



Integration of a Chassis Servo-Dynamometer and Simulation to Increase Energy Consumption Accuracy in Vehicles Emulating Road Routes


Abstract
:1. Introduction
2. Materials and Methods
- Energy used by the motor to carry out the tasks of transportation.
- Energy used to turn the wheels of the vehicle when the vehicle is going down a slope pushed by gravity.
- Energy used to turn the wheels of the vehicle when the driver’s command is to cut the motor’s energy. At this point, the mass of the vehicle and the rotating masses have stored kinetic energy and release it; however, in this method, only linear masses are considered.
2.1. Vehicle Mathematical Model
2.1.1. Speed Control
2.1.2. Braking
2.2. Dynamometer Mathematical Model
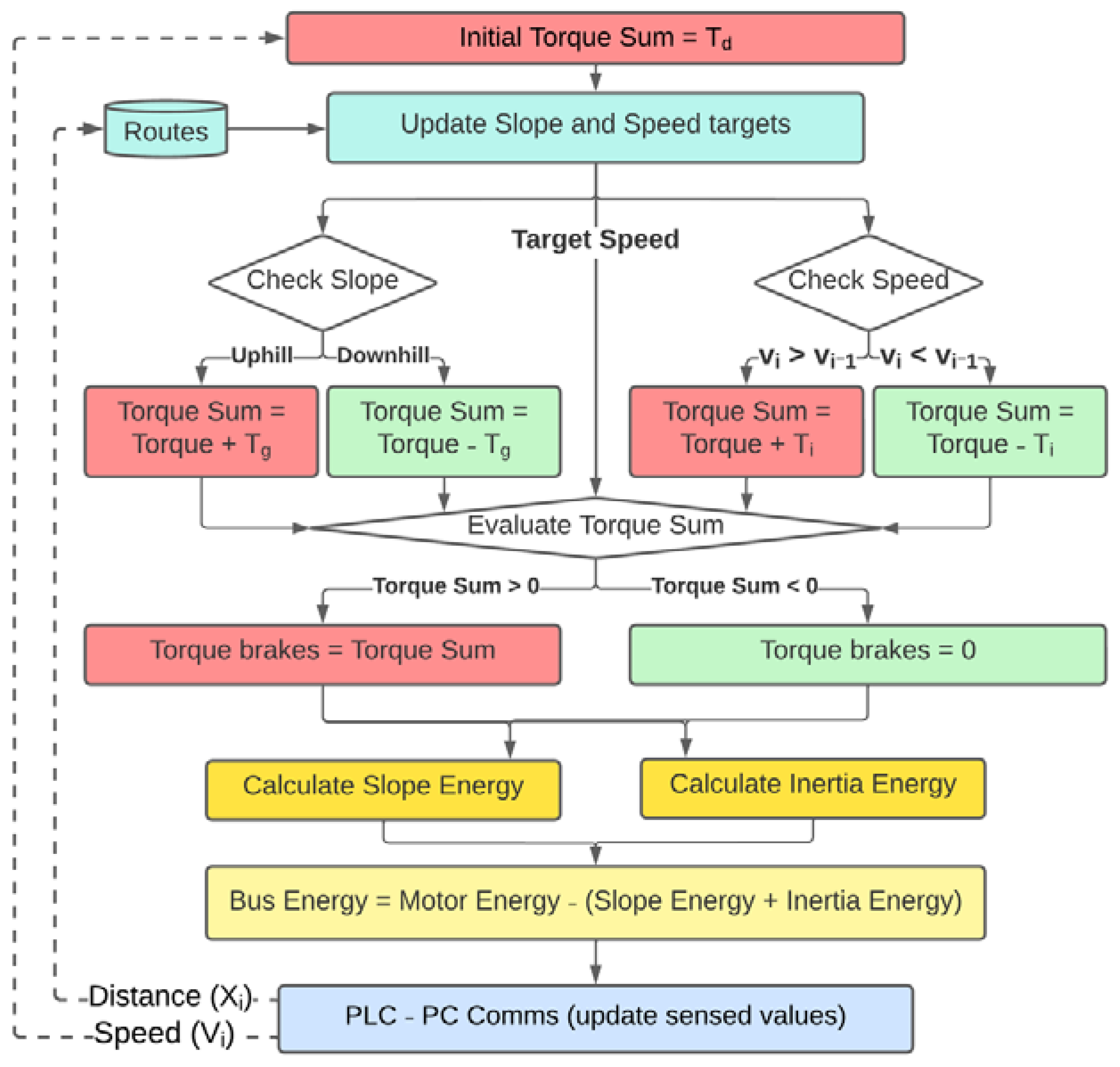
2.2.1. Energy Counting
2.2.2. Virtual Route Recreation
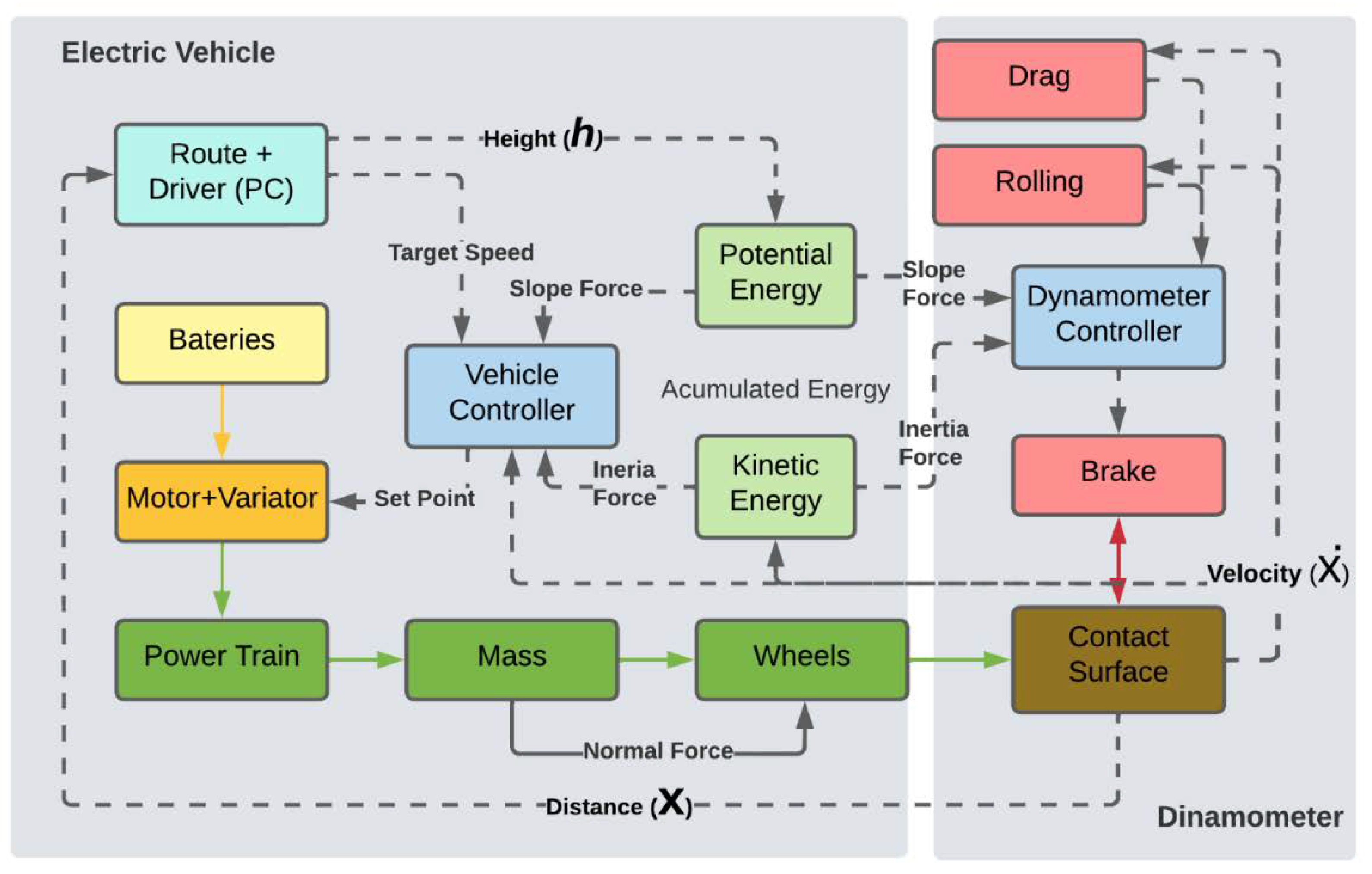
2.3. Emulation on the Dynamometer
Model Evaluation with Dynamometer Tests
3. Results
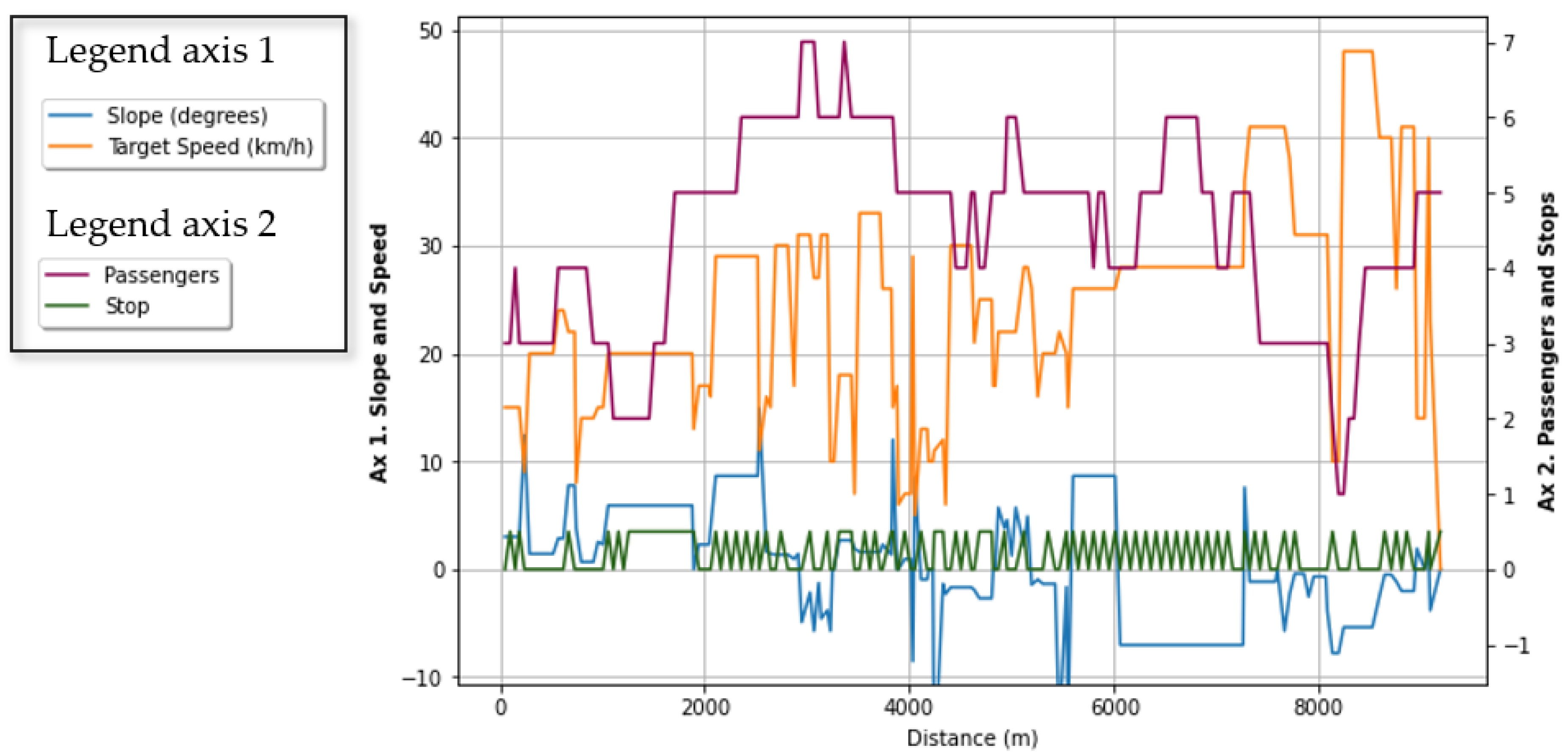
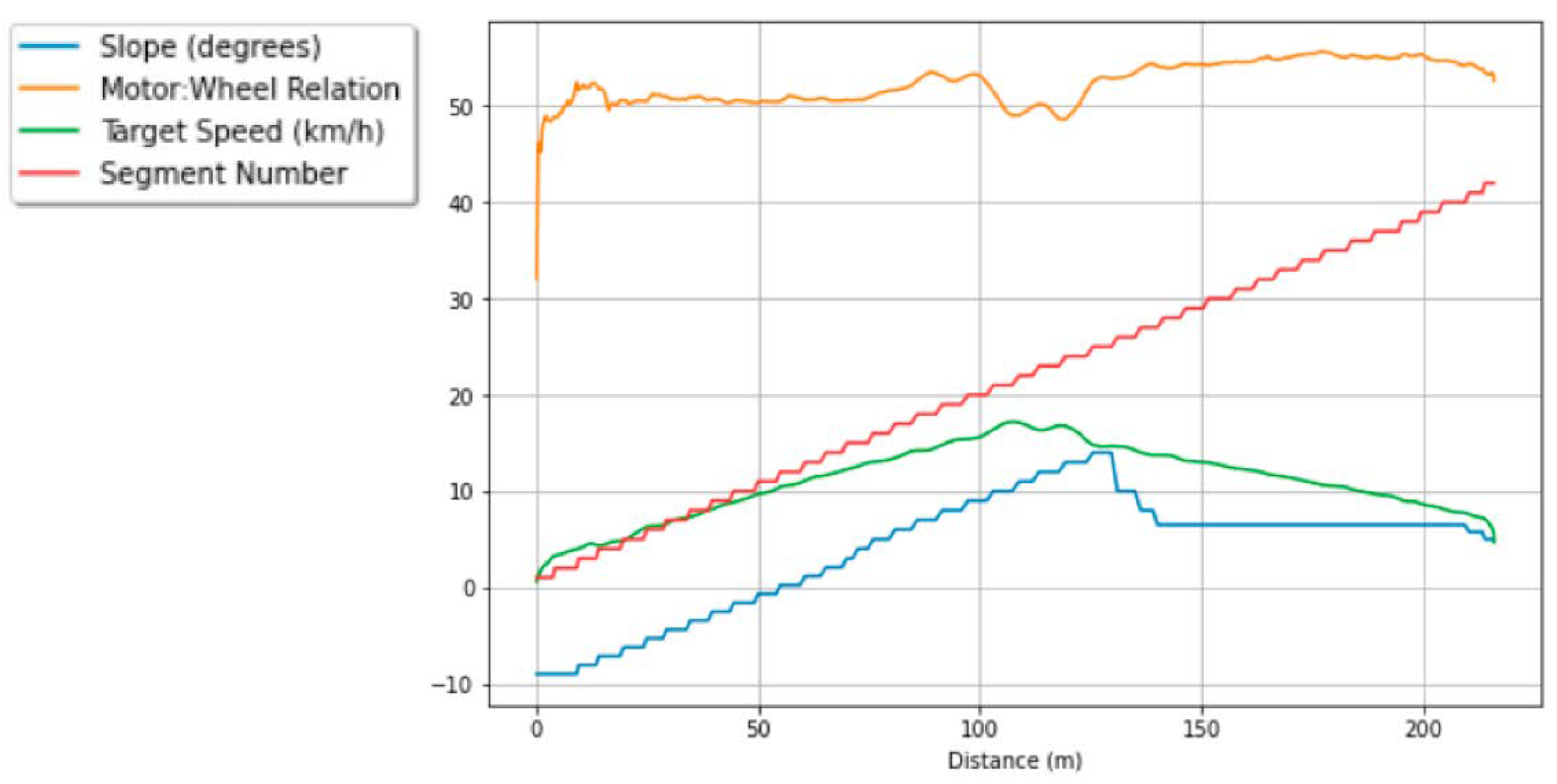
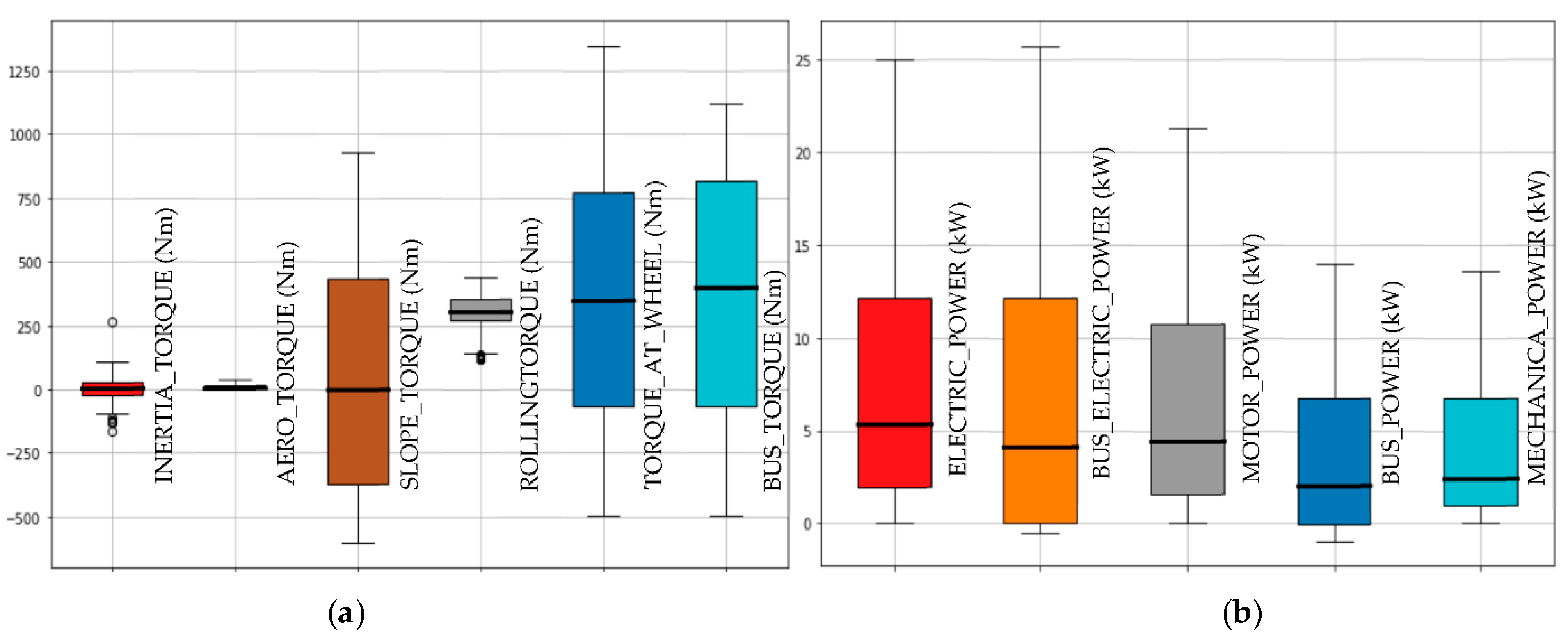
3.1. General Route Information and Data Overview
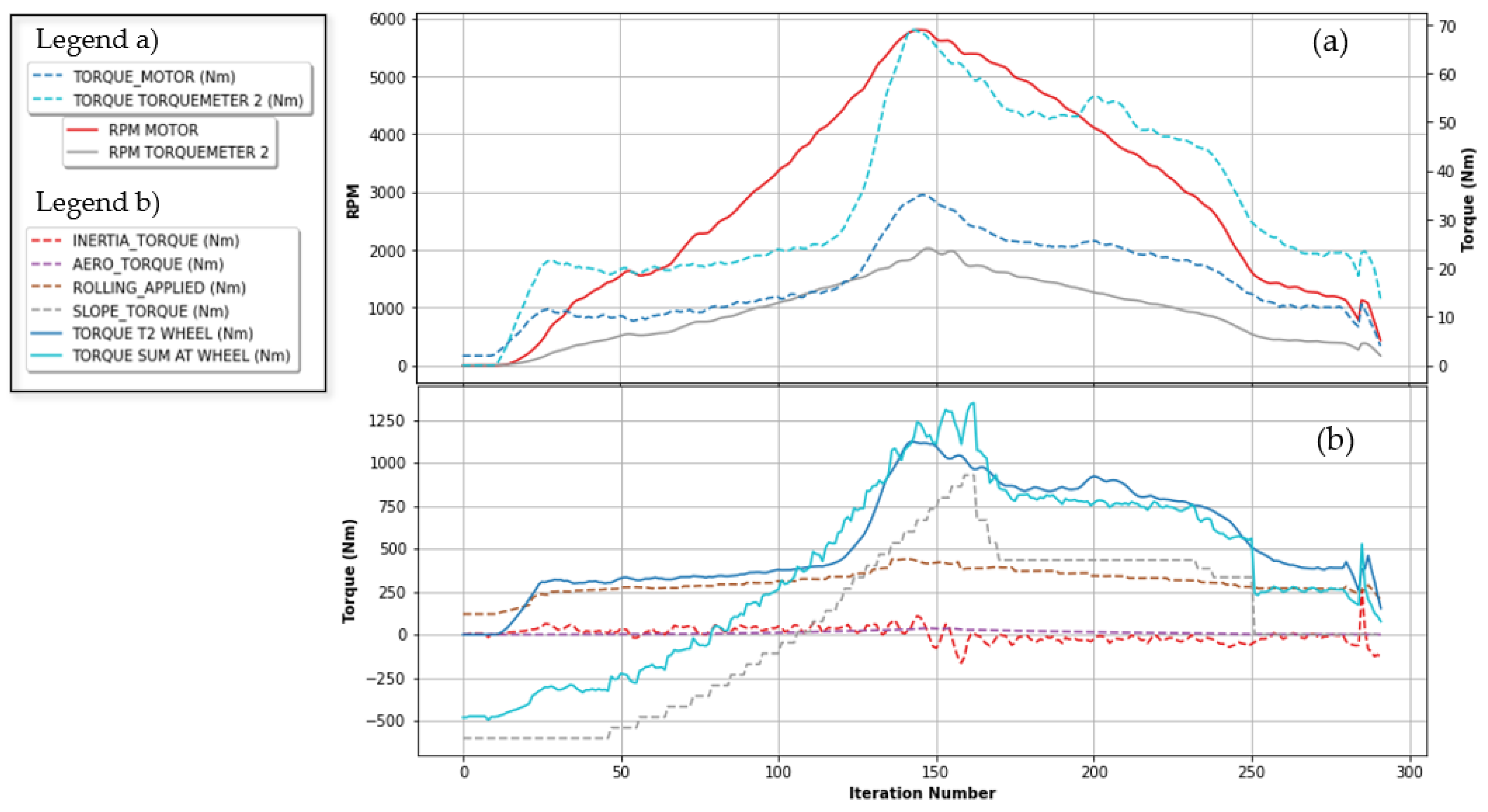
3.2. Analysis of Specific Torque Interactions
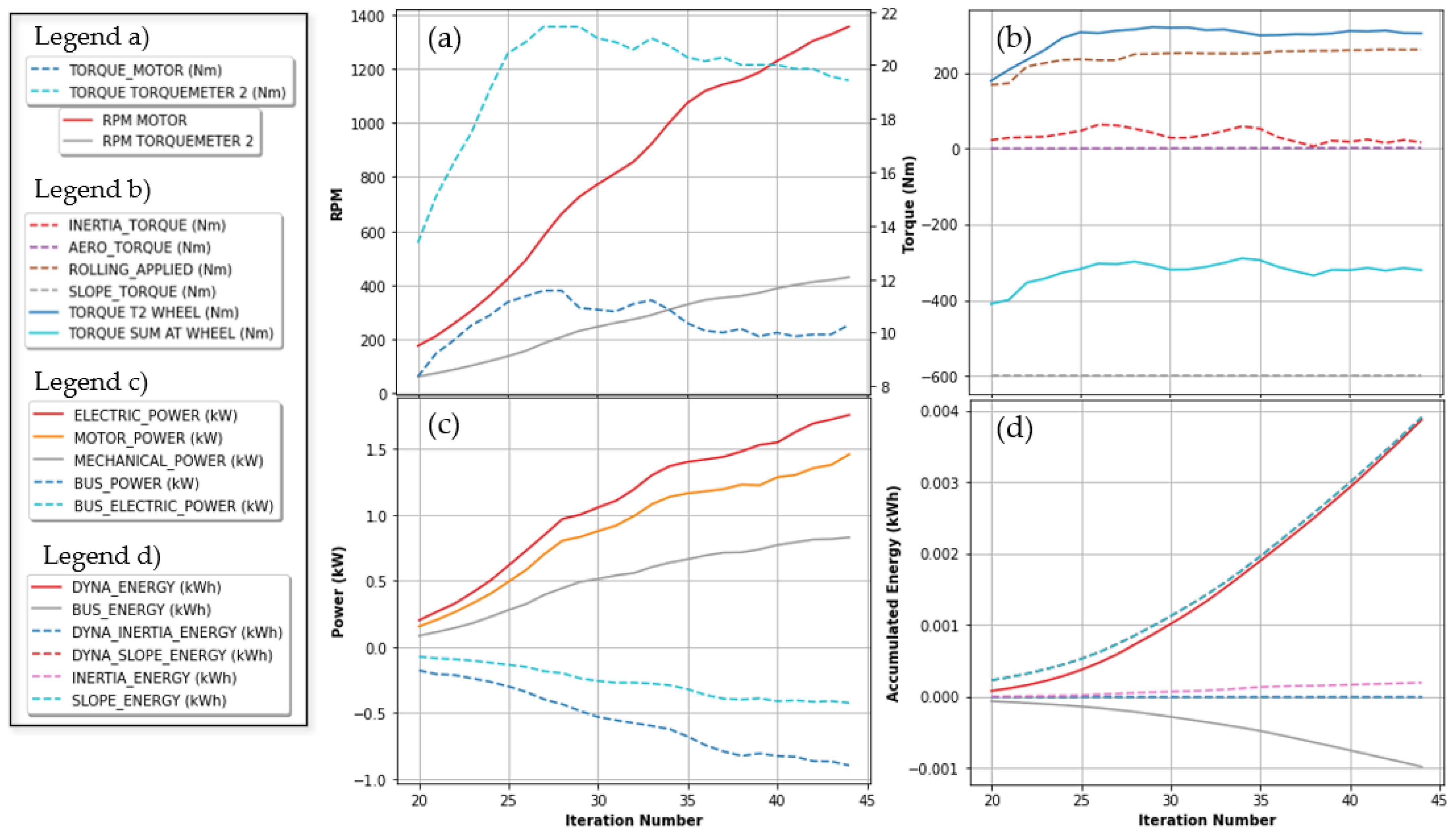
3.2.1. Accelerating Downhill Stretch with Constant Slope
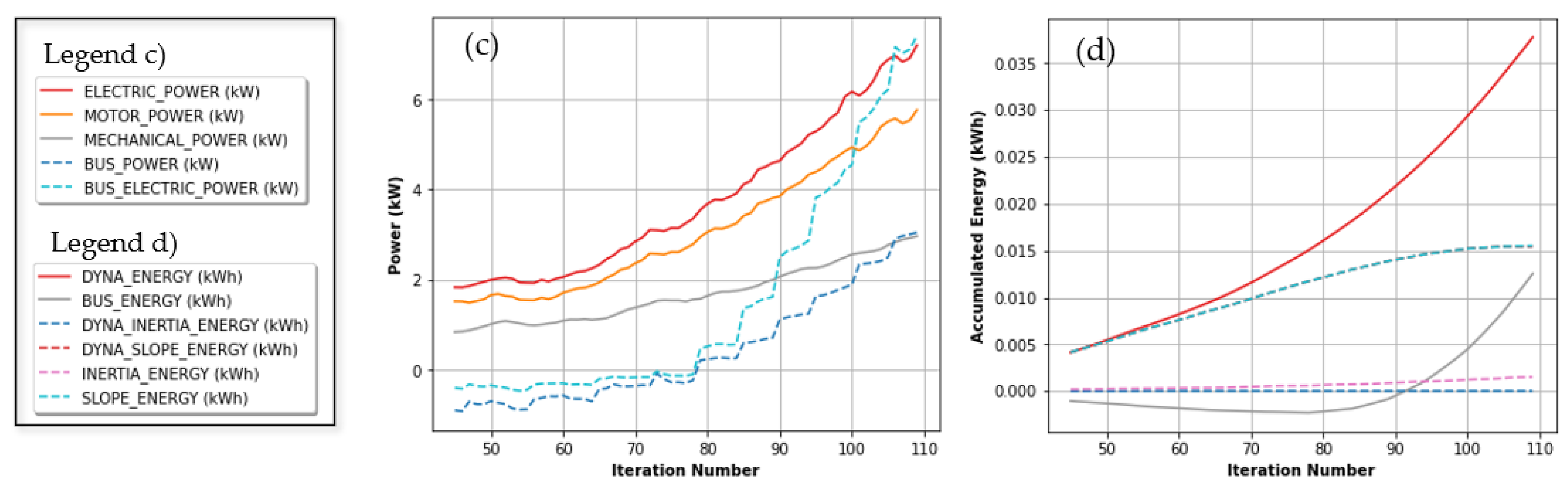
3.2.2. Downhill Section with Changing Slope
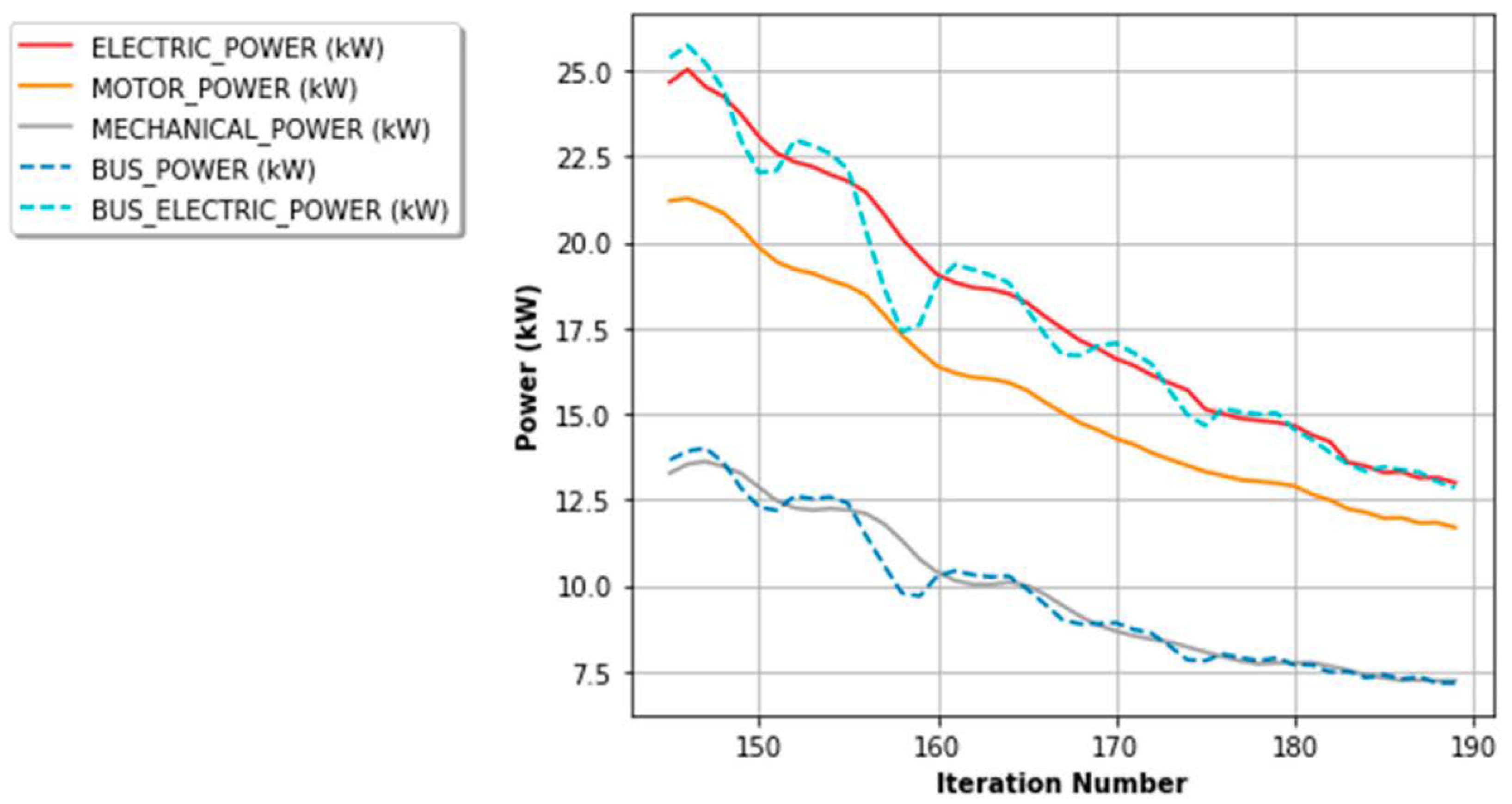
3.2.3. Accelerating Uphill Changing Section
4. Discussion
4.1. Inertia Torque Ripple and Iteration Time
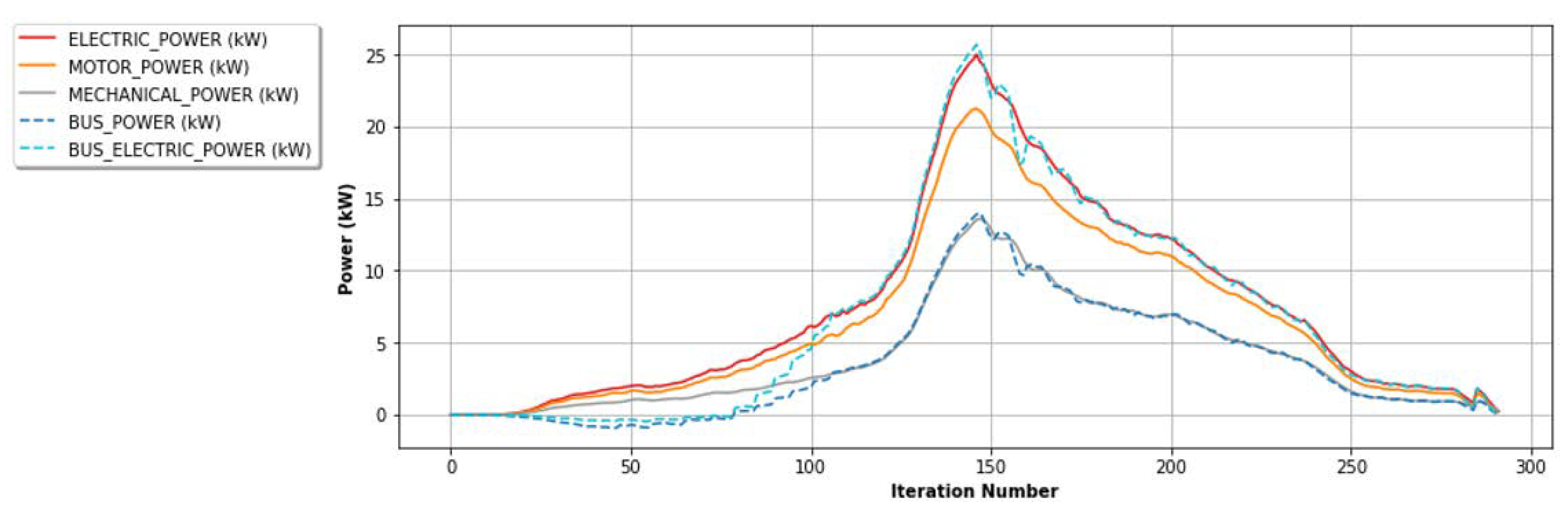
4.2. Energy Calculation Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
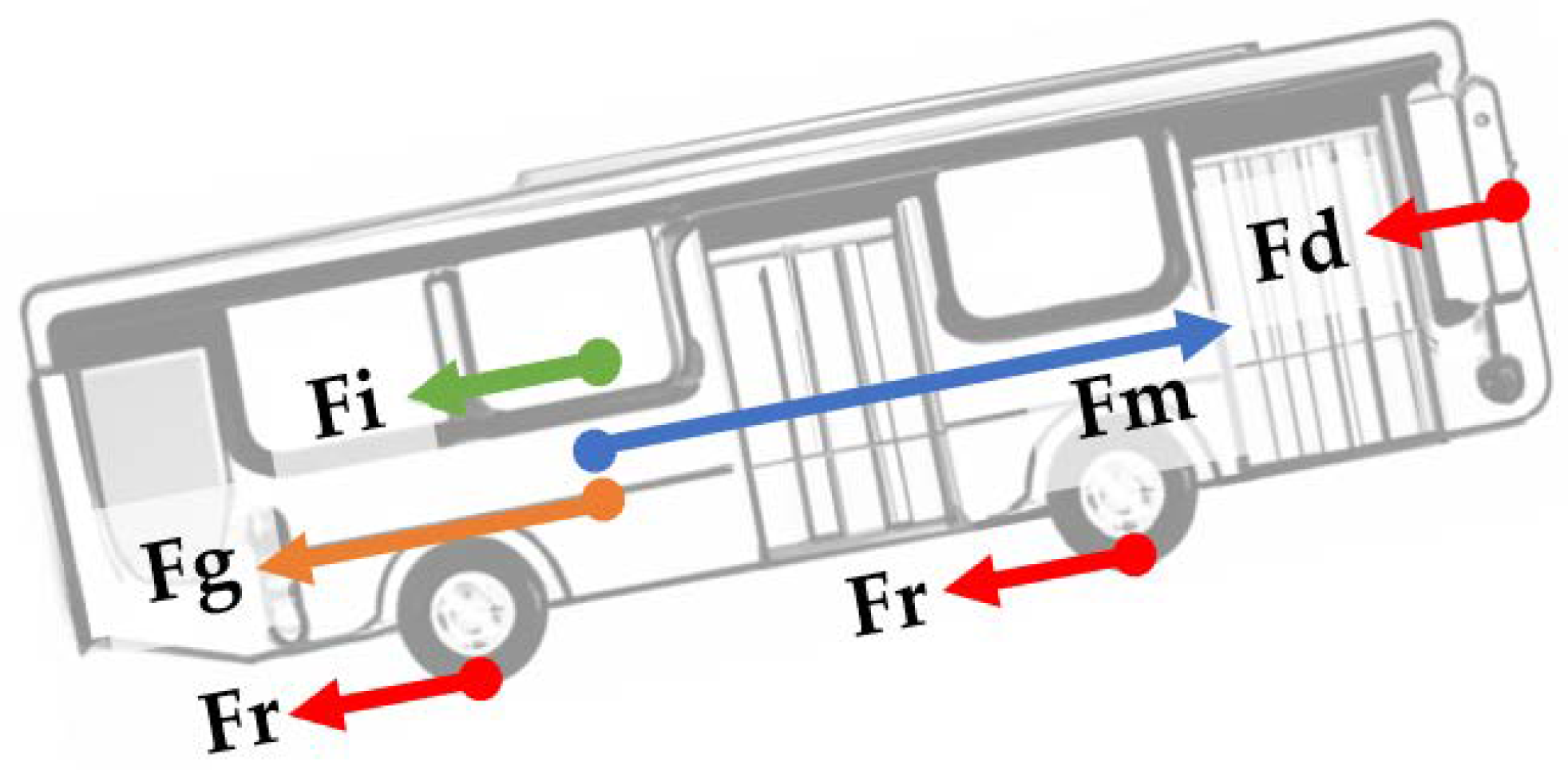
| motor driving force | |
| gravitational force | |
| rolling resistance force | |
| aerodynamic drag force | |
| inertia force, equivalent to in expression (1) and in expression (16) | |
| inertia torque | |
| motor torque, equivalent to ‘torque motor’ on the results section | |
| torque sum at wheel, equivalent to ’torque sum at wheel’ in the results section | |
| braking torque | |
| resultant force summatory at the wheel | |
| wheel radius | |
| angular speed of the motor | |
| angular speed of the wheels | |
| powertrain transmission efficiency from the motor to the wheels | |
| torque relation between the motor and the wheel | |
| inertia moment of elements on the motor side of the transmission | |
| inertia moment of elements on the wheel side of the transmission | |
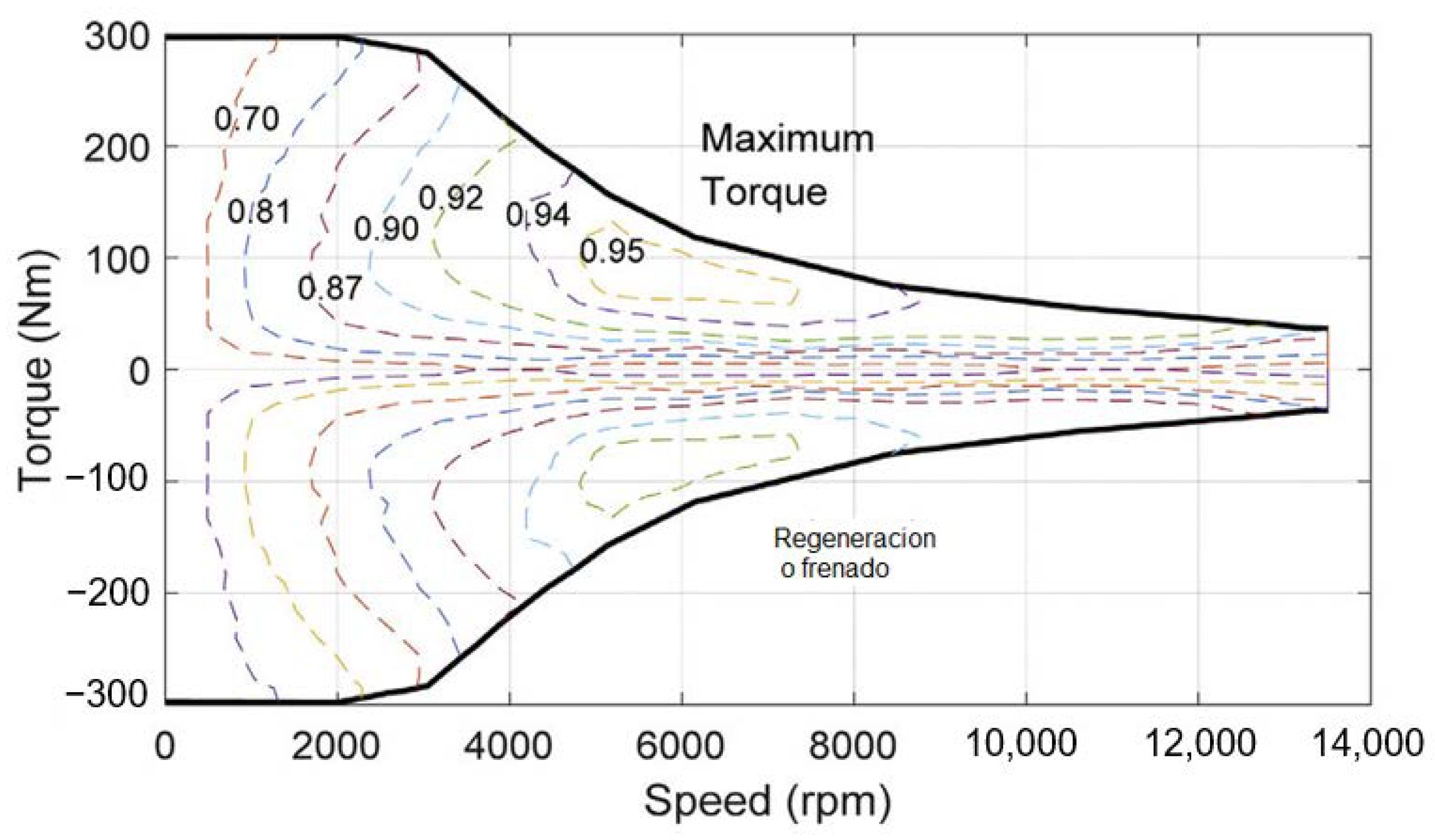
| %γ | throttle percentage |
| motor angular speed in terms of revolutions per minute | |
| motor efficiency | |
| ratio between vehicle speed and the reference speed for current segment of the route | |
| current distance traveled | |
| time elapsed since the start of the route | |
| parameters used for the input of route characteristics as stops or speed reductions | |
| indicates whether the vehicle is approaching a regular stop or a traffic light | |
| indicates the presence and distance of vehicles in front | |
| indicates a passenger’s request to stop | |
| indicates varying road conditions: humidity, sand on the road, visibility, etc. | |
| driver’s personality: calm, fast, aggressive | |
| regenerative braking torque | |
| percentage of braking performed by the regenerative braking | |
| linear acceleration of the vehicle | |
| current vehicle speed on the dynamometer | |
| angle of inclination of the route | |
| rolling coefficient of the road in relation to that of the dynamometer | |
| torque applied by the dynamometer brakes | |
| drag torque at the wheel | |
| rolling torque at the wheel | |
| air density | |
| vehicle mass, including that of the passengers | |
| drag coefficient of the vehicle front | |
| A | front area of the vehicle |
| tire pressure for the wheels | |
| bus rolling coefficient | |
| dynamometer rolling torque or friction | |
| dynamometer inertia moment | |
| dynamometer angular speed as measured after the main transmission element | |
| proportion of the motor torque that corresponds to slope simulation | |
| proportion of the motor torque that corresponds to inertia simulation | |
| time period between iterations | |
| iteration energy as obtained by iteration power and | |
| total energy for a route or segment | |
| bus height on the route | |
| theoretical bus force obtained from expression | |
| total force equivalent as applied on dynamometer brakes |
References
- Hanke, C.; Hüelsmann, M.; Fornahl, D. Socio-Economic Aspects of Electric Vehicles: A Literature Review. In Evolutionary Paths Towards the Mobility Patterns of the Future; Springer: Berlin, Germany, 2014; pp. 13–36. [Google Scholar] [CrossRef]
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Wu, Y.; Zhang, L. Can the development of electric vehicles reduce the emission of air pollutants and greenhouse gases in developing countries? Transp. Res. Part D Transp. Environ. 2017, 51, 129–145. [Google Scholar] [CrossRef]
- Arias-Cazco, D.; Rozas, H.; Jimenez, D.; Orchard, M.E.; Estevez, C. Unifying Criteria for Calculating the Levelized Cost of Driving in Electro-Mobility Applications. World Electr. Veh. J. 2022, 13, 119. [Google Scholar] [CrossRef]
- Zou, M.; Yang, Y.; Liu, M.; Wang, W.; Jia, H.; Peng, X.; Su, S.; Liu, D. Optimization Model of Electric Vehicles Charging and Discharging Strategy Considering the Safe Operation of Distribution Network. World Electr. Veh. J. 2022, 13, 117. [Google Scholar] [CrossRef]
- Wang, X.; González, J.A. Assessing Feasibility of Electric Buses in Small and Medium-Sized Communities. Int. J. Sustain. Transp. 2013, 7, 431–448. [Google Scholar] [CrossRef]
- Vita, V.; Koumides, P. Electric Vehicles and Distribution Networks: Analysis on Vehicle to Grid and Renewable Energy Sources Integration. In 2019 11th Electrical Engineering Faculty Conference (BulEF); IEEE: Varna, Bulgaria, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Energy-Efficient Trams and Trolley Buses|CIVITAS. Available online: https://civitas.eu/measure/energy-efficient-trams-and-trolley-buses (accessed on 26 July 2022).
- Kim, J.; Song, I.; Choi, W. An Electric Bus with a Battery Exchange System. Energies 2015, 8, 6806–6819. [Google Scholar] [CrossRef]
- Paramesh, K.; Neriya, R.; Kumar, M. Wireless Charging System for Electric Vehicles. Int. J. Veh. Struct. Syst. 2017, 9. [Google Scholar] [CrossRef]
- Bentalhik, I.; Lassioui, A.; EL Fadil, H.; Bouanou, T.; Rachid, A.; EL Idrissi, Z.; Hamed, A.M. Analysis, Design and Realization of a Wireless Power Transfer Charger for Electric Vehicles: Theoretical Approach and Experimental Results. World Electr. Veh. J. 2022, 13, 121. [Google Scholar] [CrossRef]
- Nodari, C.; Crispino, M.; Toraldo, E. From Traditional to Electrified Urban Road Networks: The Integration of Fuzzy Analytic Hierarchy Process and GIS as a Tool to Define a Feasibility Index—An Italian Case Study. World Electr. Veh. J. 2022, 13, 116. [Google Scholar] [CrossRef]
- Tram Systems ‘Too Costly and Underused’|Communities|The Guardian. Available online: https://www.theguardian.com/society/2004/apr/23/communities.politics (accessed on 26 July 2022).
- Gill, J.S.; Bhavsar, P.; Chowdhury, M.; Johnson, J.; Taiber, J.; Fries, R. Infrastructure Cost Issues Related to Inductively Coupled Power Transfer for Electric Vehicles. Procedia Comput. Sci. 2014, 32, 545–552. [Google Scholar] [CrossRef]
- How Is This A Good Idea?: EV Battery Swapping—IEEE Spectrum. Available online: https://spectrum.ieee.org/ev-battery-swapping-how-is-this-a-good-idea#toggle-gdpr (accessed on 26 July 2022).
- Gao, Z.; Lin, Z.; LaClair, T.J.; Liu, C.; Li, J.-M.; Birky, A.; Ward, J. Battery capacity and recharging needs for electric buses in city transit service. Energy 2017, 122, 588–600. [Google Scholar] [CrossRef]
- Lajunen, A. Energy consumption and cost-benefit analysis of hybrid and electric city buses. Transp. Res. Part C: Emerg. Technol. 2014, 38, 1–15. [Google Scholar] [CrossRef]
- Peng, K.; Wei, Z.; Chen, J.; Li, H. Hierarchical virtual inertia control of DC distribution system for plug-and-play electric vehicle integration. Int. J. Electr. Power Energy Syst. 2021, 128, 106769. [Google Scholar] [CrossRef]
- El-Taweel, N.A.; Zidan, A.; Farag, H.E.Z. Novel Electric Bus Energy Consumption Model Based on Probabilistic Synthetic Speed Profile Integrated With HVAC. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1517–1531. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Adaptive Multiresolution Energy Consumption Prediction for Electric Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10515–10525. [Google Scholar] [CrossRef]
- Pelkmans, L.; De Keukeleere, D.; Bruneel, H.; Lenaers, G. Influence of Vehicle Test Cycle Characteristics on Fuel Consumption and Emissions of City Buses. SAE Tech. Rap. 2001, 110, 1388–1398. [Google Scholar] [CrossRef]
- Adhi, R.P. Top-Down and Bottom-Up Method on Measuring CO2 Emission from Road-Based Transportation System (Case Study: Entire Gasoline Consumption, Bus Rapid Transit, and Highway in Metode Top-Down dan Bottom-Up Dalam Pengukuran Emisi CO 2 dari Sistem Transporta. J. Teknol. Lingkung. 2018, 19, 249–258. [Google Scholar] [CrossRef]
- Hu, X.; Murgovski, N.; Johannesson, L.; Egardt, B. Energy efficiency analysis of a series plug-in hybrid electric bus with different energy management strategies and battery sizes. Appl. Energy 2013, 111, 1001–1009. [Google Scholar] [CrossRef]
- Kivekäs, K.; Lajunen, A.; Vepsäläinen, J.; Tammi, K. City Bus Powertrain Comparison: Driving Cycle Variation and Passenger Load Sensitivity Analysis. Energies 2018, 11, 1755. [Google Scholar] [CrossRef]
- Perger, T.; Auer, H. Energy efficient route planning for electric vehicles with special consideration of the topography and battery lifetime. Energy Effic. 2020, 13, 1705–1726. [Google Scholar] [CrossRef]
- Zhang, C. Predictive Energy Management in Connected Vehicles: Utilizing Route Information Preview for Energy Saving. 2010. Available online: https://tigerprints.clemson.edu/all_dissertations/649/ (accessed on 26 July 2022).
- Ruan, J.; Walker, P.; Zhang, N. A comparative study energy consumption and costs of battery electric vehicle transmissions. Appl. Energy 2016, 165, 119–134. [Google Scholar] [CrossRef]
- Merkisz, J.; Pielecha, J. Emissions and fuel consumption during road test from diesel and hybrid buses under real road conditions. In Proceedings of the 2010 IEEE Vehicle Power Propuls. Conference VPPC 2010, Lille, France, 1–3 September 2010; pp. 2–6. [Google Scholar] [CrossRef]
- Tica, S.; Živanović, P.; Bajčetić, S.; Milovanović, B.; Nađ, A. Study of the fuel efficiency and ecological aspects of CNG buses in urban public transport in Belgrade. J. Appl. Eng. Sci. 2019, 17, 65–73. [Google Scholar] [CrossRef]
- Keramydas, C.; Papadopoulos, G.; Ntziachristos, L.; Lo, T.-S.; Ng, K.-L.; Wong, H.-L.A.; Wong, C.K.-L. Real-World Measurement of Hybrid Buses’ Fuel Consumption and Pollutant Emissions in a Metropolitan Urban Road Network. Energies 2018, 11, 2569. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Mathes, M.; Käsgen, J.; Robert, K.; Mayrock, M.; Van Mierlo, J.; Berecibar, M. Optimization and Analysis of Electric Vehicle Operation with Fast-Charging Technologies. World Electr. Veh. J. 2022, 13, 20. [Google Scholar] [CrossRef]
- Wang, A.; Ge, Y.; Tan, J.; Fu, M.; Shah, A.N.; Ding, Y.; Zhao, H.; Liang, B. On-road pollutant emission and fuel consumption characteristics of buses in Beijing. J. Environ. Sci. 2011, 23, 419–426. [Google Scholar] [CrossRef]
- Beckers, C.J.J.; Besselink, I.J.M.; Frints, J.J.M.; Nijmeijer, H. Energy Consumption Prediction for Electric City Buses Citation for Published Version (APA): Energy Consumption Prediction for Electric City Buses. 2019. Available online: https://pure.tue.nl/ws/portalfiles/portal/205351828/20220628_Beckers_hf.pdf (accessed on 26 July 2022).
- Soltic, P.; Guzzella, L. Optimum SI Engine Based Powertrain Systems for Lightweight Passenger Cars. In SAE Technical Papers; SAE International: Warrendale, PA, USA, 2000. [Google Scholar] [CrossRef]
- Carlson, R.B.; Wishart, J.; Stutenberg, K. On-Road and Dynamometer Evaluation of Vehicle Auxiliary Loads. SAE Int. J. Fuels Lubr. 2016, 9, 260–268. [Google Scholar] [CrossRef]
- Singh, N. Fuel Economy Variability Investigations: From Test Cells to Real World. In SAE Technical Papers; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Szumska, E.; Jurecki, R.; Pawełczyk, M. Evaluation of the use of hybrid electric powertrain system in urban traffic conditions. Eksploat. i Niezawodn. 2020, 22, 154–160. [Google Scholar] [CrossRef]
- Mayyas, A.; Prucka, R.; Pisu, P.; Haque, I. Chassis Dynamometer as a Development Platform for Vehicle Hardware In-the-Loop “VHiL”. SAE Int. J. Commer. Veh. 2013, 6, 257–267. [Google Scholar] [CrossRef]
- William, C., Jr.; Dmitry, S. Dynamometer for Simulating the Inertial and Road Load Forces Encountered by Motor Vehicles and Method. US5445013. 1995. Available online: https://patents.google.com/patent/US5445013A/en (accessed on 23 June 2022).
- Zhang, X.; Zhou, Z. Research on Development of Vehicle Chassis Dynamometer. J. Phys. Conf. Ser. 2020, 1626. [Google Scholar] [CrossRef]
- Lohse-Busch, H.; Duoba, M.; Rask, E.; Stutenberg, K.; Gowri, V.; Slezak, L.; Anderson, D. Ambient temperature (20 °F, 72 °F and 95 °F) impact on fuel and energy consumption for several conventional vehicles, hybrid and plug-in hybrid electric vehicles and battery electric vehicle. SAE Tech. Pap. 2013, 2. [Google Scholar] [CrossRef]
- Kongjian, Q.; Minggao, O.; Qingchun, L.; Maodong, F.; Jidong, G.; Junhua, G. Development and validation of emissions and fuel economy test procedures for heavy duty hybrid electric vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–5. [Google Scholar] [CrossRef]
- Mayyas, A.R.O.; Kumar, S.; Pisu, P.; Rios, J.; Jethani, P. Model-based design validation for advanced energy management strategies for electrified hybrid power trains using innovative vehicle hardware in the loop (VHIL) approach. Appl. Energy 2017, 204, 287–302. [Google Scholar] [CrossRef]
- Zha, H.; Zong, Z. Emulating electric vehicle’s mechanical inertia using an electric dynamometer. In Proceedings of the 2010 International Conference on Measuring Technology and Mechatronics Automation, ICMTMA 2010, Changsha, China, 13–14 March 2010; Volume 2, pp. 100–103. [Google Scholar] [CrossRef]
- Thompson, J.K.; Marks, A.; Rhode, D. Inertia simulation in brake dynamometer testing. SAE Techn. Pap. 2002, 10, 2601. [Google Scholar] [CrossRef]
- Butler, K.; Ehsani, M.; Kamath, P. A Matlab-based modeling and simulation package for electric and hybrid electric vehicle design. IEEE Trans. Veh. Technol. 1999, 48, 1770–1778. [Google Scholar] [CrossRef] [Green Version]
- Husain, I.; Islam, M.S. Design, Modeling and Simulation of an Electric Vehicle System. SAE Techn. Pap. 1999, 10, 1149. [Google Scholar] [CrossRef]
- Malkin, P.; Bisagni, C.; Golinska, P.; Schmitt, D.; Salvato, F. STRIA roadmap on ‘Vehicle Design & Manufacturing’. 2016. Available online: https://trimis.ec.europa.eu/sites/default/files/2021-04/stria_roadmap_-_vehicle_design_and_manufacturing.pdf (accessed on 23 June 2022).
- Miller, T.; Rizzoni, G.; Li, Q. Simulation-Based Hybrid-Electric Vehicle Design Search. SAE Techn. Pap. 1999, 10, 1150. [Google Scholar] [CrossRef]
- Bhatt, A. Planning and Application of Electric Vehicle with MATLAB®/simulink®. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems, PEDES 2016, Melaka, Malaysia, 28–29 November 2016; Volume 2016-Janua, pp. 1–6. [Google Scholar] [CrossRef]
- Pathak, A.; Scheuermann, S.; Ongel, A.; Lienkamp, M. Conceptual Design Optimization of Autonomous Electric Buses in Public Transportation. World Electr. Veh. J. 2021, 12, 30. [Google Scholar] [CrossRef]
- Bottiglione, F.; de Pinto, S.; Mantriota, G.; Sorniotti, A. Energy Consumption of a Battery Electric Vehicle with Infinitely Variable Transmission. Energies 2014, 7, 8317–8337. [Google Scholar] [CrossRef]
- Xu, Y.; Zheng, Y.; Yang, Y. On the movement simulations of electric vehicles: A behavioral model-based approach. Appl. Energy 2021, 283, 116356. [Google Scholar] [CrossRef]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Göhlich, D.; Fay, T.-A.; Jefferies, D.; Lauth, E.; Kunith, A.; Zhang, X. Design of urban electric bus systems. Des. Sci. 2018, 4. [Google Scholar] [CrossRef]
- Shimizu, K.-I.; Nihei, M.; Okamoto, T. Fuel Consumption Test Method for 4WD HEVs – On a Necessity of Double Axis Chassis Dynamometer Test. World Electr. Veh. J. 2008, 2, 253–263. [Google Scholar] [CrossRef]
- Yang, Z.; Deng, B.; Deng, M.; Huang, S. An Overview of Chassis Dynamometer in the Testing of Vehicle Emission. MATEC Web Conf. 2018, 175, 02015. [Google Scholar] [CrossRef]
- Jaworski, A.; Mądziel, M.; Lew, K.; Campisi, T.; Woś, P.; Kuszewski, H.; Wojewoda, P.; Ustrzycki, A.; Balawender, K.; Jakubowski, M. Evaluation of the Effect of Chassis Dynamometer Load Setting on CO2 Emissions and Energy Demand of a Full Hybrid Vehicle. Energies 2021, 15, 122. [Google Scholar] [CrossRef]
- Tsanakas, N.; Ekström, J.; Olstam, J. Generating virtual vehicle trajectories for the estimation of emissions and fuel consumption. Transp. Res. Part C Emerg. Technol. 2022, 138, 103615. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Decelerating | Constant Speed | Accelerating | |
|---|---|---|---|
| Flat | Work (EV Sim) Braking (EV Sim) Regeneration (EV Sim) Inertia (EV Sim) | Work (Motor) | Work (Motor) Inertia (Motor) |
| Uphill | Work (EV Sim) Braking (EV Sim) Regeneration (EV Sim) Slope (Motor) Inertia (Motor) | Work (EV Sim) Slope (Motor) | Work (Motor) Inertia (Motor) Slope (Motor) |
| Downhill | Braking (EV Sim) Regeneration (EV Sim) Inertia (EV Sim) | Braking (EV Sim) Regeneration (EV Sim) | Work (EV Sim) Braking (EV Sim) Regeneration (EV Sim) Inertia (EV Sim) |
| Dyna Energy (kWh) | Bus Energy (kWh) | Dyna Inertia Energy (kWh) | Dyna Slope Energy (kWh) | Inertia Energy (kWh) | Slope Energy (kWh) | |
|---|---|---|---|---|---|---|
| Mean | 0.1344 | 0.1153 | 0.0014 | 0.0122 | 0.0039 | 0.0459 |
| Std | 0.1190 | 0.1132 | 0.0016 | 0.0054 | 0.0031 | 0.0380 |
| Min | 0.0000 | −0.0023 | 0.0000 | 0.0000 | 0.0000 | 0.0000 |
| 25% | 0.0127 | 0.0000 | 0.0000 | 0.0105 | 0.0006 | 0.0105 |
| 50% | 0.1104 | 0.0872 | 0.0000 | 0.0155 | 0.0038 | 0.0348 |
| 75% | 0.2636 | 0.2392 | 0.0030 | 0.0155 | 0.0071 | 0.0876 |
| Max | 0.3021 | 0.2769 | 0.0041 | 0.0155 | 0.0083 | 0.0966 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arango, I.; Escobar, D. Integration of a Chassis Servo-Dynamometer and Simulation to Increase Energy Consumption Accuracy in Vehicles Emulating Road Routes. World Electr. Veh. J. 2022, 13, 164. https://doi.org/10.3390/wevj13090164
Arango I, Escobar D. Integration of a Chassis Servo-Dynamometer and Simulation to Increase Energy Consumption Accuracy in Vehicles Emulating Road Routes. World Electric Vehicle Journal. 2022; 13(9):164. https://doi.org/10.3390/wevj13090164
Chicago/Turabian StyleArango, Ivan, and Daniel Escobar. 2022. "Integration of a Chassis Servo-Dynamometer and Simulation to Increase Energy Consumption Accuracy in Vehicles Emulating Road Routes" World Electric Vehicle Journal 13, no. 9: 164. https://doi.org/10.3390/wevj13090164
APA StyleArango, I., & Escobar, D. (2022). Integration of a Chassis Servo-Dynamometer and Simulation to Increase Energy Consumption Accuracy in Vehicles Emulating Road Routes. World Electric Vehicle Journal, 13(9), 164. https://doi.org/10.3390/wevj13090164