1. Introduction
In recent decades, metropolises around the world have suffered from serious traffic congestion and environmental pollution, mainly due to the imbalance between traffic network capacity and growing travel demand, as well as the increasing number of private cars [
1]. Vigorously developing electric buses, subways and other public transport with a large capacity to reduce the number of vehicles in limited traffic networks is commonly viewed as an effective means for alleviating traffic congestion and accelerating transportation electrification [
2]. According to the National Bureau of Statistics, the Chinese new energy buses in operation have undergone strong growth since 2010, reaching 589,961 by 2020. Among them, battery electric buses (e-buses) account for more than 60% [
3].
Although traditional transit shares a considerable part of urban travel demand in the city, it can hardly fulfill the personalized and diversified travel demand due to its fixed routes and poor service quality [
4]. Specifically, first, a time–space mismatch exists between bus capacity and travel demand. The surge in demand during peak hours induces congestion and long waiting times for passengers. For example, bus bunching during rush hours further deteriorates the imbalance of passenger capacity between different buses. In contrast, when the travel demand reaches its peak, the emergence of a large number of idle seats causes resource waste. From the perspective of space, the crowing of bus lines is reported to fluctuate in different regions. Generally, the routes close to university towns and commercial centers have to bear more travel demands [
5]. Fixed vehicle capacity cannot adapt itself to the uneven change in time- and space-dependent demand. Second, multiline transfer reduces passenger travel experience. The existing transit network structure can hardly meet the personalized point-to-point demand. Passengers must transfer multiple times to complete their trips. In addition, the single-line bus scheduling mode leads to the failure of effective connections between different lines at transfer stations, thus negatively affecting the satisfaction of passengers with conventional transit. Third, the fixed-route service model ignores the last-mile problem of passenger travel. Due to the poor flexibility and fixed supply mode of traditional transit, there is no effective connection mechanism between the origin/destination of a trip and the nodes of a transport network. Considering passengers’ growing expectations for convenience, the last-mile problem has become an important factor restricting the rapid development of transit systems.
A large number of practices and studies have deeply explored the abovementioned defects of conventional public transport systems. In terms of the mismatch between bus capacity and travel demand, previous studies have focused on one or more aspects of demand prediction for public transport systems [
6], bus single-route/multiroute design [
7,
8,
9], scheduling optimization [
10,
11,
12], and bus dispatching and fleet size determination [
13,
14,
15,
16] to achieve the purpose of reducing the degree of in-vehicle congestion and improving the operational efficiency of the bus fleet. In terms of improving passenger transfer experience, previous studies can be divided into passenger-based and system-based perspectives. The former is generally aimed at minimizing the transfer waiting time or transfer times between different lines [
17,
18]. The latter highlights maximizing the number of buses cooperatively arriving at transfer stations based on a set of criteria for system optimization [
19,
20]. The flexible transit service, a hybrid transit system, makes up for the shortcomings of traditional buses and facilitates last-mile transit. The relevant studies can be categorized into flexible operating mode selection [
21], flexible stop layout, [
22] and other preparatory work in the early planning stage or scheduling optimization during operation [
23]. In particular, Yap et al. (2016) and van Engelen et al. (2018) emphasized the performance of real-time demand response and fleet cooperative control of autonomous flexible transit systems [
24,
25].
A myriad of studies have been devoted to solving various operational problems of the traditional public transport system to improve management economy and service quality. However, restricted by traffic conditions, random demand speed, driving style, and other uncertainties, the mismatch between bus capacity and demand, complex transfer process, and low directness are barely solved. In recent years, with the maturity of wireless communication, onboard sensing, and digital twin technologies, the booming development of autonomous vehicles has brought new opportunities for the innovation of public transport systems [
26]. The introduction of autonomous vehicles in public transport systems will not only reduce labor costs but also offer huge advantages in vehicle safety control and intelligent response. In particular, a new electric modular vehicle (EMV) technology has been proposed and tested by several international companies, such as NEXT Future Transport [
27] and Ohmio [
28], as shown in
Figure 1.
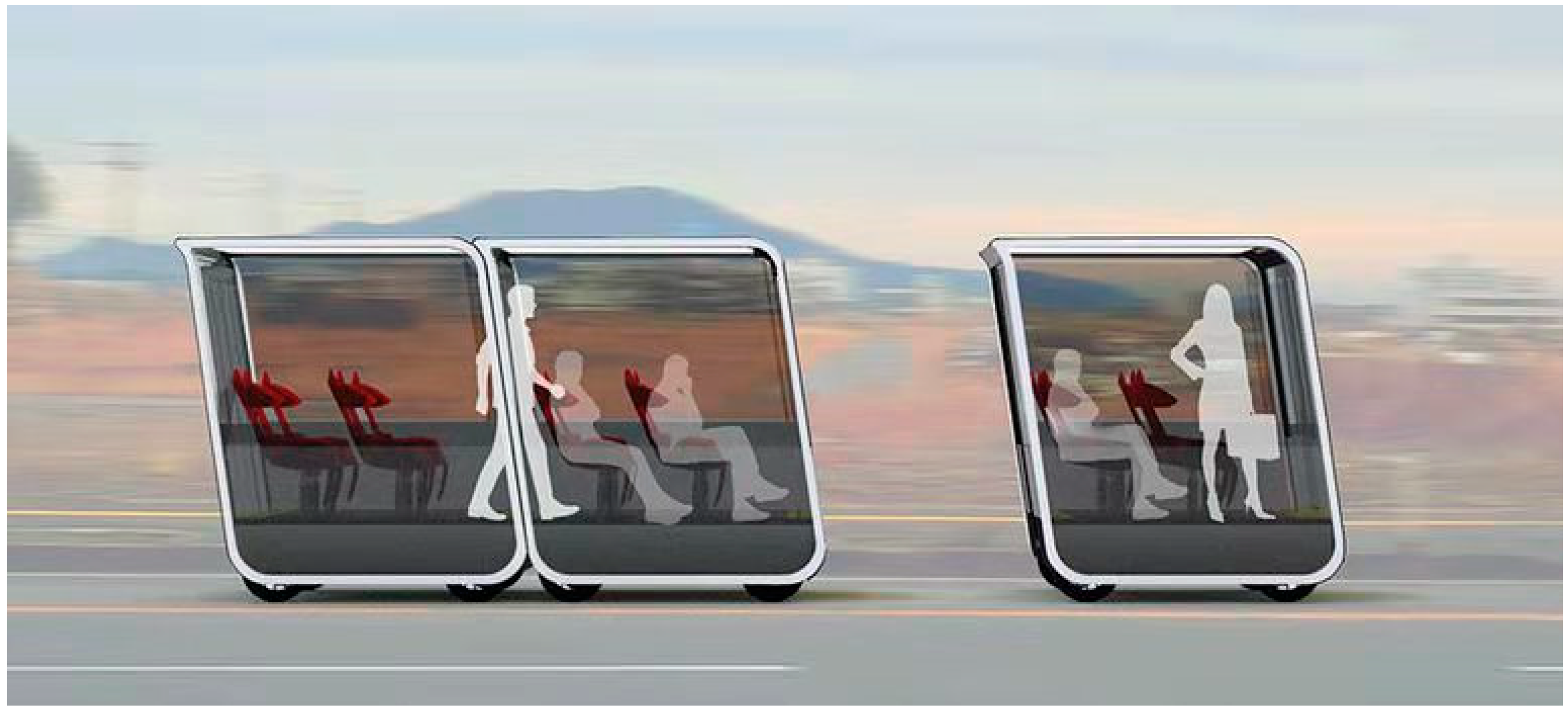
Due to the technical advantages of dynamic bus capacity design and seamless transfer, electric modular vehicles have inestimable potential to improve service quality and guide the electrification of public travel. During the peak time of transit demands, modular vehicles can be combined to increase the capacity supply, while in periods of lower transit demands, multimodular vehicles are disassembled into separate, smaller units, as shown in
Figure 2. Admittedly, this provides a new approach to address the poor fit between vehicle capacity and time-variant demand.
In addition, the modular vehicle can also help passengers transfer en route while on the move, as shown in
Figure 3. Passengers can seamlessly transfer in connecting EMVs, and then the vehicles can be disintegrated to different destinations. This flexible pattern not only improves the ease of transfer but also enhances vehicle utilization since the same number of vehicles can carry passengers in multiple directions.
More attention has been given to the application of modular vehicles in public transport systems. Some studies highlight the dynamic capacity of EMVs and evaluate the performance of modular bus systems in terms of time- and space-dependent demand. Chen et al. (2019, 2020), Dai et al. (2020), and Ji et al. (2021) considered the bus schedule design and capacity adjustment of EMVs in single-line bus operation, which can be explained as the problem of when EMVs will depart and how large the capacity should be dispatched [
29,
30,
31,
32]. Shi et al. (2020, 2021) expanded a single line into a Y-shaped shared-use corridor for modular vehicle movement [
33,
34]. Furthermore, Pei et al. (2021) studied modular transit networks [
35]. Rau et al. (2019) designed a dynamic EMV-based road transit system that serves a larger passenger population than the traditional public bus system [
36].
Another part of the relevant literature focuses on the application of modular vehicles in flexible transit systems. Guo et al. (2018) established a switch between fixed and flexible bus transit under dynamic demand [
37]. Zhang et al. (2020) designed a modular transit system to provide the first- and last-mile service for passengers with time windows [
38]. Liu et al. (2021) customized the travel rules of EMVs in flex-route transit, which allows vehicles to freely visit passengers outside fixed stops, and verified the flexibility and adaptability of EMVs [
39].
The characteristics of the en route transfer of EMVs have also been preliminarily explored. Caros et al. (2021) developed an insertion heuristic algorithm to arrange the journey for EMV fleets and determine whether passengers need en route transfer [
40]. Wu et al. (2021) established a two-stage model to optimize the driving trajectory of modular vehicles at intersections and the transfer strategy of passengers in the coupled units [
41].
In conclusion, the above studies show that EMVs are indeed more adaptable to time-varying demands than traditional buses. The EMV system can reduce the waiting time and transfer time for passengers and improve the service level of the public transport system.
However, these current studies emphasize the operation of EMVs in one scene or multiple scenes at a tactical level but barely consider the macro control of the impact of EMVs in transit system electrification. Therefore, in this paper, we propose an intelligent platoon transit system (IPTS) based on automatic EMVs, which attempts to answer the following questions from a strategic level:
What role do electric modular vehicles play in improving the service level of public transport?
How do the subsystems of the IPTS work together?
What are the challenges faced by multiple operating scenarios of the IPTS?
The contributions of this study are as follows: A novel electric IPTS based on automatic EMVs is proposed for transportation electrification, which is expected to break through the limitations of fixed capacity and multiline transfer of traditional bus operation. The operating modes of three use cases of the IPTS are explored in view of the fluctuant travel demand levels and bus occupancies. The multistage development of the IPTS affected by the automation level of EMVs is discussed.
2. Intelligent Platoon Transit System
Based on the orientation of modular vehicle technology and relevant studies introduced in
Section 1, this section presents the composition and cooperation of the intelligent platoon transit system.
The IPTS, a kind of intelligent transportation system, relies on autonomous EMVs to realize the concept of flexible marshaling of electrified transport fleets, which covers a very wide range of fields, probably including wireless communication, electronic toll collection, vehicle control, and many others. Referring to the studies of Pei et al. (2021), Rau et al. (2019), and Yang et al. (2018) [
35,
36,
42], we first determined the user service system, EMV fleet system, and digital infrastructure system based on the three important components of the transportation system, namely travelers, vehicles, and transportation facilities. Then, considering the range limit of modular vehicles, the power supply system was set up from the perspectives of charging management and grid capacity scheduling to ensure the smooth process of transportation electrification. Finally, the security subsystem and the central control subsystem were designed as the security guarantee and the connection bridge of each system, respectively. As shown in
Figure 4, six subsystems were collaboratively fused, with each system assuming diverse functions and realizing multisource information interaction through the central control system.
2.1. Central Control System
As the brain of the whole system, the central control system realizes the interaction and fusion of multisource information by aggregating, parsing, and transferring data from other subsystems. Decentralized travel demand data from the user service subsystem and road network data from the digital facility subsystem are first summarized by the central control system and then input into the EMV fleet subsystem, which is the premise for the EMV fleet to formulate route strategies, scheduling plans, and driving tracks. Then, the central control system specifically parses the implementation plan of the EMV fleet into the vehicle data and battery discharge data, which are fully utilized by the power supply system and security system for charging management and vehicle safety monitoring, respectively. The vehicle data should also be fed back to the digital infrastructure system and user service system. The former completes the data interaction between the EMVs and the road sensors according to the communication protocol, and the latter matches the vehicle data with passenger demands to provide users with travel plans and transfer tips.
2.2. User Service System
The user service system is an important platform, in the form of an app or web page, for passengers to put forward travel requests, including origin, destination, and expected boarding time. With the central control system as the bridge, the user service system is closely connected to the EMV fleet system. Based on the vehicle operation information provided by the EMV fleet system, the user service system needs to project the individual user to the vehicle and provide one or more travel options for passengers with different preferences and price sensitivities. With similar travel times and distances, the fares of multiple transfer schemes are likely higher than those of the direct schemes.
The intelligent information prompt function also plays a vital role in the user service subsystem, capable of passenger transfer reminders, station displays, and arrival time prediction, which informs passengers when and where to transfer through voice broadcasts, text messages, and other ways before the transfer time. It is worth noting that if passengers miss a transfer, they need to resubmit their travel request to the central control system.
2.3. EMV Fleet System
Schedule design, route planning, EMV marshaling, and trajectory control are the key tasks of the EMV fleet subsystem that aim to reduce travel cost and transfer times as much as possible on the premise of the time window of the passenger and capacity restrictions. The compact and automatic-electrified EMVs, a key element of the EMV fleet subsystem, can be operated independently or combined with multiple units. In addition to the significant advantages of adjustable capacity and seamless transmission, coupled driving will reduce the average dispatching cost and energy cost of a single unit. Obviously, the rear EMV saves more energy than the lead EMV. EMV platoons carry passengers to multiple destinations by integrating their own resources or making requests to surrounding EMVs to exchange passengers. Therefore, the electric modular fleet system greatly enhances the flexibility and convenience of public transport services and further accelerates transportation electrification by attracting travel demands.
2.4. Digital Infrastructure System
The intelligent infrastructure system proceeds with the cooperative management of the traffic network to ensure the efficient transit of autonomous EMVs, among which the roadside units play important roles in sensing and integrating multisource space–time traffic information. When the automatic EMV steps into the range detected by the roadside unit, they can interact with each other according to the communication protocol. Furthermore, the target information is extracted by the automatic EMVs to support trajectory planning. The digital infrastructure system offers the traffic network a comprehensive perception ability and provides EMVs with experience prediction beyond human driving to maintain traffic security.
2.5. Power Supply System
Considering that EMVs are powered by electricity and have range limits (60–100 km), the power supply system, an essential feature of transportation electrification, contributes to eliminating the impact of limited battery capacity on the driving range.
The power supply system provides charging services for modular vehicles, requiring one or more charging infrastructures, including fast charging, slow charging, and battery swaps. It also tends to be the mode of optical-storage–charging-integrated charging stations, which not only realizes the self-use of clean energy but also dispatches the peak-valley power through the energy storage system. More importantly, the power system designs reasonable charging schemes according to available charging resources, battery discharge data, and vehicle trips to ensure the efficient operation of EMVs.
2.6. Security System
The security system, as a powerful shield of the IPTS, mainly involves three functions, namely health warning, vehicle safety monitoring, and data security. First, battery degradation is inevitable during the operation of electric vehicles. Even more worrisome is the occasional drop in power at low temperatures. Therefore, real-time monitoring and the early warning of battery health are necessary for the operation of EMV platoons. Second, the vehicle should be monitored throughout its journey in the case of unrecorded or unexpected scenes. If the vehicle can recognize the surrounding environment and make correct decisions, the monitoring system takes no action; otherwise, an alarm is issued, and the safety specialist takes over. Third, the operational process of the IPTS involves the transmission of massive data in a mobile communication network. Therefore, information security is also necessary to ensure the consistency and operation of the IPTS. In particular, high-precision map data, elevation data, and user data should be collected and encrypted in accordance with regulatory requirements.
The remainder of this paper is organized as follows:
Section 3 discusses the application scenarios of the proposed system. The key issues and case applicability faced by the three developing periods of the IPTS are described in
Section 4. Finally,
Section 5 concludes this paper.
3. Use-Case Design
The IPTS can adapt to different scenarios with a variety of operating modes and vehicle capacities and act as a replacement or supplement to the existing public bus system. Referring to the relevant research on EMVs, we defined three application scenarios of IPTS systems.
Specifically, considering the first- and last-mile modular vehicle systems designed by Zhang et al. (2020) [
38], we proposed a demand response scenario with a small capacity that allows EMVs to provide point-to-point travel services. By combining the study of Dai et al. (2020) on the hybrid operation of human-driven buses and modular vehicles with the study of Liu et al. (2021) on the free access of modular vehicles to passengers outside fixed stations [
31,
39], a flex-route scenario with the linkage operation of EMVs and buses was defined. A regular operating scenario with a large volume was determined with reference to the design of dynamic autonomous road transit by Rau et al. (2019) [
36].
As shown in
Figure 5, the low, medium, and high levels of travel demand and average bus occupancy in the existing operating lines correspond to the demand response scenario, flex-route scenario, and fixed operating scenario, respectively. Taking the low level as an example, that is, when the travel demand and the average bus occupancy rate of the existing buses are all at low levels, the demand response scenario with a small-capacity EMV platoon was adopted.
3.1. Scenario 1: Demand Response Scenario with Small Capacity
This scenario applies to regions with small and sparse demand, which are mostly generated in remote suburbs, newly developed business circles, or narrow residential communities with low road grades. For the sake of the economy, public bus operators usually run fewer buses, and consequently, passengers suffer from long waiting times, which further leads to the loss of users. In more extreme cases, traffic flow in the area may be entirely borne by private cars because the demand is too small to support bus lines. Therefore, poor ridership generally results in the low occupancy of traditional buses in these regions, the two main reasons for which are a small demand base and a large proportion of auto usage.
However, the IPTS with EMVs can be of great advantage in areas where the travel demand is small and sparse. Compared with the space waste of large-capacity buses, EMVs are dispatched with a higher departure frequency on the premise of ensuring a certain occupancy rate to improve the level and operational economy of public transport services. At the same time, the compact size of EMVs is tailor-made for driving through crowded residential areas or commercial areas, which can overcome the limitations of road conditions and truly provide users with a point-to-point service. As shown in
Figure 6, a single unit or unit platoon shuttles passengers between different demand points within a given region. Such demand-responsive scenarios are sure to stand out in first- and last-mile public transport.
3.2. Scenario 2: Flex-Route Scenario with Linkage Operation of EMVs and Buses
If the traffic flow is at a relatively balanced level with the occupation of the existing bus lines, only a handful of demands cannot be met, either from fixed stops or from within a limited area around the fixed line. Then, the IPTS dispatches the EMVs and buses to form a back-and-forth following mode, as shown in
Figure 7. The bus serves as the leader to pick up passengers on the benchmark line, and the platoon composed of a few units is responsible for checking free users within a certain range and the remaining passengers who miss the front bus. The linkage operating mode makes up for the defects of narrow service coverage caused by fixed bus stops, in which the bus shares most of the ridership, while EMVs play a supplementary role and pick up the remaining demand.
In this scenario, special attention should be given to the departure interval between the leading bus and the following EMVs, the size of the operating region, and the detour path of the follower. This model has a tighter departure interval than that of traditional buses so that the following EMVs can effectively complement the buses. The departure interval can be appropriately extended according to the actual travel demand. Additionally, the demarcation of the operating area is worth studying, which should take into account both service coverage and operational efficiency. Additionally, it is best not to include loops in the route of the follower. If passengers miss the shift, they can merely wait for the next.
3.3. Scenario 3: Regular Operation Scenario with Large Volume
This scenario serves the trunk roads with heavy travel demand. According to the actual operating situation, some bus lines operated in the commercial core areas and university towns are busy most of the day, especially during rush hours, resulting in crowded passengers on board. The unserved passengers must constantly wait. Regular bus service operators reduce the departure time interval and deploy more vehicles to decrease the average waiting time. However, an interval that is too small brings new problems, namely insufficient headway and bus bunching.
To overcome the above shortcomings, the multiunit platoon with a large capacity serves the excess passenger demand, as shown in
Figure 8. In view of the trunk lines capable of fixed user groups, the operating mode only needs to follow the original fixed bus lines and dynamically adjust the vehicle capacity and departure interval. Decoupling to support other busy lines is also allowed when the demand is low.
The above three scenarios, as substitutes or supplements to traditional buses, have different priorities in terms of travel demand and operational flexibility. In practice, not only can one scenario be involved in a region, but different scenarios can switch according to the time-varying demands in a day to achieve the best fit between travel demand and vehicle capacity and improve service quality. For a bus operating area with single and stable demand characteristics, it is also very reasonable to adopt only one scenario.
4. Three Development Periods of the IPTS
Restricted by the degree of EMV automation, the development of the IPTS probably goes through three periods: primary stage, transition stage, and ultimate stage, among which the use case in
Section 3 and the key technical problems faced by the IPTS are different, as shown in
Table 1.
In the primary stage, the driver, as the critical controller of the system, is assigned to each EMV since self-driving is only an auxiliary function. Moreover, the vehicle speed control deviation caused by the heterogeneity of drivers and unstable traffic conditions makes it difficult to accurately realize real-time dynamic seamless transfer. On the other hand, the expensive labor cost of multi-EMV operation also affects the economic benefit of system implementation. Given the cost, the system benefits more from the demand response scenario and the flex-route scenario than from the fixed operating scenario. Therefore, at this stage, how to design a use case to improve the avenue and how to seek a balance between the manual and automatic driving modes to reduce the random influence of human factors on the system are the key technical issues.
Furthermore, the transition stage is turned on with the maturity of autonomous vehicle technology, which means that only the leader of the platoon and the EMVs to be disengaged are equipped with drivers, while the others are controlled by the leading vehicle. Compared with the previous stage, the labor cost is lower, and the vehicle automation level is higher. In use cases two and three, due to relatively fixed lines, vehicle coupling or decoupling can be predicted in advance or with low frequency, so it is generally enough to assign one driver to the leading EMV of the platoon. However, faced with the frequent vehicle decoupling in case one, if the EMV to be decoupled is equipped with a driver at the beginning, it will cause a waste of resources. Otherwise, drivers need to be dispatched in real time after EMV separation, which not only causes inconvenience to drivers but also increases the complexity of the scheduling algorithm of the EMV fleet system. Therefore, matching the driver with the EMV to be detached is the challenge in this stage.
The system eventually achieves a fully automated ultimate stage, applicable to the three scenarios mentioned in
Section 3, in which the interference of human factors in the system is reduced. However, since everything in a digital system can be remotely sensed and controlled, the security risk of the system is further expanded. How to effectively build a strong network barrier deserves more attention. Last but not least, in the intelligent travel era, whether elderly individuals with low adaptability to the IPTS can successfully complete travel reservations or transfers is not negligible. A transit system with a simple interface and direct travel options will benefit the elderly in a real sense.
5. Conclusions
In this study, a novel electric IPTS based on automatic EMVs was proposed from a strategic perspective to bridge the gap between traditional transit systems, including the adaptive capacity to enhance the fit of time-varying demands and seamless transfer services provided by coupling technology. In terms of public travelers, road infrastructure, transportation electrification, etc., we described the six subsystems involved in the IPTS and visualized their cooperation mechanism in detail. Then, the platoon capacity and operating mode of three use cases were discussed in view of fluctuant travel demand levels and bus occupancies. Among them, the demand response scenario has development potential in the first- and last-mile transportation services. The flex-route scenario is fulfilled by the back-and-forth following mode, and the fixed operating scenario with large capacity is responsible for the trunk roads with heavy demand. Finally, we discussed the multistage development of an IPTS system affected by the automation level of EMVs. The results show that the primary stage is not suitable for the fixed operating scenario with a large volume due to high labor costs. The transition stage with guide drivers confronts the complex dispatch relationship between the drivers and the EMVs. The ultimate stage of driverless vehicles highlights network security risks and low adaptation among elderly individuals.
At the current stage, the strategic traffic framework proposed in this study is more inclined to prospectively explore possible ways to accelerate the electrification of urban transportation and provides a novel public service pattern and policy reference for urban transportation managers to break through the limitations of fixed capacity and multiline transfer in traditional bus operation. In future work, the subsystems and operational scenarios covered by the IPTS should be further expanded. Quantitative analysis methods, such as modeling or simulation, should be adopted to further demonstrate the application potential of the IPTS and emerging EMV technologies.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 Primary stage
Primary stage Transition stage
Transition stage Ultimate stage
Ultimate stage