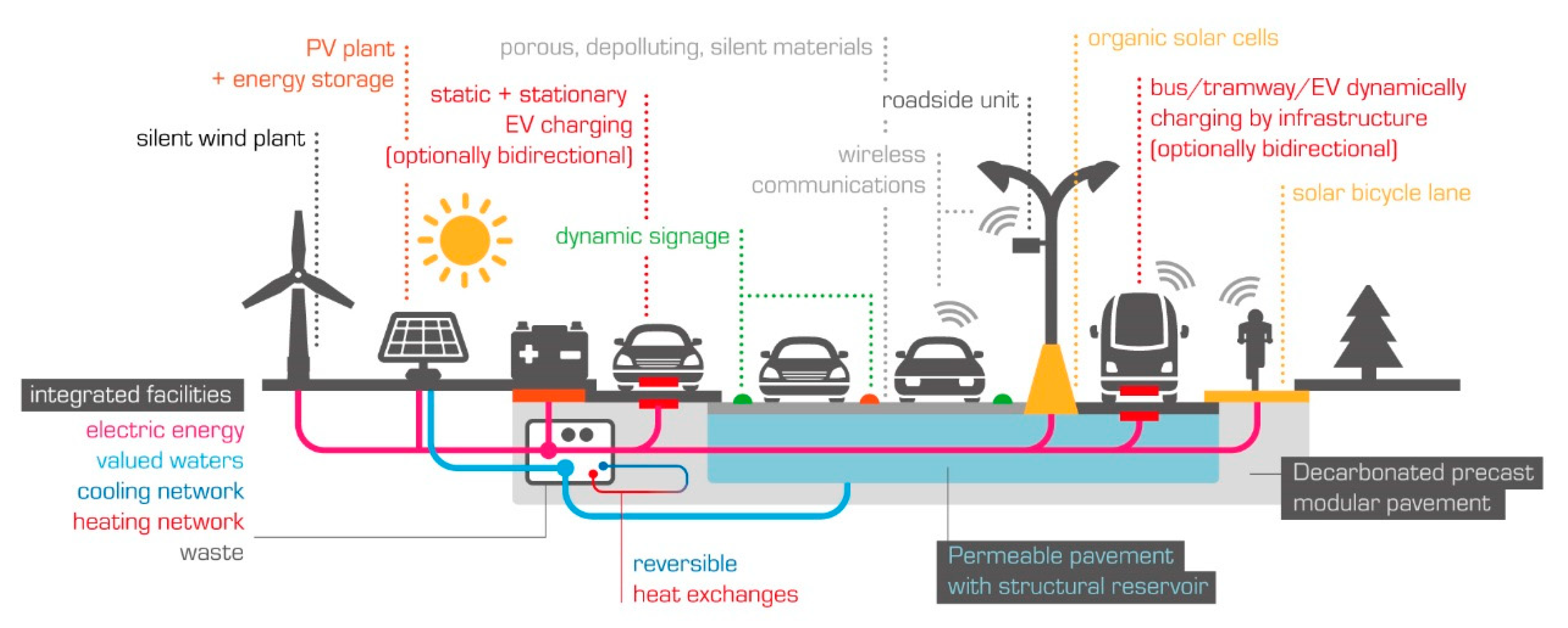
5.2. Prospectives
- EVs have the lowest speed and consumption, which implies a higher potential for additional autonomy per km of charge while driving
- Pressure to ban ICE engines is very high in urban centers
- Land prices make charging infrastructure implantation costs very high
- The density of power supply equipment potentially available is important. Capacities from existing metro and tram electric utilities could support part of the dynamic IPT charging infrastructure deployment.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Glossary
| BMS | Battery Management System |
| CAEV | Connected Autonomous Electric Vehicles |
| DC/AC | Direct Current/Alternative Current |
| DSRC | Direct Short-Range Communication |
| DWPT | Dynamic Wireless Power Transfer |
| ECU | Electric Control Unit |
| EM | Electromagnetic |
| EMC | Electromagnetic Compatibility |
| EMF | Electromagnetic Field |
| ERS | Electric Road Systems |
| EV | Electric Vehicle |
| EVB | Electric Vehicle Batteries |
| EVCC | Electric Vehicle Communication Controller |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| GSM | Global System for Mobile |
| HDV | High Duty Vehicles |
| HMI | Human Machine Interface |
| ICE | Internal Combustion Engine |
| ICNIRP | International Commission on Non-Ionizing Radiation Protection |
| ICT | Information and Communication Technology |
| IEA | International Energy Agency |
| IFSTTAR | Institut Français des Sciences et Technologies des Transports, de l’Aménagement et des Réseaux |
| IPT | Inductive Power Transfer |
| LKA | Lane Keeping Assistant |
| RBW | Resolution Bandwidth |
| RPEV | Roadway Powered Electric Vehicle |
| RTK | Real-Time Kinematic |
| SOC | State of Charge |
| TRL | Technology Readiness Level |
| VCU | Vehicle Charge Unit |
| VRU | Vulnerable Road Users |
| WPT | Wireless Power Transfer |
References
- Global EV Outlook 2018. Available online: https://webstore.iea.org/global-ev-outlook-2018 (accessed on 6 November 2019).
- Open Charge Map. Available online: https://openchargemap.org/site/ (accessed on 30 September 2019).
- Zoe Voiture Citadine Electrique Renault. Available online: https://www.renault.fr/vehicules/vehicules-electriques/nouvelle-zoe.html (accessed on 6 November 2019).
- Clio Voiture Citadine Renault. Available online: https://www.renault.fr/vehicules/vehicules-particuliers/nouvelle-clio.html (accessed on 6 November 2019).
- Tongur, S.; Sundelin, H. The Electric Road System. In Proceedings of the Asian Conference on Energy, Power and Transportation Electrification (ACEPT), Singapore, 25–27 October 2016; IEEE: Piscataway, NY, USA, 2016. [Google Scholar]
- California EHighway Demonstration Uses Overhead Lines to Charge Trucks en Route. Available online: https://chargedevs.com/newswire/california-ehighway-demonstration-uses-overhead-lines-to-charge-trucks-en-route/ (accessed on 30 September 2019).
- Electrified Road in Sweden for Charging Moving Cars. Available online: https://www.youtube.com/watch?v=YjAlsxUOGzQ (accessed on 30 September 2019).
- IRENA-Innovation Outlook-Smart Charging for EV. Available online: https://www.irena.org/-/media/Files/IRENA/Agency/Publication/2019/May/IRENA_Innovation_Outlook_EV_smart_charging_2019.pdf (accessed on 6 November 2019).
- Suul, J.A.; Guidi, G. Overview and Electro-Technical Evaluation of the State-of-the-Art for Conductive and Inductive Power Transfer Technologies, SINTEF Energy Research Report 2018. Available online: https://www.sintef.no/globalassets/project/elingo/18-0733---rapport-3---technology-for-dynamic-on-road----6-til-nett.pdf (accessed on 30 September 2019).
- Zhao, H.; Wang, Q.; Fulton, L.; Jaller, M.; Burke, A. A Comparison of Zero-Emission Highway Trucking Technologies; UC Office of the President, University of California Institute of Transportation Studies: Berkeley, CA, USA, 2018; Available online: https://escholarship.org/uc/item/1584b5z9 (accessed on 8 November 2019).
- Shekhar, A.; Prasanth, V.; Bauer, P.; Bolech, M. Economic Viability Study of an On-Road Wireless Charging System with a Generic Driving Range Estimation Method. Energies 2016, 9, 76. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electr. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Cirimele, V.; Freschi, F.; Mitolo, M. Inductive power transfer for automotive, applications: State-of-the-art and future trends. In Proceedings of the 2016 IEEE Industry Applications Society Annual Meeting, Portland, OR, USA, 2–6 October 2016. [Google Scholar]
- Faraday, M. Experimental researches in electricity. Philos. Trans. R. Soc. Lond. 1832, 122, 125–162. [Google Scholar]
- Cichon, D.J.; Wiesbeck, W. The Heinrich Hertz wireless experiments at Karlsruhe in the view of modern communication. In Proceedings of the 1995 International Conference on 100 Years of Radio, London, UK, 5–7 September 1995; pp. 1–6. [Google Scholar]
- Tesla, N. The transmission of electrical energy without wires. In Electrical World and Engineer; McGraw Publishing Company: New York, NY, USA, 1904; Volume 1. [Google Scholar]
- Grant, A.; Covic, G.C.; John, T.; Boys, J.B. Inductive Power Transfer. Proc. IEEE 2013, 101, 1276–1289. [Google Scholar]
- Jawad, A.M.; Nordin, R.; Gharghan, S.K.; Jawad, H.M.; Ismail, M. Opportunities and Challenges for Near-Field Wireless Power Transfer: A Review. Energies 2017, 10, 1022. [Google Scholar] [CrossRef]
- Houran, M.A.; Xu, Y.; Chen, W. Magnetically Coupled Resonance WPT: Review of Compensation Topologies, Resonator Structures with Misalignment, and EMI Diagnostics. Electronics 2018, 11, 296. [Google Scholar] [CrossRef]
- Tesla, N. Apparatus for Transmission of Electrical Energy. U.S. Patent 649,621, 15 May 1900. Available online: https://www.google.com/patents/US649621 (accessed on 6 November 2019).
- Tesla, N. Telegraph and Telephone Age. In World System of Wireless Transmission of Energy; Twenty First Century Books: Breckenridge, CO, USA, 1927. [Google Scholar]
- Al-Saadi, M.; Al-Gizi, A.G.; Al-Chlaihawi, S.; Al-Omari, A.H. Inductive Power Transfer for Charging the Electric Vehicle Batteries, Inductive Power Transfer for Charging the Electric Vehicle Batteries. Electr. Electr. Autom. (EEA) 2018, 66, 29–39. [Google Scholar]
- Hutin, M.; Leblanc, M. Transformer System for Electric Railway, 23 October 1894. Available online: https://patents.google.com/patent/US527857A/en (accessed on 6 November 2019).
- Babat, G.I. Electrodeless discharges and some allied problems. J. Inst. Electr. Eng. Part III Radio Commun. Eng. 1947, 94, 27–37. [Google Scholar] [CrossRef]
- Jang, Y.J. Survey of the operation and system study on wireless charging electric vehicle systems. Transp. Res. Part C Emerg. Technol. 2018, 95, 844–864. [Google Scholar] [CrossRef]
- Brecher, A.; Arthur, D. Review and Evaluation of Wireless Power Transfer (WPT) for Electric Transit Applications (Report 0060); Technical Report; FTA Reports and Publication: New Jersey, NJ, USA, 2014. [Google Scholar]
- Panchal, C.; Stegen, S.; Lu, J. Review of static and dynamic wireless electric vehicle charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar] [CrossRef]
- Qiu, C.; Chau, K.T.; Liu, C.; Chan, C.C. Overview of Wireless Power Transfer for Electric Vehicle. In Proceedings of the EVS27 Conference, Barcelona, Spain, 17–20 November 2013. [Google Scholar]
- Systems Control Technology, Inc. Roadway Powered Electric Vehicle Project Track Construction and Testing Program Phase 3D; Partners for Advanced Transportation Technology; UC Berkeley: Berkeley, CA, USA, 1994; Available online: https://escholarship.org/uc/item/1jr98590 (accessed on 8 November 2019).
- Boys, J.T.; Green, A.W. Inductive Power Pick-Up Coils. WO Patent App. PCT/NZ1994/000,115, 27 April 1995. Available online: https://www.google.com/patents/WO1995011545A1?cl=en (accessed on 8 November 2019).
- Boys, J.T.; Green, A.W. Flux Concentrator for an Inductive Power Transfer System. U.S. Patent 5,821,638, 13 October 1998. Available online: https://www.google.com/patents/US5821638 (accessed on 8 November 2019).
- Wave Website. Available online: http://www.waveipt.com/ (accessed on 13 September 2017).
- Bombardier-Primove in Berlin. Available online: https://www.bombardier.com/fr/media/newsList/details.bt_20150901_-berlin-erste-hauptstadt-mit-kabellos-geladener-e-bu.bombardiercom.html (accessed on 8 November 2019).
- Suh, I. Application of shaped magnetic field in resonance (SMFIR) technology to future urban transportation. In Proceedings of the CIRP Design Conference: Interdisciplinary Design; KAIST: Daejeon, Korea, 2011; pp. 226–232. [Google Scholar]
- ORNL Surges Forward with 20-Kilowatt Wireless Charging for Electric Vehicles. Available online: https://www.youtube.com/watch?v=NP-SACM3jtQ (accessed on 13 September 2017).
- FABRIC EU PROJECT Final Event & Demonstration Video. Available online: https://www.youtube.com/watch?v=ngrJ60o06f8 (accessed on 30 September 2019).
- HaloIPT to Provide Induction Charging System for Phantom EE. Available online: http://www.greencarcongress.com/2011/03/haloipt-to-provide-induction-charging-system-for-phantom-ee.html (accessed on 13 September 2017).
- Carlson, R.W.; Normann, B. Test results of the plugless inductive charging system from evatran group, inc. SAE Int. J. Alt. Power. 2014, 3, 64–71. [Google Scholar] [CrossRef]
- BMW Wireless Charging. Car Charging in 3, 5 Hrs. without a Cable. Available online: https://www.youtube.com/watch?v=GlrcPrzuPMM (accessed on 8 November 2019).
- ISO 16290:2013. Available online: https://www.iso.org/fr/standard/56064.html (accessed on 8 November 2019).
- FABRIC EU PROJECT. Available online: https://www.fabric-project.eu (accessed on 30 September 2019).
- Laporte, S.; Coquery, G.; Révilloud, M.; Deniau, V. Experimental performance assessment of a dynamic wireless power transfer system for future EV in real driving conditions. In Proceedings of the e-Energy’18 9th International Conference on Future Energy System, Karlsruhe, Germany, 12–15 June 2018; pp. 570–578. [Google Scholar]
- International Telecommunication Union. Wireless Power Transmission Using Technologies Other than Radio Frequency Beam, Report ITU-R SM.2303-2, 06 2017. Available online: https://www.itu.int/dms_pub/itu-r/opb/rep/R-REP-SM.2303-2-2017-PDF-E.pdf (accessed on 8 November 2019).
- Revilloud, M.; Gruyer, D.; Rahal, M.C. A new multi-agent approach for lane detection and tracking. In Proceedings of the International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- FABRIC EU PROJECT/Deliverable/FABRIC_Validation_Methodology (D4.7.1). Available online: https://www.fabric-project.eu/www.fabric-project.eu/images/Deliverables/FABRIC_D4.7.1_V2_20171006_FABRIC_Validation_methodology_submitted.pdf (accessed on 30 September 2019).
- International Commission on Non-Ionizing Radiation Protection. Guidelines for limiting exposure to time-varying electric and magnetic fields (1Hz–100 kHz). Health Phys. 2010, 6, 818–836. [Google Scholar]
- Railway Applications—Electromagnetic Compatibility—Part 2: Emission of the Whole Railway System to the Outside World; CENELEC, EN 50121-2; International Electrotechnical Commission: Geneva, Switzerland, 2017.
- Dynamic Electric Vehicle Charging-Fully Charged. Available online: https://www.youtube.com/watch?v=2t0E4AcVu6o (accessed on 30 September 2019).
- Savoye, F.; Venet, P.; Pelissier, S.; Millet, M.; Groot, J. Impact of periodic current pulses on Li-ion batteries lifetime in vehicular application. Int. J. Electr. Hybrid Vehicles 2015, 7, 323–341. [Google Scholar] [CrossRef]
- Keil, P.; Jossen, A. Impact of Dynamic Driving Loads and Regenerative Braking on the Aging of Lithium-Ion Batteries in Electric Vehicles. J. Electrochem. Soc. 2017, 164, A3081–A3092. [Google Scholar] [CrossRef]
- Bessman, A.; Soares, R.; Wallmarkb, O.; Svensa, P.; Lindbergha, G. Aging effects of AC harmonics on lithium-ion cells. J. Energy Storage 2019, 21, 741–749. [Google Scholar] [CrossRef]
- Park, S. Evaluation of Electromagnetic Exposure during 85 kHz Wireless Power Transfer for Electric Vehicles. IEEE Trans. Magn. 2018, 54. [Google Scholar] [CrossRef]
- Zucca, M.; Bottauscio, O.; Harmon, S.; Guilizzoni, R.; Schilling, F.; Schmidt, M.; Ankarson, P.; Bergsten, T.; Tammi, K.; Sainio, P.; et al. Metrology for Inductive Charging of Electric Vehicles (MICEV). In Proceedings of the 2019 AEIT International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 2–4 July 2019. [Google Scholar]
- FABRIC EU PROJECT/Deliverable/Analysis of Deployment Scenarios, Standardization and Harmonization (D5.5.4). Available online: https://www.fabric-project.eu/images/Deliverables/FABRIC_D5.5.4_Deployment_and_Standard_Feb2018_submitted.pdf (accessed on 30 September 2019).
- FABRIC EU PROJECT/Deliverable/Interoperability Considerations (D33.3). Available online: https://www.fabric project.eu/images/Deliverables/FABRIC_D33.3_Interoperability_considerations_2017_update.pdf (accessed on 30 September 2019).
- Cirimele, V.; Torchio, R.; Virgillito, A.; Freschi, F.; Alotto, P. Challenges in the Electromagnetic Modeling of Road Embedded Wireless Power Transfer. Energies 2019, 12, 2677. [Google Scholar] [CrossRef]
- Oslo to Become First City to Charge Electric Taxis over the Air. Available online: https://www.reuters.com/article/us-norway-electric-taxis/oslo-to-become-first-city-to-charge-electric-taxis-over-the-air-idUSKCN1R21ED (accessed on 8 November 2019).
- Foote, A.; Onar, O.C.; Debnath, S.; Chinthavali, M.; Ozpineci, B.; Smith, D.E. Optimal Sizing of a Dynamic Wireless Power Transfer System for Highway Applications. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018. [Google Scholar]
- Mohamed, A.A.S.; Meintz, A.; Zhu, L. System Design and Optimization of In-route Wireless Charging Infrastructure for Shared Automated Electric Vehicles. IEEE Access 2019, 7, 79968–79979. [Google Scholar] [CrossRef]
- Mohamed, A.A.S.; Lashway, C.R.; Mohammed, O. Modeling and Feasibility Analysis of Quasi dynamic WPT System for EV Applications. IEEE Trans. Transp. Electrif. 2017, 3, 343–353. [Google Scholar] [CrossRef]
- Lam, A.Y.S.; Leung, K.; Li, V.O.K. Vehicular Energy Network. IEEE Trans. Transp. Electrif. 2017, 3, 392–404. [Google Scholar] [CrossRef]
- Pei, J.; Zhou, B.; Lyu, L. e-Road: The largest energy supply of the future. Appl. Energy 2019, 241, 174–183. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Project | Veh. Type | Driving Cond | Air Gap cm | Max Power kW | Op. Freq. Hz | Eff. % | Ref. and Outcomes |
|---|---|---|---|---|---|---|---|---|
| 1980s | PATH UC Berkeley | Bus | Dynamic | 5–10 | 200 | 20 | 60 | Ref. [29] Project Stopped |
| 1997 | Conductix-Wampfler | Bus | Static Stationary | 4 | 30 | 15 | Patents [30,31] First commercialized static WPT | |
| 2011 | SELECT Utah State University | Bus | Static Stationary | 15–25 | 25 | 20 | 90 | Ref. [32] Commercial activities (WAVE) |
| 2011 | PRIMOVE Bombardier | Bus | Static Stationary Dynamic | 200 | 20 | >85 | Ref. [33] Commercialization static systems in Mannheim, Berlin | |
| 2011 | KAIST Olev | Bus | Static Stationary Dynamic | 15–20 | 100 | 20 | 85 | Ref. [34] First commercialized dynamic wireless charging bus |
| 2016 | ONRL | Pass. car | Slow dynamic | 20 | 22–23 | 90 | Ref. [35] Research Laboratory conditions | |
| 2017 | FABRIC Versailles-Satory Site | 2 serial Pass. cars | Stationary to highway speed (100 km/h) | 17.5 | 20 | 85 | Ref. [36] Experimental representative road |
| Data Measured | Measuring Equipment Description | Measuring Range | Relative Resolution |
|---|---|---|---|
| Vehicle Battery Voltage (UBAT) | Voltage transducer | 0–350 V | 0.6% |
| Vehicle Battery Current (IBAT) | Current transducer | 0–200 A | <0.5% |
| Grid Power (UDC Line and IDC Line) | Multiphase precision Power meter | <0.05% | |
| Distance to the ground (4 points) | Laser transducer | 0–500 mm | <0.5% |
| Car Prototypes | Driving Conditions | Charging Power (kW) | Speed (km/h) | ICNIRP 2010 Compliant |
|---|---|---|---|---|
| EV1 & EV2 | Car inter-distance: 50 m | 18 | 20 | Yes |
| EV1 & EV2 | Car inter-distance: 50 m | 18 | 20 | Yes |
| EV1 & EV2 | Car inter-distance: 50 m | 18 | 50 | Yes |
| EV1 & EV2 | Car inter-distance: 50 m | 18 | 70 | Yes |
| EV2 | Stationary 5 s | 20 | 5–10–5–0 | Yes |
| EV2 | Stationary 5 s | 20 | 5–10–5–0 | Yes |
| EV2 | Zig-Zag | 20 | 20 | Yes |
| EV2 | Misalignment Target 15 cm right | 20 | 40 | Yes |
| EV2 | Misalignment Target 15 cm left | 20 | 40 | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laporte, S.; Coquery, G.; Deniau, V.; De Bernardinis, A.; Hautière, N. Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations. World Electr. Veh. J. 2019, 10, 84. https://doi.org/10.3390/wevj10040084
Laporte S, Coquery G, Deniau V, De Bernardinis A, Hautière N. Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations. World Electric Vehicle Journal. 2019; 10(4):84. https://doi.org/10.3390/wevj10040084
Chicago/Turabian StyleLaporte, Stéphane, Gérard Coquery, Virginie Deniau, Alexandre De Bernardinis, and Nicolas Hautière. 2019. "Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations" World Electric Vehicle Journal 10, no. 4: 84. https://doi.org/10.3390/wevj10040084
APA StyleLaporte, S., Coquery, G., Deniau, V., De Bernardinis, A., & Hautière, N. (2019). Dynamic Wireless Power Transfer Charging Infrastructure for Future EVs: From Experimental Track to Real Circulated Roads Demonstrations. World Electric Vehicle Journal, 10(4), 84. https://doi.org/10.3390/wevj10040084