

Research on Control Strategy of APSO-Optimized Fuzzy PID for Series Hybrid Tractors

Abstract
:1. Introduction
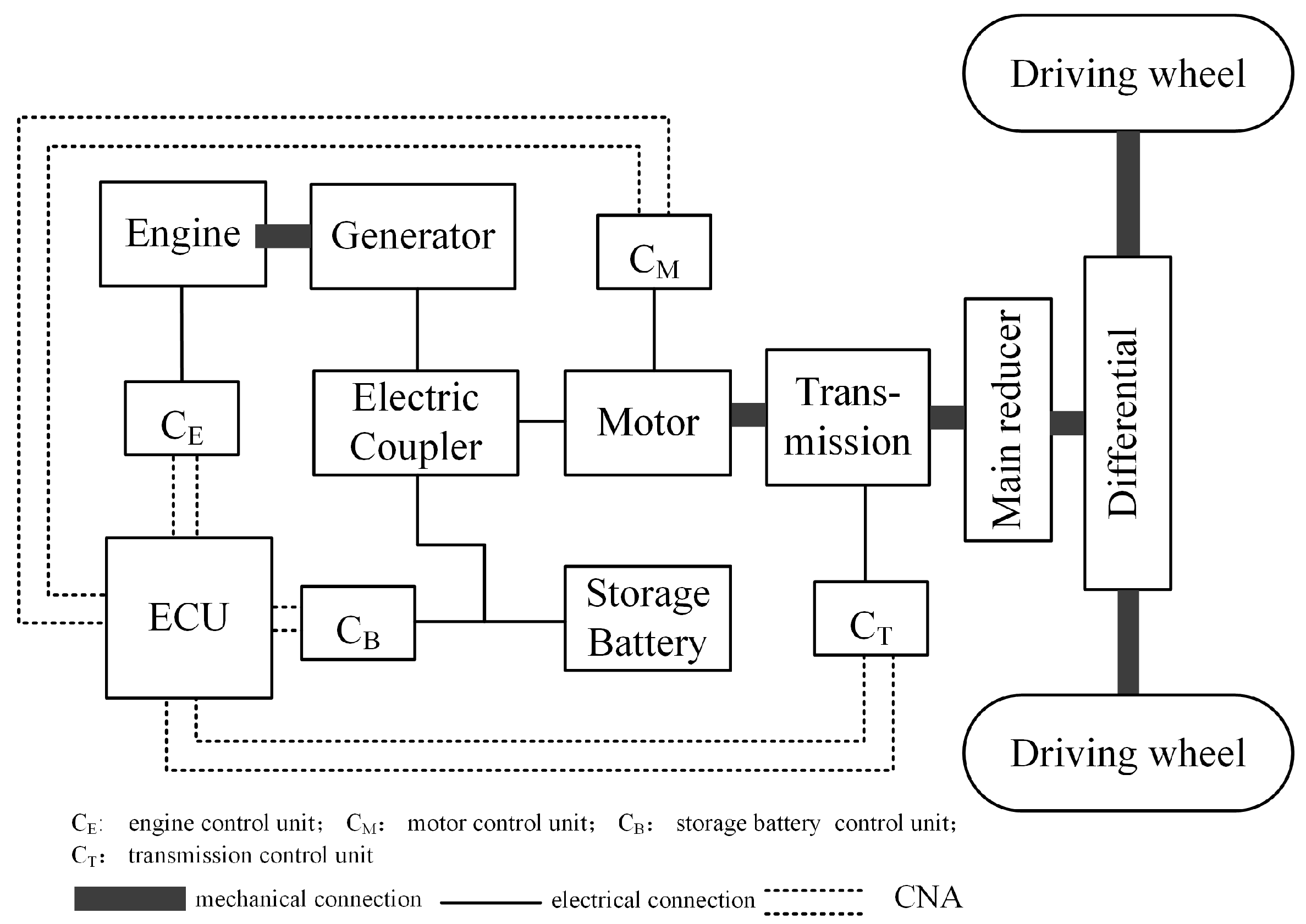
2. Power System Structure Design and Parameter Selection
- Pure electric driving mode: Storage Battery → Electric Coupler → Motor → Transmission Device → Driving Wheel.
- Pure engine driving mode: Engine → Generator → Electric Coupler → Motor → Transmission Device → Driving Wheel.
- Hybrid driving mode: Engine → Generator → Storage Battery → Electric Coupler → Motor → Transmission Device → Driving Wheel.
- Driving with charging mode: The energy flows in two ways. Driving mode: Engine → Generator → Electric Coupler → Motor → Transmission Device → Driving Wheel; Charging mode: Engine → Generator → Electric Coupler → Storage Battery.
3. Control Strategy
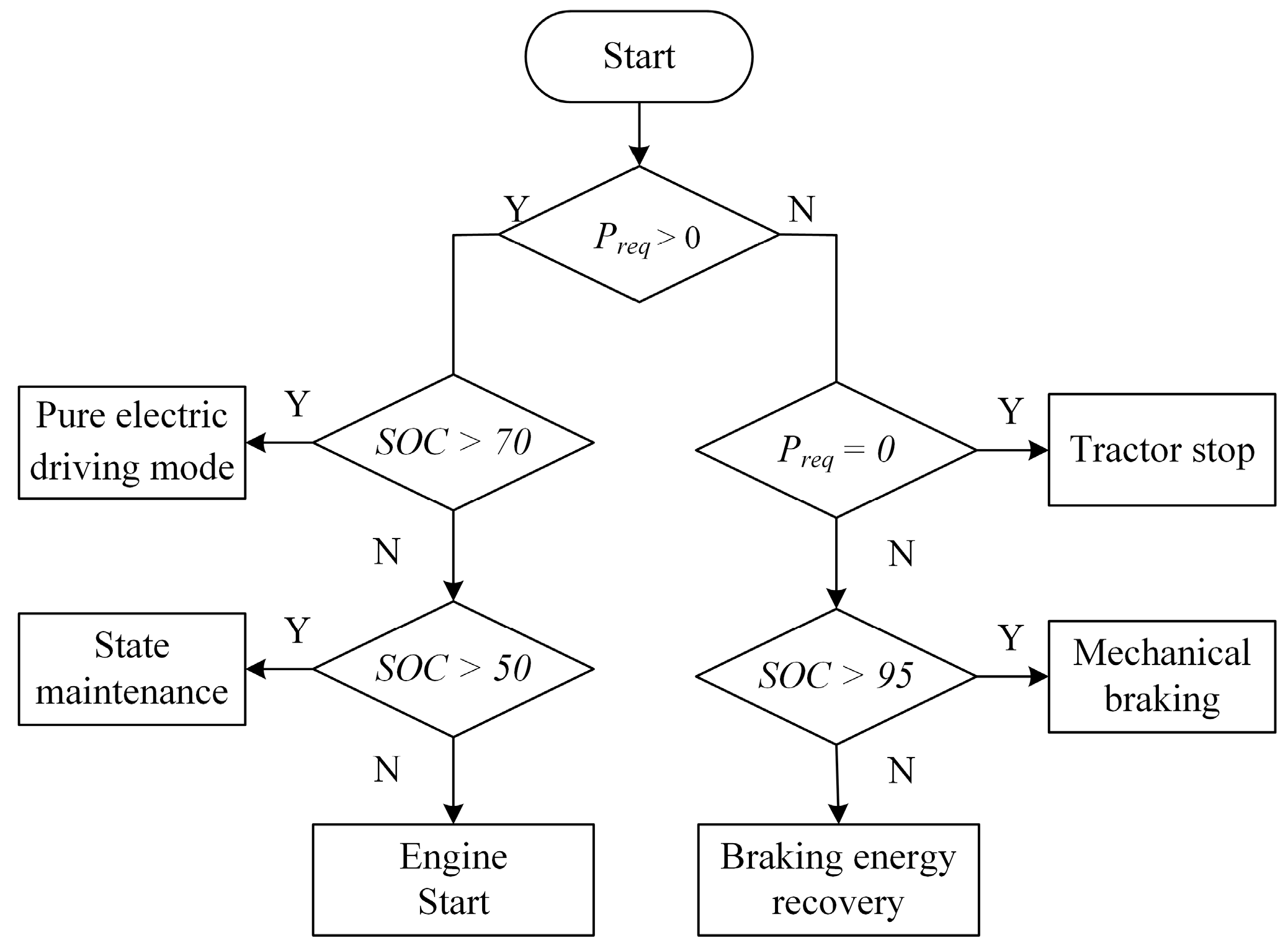
3.1. The Rule-Based Control Strategy
3.2. MOPFPCS
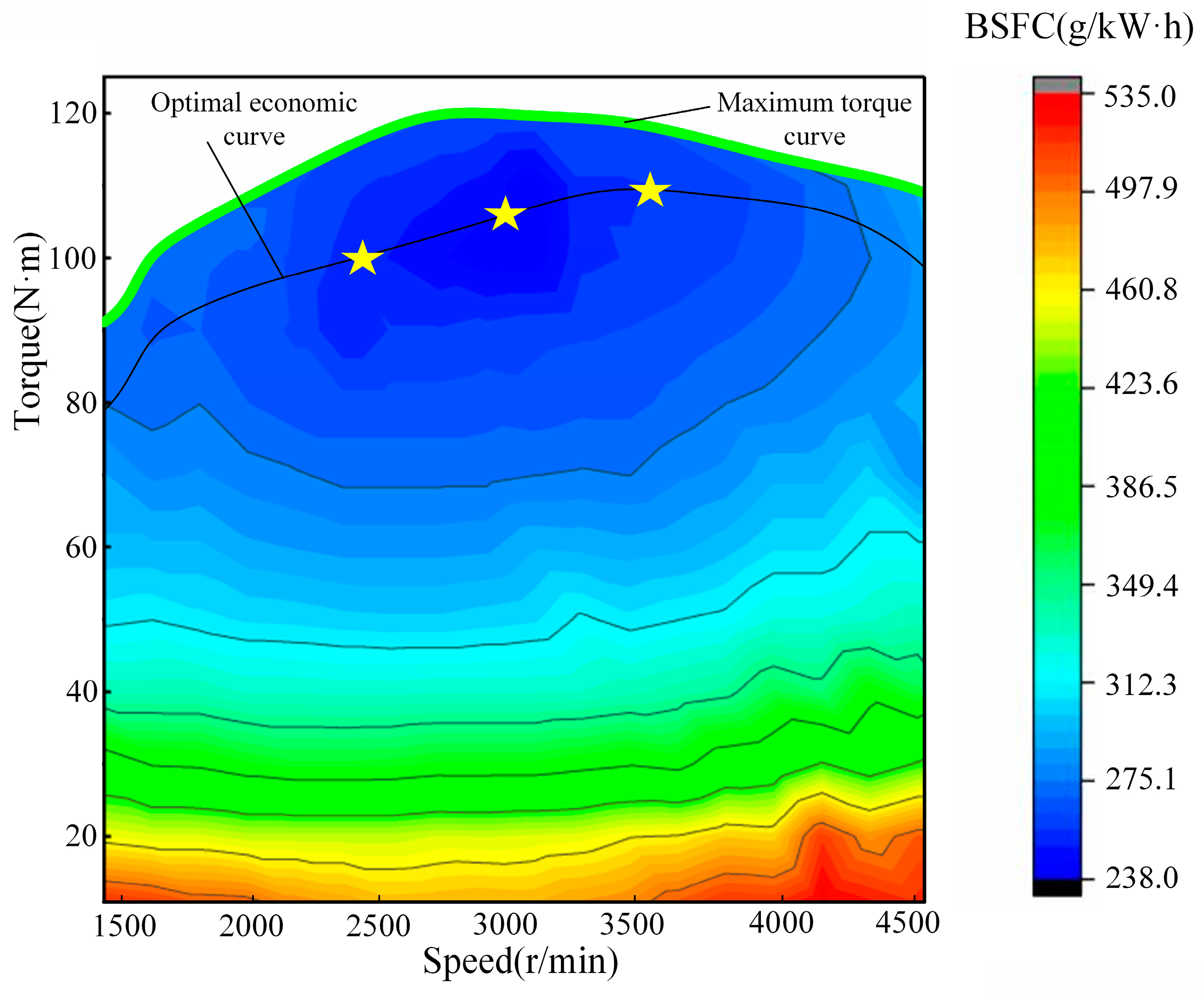
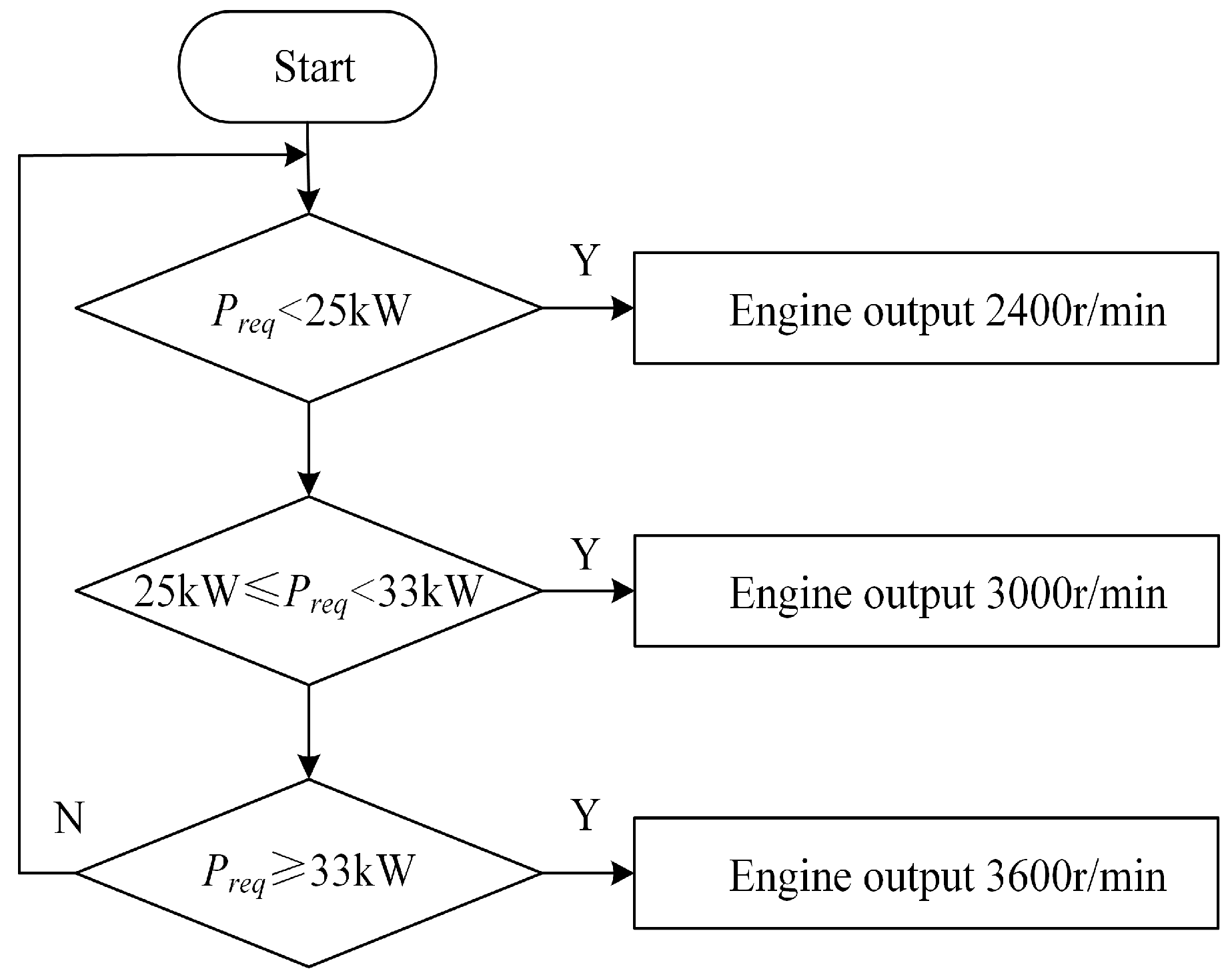
3.2.1. Determination of Multi-Operating Point
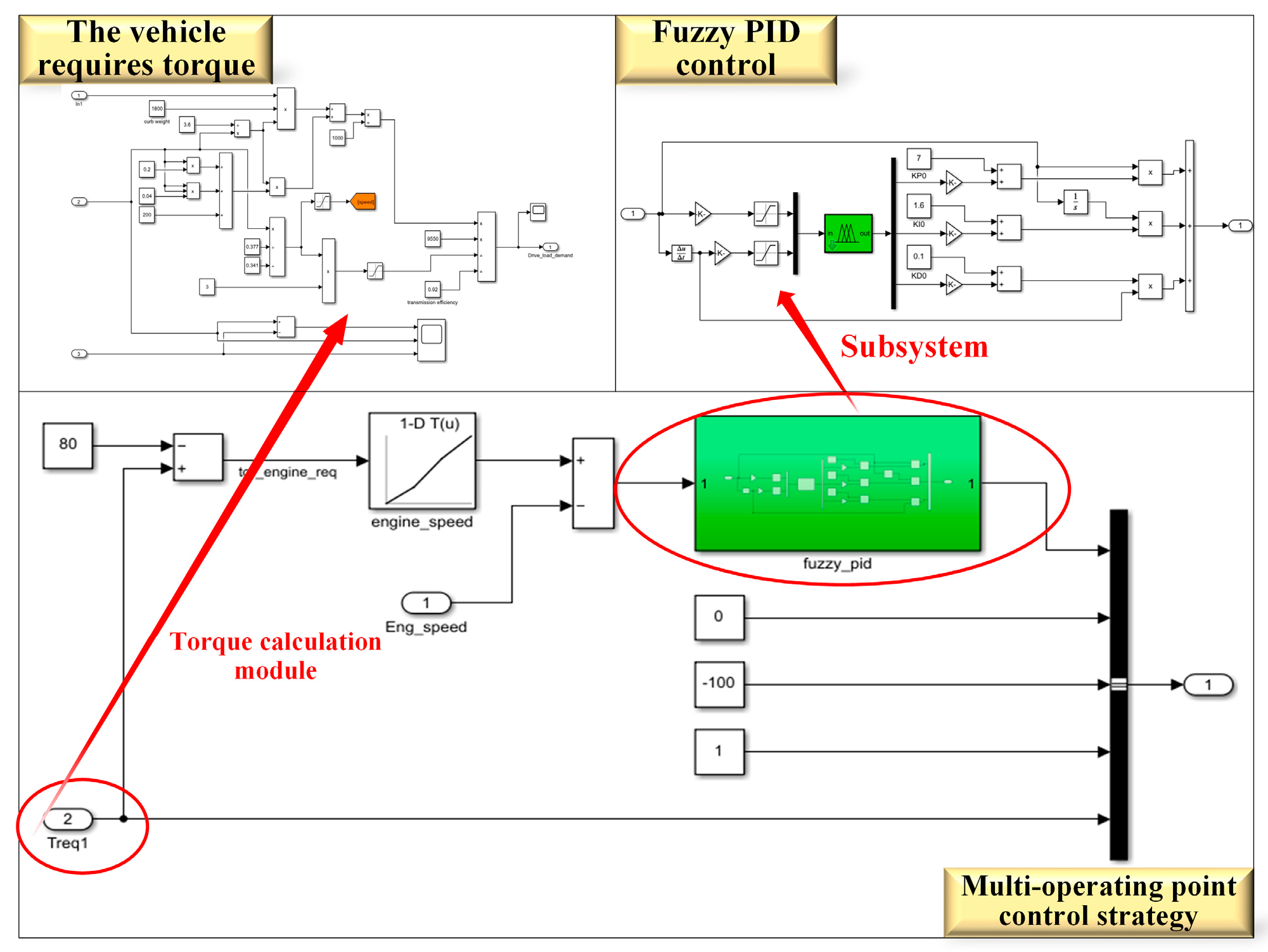
3.2.2. Fuzzy PID Control
- When |e| is large, to improve the system response speed, Kp should be increased. Simultaneously, to avoid excessive integral saturation, Kd should be decreased, and Ki is often set to 0.
- When |e| is moderate, to reduce the system overshoot, it is common to decrease Kp. and Ki can be appropriately increased to enhance the system’s regulation accuracy.
- When |e| is small, to improve system stability, Kp and Ki should be increased. Simultaneously, Kd should select a moderate value to prevent system oscillations near the equilibrium point.
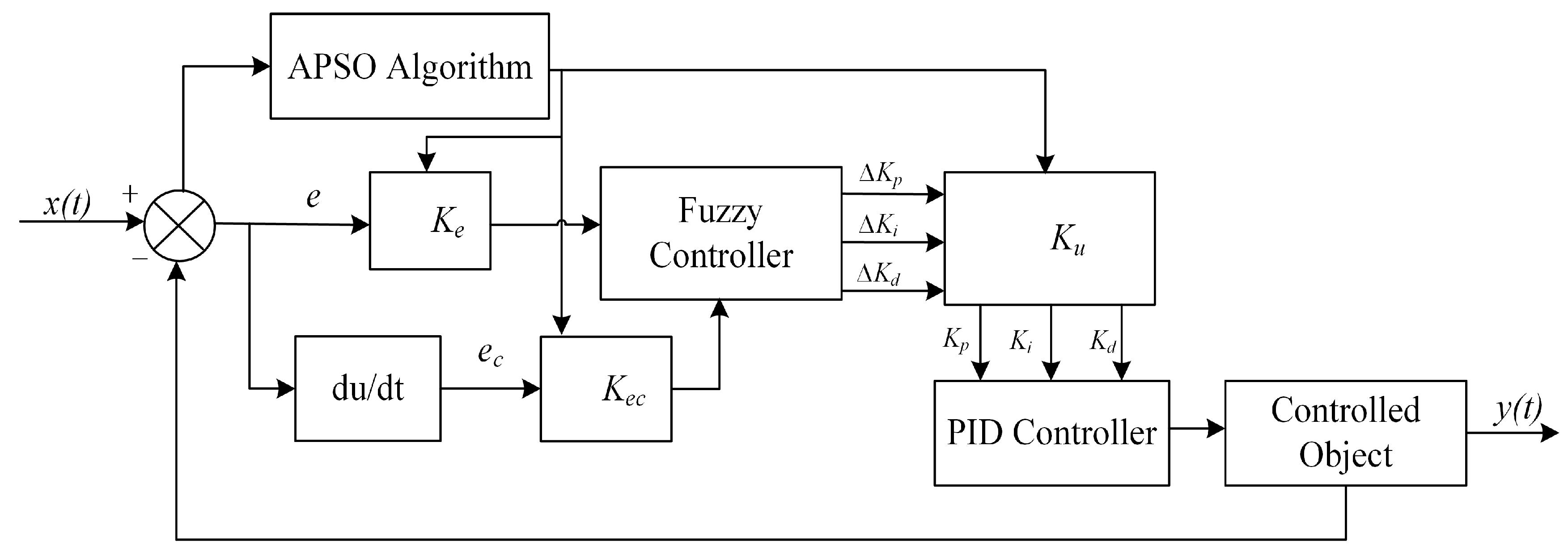
3.3. APSO-Optimized Fuzzy PID Controller
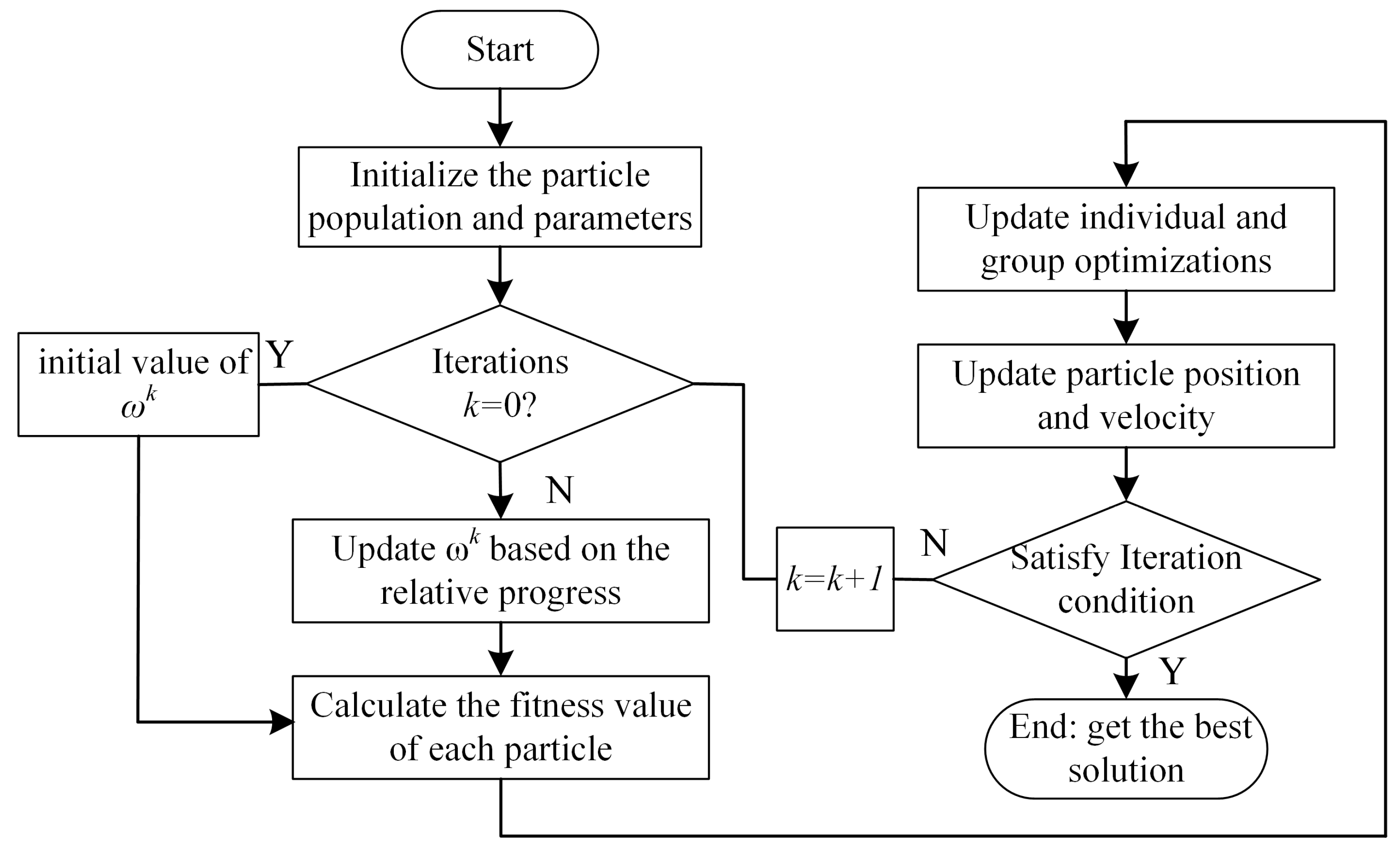
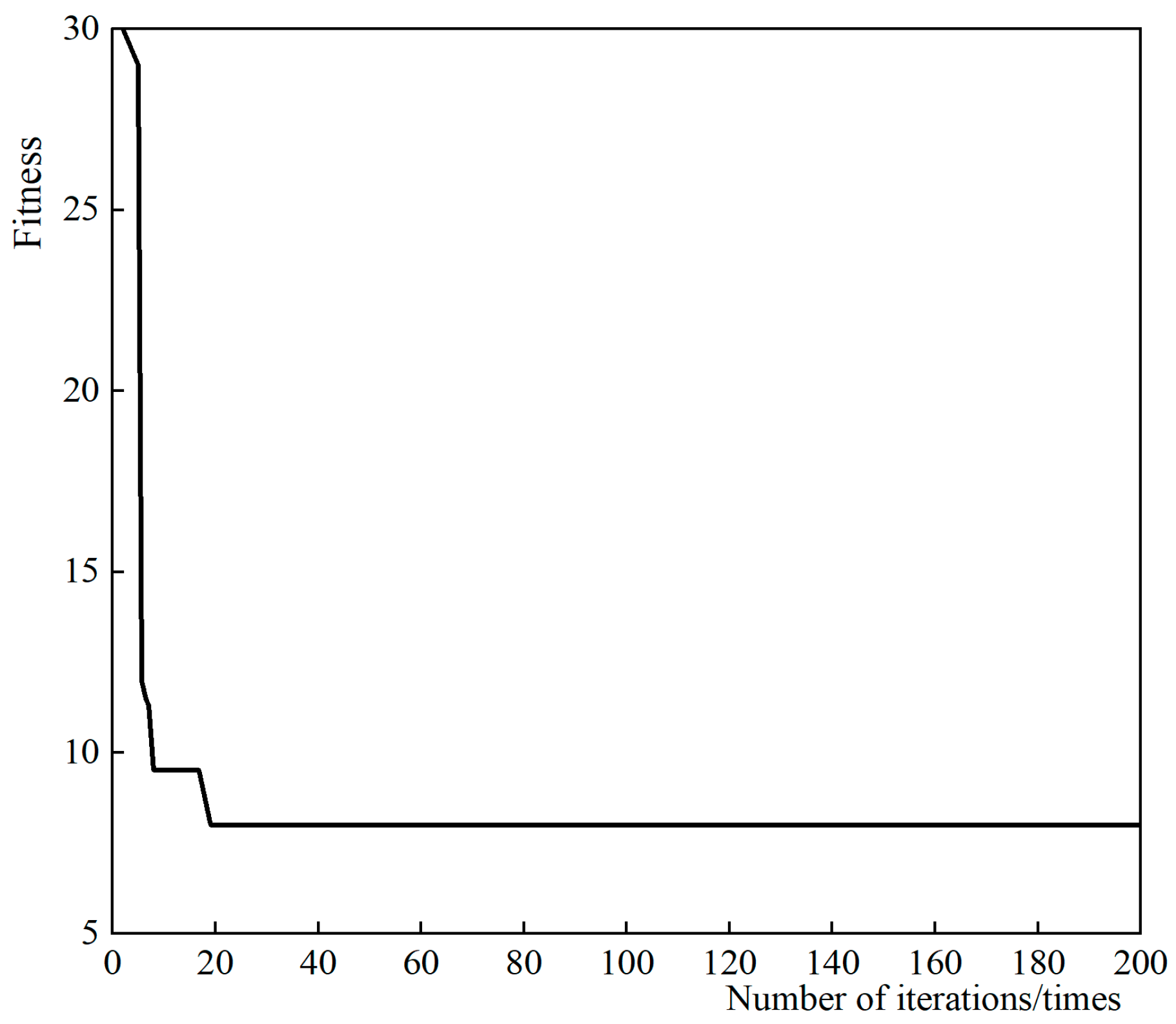
3.3.1. APSO Algorithm Principle
3.3.2. APSO-Optimized Fuzzy PID
4. Modeling and Simulation
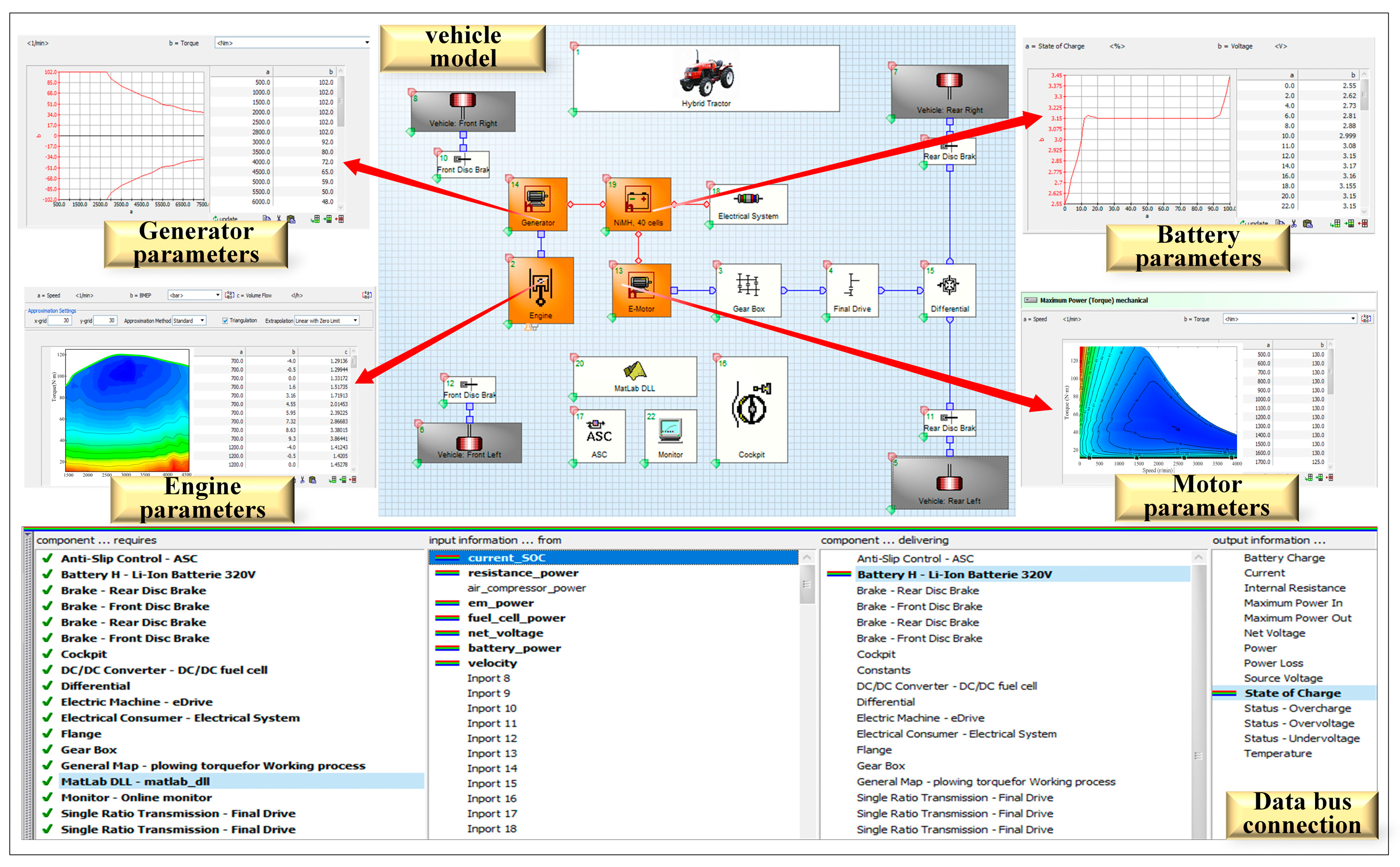
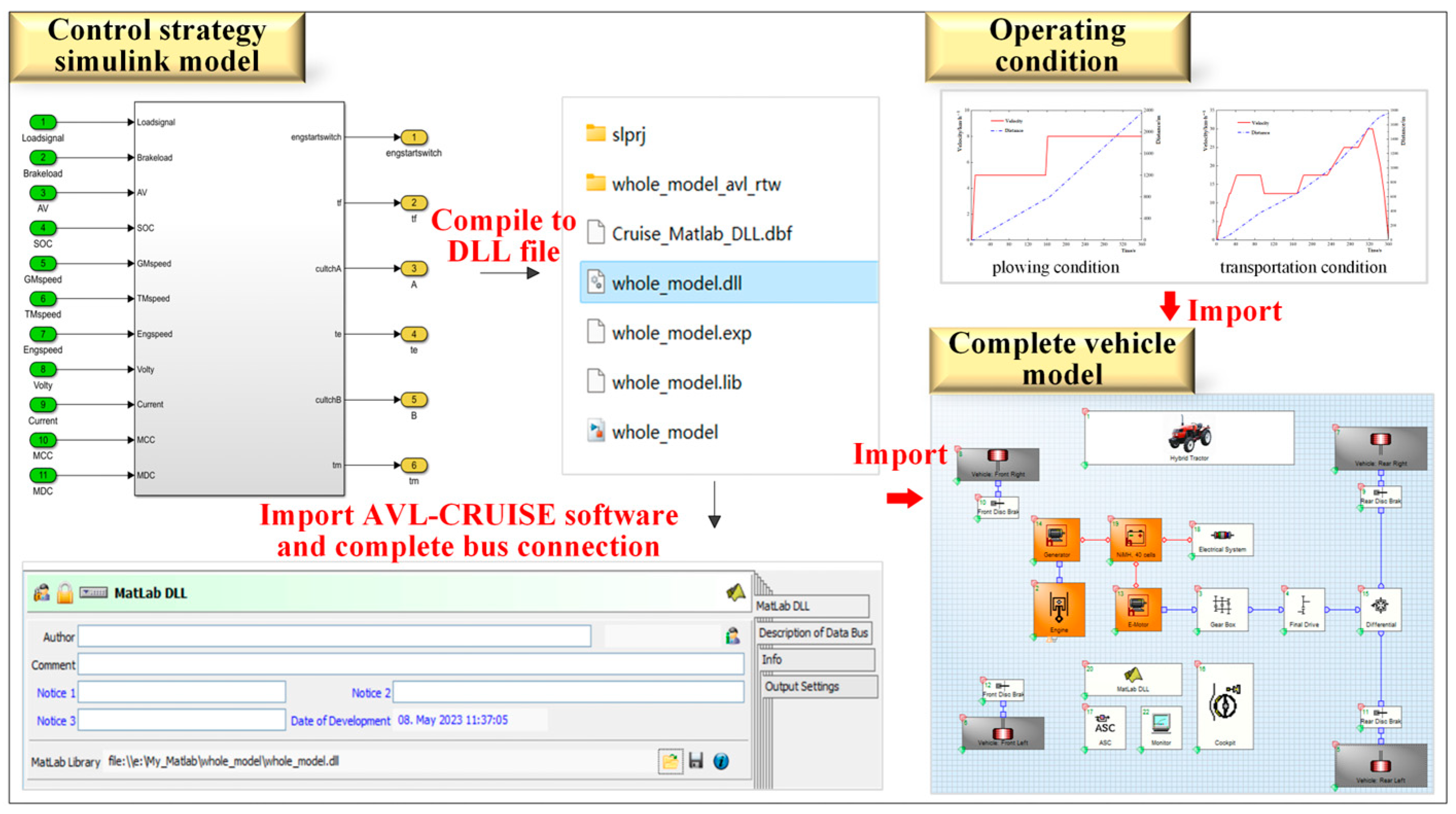
4.1. Simulation Model
4.2. Simulation Result Analysis
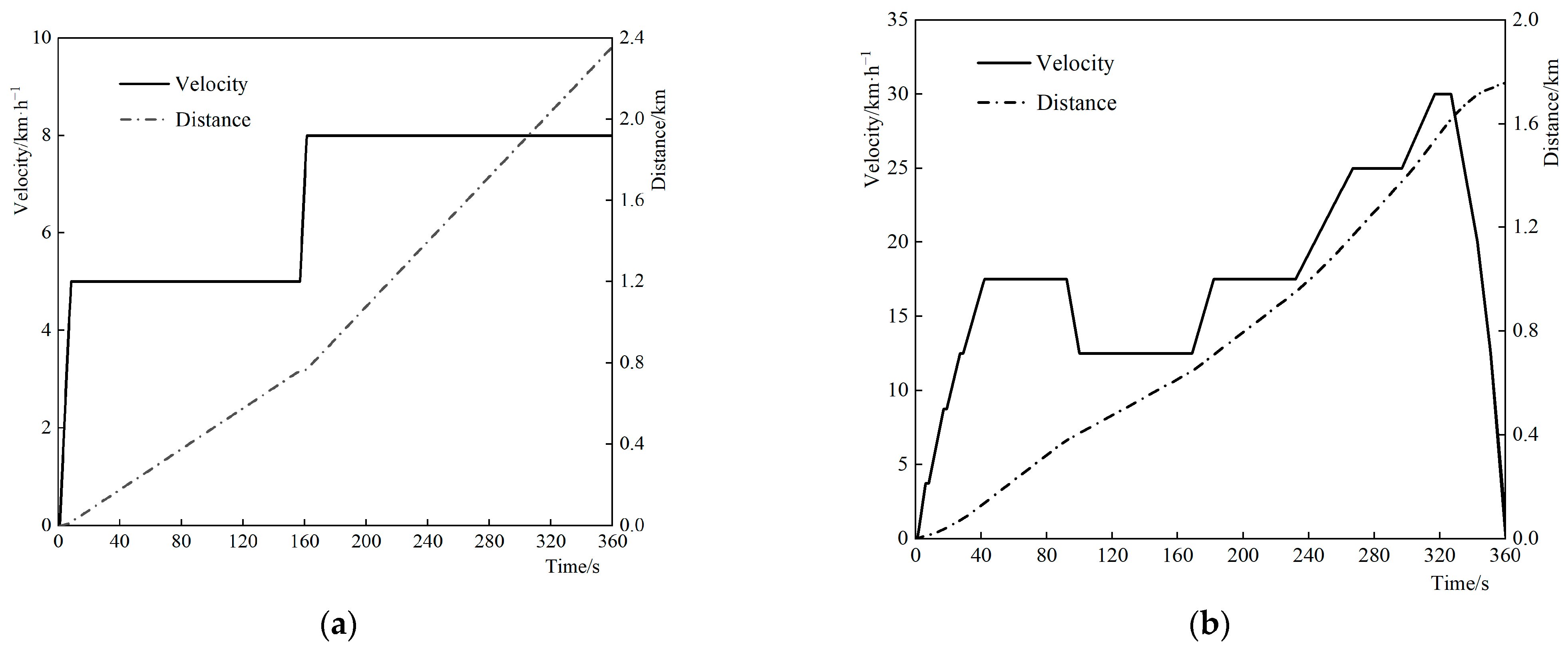
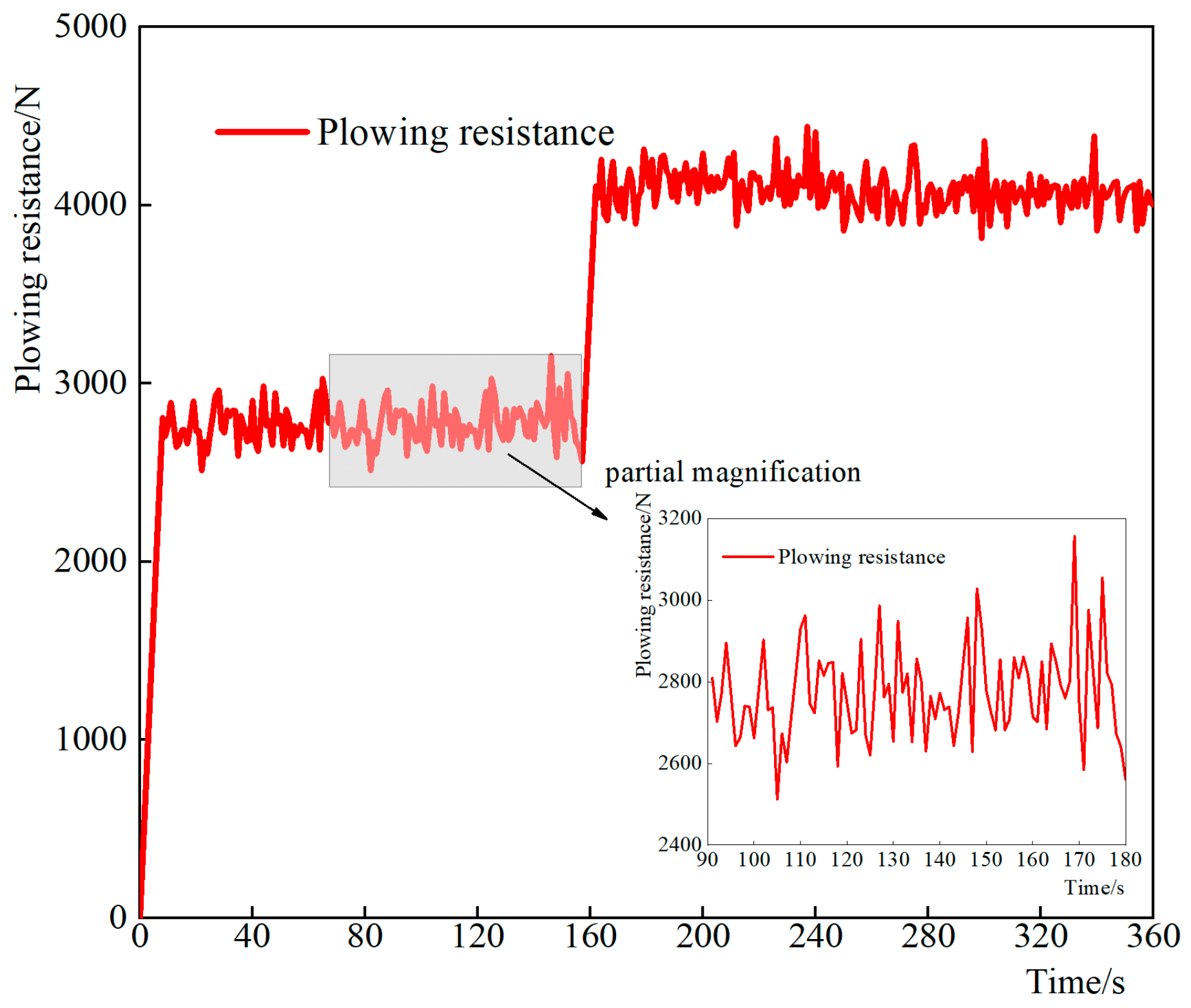
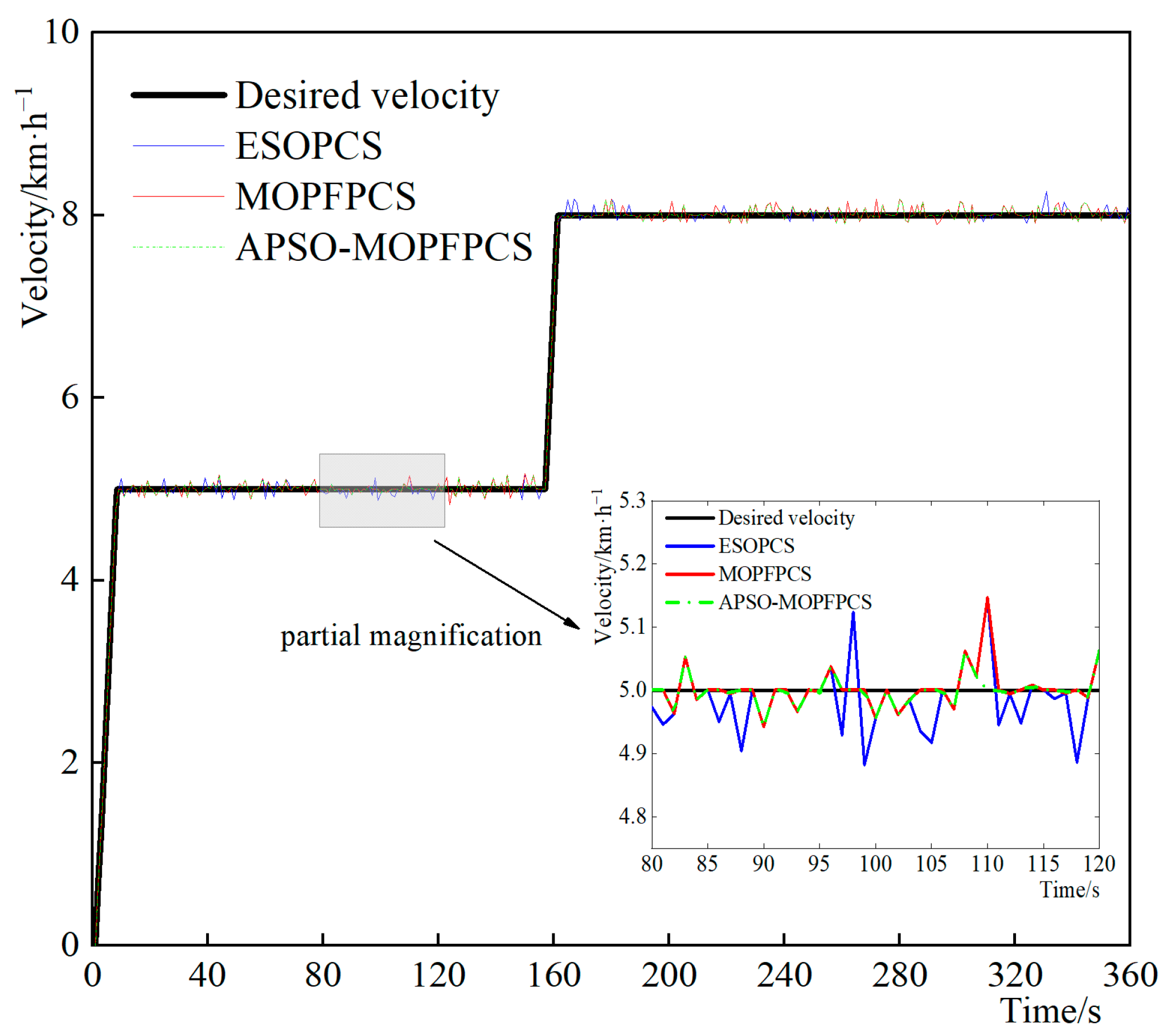
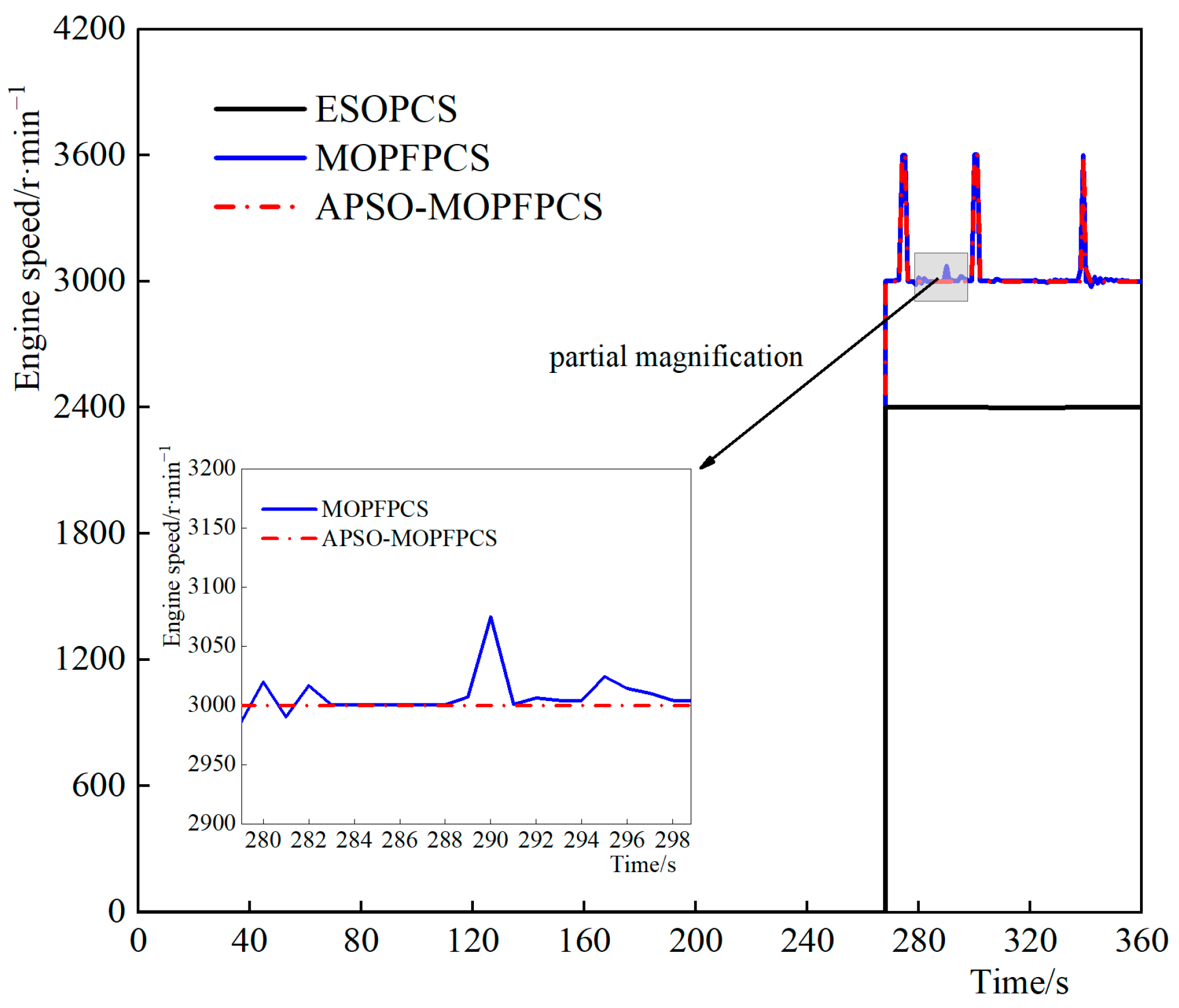
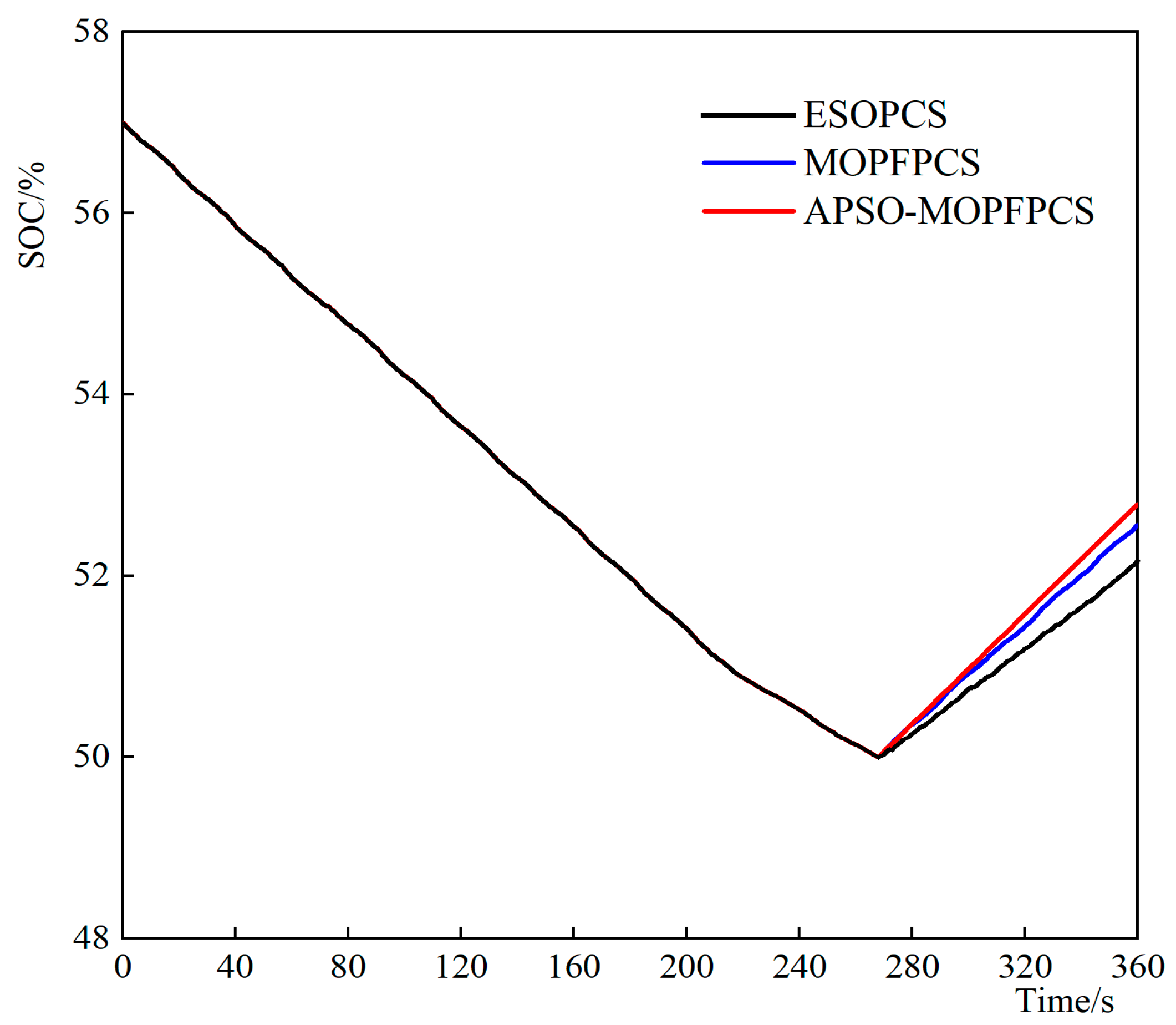
4.2.1. The Plowing Condition
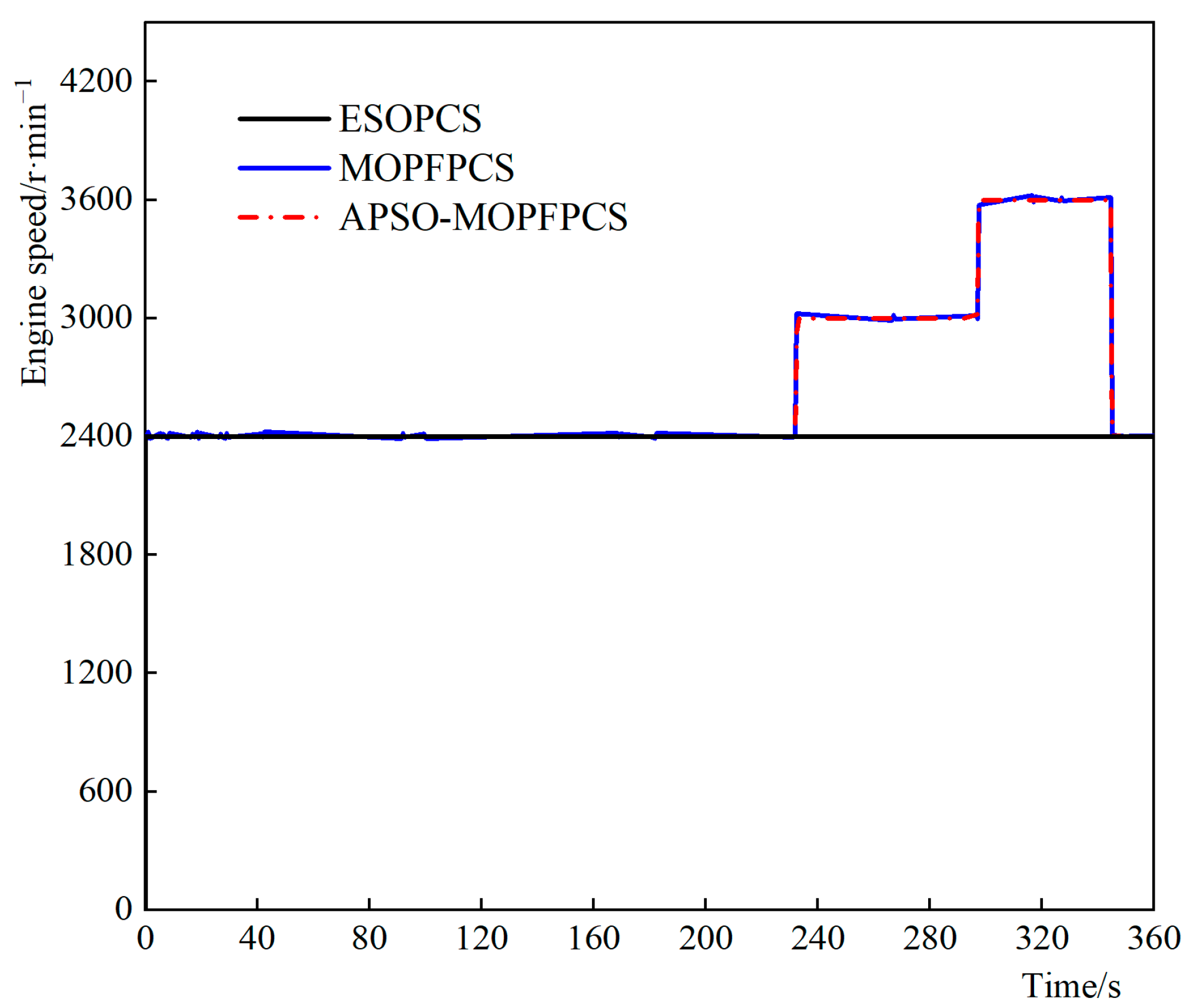
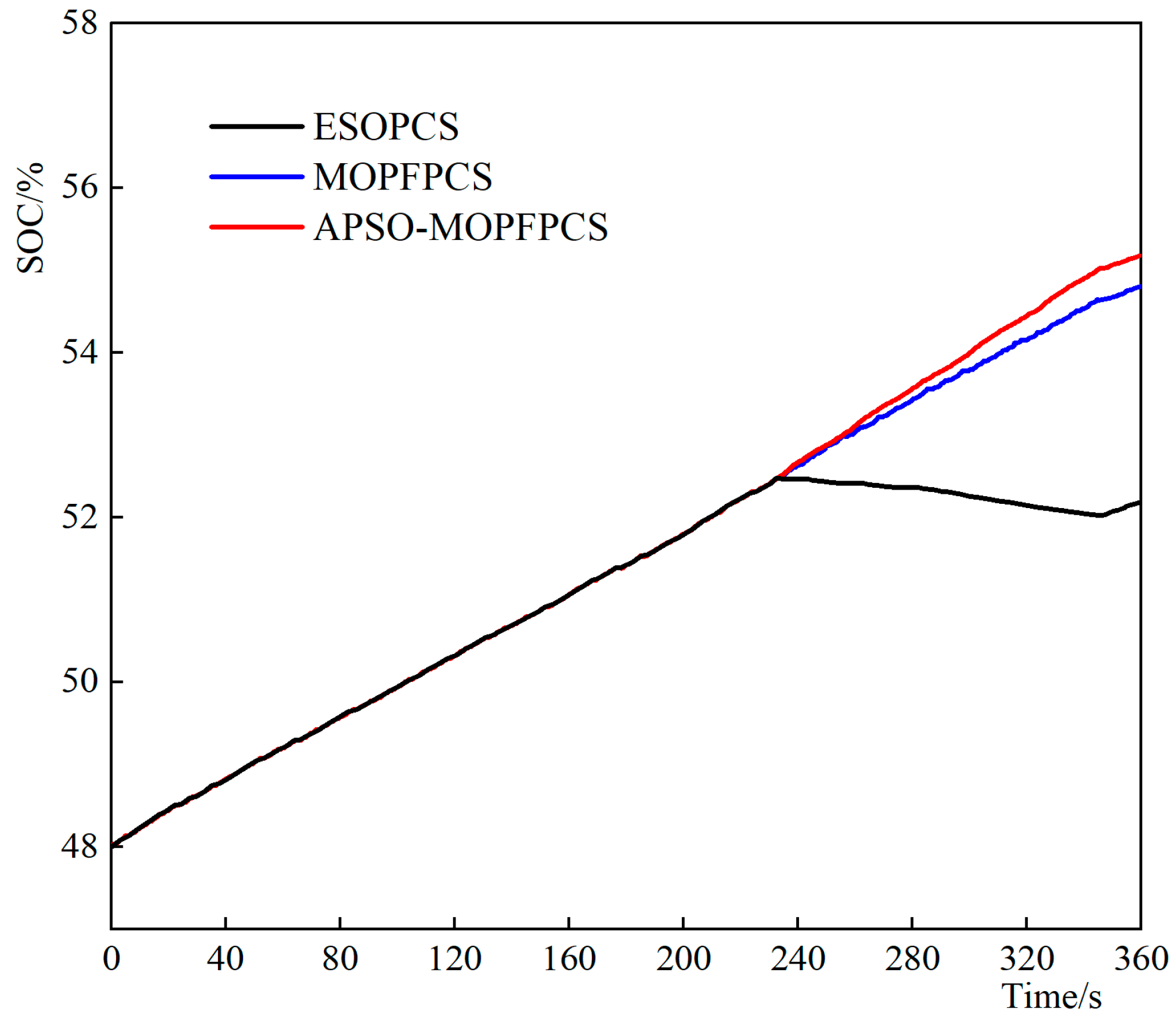
4.2.2. The Transportation Condition
5. Conclusions
- (1)
- This study focuses on the SDEHT as the research object. A vehicle simulation model is developed, and a method based on APSO-MOPFPCS is proposed. Additionally, this research designs ESOPCS and MOPFPCS for comparative analysis.
- (2)
- The results indicate that in the plowing mode, APSO-MOPFPCS achieves a reduction of 18.3% and 9.5% in equivalent fuel consumption compared to ESOPCS and MOPFPCS, respectively. Similarly, in the transportation mode, APSO-MOPFPCS demonstrates a reduction of approximately 15.0% and 4.6% in equivalent fuel consumption compared to the ESOPCS and MOPFPCS, respectively. These findings highlight the effectiveness of the proposed APSO-MOPFPCS.
- (3)
- The control strategy based on APSO-MOPFPCS can adjust the engine speed according to the actual power demand of the entire vehicle so that the engine can work in the high-efficiency zone, maintain power, and improve fuel economy at the same time.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, K.; Wu, H.; Zeng, Y. Development of smart agriculture with goals of carbon peaking and carbon neutrality. J. Huazhong Agric. Univ. 2019, 42, 10–17. [Google Scholar]
- Xie, B.; Wu, Z.; Mao, E. Current Status and Prospects of Key Technologies for Agricultural Tractors. J. Agric. Mach. 2018, 49, 13–30. [Google Scholar]
- Ju, X. Application of Big Data Technology to Promote Agricultural Structure Adjustment and High-Quality Development of Modern Agriculture. Comput. Intell. Neurosci. 2022, 9, 5222760. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y. Research and Reflection on Hybrid Power for Tractors. Agric. Eng. Technol. 2021, 41, 56–57. [Google Scholar]
- Li, Y.; Liu, M.; Xu, L.; Lei, S. Control Strategy of Hybrid Power Tractors based on Nonlinear Programming Genetic Algorithm. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 166–172+185. [Google Scholar]
- Lu, X.; Wu, Y.; Lian, J. Energy management of hybrid electric vehicles: A review of energy optimization of fuel cell hybrid power system based on genetic algorithm. Energy Convers. Manag. 2020, 205, 112474. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, G.; Liu, M.; Yan, X.; Xu, L.; Shang, C. Research on Global Optimal Energy Management Strategy of Agricultural Hybrid Tractor Equipped with CVT. World Electr. Veh. J. 2023, 14, 127. [Google Scholar] [CrossRef]
- Wang, Y.; Li, W.; Liu, Z.; Li, L. An Energy Management Strategy for Hybrid Energy Storage System Based on Reinforcement Learning. World Electr. Veh. J. 2023, 14, 57. [Google Scholar] [CrossRef]
- Li, W.; Feng, G.; Jia, S. An Energy Management Strategy and Parameter Optimization of Fuel Cell Electric Vehicles. World Electr. Veh. J. 2022, 13, 21. [Google Scholar] [CrossRef]
- Lü, X.; Li, S.; He, X.; Xie, C.; He, S.; Xu, Y.; Fang, J.; Zhang, M.; Yang, X. Hybrid Electric Vehicles: A Review of Energy Management Strategies Based on Model Predictive Control. J. Energy Storage 2022, 56, 106112. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, L.; Coskun, S.; Pang, H.; Cui, Y.; Xi, J. Energy management strategies for hybrid electric vehicles: Review, classification, comparison, and outlook. Energies 2020, 13, 3352. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Zhou, J. Study on Control Strategy of Tandem Hybrid Tractor Considering Battery Life Decay. J. Yunnan Agric. Univ. (Nat. Sci.) 2023, 38, 529–536. [Google Scholar]
- Xu, L.; Zhang, J.; Liu, M.; Zhao, Z.; Li, C. Control Algorithm and Energy Management Strategy for Extended Range Electric Tractors. Int. J. Agric. Biol. Eng. 2017, 10, 35–44. [Google Scholar]
- Luo, G. Research on Energy Management Strategy of Series Diesel-Electric Hybrid Tractor. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, 2019. [Google Scholar]
- Zhang, J.; Feng, G.; Xu, L.; Wang, W.; Yan, X.; Liu, M. Energy-saving Control of Hybrid Power Tractor Based on Pontryagin’s Minimum Principle. Trans. Chin. Soc. Agric. Mach. 2023, 54, 396–406. [Google Scholar]
- Dou, H.; Zhang, Y.; Ai, Q.; Zhao, X. Control strategy for hybrid tractor plow conditions oriented to coupled-split dynamic configuration. Trans. Chin. Soc. Agric. Eng. 2022, 38, 41–49. [Google Scholar]
- Du, A.; Chen, Y.; Zhang, D.; Han, Y. Multi-Objective Energy Management Strategy Based on PSO Optimization for Power-Split Hybrid Electric Vehicles. Energies 2021, 14, 2438. [Google Scholar] [CrossRef]
- Shao, X.; Yang, Z.; Mowafy, S.; Zheng, B.; Song, Z.; Luo, Z.; Guo, W. Load Characteristics Analysis of Tractor Drivetrain under Field Plowing Operation Considering Tire-Soil Interaction. Soil Tillage Res. 2023, 227, 105620. [Google Scholar] [CrossRef]
- Xu, L.; Liu, M.; Zhou, Z. Design of Drive System for Series Hybrid Tractor. J. Agric. Eng. 2014, 9, 11–18. [Google Scholar]
- Liu, Y.; Deng, X.; Zhang, W.; Zhu, Y.; He, R. Design Theory and Method Research on Tandem Hybrid Tractor Drive System. Agric. Equip. Veh. Eng. 2018, 6, 49–54. [Google Scholar]
- Yang, Y.; Zhang, Q. Design of Particle Swarm Optimization-based Self-tuning Fuzzy-PID Controller. J. Mech. Manuf. Autom. 2018, 47, 201–204. [Google Scholar]
- Singh, R.; Vashishath, M.; Kumar, S. Ant Colony Optimization Technique for Edge Detection Using Fuzzy Triangular Membership Function. Int. J. Syst. Assur. Eng. Manag. 2019, 10, 91–96. [Google Scholar] [CrossRef]
- Li, S.; Zhou, J.; Xu, Y. Design of Precision Irrigation Control System based on PSO-Optimized Fuzzy-PID. Water-Sav. Irrig. 2019, 3, 90–93. [Google Scholar]
- Zou, S.; Zhao, W. Energy Optimization Strategy of Vehicle DCS System Based on APSO Algorithm. Energy 2020, 208, 118404. [Google Scholar] [CrossRef]
- Liu, M.; Li, Y.; Zhao, S.; Han, B.; Lei, S.; Xu, L. Multi-Objective Optimization and Test of a Tractor Drive Motor. World Electr. Veh. J. 2022, 13, 43. [Google Scholar] [CrossRef]
- Ataei, M.; Khajepour, A.; Jeon, S. Development of a novel general reconfigurable vehicle dynamics model. Mech. Mach. Theory 2021, 156, 104147. [Google Scholar] [CrossRef]
- Du, C.; Gan, W.; Zhang, P.; He, J. Modeling of Vehicle Control Strategy and Hardware-in-the-Loop Simulation for Hybrid Electric Vehicles. Automot. Technol. 2016, 12, 31–36. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Parameter | Value |
|---|---|---|
| Engine | Maximum power/kW | 60 |
| Rated speed/(r/min) | 2400 | |
| Maximum torque/(N·m) | 120 | |
| Generator | Rated power/kW | 30 |
| Rated speed/(r/min) | 1500 | |
| Motor | Rated power/kW | 25 |
| Rated speed/(r/min) | 2000 | |
| Rated frequency/Hz | 50 | |
| Storage battery | Rated voltage/V | 100 |
| Rated capacity/Ah | 100 | |
| Transmission | One-speed transmission ratio | 12 |
| Two-speed transmission ratio | 8.45 | |
| Three-speed transmission ratio | 5.65 | |
| Four-speed transmission ratio | 3.2 | |
| Main speed reducer | Transmission ratio | 3.5 |
| ΔKp/ΔKi/ΔKd | E | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| Ec | NB | PB/NB/PS | PB/NB/PS | PM/NB/ZO | PM/NM/ZO | PS/NM/ZO | PS/ZO/PB | ZO/ZO/ZO |
| NM | PB/NB/NS | PB/NB/NS | PM/NM/NS | PM/NM/NS | PS/NS/ZO | ZO/ZO/PS | ZO/ZO/PM | |
| NS | PM/NM/NB | PM/NM/NB | PM/NS/NM | PS/NS/NS | ZO/ZO/ZO | NS/PS/PS | NM/PS/PM | |
| ZO | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/PS/ZO | NM/PS/PS | NM/PM/PM | |
| PS | PS/NS/NB | PS/NS/NM | ZO/ZO/NS | NS/PS/NS | NS/PS/ZO | NM/PM/PS | NM/PM/PS | |
| PM | ZO/ZO/NM | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO | NM/PB/PS | NB/PB/PS | |
| PB | ZO/ZO/PS | NS/ZO/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO | NB/PB/PB | NB/PB/PB | |
| Optimization Object | Ke | Kec | Ku |
|---|---|---|---|
| Parameters before optimization | 0.671 | 0.124 | 0.426 |
| Parameters after optimization | 0.832 | 0.085 | 0.691 |
| Time/s | Plowing Velocity/(km/h) | Plowing Depth/cm |
|---|---|---|
| 8~157 | 5 | 12 |
| 162~360 | 8 | 20 |
| Control Strategy | Fuel Consumption/L | Battery Initial SOC/% | Battery Termination SOC/% | Equivalent Fuel Consumption/L |
|---|---|---|---|---|
| ESOPCS | 0.264 | 57 | 52.2 | 0.361 |
| MOPFPCS | 0.237 | 57 | 52.6 | 0.326 |
| APSO-MOPFPCS | 0.211 | 57 | 52.8 | 0.295 |
| Control Strategy | Fuel Consumption/L | Battery Initial SOC/% | Battery Termination SOC/% | Equivalent Fuel Consumption/L |
|---|---|---|---|---|
| ESOPCS | 0.942 | 48 | 52.2 | 0.858 |
| MOPFPCS | 0.898 | 48 | 54.8 | 0.764 |
| APSO-MOPFPCS | 0.873 | 48 | 55.2 | 0.729 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Wang, Y.; Li, Y.; Zhao, J.; Liu, M. Research on Control Strategy of APSO-Optimized Fuzzy PID for Series Hybrid Tractors. World Electr. Veh. J. 2023, 14, 258. https://doi.org/10.3390/wevj14090258
Xu L, Wang Y, Li Y, Zhao J, Liu M. Research on Control Strategy of APSO-Optimized Fuzzy PID for Series Hybrid Tractors. World Electric Vehicle Journal. 2023; 14(9):258. https://doi.org/10.3390/wevj14090258
Chicago/Turabian StyleXu, Liyou, Yiting Wang, Yanying Li, Jinghui Zhao, and Mengnan Liu. 2023. "Research on Control Strategy of APSO-Optimized Fuzzy PID for Series Hybrid Tractors" World Electric Vehicle Journal 14, no. 9: 258. https://doi.org/10.3390/wevj14090258
APA StyleXu, L., Wang, Y., Li, Y., Zhao, J., & Liu, M. (2023). Research on Control Strategy of APSO-Optimized Fuzzy PID for Series Hybrid Tractors. World Electric Vehicle Journal, 14(9), 258. https://doi.org/10.3390/wevj14090258