
A Design Technique of Traction Motor for Efficiency Improvement Based on Multiobjective Optimization

Abstract
:1. Introduction
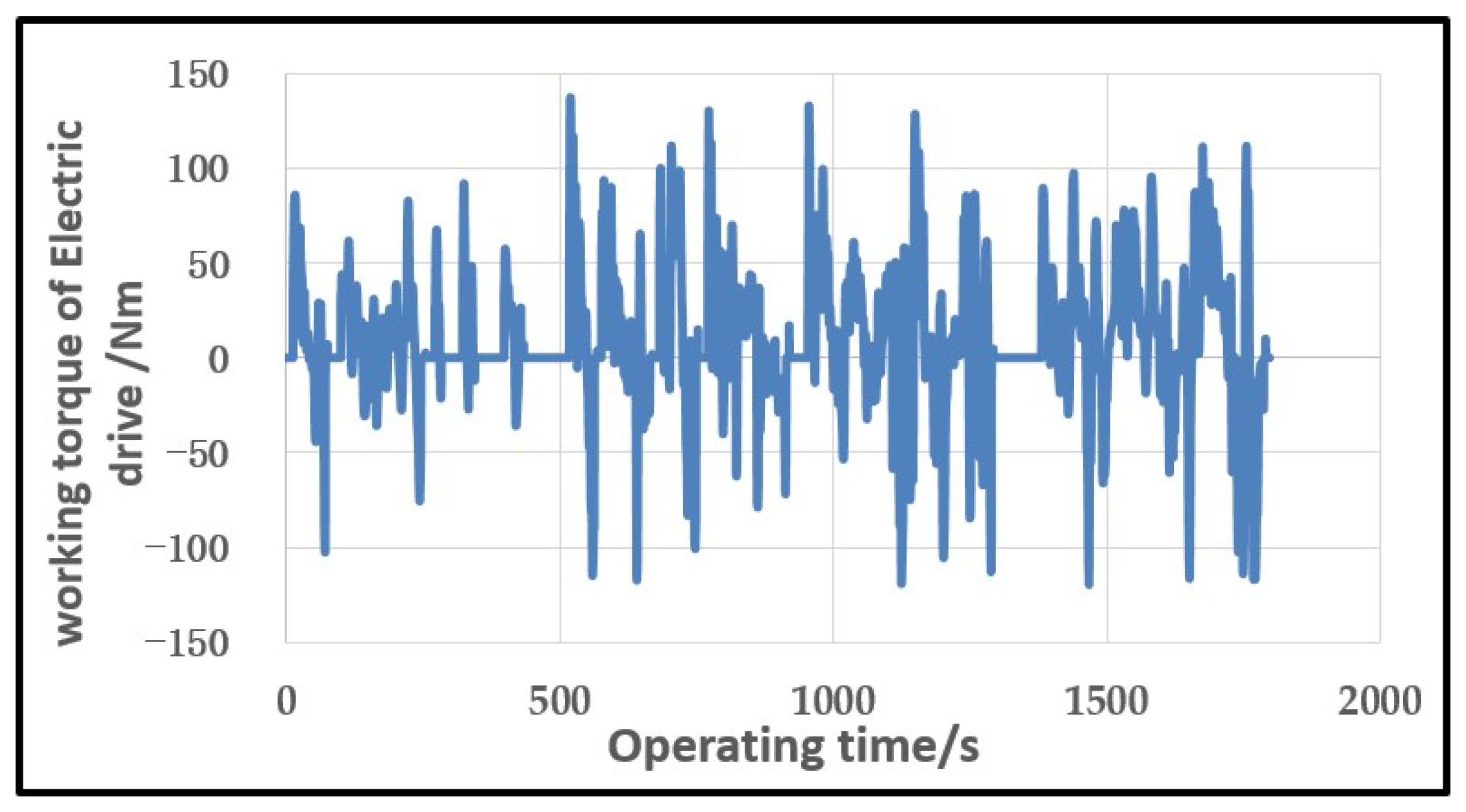
2. Driving Cycle of Traction Motors
2.1. Equivalent Extraction Driving Points over CLTC
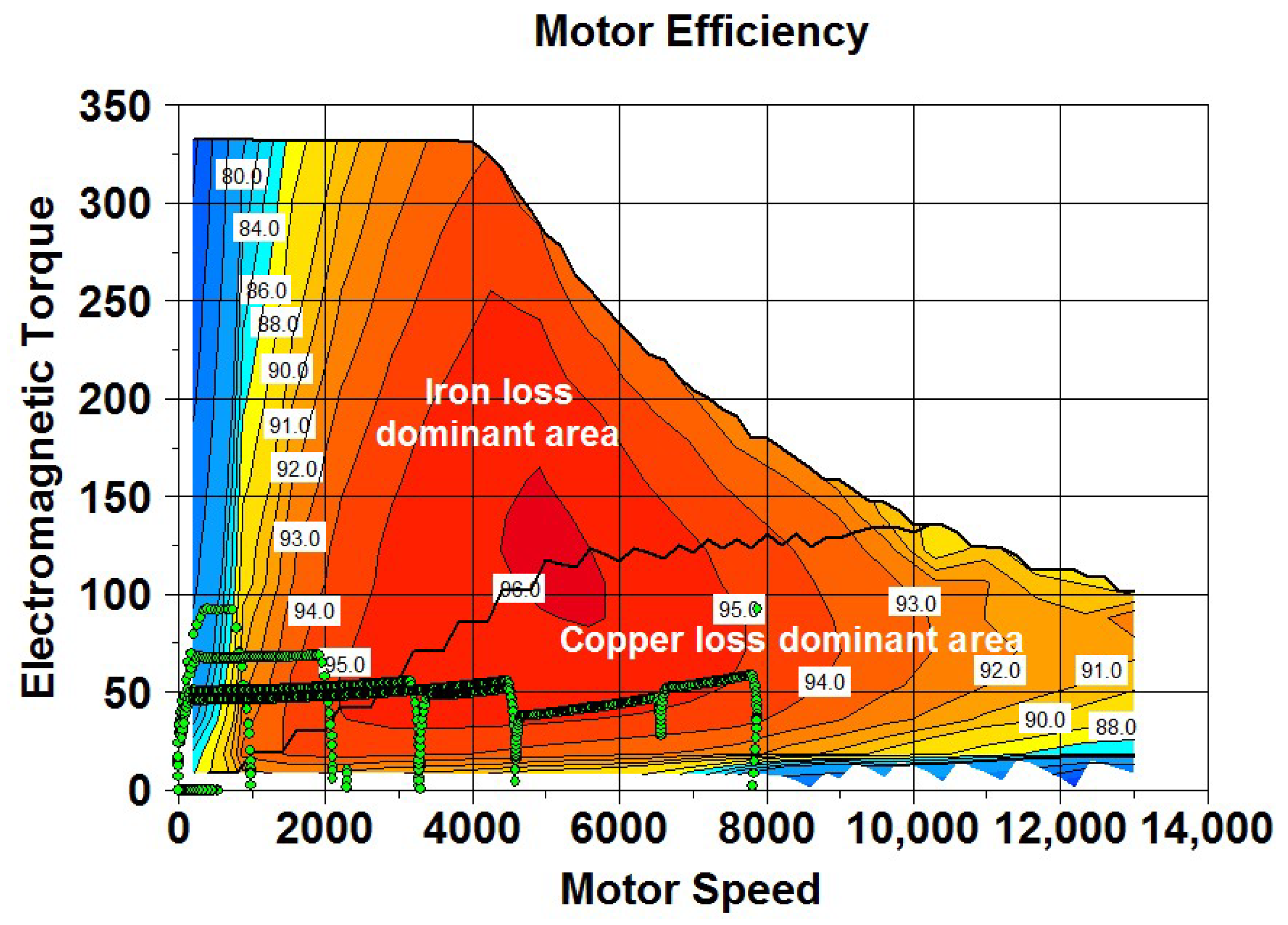
2.2. Motor Loss and Efficiency over Driving Cycle
3. Multiobjective Optimization of Traction Motor
3.1. Select of Multiobjective Optimization Algorithm
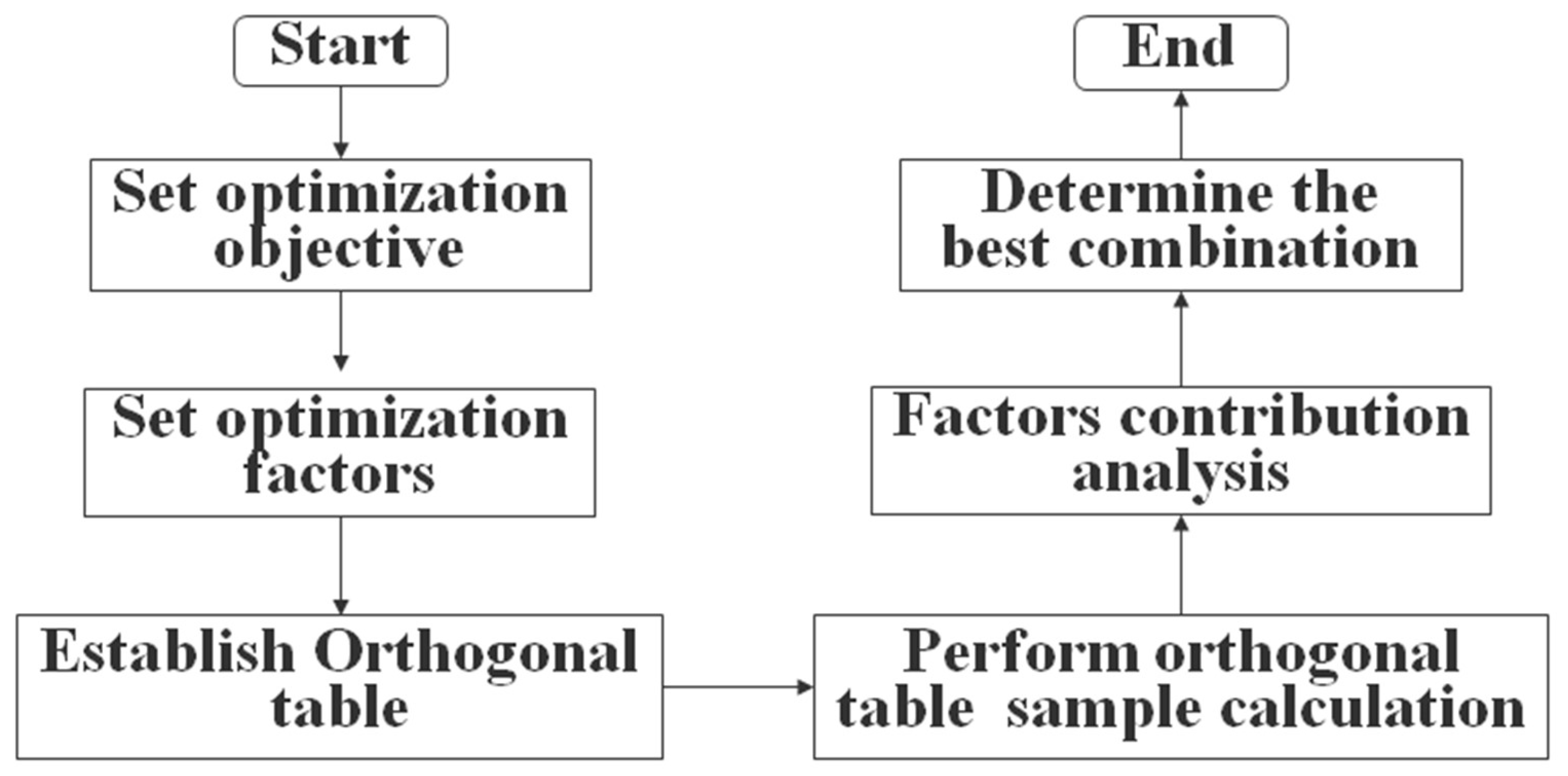
3.2. Construction of Optimization Process
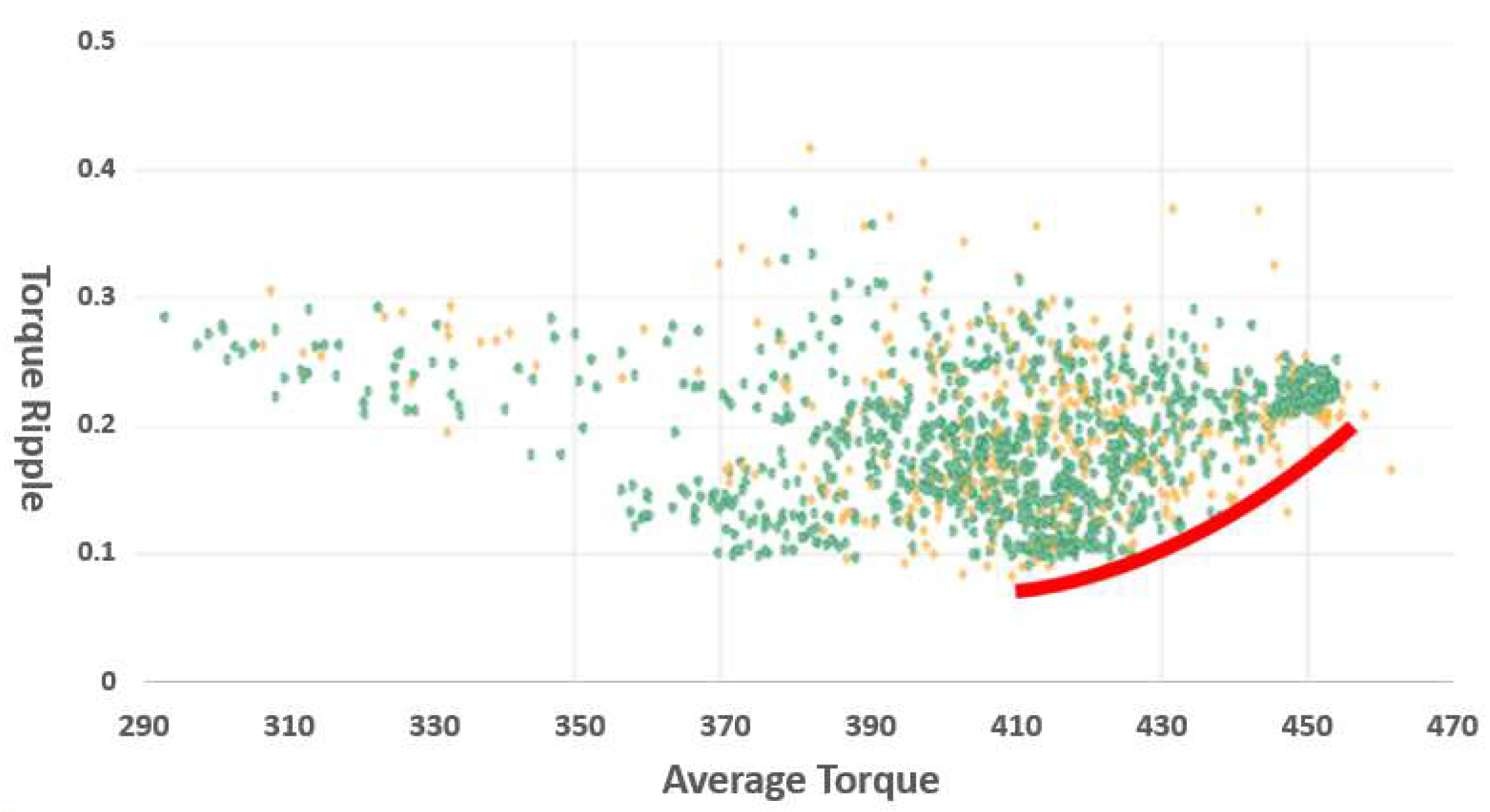
- Maximize the motor torque. Torque represents motor power and vehicle acceleration. Under the same current condition, the torque per unit volume of the motor represents the torque density of the motor and the cost advantage of the motor.
- Minimize the torque ripple. Motor torque ripple affects motor power output stability, which is caused by the harmonic of the motor magnetic field. Small harmonic content is beneficial to the performance of motor [7].
- Maximize the operating efficiency of motor. The efficiency of motor working condition can be obtained by processing the efficiency of three typical working points of equivalent conversion. The higher efficiency of the motor, the lower energy consumption, and the higher driving range.
- Better motor NVH performance. NVH noise comes from the radial electromagnetic force of the motor. The excitation source of the motor can be reduced by reducing the order harmonics of the main electromagnetic force which is beneficial to suppress the noise of the motor.
- The number of optimization factors should be suitable. With the increase of optimization factors, these factors are arranged and combined with each other, and all possible processes grow exponentially. The amount of optimization calculation is huge, the optimization results are difficult to converge. However, if the selection of optimization factors is not comprehensive, the process will be optimized in a local area.
- The optimization factors are independent. Ensure that they do not affect each other.
- The optimization results are closely related to the selected optimization factors, and there is an optimal combination of optimization factors to achieve the optimization objective.
- The value of the optimization factor should be suitable. The geometric dimension will interference and the majority of models is wrong in the process if the range is too large. Meanwhile, if the range is too small, the optimal result is local.
3.3. Rules of Multiobjective Optimization Methods
- The optimization objective must be transformed into a mathematical model, and the relationship between the optimization objective and the optimization factor can be concluded by calculation function.
- The results of iteration should be accurate, and the assumptions and the calculation boundary should be consistent.
- The sampling data is not allowed to be extrapolated, and the sampling points should be evenly distributed.
- Sampling points should be random.
4. Multiobjective Optimization Design
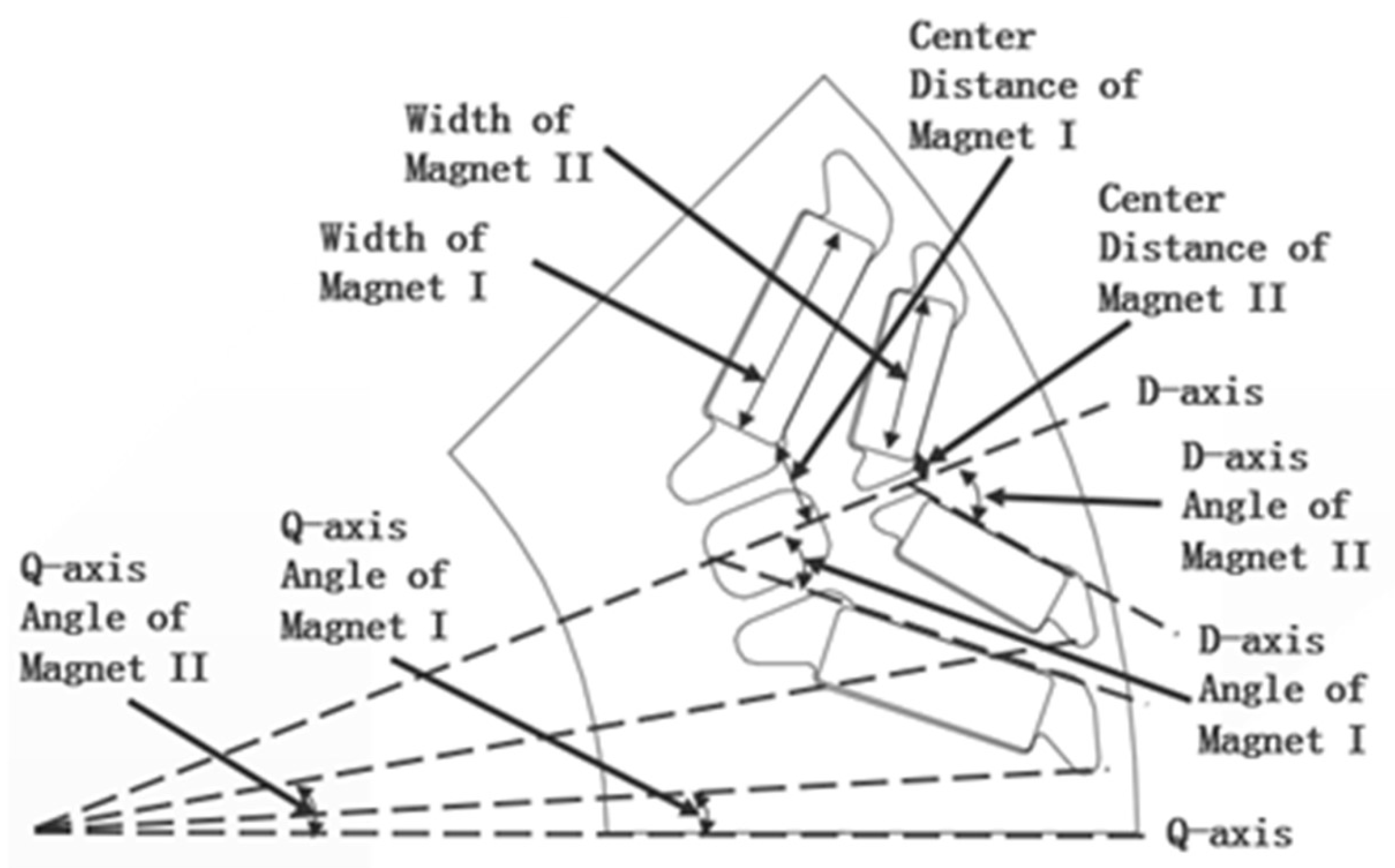
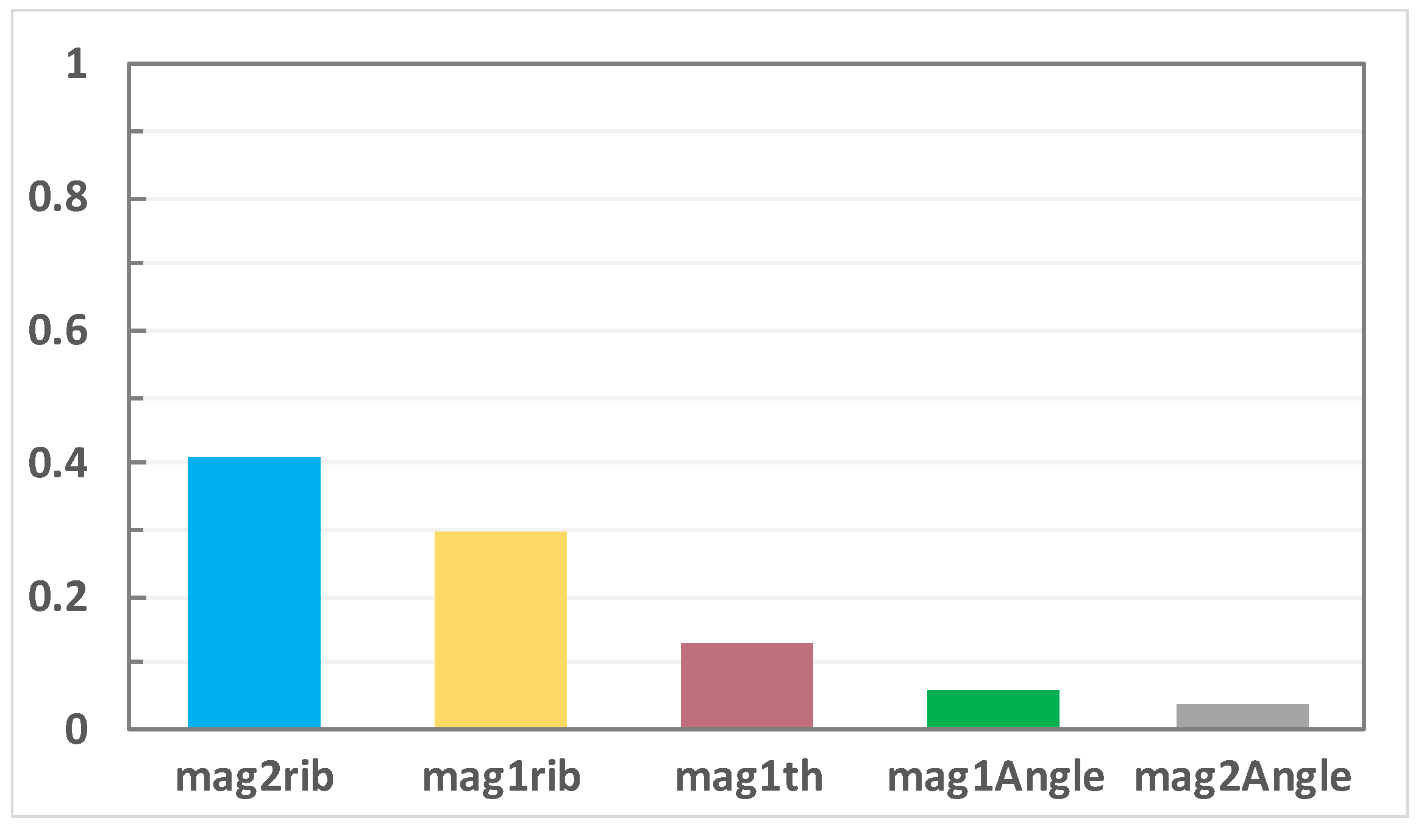
4.1. Optimization Factor
- Ensure that no interference between two layers magnet;
- Ensure that design parameters are independent;
- The value of design parameters in a reasonable range to ensure the optimization space;
- Avoid the parametric combination against the principle of electromagnetic field theory.
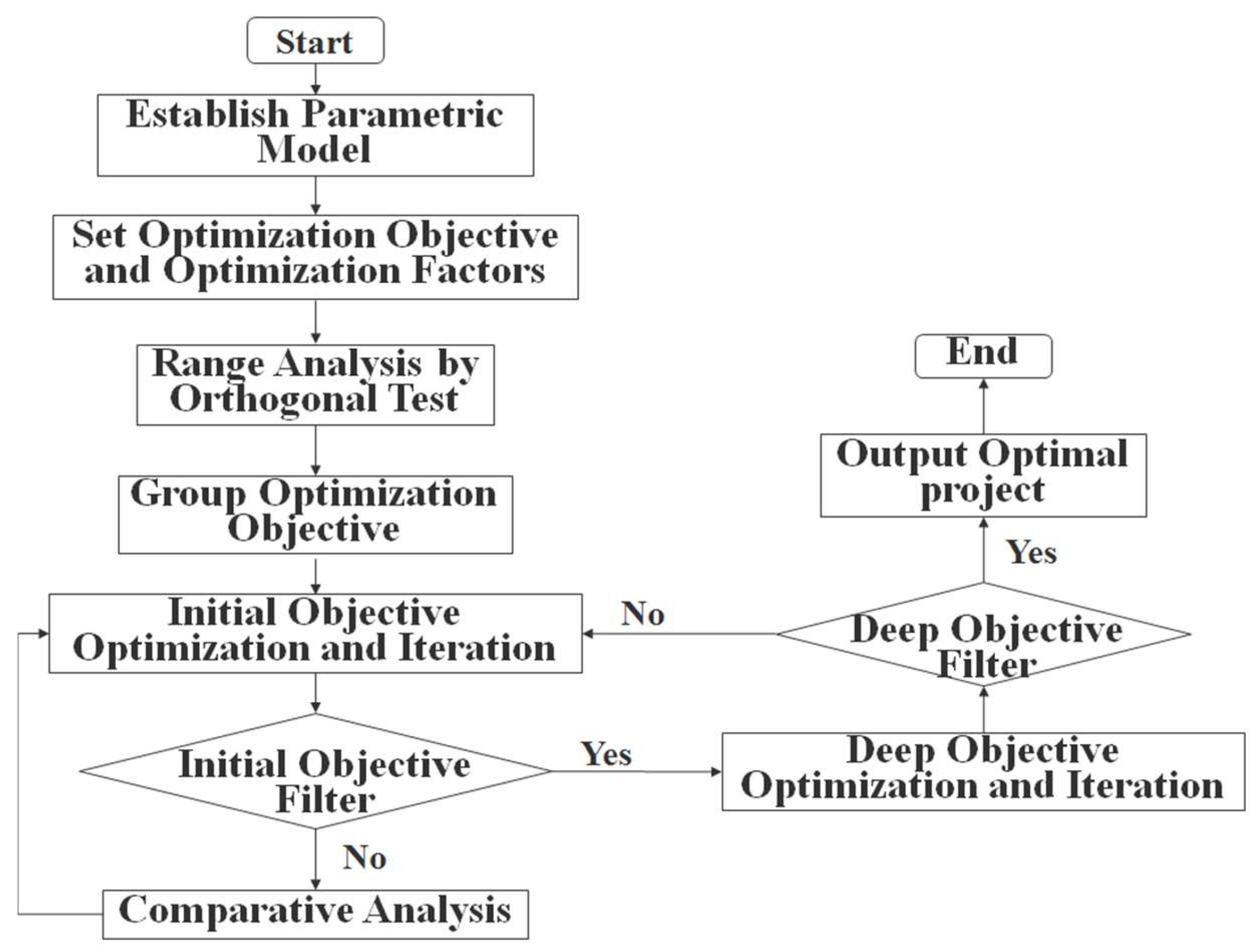
4.2. Optimization Flow
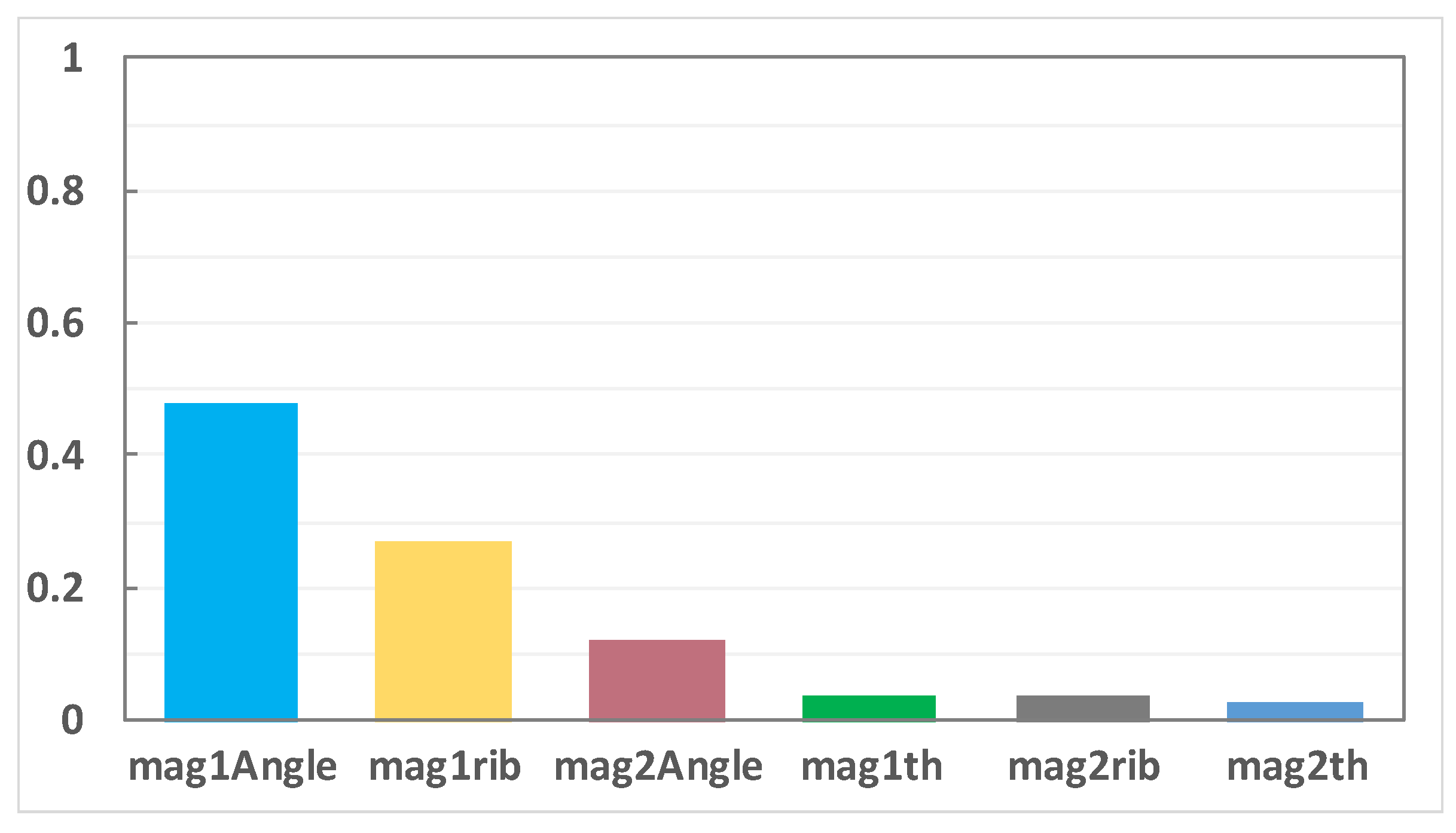
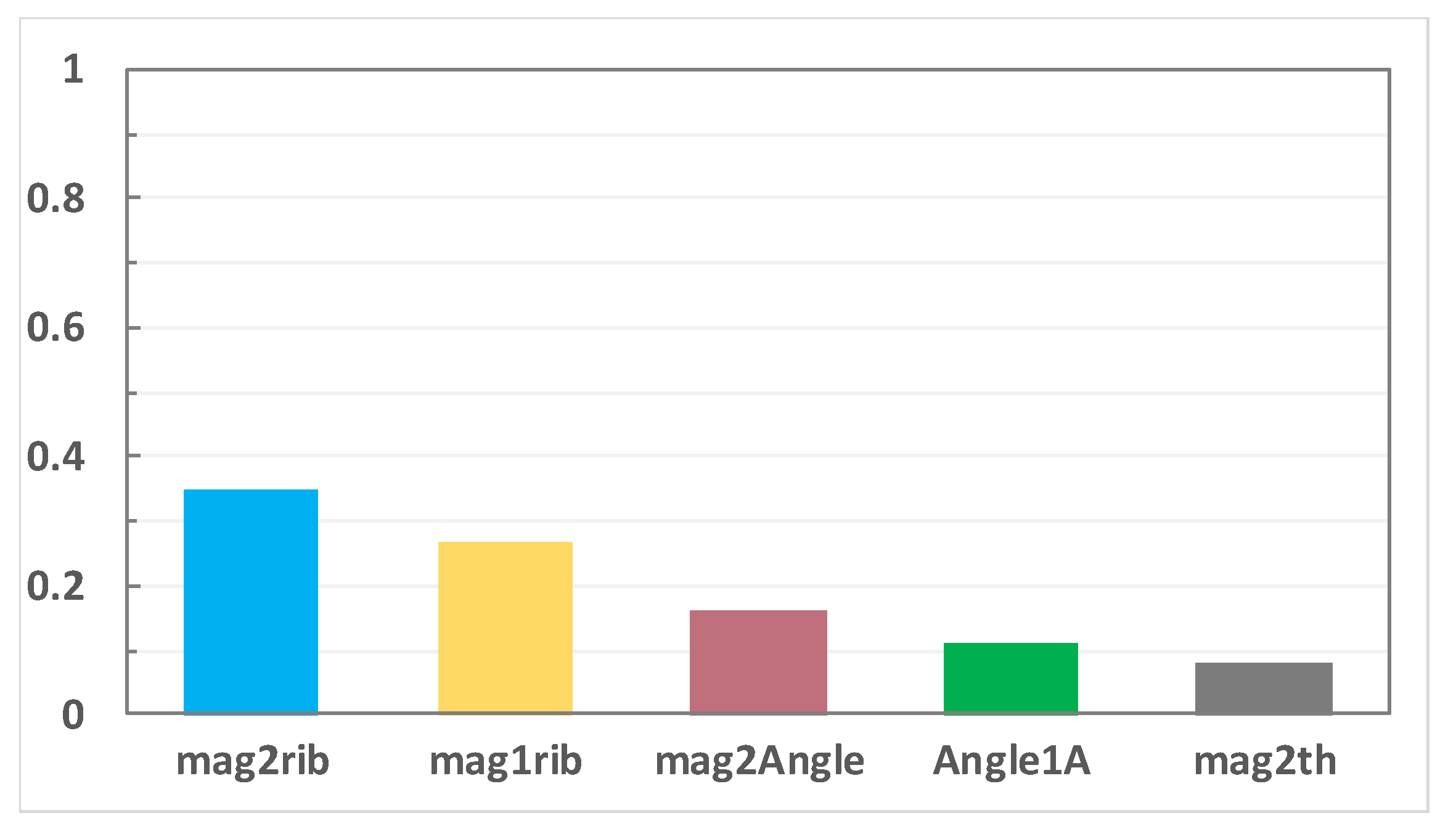
4.3. Evaluation of Optimization Result
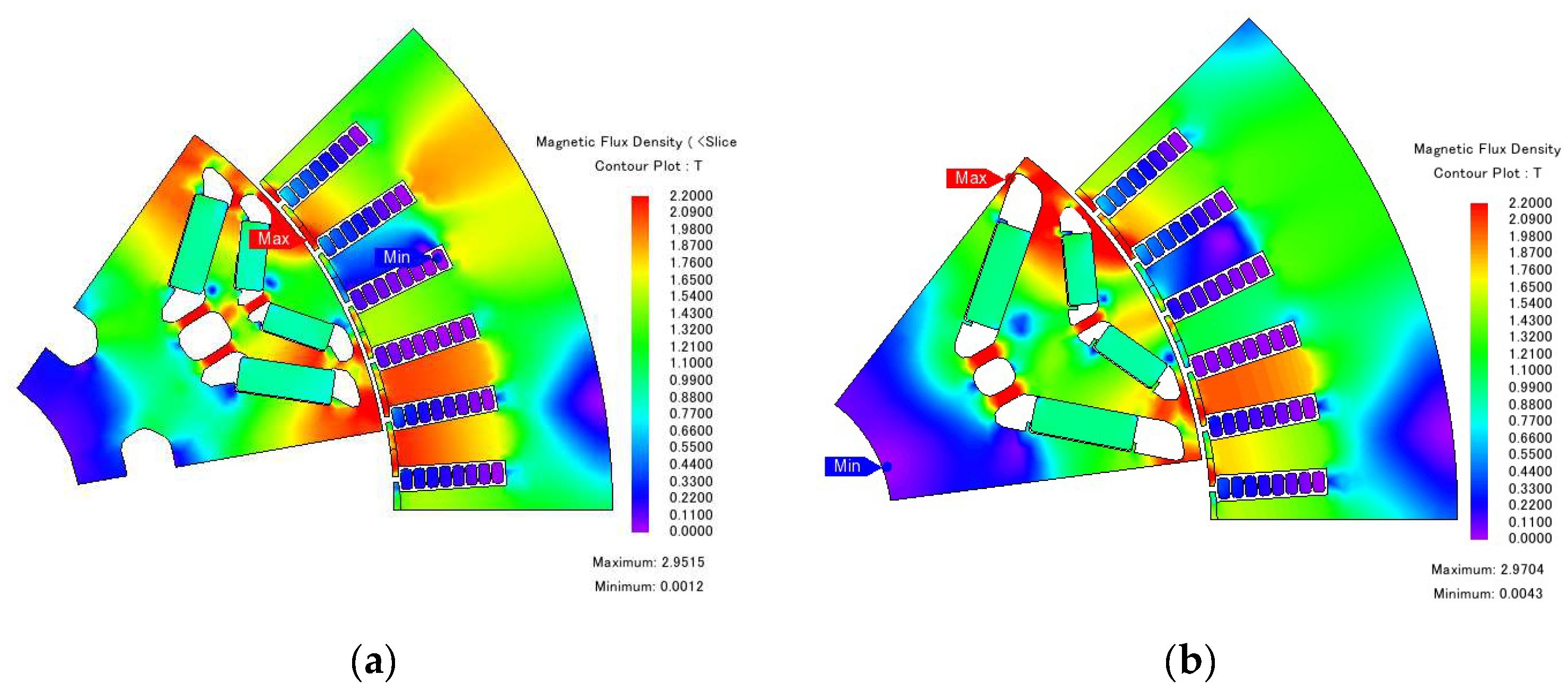
4.4. Comparison of Design
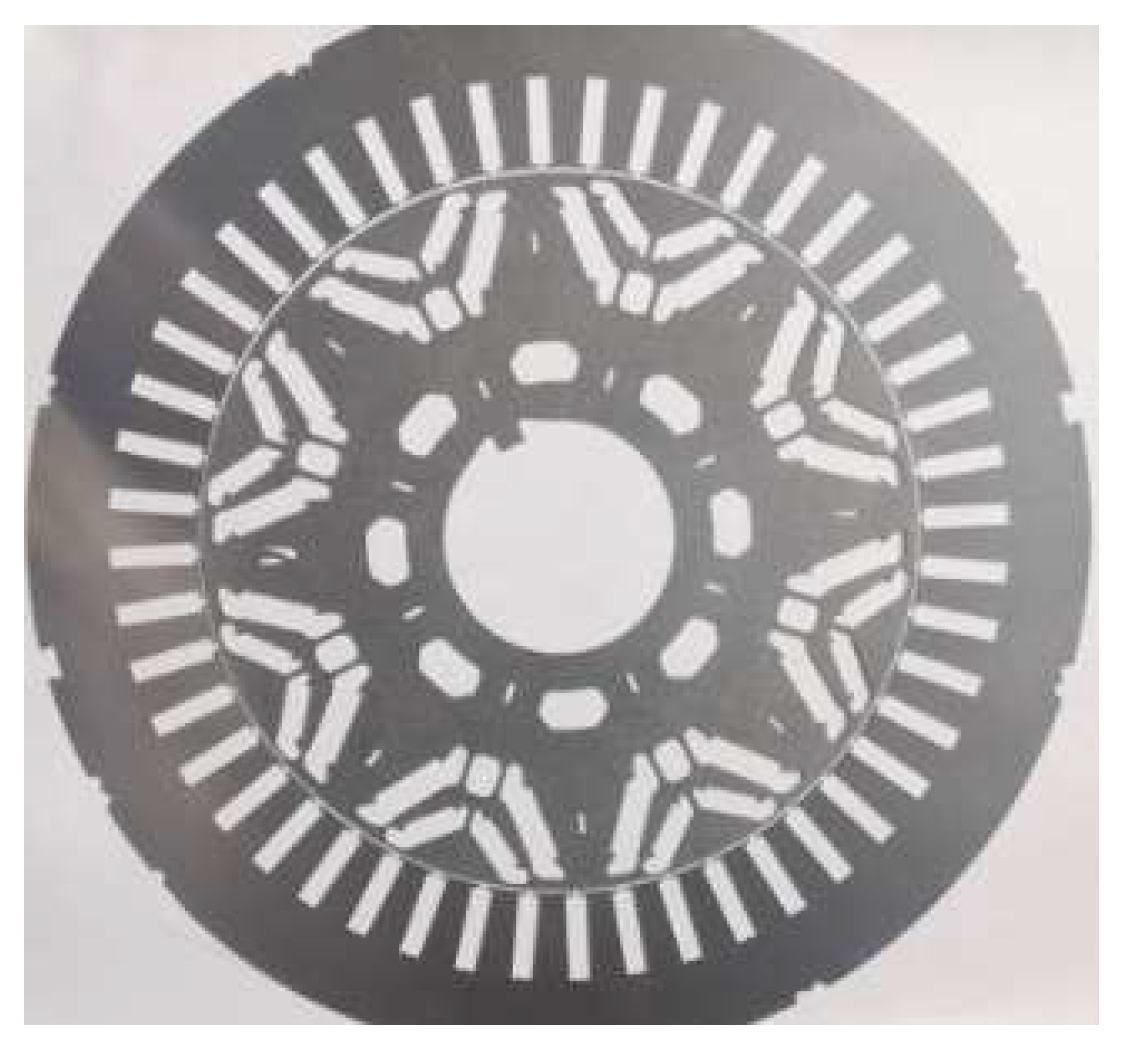
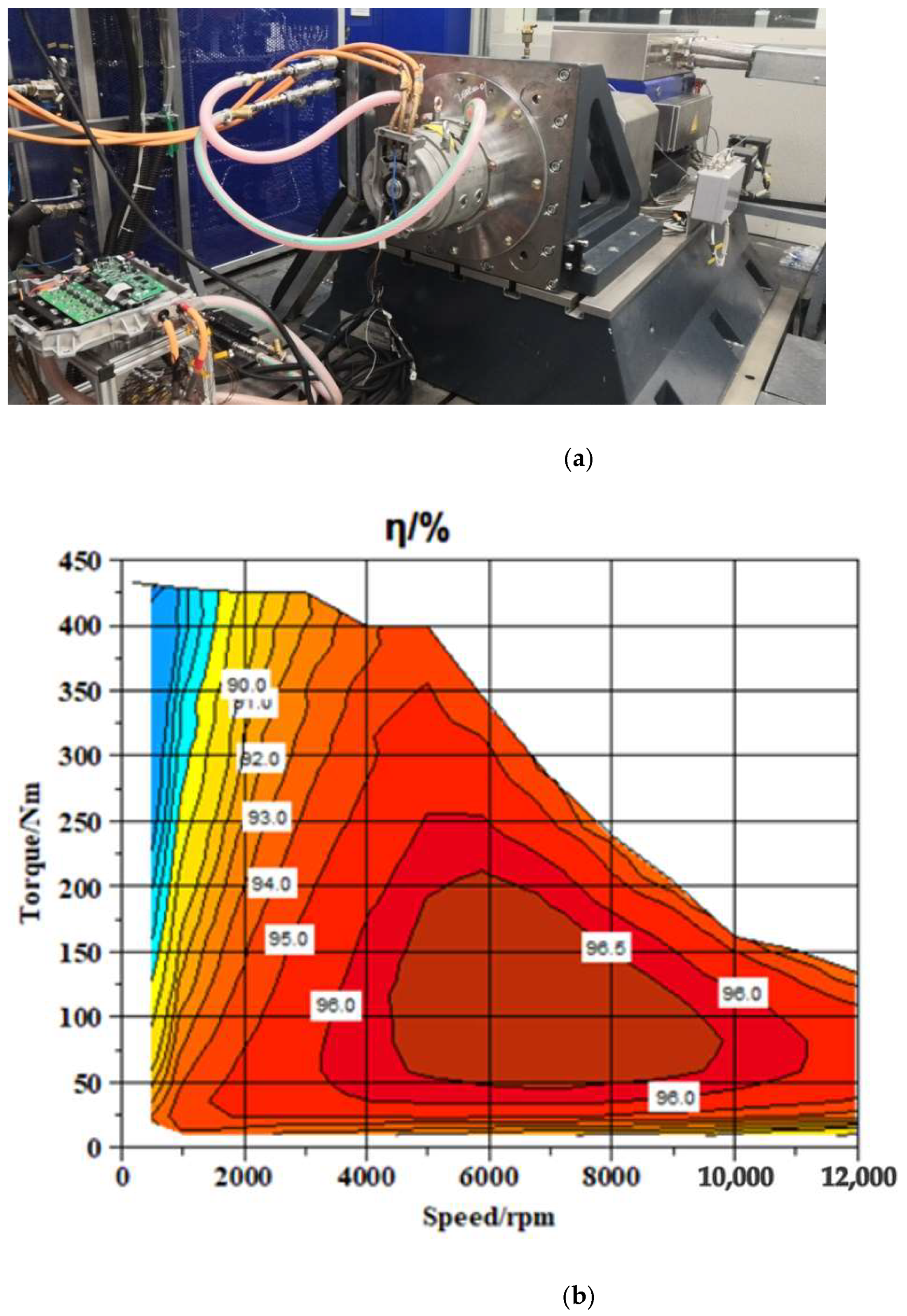
5. Experimental Result
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Tang, R. Theory and Design of Modern Permanent Magnet Motor; China Machine Press: Beijing, China, 1997. [Google Scholar]
- Tang, Y. Electrical Machinery; Machinery Industry Press: Beijing, China, 2014. [Google Scholar]
- Chen, S. Design of the Electric Machine; Machinery Industry Press: Beijing, China, 2004. [Google Scholar]
- Wen, Y. Application of Multi-Objective Hybrid Genetic Algorithm in the Optimization Design of Permanent Magnet Motor. Master’s Thesis, North China Electric Power University, China, Beijing, 2017. [Google Scholar]
- Huang, R.; Zheng, D. Optimal design of unequal thickness permanent magnet motor based on Kriging model and particle ‘swarm optimization algorithm. Small Spec. Electr. Mach. 2020, 48, 19–23. [Google Scholar]
- Lu, Y.; Miao, H.; Zeng, C. Multi objective optimization design of surface built in permanent magnet synchronous motor based on Taguchi method. Micromotors 2019, 52, 1–5. [Google Scholar]
- Zhang, Y.; Du, R.; Zhao, X.; Ye, Q. Motor noise optimization based on multi-objective genetic algorithm. Small Spec. Electr. Mach. 2020, 48, 21–25. [Google Scholar]
- Du, X.; Huang, K.; Tan, G.; Huang, X. Multi-objective optimization of permanent magnet motor torque based on response surface method. Small Spec. Electr. Mach. 2019, 47, 20–23. [Google Scholar]
- Hao, J. Design and Multi Objective Optimization of High Power Density Permanent Magnet Synchronous Motor. Master’s Thesis, China University of Geosciences, Beijing, China, 2020. [Google Scholar]
- Ma, H. Design and Multi Objective Optimization of Low Torque Ripple Synchronous Reluctance Motor. Master’s Thesis, Hefei University of Technology, Hefei, China, 2019. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Major Parameter | Value |
|---|---|
| Vehicle Weight (kg) | 1600 |
| Tire Rolling Radius (m) | 0.307 |
| Peak Power (kW) | 200 |
| Peak Torque (Nm) | 430 |
| Gear Ratio | 11.8 |
| Speed (rpm) | Torque (Nm) | Power Weight (%) | Time Weight (%) |
|---|---|---|---|
| 621 | 39 | 0.03 | 0.14 |
| 1491 | 34 | 0.10 | 0.22 |
| 2481 | 38 | 0.14 | 0.17 |
| 3513 | 32 | 0.17 | 0.16 |
| 4439 | 35 | 0.21 | 0.15 |
| 5414 | 34 | 0.10 | 0.06 |
| 6435 | 36 | 0.09 | 0.04 |
| 7486 | 40 | 0.06 | 0.02 |
| 8994 | 34 | 0.10 | 0.04 |
| Speed (rpm) | Torque (Nm) | Power Weight (%) | Time Weight (%) |
|---|---|---|---|
| 1784 | 36 | 0.34 | 0.60 |
| 4260 | 33 | 0.33 | 0.26 |
| 7000 | 36 | 0.33 | 0.14 |
| Major Parameter | Value |
|---|---|
| Motor type | IPM |
| Voltage (V) | 396 |
| Peak power (kW) | 200 |
| Duration of peak power (s) | 60 |
| Peak torque (Nm) | 410 |
| Peak current (Arms) | 600 |
| Continuous power (kW) | 90 |
| Duration of continuous power (min) | 30 |
| Max. output speed (rpm) | 16,500 |
| Max. outer diameter of motor (mm) | 220 |
| Cooling condition | Water-cooling |
| Design Variables | Symbol | Value Range | Value Interval |
|---|---|---|---|
| D-axis Angle of Magnet I (°) | mag1Angle | [60–120] | 0.4 |
| Q-axis Angle of Magnet I (°) | mag1rib | [3–13] | 0.2 |
| Width of Magnet I (mm) | mag1wid | [14–18] | 0.2 |
| D-axis Angle of Magnet II (°) | mag2Angle | [80–140] | 0.4 |
| Q-axis Angle of Magnet II (°) | mag2rib | [18–29] | 0.2 |
| Width of Magnet II (mm) | mag2wid | [8–11] | 0.2 |
| Rotor outer diameter (mm) | D2 | [70–75] | 0.5 |
| Air gap (mm) | gap | [0.6–0.8] | 0.05 |
| Parameter | Initial Model | Optimized Model |
|---|---|---|
| Winding form | Flat wire | Flat wire |
| Pole/slot | 8/48 | 8/48 |
| Gap structure | Uniform air gap | Uniform air gap |
| Stator outer diameter/inner diameter (mm) | 220/149.4 | 220/143.6 |
| Length of stator core (mm) | 150 | 140 |
| Length of stator assembly (mm) | 200 | 190 |
| Air gap (mm) | 0.7 | 0.8 |
| Width of Magnet I (mm) | 14.5 | 15 |
| D-axis Angle of Magnet I (°) | 82 | 82 |
| Q-axis Angle of Magnet I (°) | 8.3 | 2.3 |
| Center distance of Magnet I (mm) | 10 | 10 |
| Width of Magnet II (mm) | 10 | 10 |
| D-axis Angle of Magnet II (°) | 103 | 131 |
| Q-axis Angle of Magnet II (°) | 22.4 | 18.4 |
| Center distance of Magnet II (mm) | 4 | 4 |
| Rotor outer diameter (mm) | 74 | 71 |
| Cost Factor | 1 | 0.92 |
| Motor Data | CLTC Efficiency |
|---|---|
| Initial model | 95.0% |
| Optimized model | 95.6% |
| Typical Working Point | Optimized Model | Initial Model | ||
|---|---|---|---|---|
| Copper Loss(W) | Iron Loss(W) | Copper Loss(W) | Iron Loss(W) | |
| 36 Nm@1784 rpm | 191 | 98 | 191 | 139 |
| 33 Nm@4260 rpm | 209 | 326 | 209 | 486 |
| 36 Nm@7000 rpm | 251 | 712 | 252 | 1093 |
| Motor Data | CLTC Efficiency |
|---|---|
| Simulation | 95.6% |
| Measurement | 94.8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Zhao, H.; Wang, Y.; Yin, X.; Qi, H.; Li, P.; Lin, Z. A Design Technique of Traction Motor for Efficiency Improvement Based on Multiobjective Optimization. World Electr. Veh. J. 2021, 12, 260. https://doi.org/10.3390/wevj12040260
Guo S, Zhao H, Wang Y, Yin X, Qi H, Li P, Lin Z. A Design Technique of Traction Motor for Efficiency Improvement Based on Multiobjective Optimization. World Electric Vehicle Journal. 2021; 12(4):260. https://doi.org/10.3390/wevj12040260
Chicago/Turabian StyleGuo, Shoulun, Huichao Zhao, Yu Wang, Xiangrui Yin, Hongyang Qi, Pei Li, and Zhanxi Lin. 2021. "A Design Technique of Traction Motor for Efficiency Improvement Based on Multiobjective Optimization" World Electric Vehicle Journal 12, no. 4: 260. https://doi.org/10.3390/wevj12040260
APA StyleGuo, S., Zhao, H., Wang, Y., Yin, X., Qi, H., Li, P., & Lin, Z. (2021). A Design Technique of Traction Motor for Efficiency Improvement Based on Multiobjective Optimization. World Electric Vehicle Journal, 12(4), 260. https://doi.org/10.3390/wevj12040260