




A Path Planning Method for Autonomous Vehicles Based on Risk Assessment

Abstract
:1. Introduction
2. Lane Change Curve Models
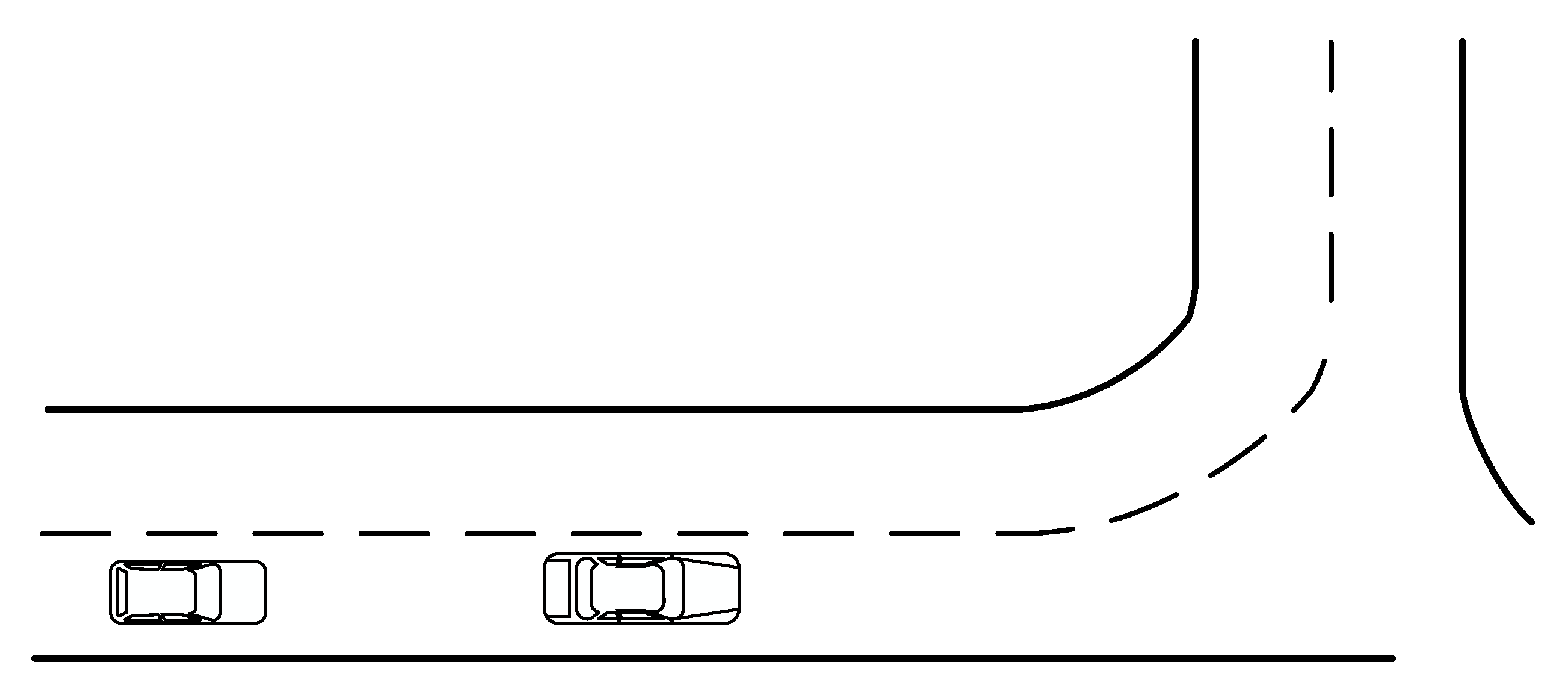
2.1. Analysis of Potential Collision Points of Vehicles
2.2. Mathematical Model of Trajectory
3. Risk Assessment Process
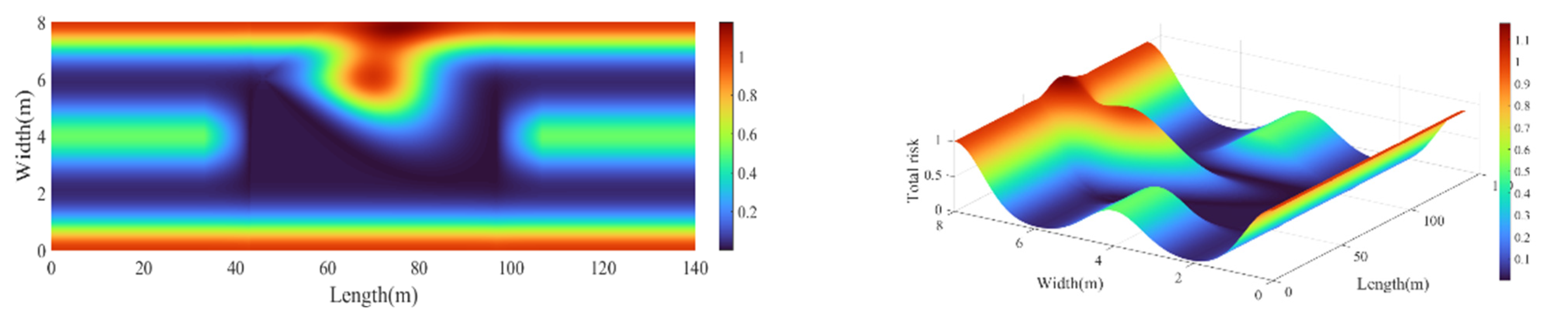
3.1. Establishing Road Risk Assessment Model
3.2. Obstacle Risk Assessment Model
4. Optimal Path Selection
5. Results and Analysis
5.1. The Scene of Static Obstacles
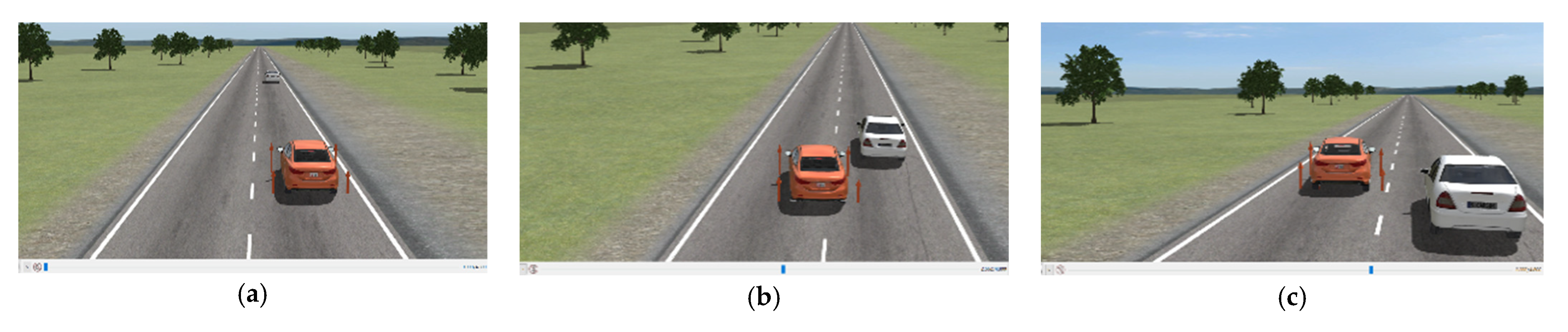
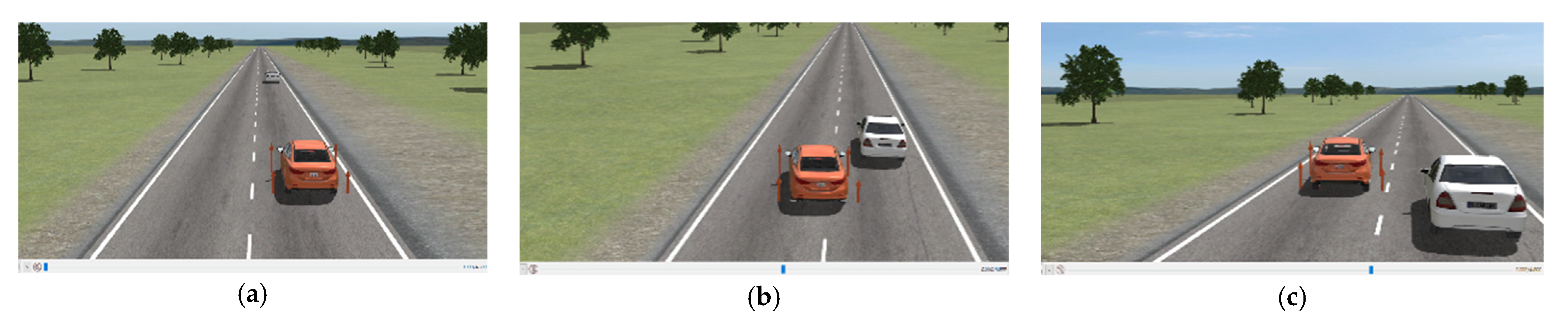
5.2. The Scene of Dynamic Obstacles
5.3. Experimental Results
6. Conclusions
- (1)
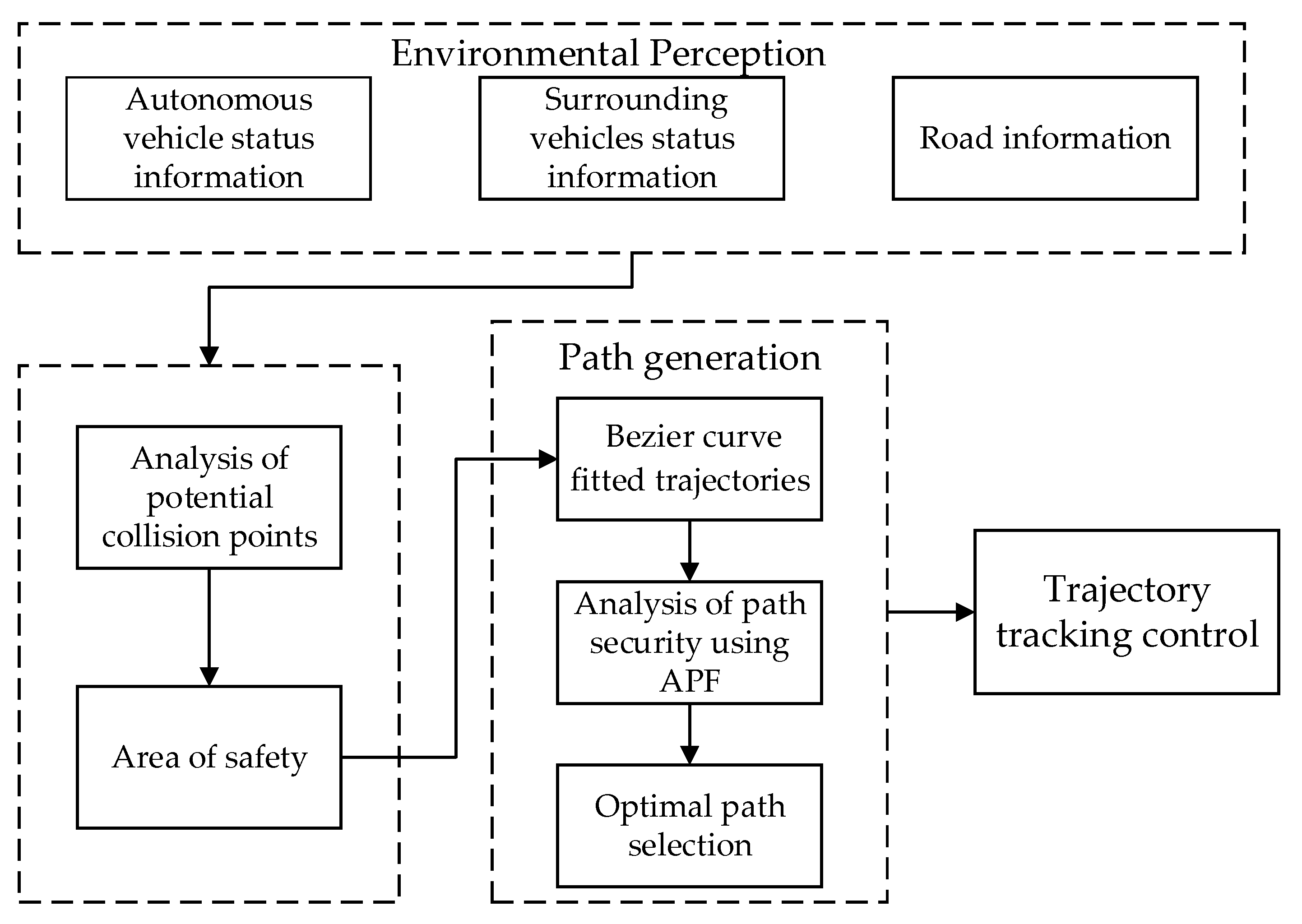
- In this paper, the vehicle is simplified as an ellipse considering the length, width, and speed information, which makes the model more accurate in collision solution. Then, the control points of the fifth order Bézier curve are constrained to generate a series of trajectories in a safe range.
- (2)
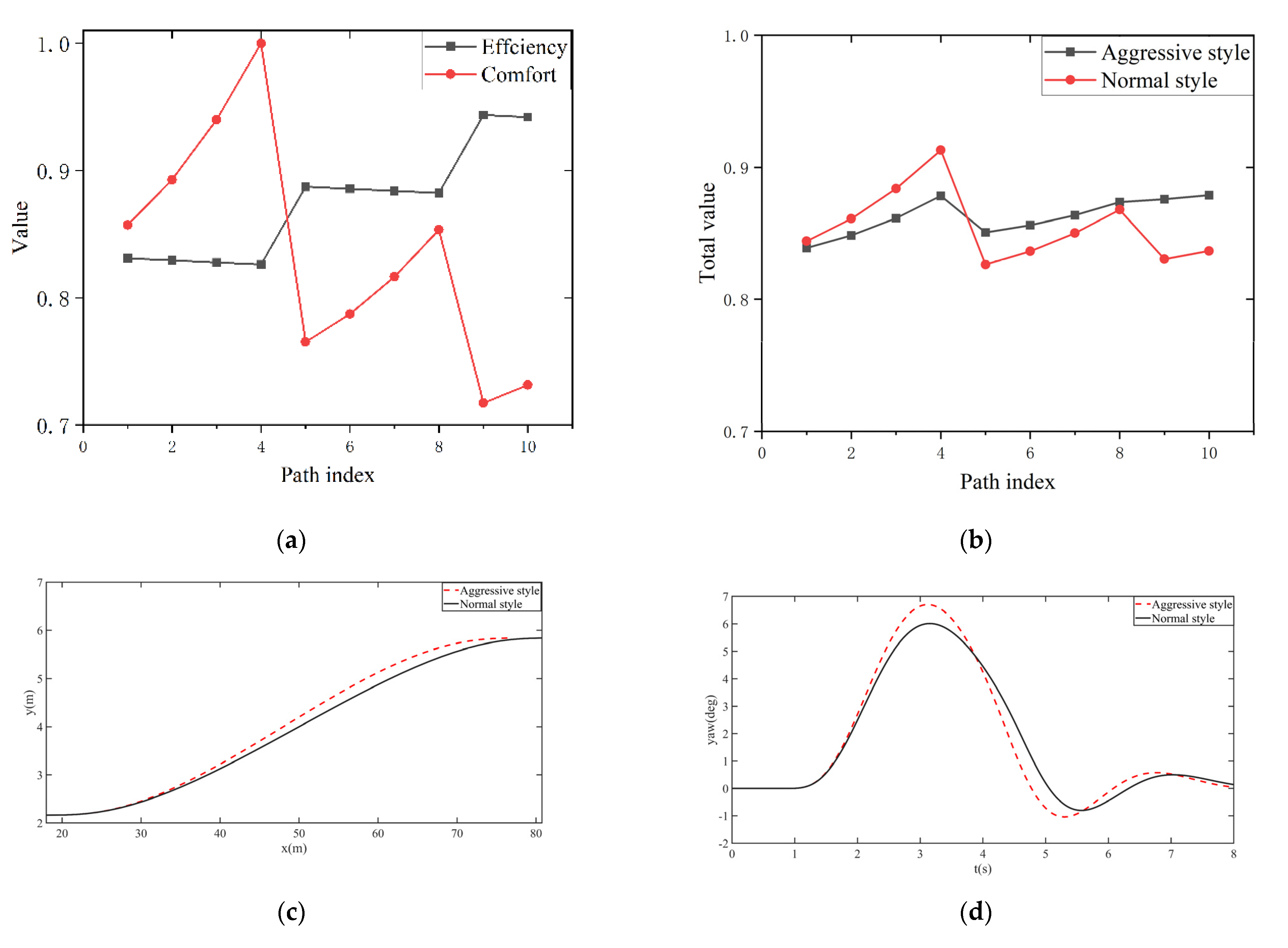
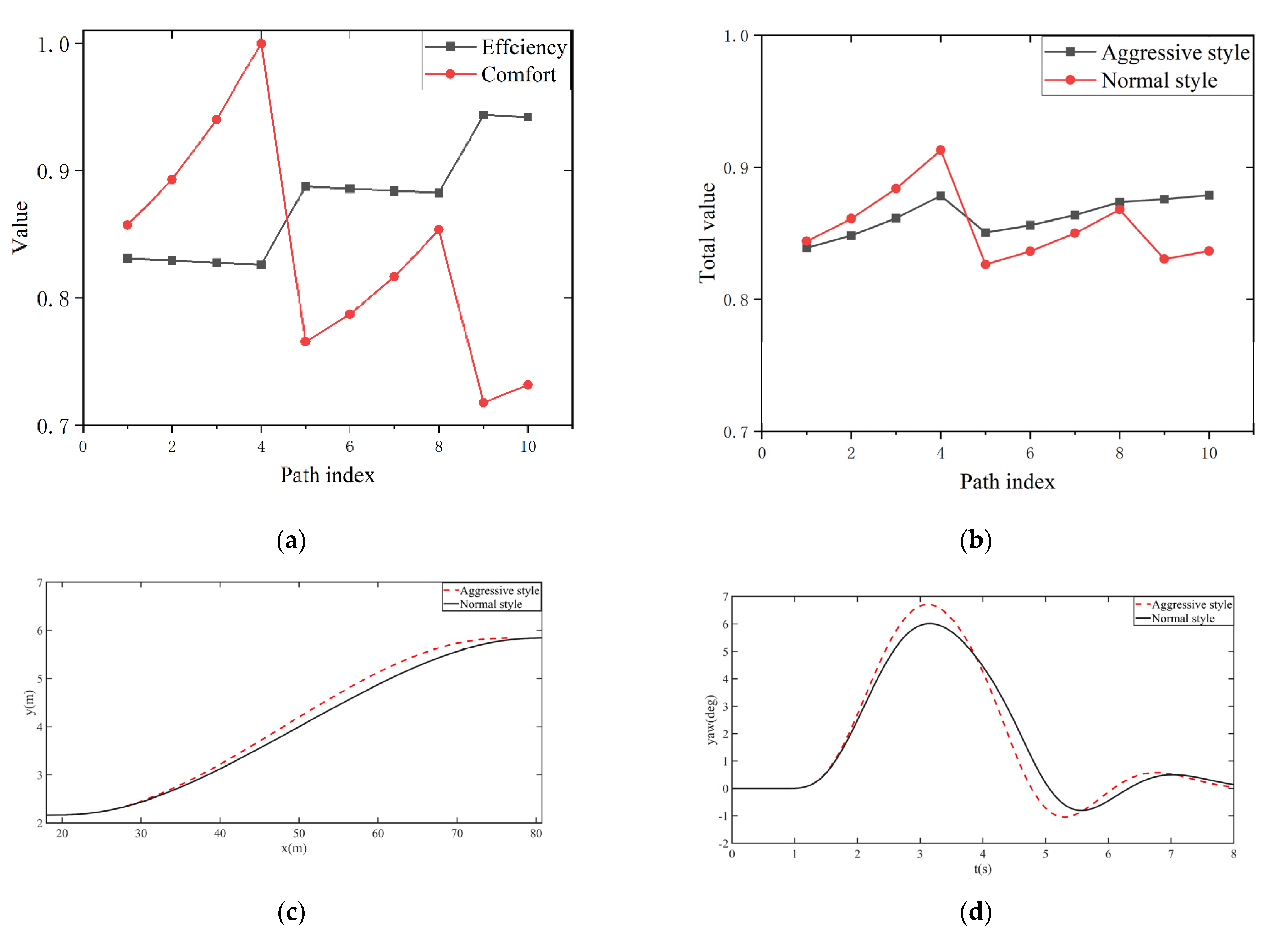
- The APF model, which takes the driver’s reaction time into account, conducts risk assessment on each path and selects the path most suitable for the driver’s habits under the aggressive or the normal style. The results of both simulation and experiment show that the algorithm proposed in this paper has a good effect on driverless vehicles’ lane changing and obstacle avoidance. In the future, continuous lane changing and obstacle avoidance under the condition of multiple obstacles will be considered, and the trajectory prediction of lane changing will be introduced.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, D.; Lam, H.; Peng, H.; Bao, S.; LeBlanc, D.J.; Nobukawa, K.; Pan, C.S. Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques. IEEE Trans. Intell. Transp. Syst. 2016, 18, 595–607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, H.; Zhou, J.; Shao, Q.; Wang, Y. Investigation of a longitudinal and lateral lane-changing motion planning model for intelligent vehicles in dynamical driving environments. IEEE Access 2019, 7, 44783–44802. [Google Scholar] [CrossRef]
- Noh, S. Decision-making framework for autonomous driving at road intersections: Safeguarding against collision, overly conservative behavior, and violation vehicles. IEEE Trans. Ind. Electron. 2018, 66, 3275–3286. [Google Scholar] [CrossRef]
- Qian, L.; Xu, X.; Zeng, Y.; Huang, J. Deep, consistent behavioral decision making with planning features for autonomous vehicles. Electronics 2019, 8, 1492. [Google Scholar] [CrossRef] [Green Version]
- Jeong, Y.; Yi, K. Target vehicle motion prediction-based motion planning framework for autonomous driving in uncontrolled intersections. IEEE Trans. Intell. Transp. Syst. 2019, 22, 168–177. [Google Scholar] [CrossRef]
- Kim, J.; Park, J.H.; Jhang, K.Y. Decoupled longitudinal and lateral vehicle control based autonomous lane change system adaptable to driving surroundings. IEEE Access 2020, 9, 4315–4334. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B.; Ping, X.; An, Q. Path tracking control for autonomous vehicles based on an improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Lu, Y.; Xu, X.; Zhang, X.; Qian, L.; Zhou, X. Hierarchical reinforcement learning for autonomous decision making and motion planning of intelligent vehicles. IEEE Access 2020, 8, 209776–209789. [Google Scholar] [CrossRef]
- Xie, S.; Wu, P.; Peng, Y.; Luo, J.; Qu, D.; Li, Q.; Gu, J. The obstacle avoidance planning of USV based on improved artificial potential field. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; IEEE: Manhattan, NY, USA, 2014; pp. 746–751. [Google Scholar]
- Ma, X.; Zuan, L.; Song, R. Local path planning for unmanned surface vehicle with improved artificial potential field method. In Journal of Physics: Conference Series, Proceedings of the 2020 3rd International Conference on Computer Information Science and Application Technology (CISAT) 2020, Dali, China, 17–19 July 2020; IOP Publishing: Bristol, UK, 2020; Volume 1634, p. 1634. [Google Scholar]
- Szczepanski, R.; Bereit, A.; Tarczewski, T. Efficient local path planning algorithm using artificial potential field supported by augmented reality. Energies 2021, 14, 6642. [Google Scholar] [CrossRef]
- Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle avoidance path planning design for autonomous driving vehicles based on an improved artificial potential field algorithm. Energies 2019, 12, 2342. [Google Scholar] [CrossRef]
- Hongyu, H.U.; Chi, Z.; Yuhuan, S.; Bin, Z.; Fei, G. An improved artificial potential field model considering vehicle velocity for autonomous driving. IFAC Pap. 2018, 51, 863–867. [Google Scholar] [CrossRef]
- Sun, X.; Deng, S.; Zhao, T.; Tong, B. Motion planning approach for car-like robots in unstructured scenario. Trans. Inst. Meas. Control. 2022, 44, 754–765. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.L.; Lin, H.C.; Ma, Z.; Zhao, J. Development of path planning approach based on improved A-star algorithm in AGV system. In Proceedings of the International Conference on Internet of Things as a Service, Taichun, Taiwan, 20–22 September 2017; Springer: Cham, Switzerland, 2017; pp. 276–279. [Google Scholar]
- Zhang, J.; Wu, J.; Shen, X.; Li, Y. Autonomous land vehicle path planning algorithm based on improved heuristic function of A-Star. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211042730. [Google Scholar] [CrossRef]
- Erke, S.; Bin, D.; Yiming, N.; Qi, Z.; Liang, X.; Dawei, Z. An improved A-Star based path planning algorithm for autonomous land vehicles. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420962263. [Google Scholar] [CrossRef]
- Gao, Y.; Hu, T.; Wang, Y.; Zhang, Y. Research on the Path Planning Algorithm of Mobile Robot. In Proceedings of the 2021 13th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Beihai, China, 16–17 January 2021; IEEE: Manhattan, NY, USA, 2021; pp. 447–450. [Google Scholar]
- Zhang, X.; Zhu, T.; Xu, Y.; Liu, H.; Liu, F. Local Path Planning of the Autonomous Vehicle Based on Adaptive Improved RRT Algorithm in Certain Lane Environments. Actuators 2022, 11, 109. [Google Scholar] [CrossRef]
- Duraklı, Z.; Nabiyev, V. A new approach based on Bezier curves to solve path planning problems for mobile robots. J. Comput. Sci. 2022, 58, 101540. [Google Scholar] [CrossRef]
- Ingersoll, B.T.; Ingersoll, J.K.; DeFranco, P.; Ning, A. UAV path-planning using Bezier curves and a receding horizon approach. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Washington, DC, USA, 13–17 June 2016; p. 3675. [Google Scholar]
- Klancar, G.; Blazic, S.; Zdesar, A. C2-continuous Path Planning by Combining Bernstein-Bézier Curves. In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Madrid, Spain, 26–28 July 2017; pp. 254–261. [Google Scholar]
- Chu, K.; Lee, M.; Sunwoo, M. Local path planning for off-road autonomous driving with avoidance of static obstacles. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1599–1616. [Google Scholar] [CrossRef]
- Hu, X.; Chen, L.; Tang, B.; Cao, D.; He, H. Dynamic path planning for autonomous driving on various roads with avoidance of static and moving obstacles. Mech. Syst. Signal Process. 2018, 100, 482–500. [Google Scholar] [CrossRef]
- Zheng, L.; Zeng, P.; Yang, W.; Li, Y.; Zhan, Z. Bézier curve-based trajectory planning for autonomous vehicles with collision avoidance. IET Intell. Transp. Syst. 2020, 14, 1882–1891. [Google Scholar] [CrossRef]
- Zhang, Z.; Zheng, L.; Li, Y.; Zeng, P.; Liang, Y. Structured road-oriented motion planning and tracking framework for active collision avoidance of autonomous vehicles. Sci. China Technol. Sci. 2021, 64, 2427–2440. [Google Scholar] [CrossRef]
- Chen, C.; He, Y.; Bu, C.; Han, J.; Zhang, X. Quartic Bézier curve based trajectory generation for autonomous vehicles with curvature and velocity constraints. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Manhattan, NY, USA, 2014; pp. 6108–6113. [Google Scholar]
- Tharwat, A.; Elhoseny, M.; Hassanien, A.E.; Gabel, T.; Kumar, A. Intelligent Bézier curve-based path planning model using Chaotic Particle Swarm Optimization algorithm. Clust. Comput. 2019, 22, 4745–4766. [Google Scholar] [CrossRef]
- Zhou, J.; Zheng, H.; Wang, J.; Wang, Y.; Zhang, B.; Shao, Q. Multiobjective optimization of lane-changing strategy for intelligent vehicles in complex driving environments. IEEE Trans. Veh. Technol. 2019, 69, 1291–1308. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Sprung mass | 1370 kg |
| Speed | 60 km/h |
| Wheelbase | 2866 mm |
| Single lane width | 4000 mm |
| Obstacle vehicle length | 4600 mm |
| Potential energy threshold | 0.01 |
| Driver reaction time | 0.35 s |
| Preview time | 0.6 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Li, C.; Zhou, Y. A Path Planning Method for Autonomous Vehicles Based on Risk Assessment. World Electr. Veh. J. 2022, 13, 234. https://doi.org/10.3390/wevj13120234
Yang W, Li C, Zhou Y. A Path Planning Method for Autonomous Vehicles Based on Risk Assessment. World Electric Vehicle Journal. 2022; 13(12):234. https://doi.org/10.3390/wevj13120234
Chicago/Turabian StyleYang, Wei, Cong Li, and Yipeng Zhou. 2022. "A Path Planning Method for Autonomous Vehicles Based on Risk Assessment" World Electric Vehicle Journal 13, no. 12: 234. https://doi.org/10.3390/wevj13120234
APA StyleYang, W., Li, C., & Zhou, Y. (2022). A Path Planning Method for Autonomous Vehicles Based on Risk Assessment. World Electric Vehicle Journal, 13(12), 234. https://doi.org/10.3390/wevj13120234