
Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems


Abstract
:1. Introduction
1.1. Current Research Status of EVs with Automated Manual Transmission
1.2. Current Research Status of Dual-Motor EVs
1.3. Summary of Article Structure
- ▪
- S1: Introduction
- ▪
- S2: Modeling and Optimization of Automated Manual Transmission and Dual-Motor EVs
- ▪
- S3: Simulation Results and Analysis of EV with Automated Manual Transmission
- ▪
- S4: Conclusions
2. Modeling and Optimization of Automated Manual Transmission and Dual-Motor EVs
2.1. Modeling and Optimization of EV with AMT
2.1.1. Modeling of EV with Automated Manual Transmission
- (1)
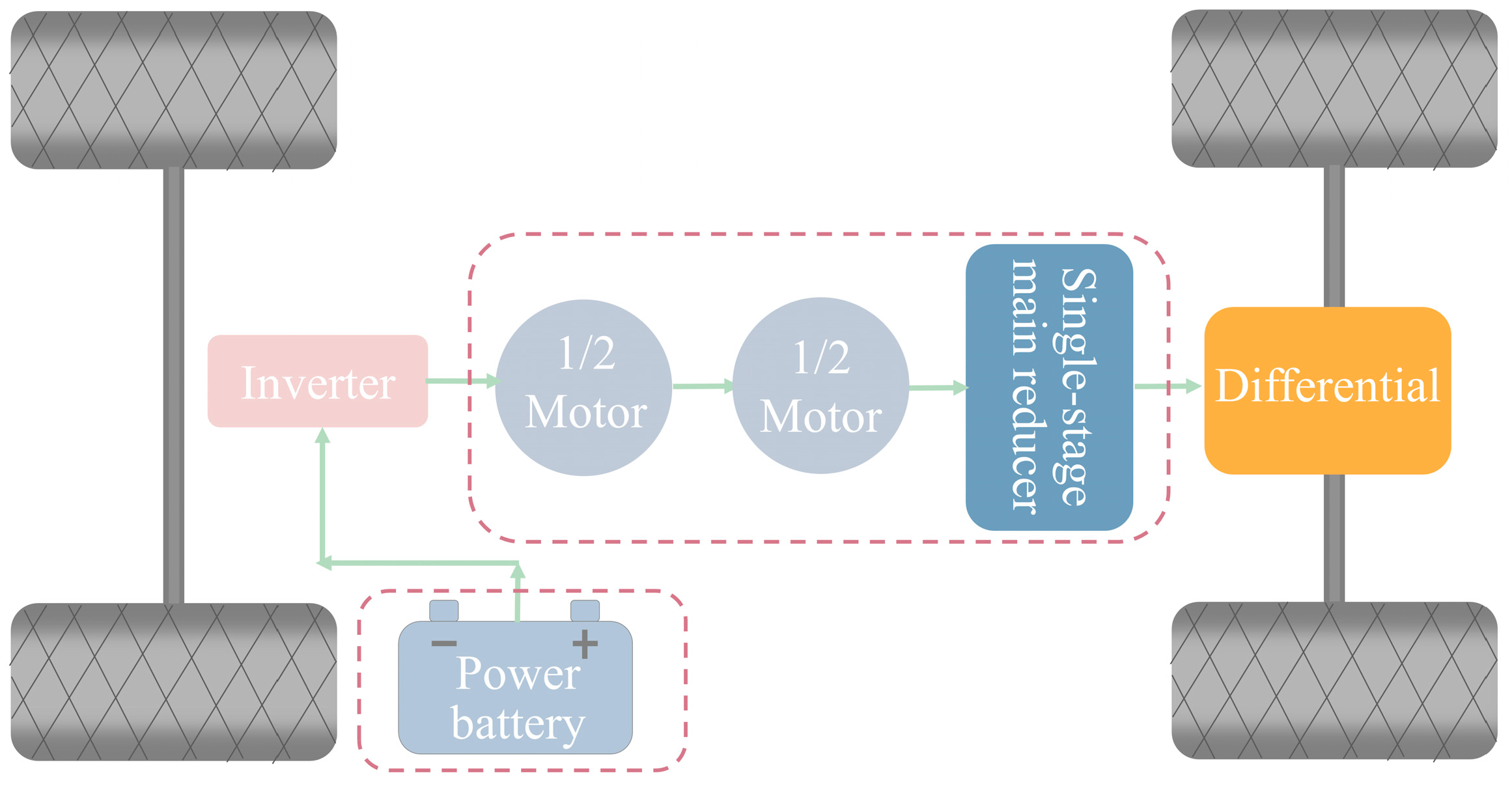
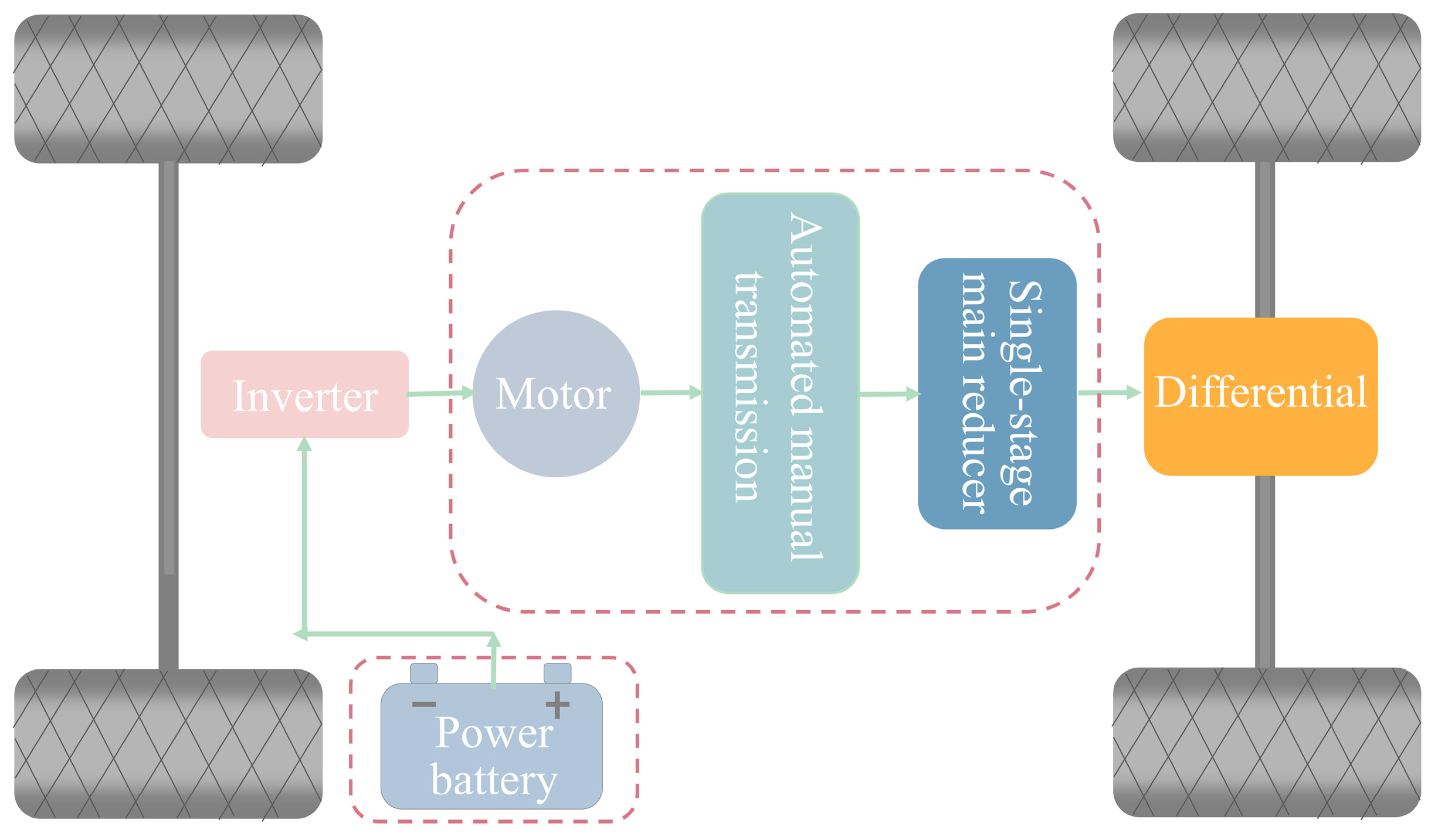
- Single-Stage Main Reducer Model Establishment
- (a)
- Single-stage main reducer EV powertrain architecture.
- (b)
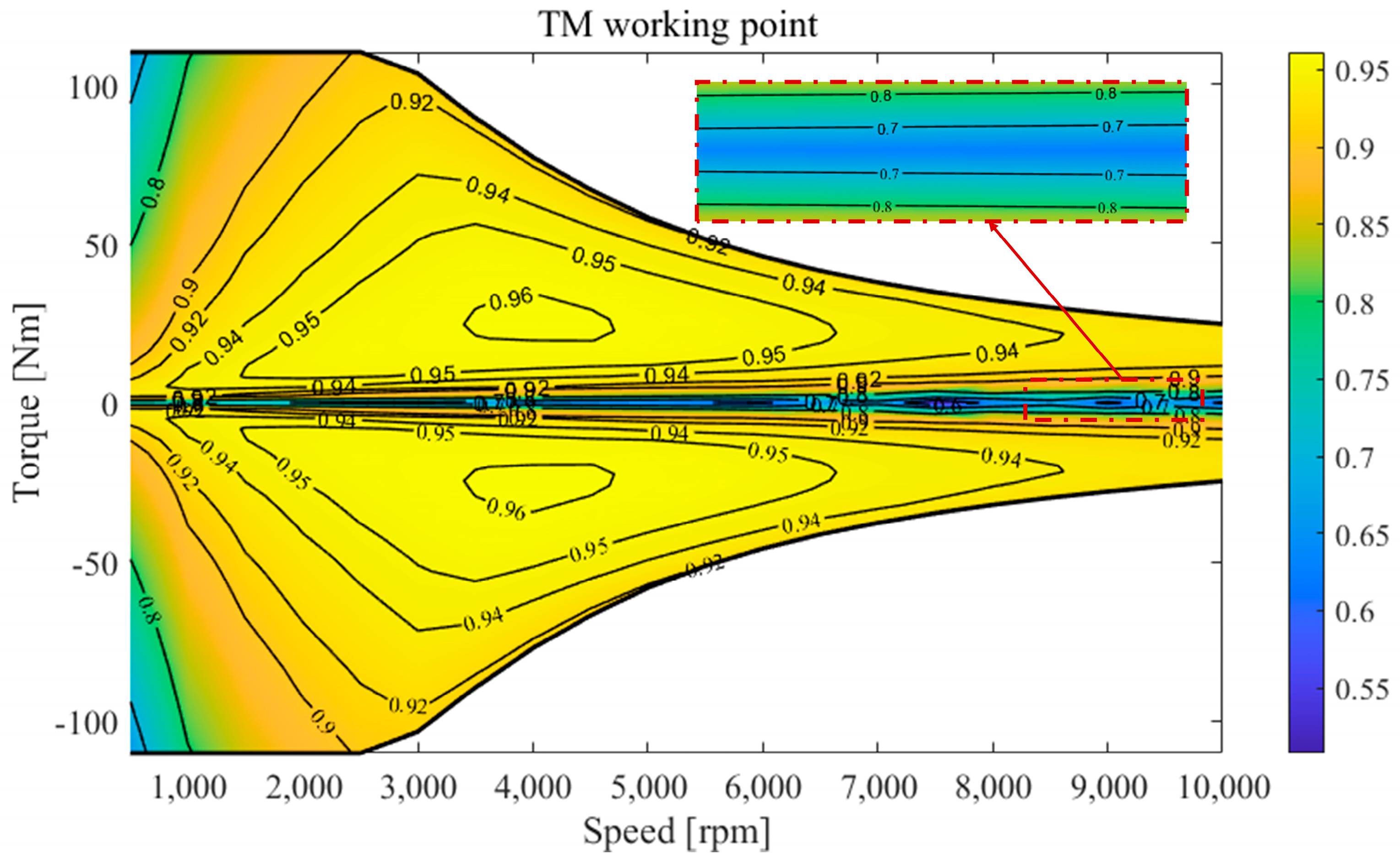
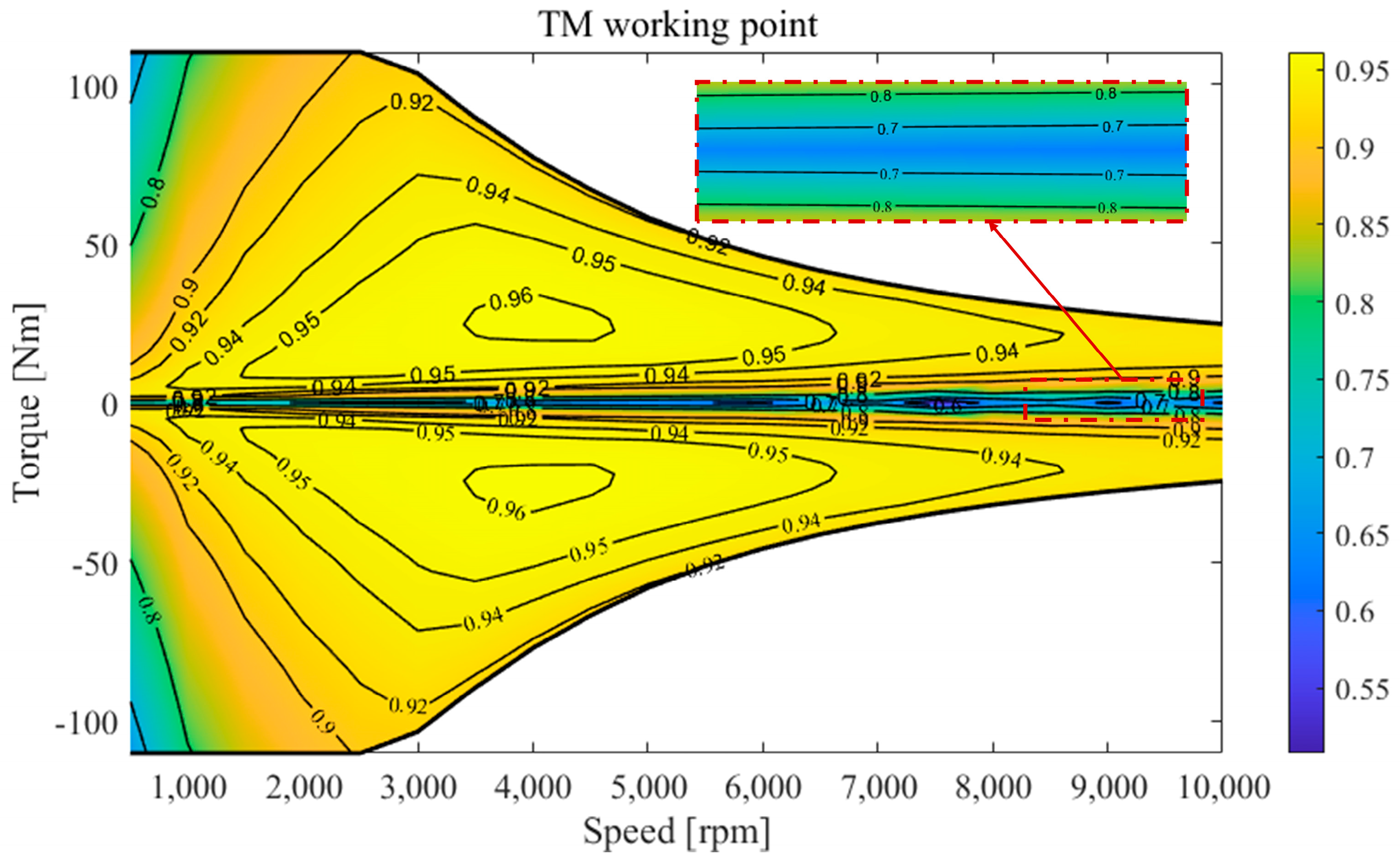
- Motor Modeling
- (c)
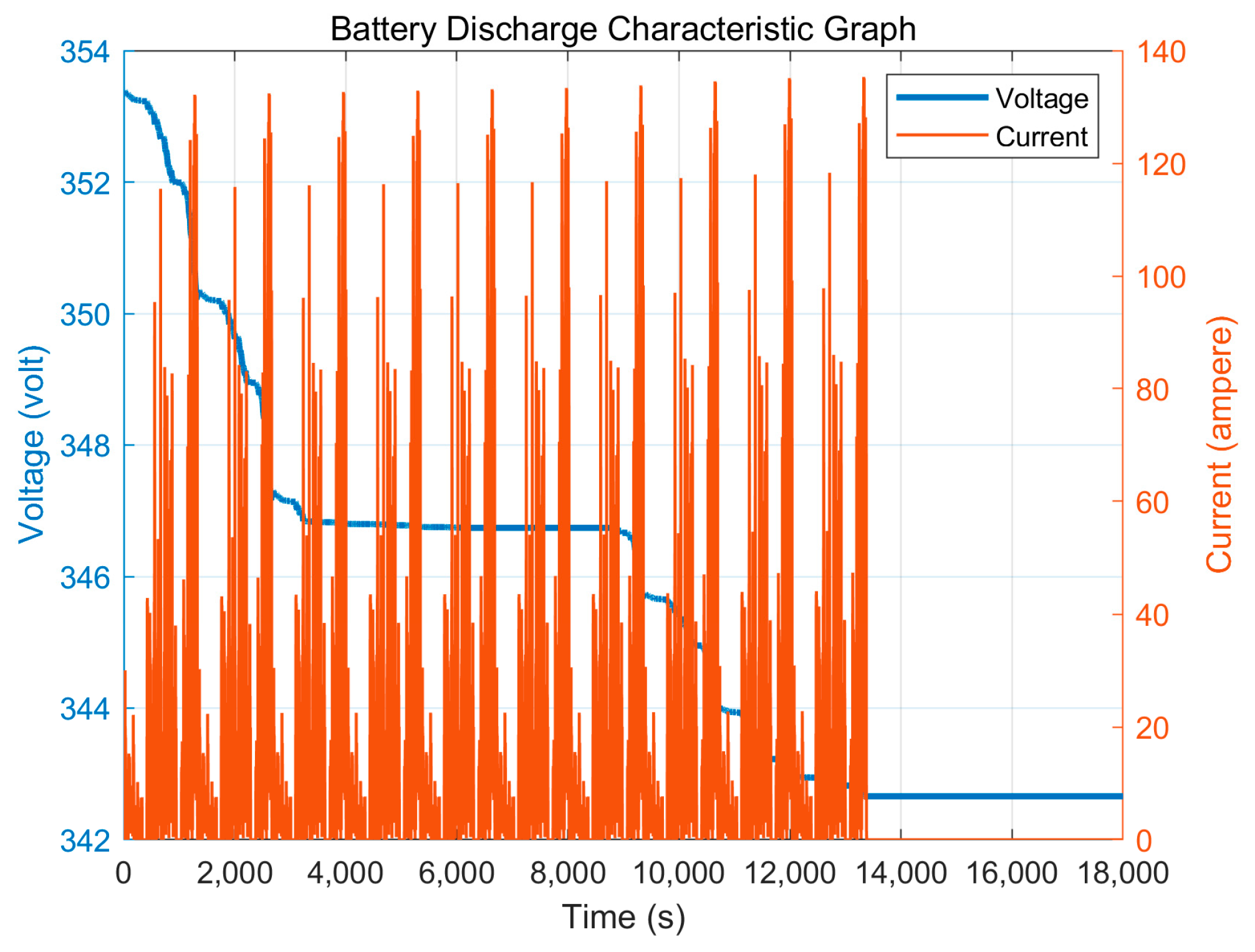
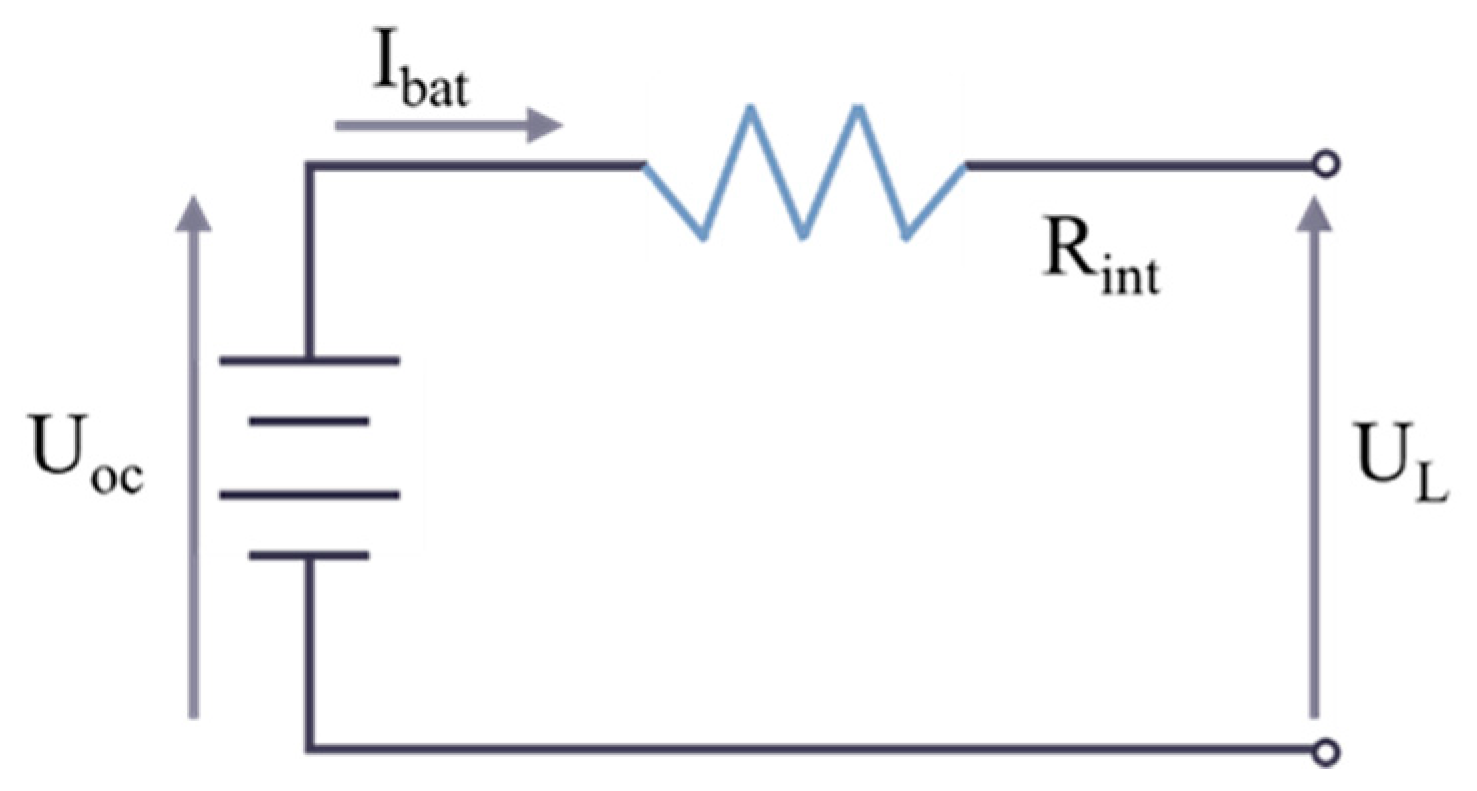
- Battery Modeling
- (2)
- Model Validation
- (3)
- EV with Automated Manual Transmission Establishment
2.1.2. EV with Automated Manual Transmission Gear Ratio Optimization
- (1)
- Multi-parameter Optimization Method
- Initialization of Population: Randomly generate a set of individuals, with each individual representing a potential solution. This set of individuals forms the initial population.
- Fitness Evaluation: Compute each individual’s fitness based on a specific evaluation function for the problem. The fitness value measures the quality of the individual’s solution to the problem.
- Selection Operation: Based on the fitness values, select some of the fittest individuals as parents. The selection operation is typically performed using a probabilistic selection method, where more fit individuals are more likely to be selected.
- Crossover operation selects genes from the chromosomes of selected parent individuals and exchanges them to create new offspring.
- Mutation operation randomly alters genes within the chromosomes.
- Update Population: replace the parent individuals with the newly generated offspring to obtain an updated population.
- Repeat the b–f operations until the optimal solution is obtained.
- (2)
- Genetic Algorithm Parameter Settings
2.2. Dual-Motor Electric Vehicle Modeling
2.2.1. The Method for Obtaining the Dual-Motor Motor Efficiency Map (MAP)
2.2.2. Three Different Torque Allocation Schemes for the Dual-Motor EV
- (1)
- Scheme 1: Equal Torque Distribution between Dual Motors
- (2)
- Scheme 2: Single-Motor Priority
- (3)
- Scheme 3: Dual-Motor Efficiency Optimization
3. Simulation Results and Analysis of EV with Automated Manual Transmission
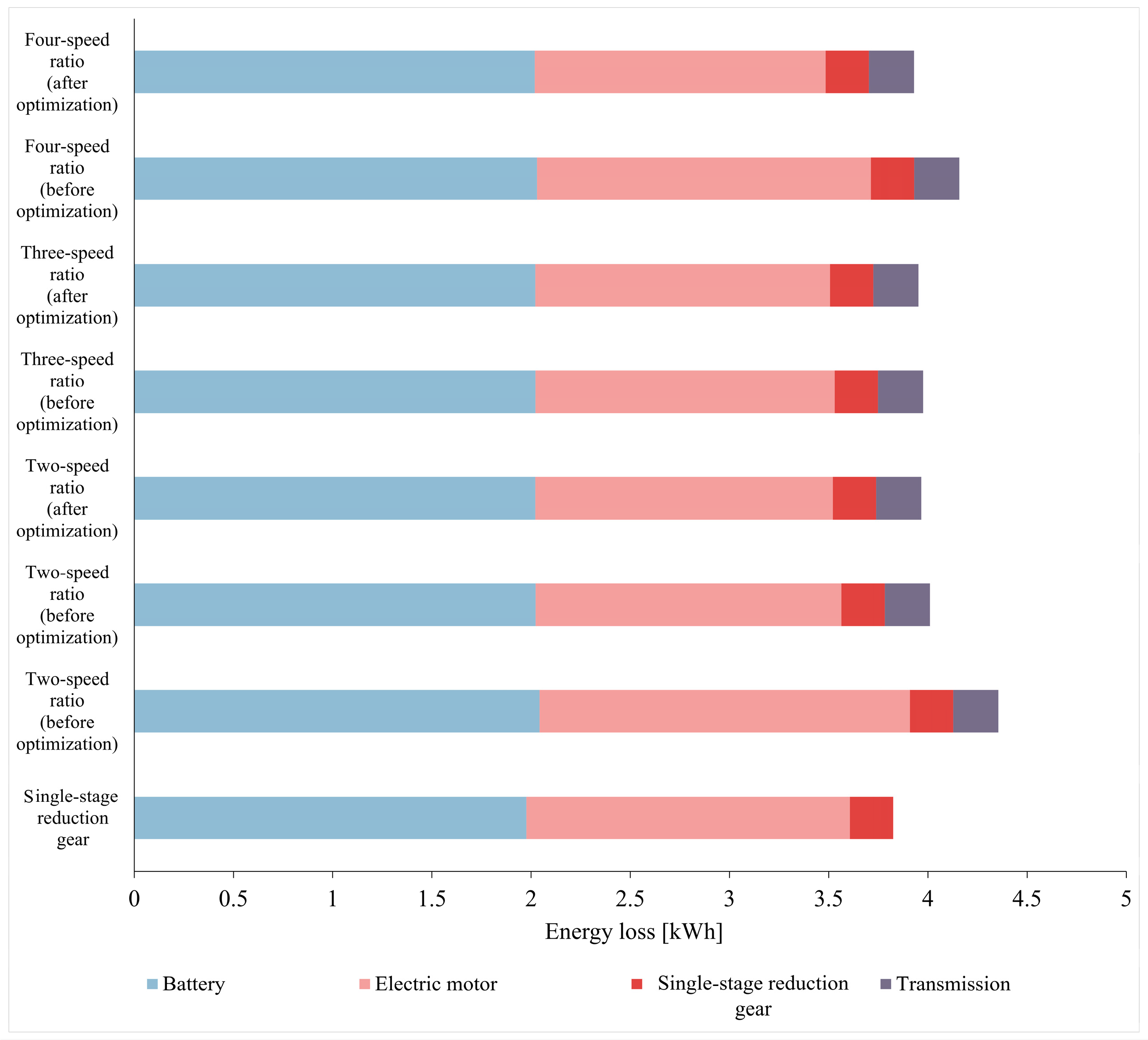
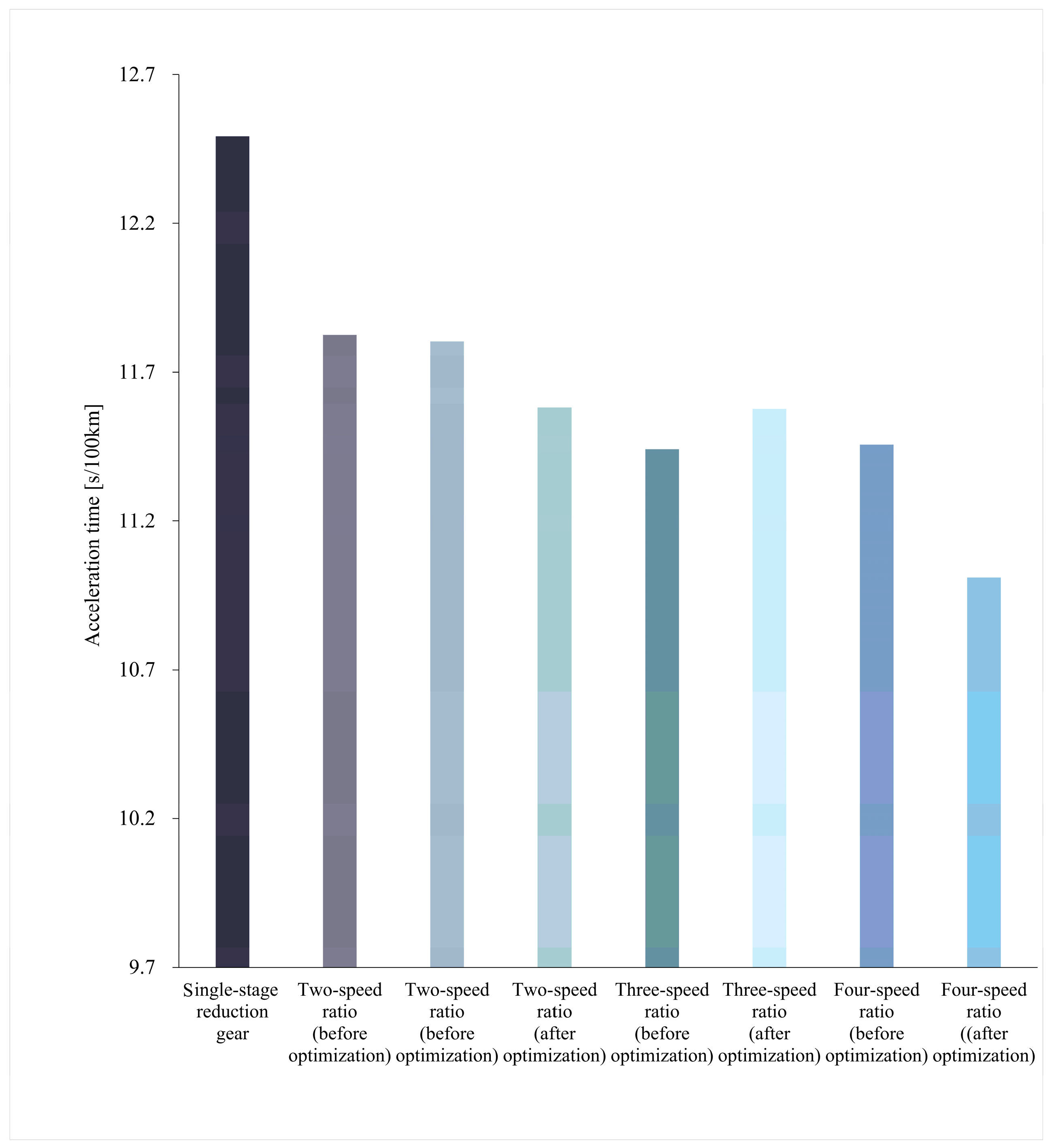
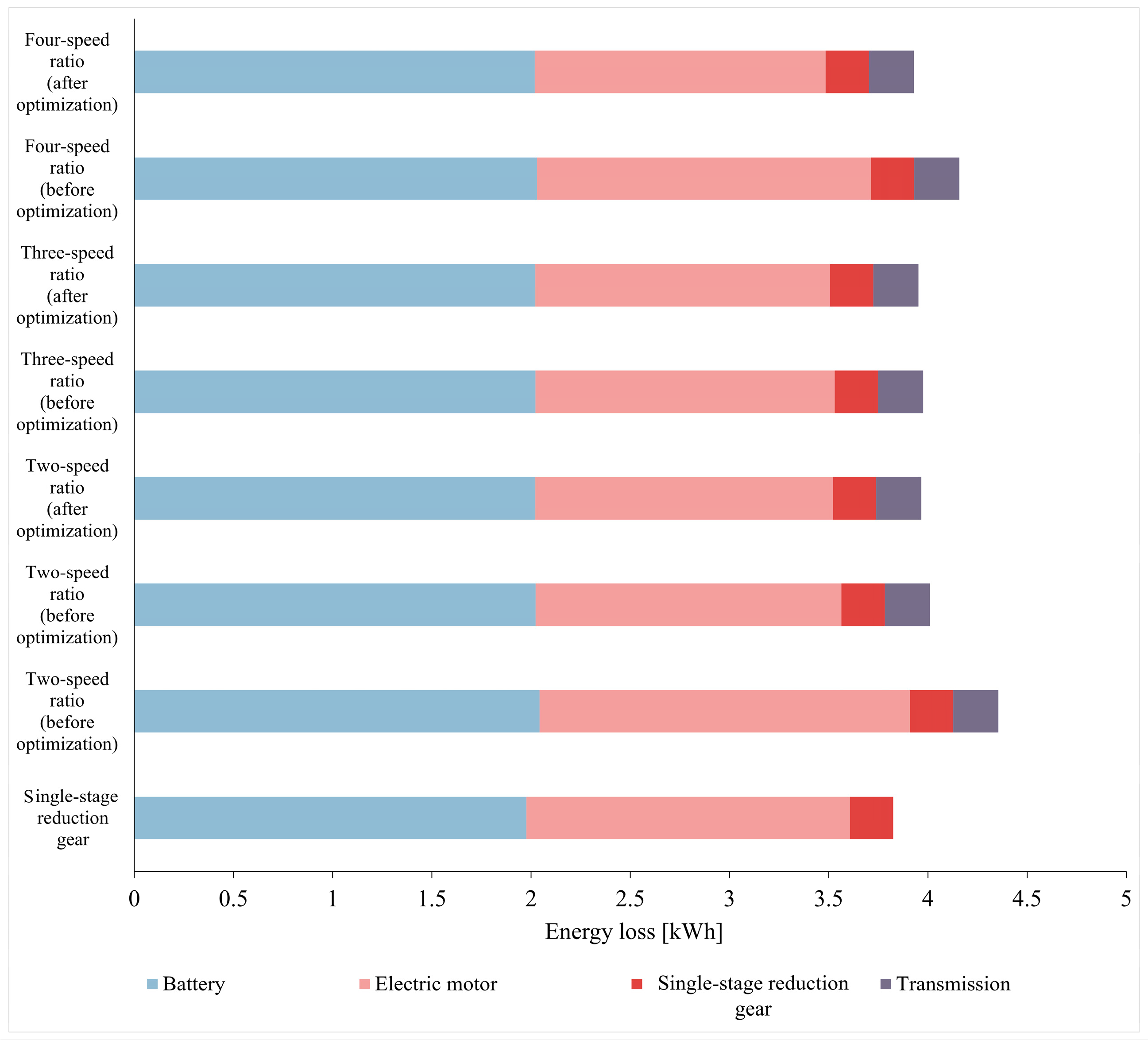
3.1. AMT EV Simulation Results and Analysis
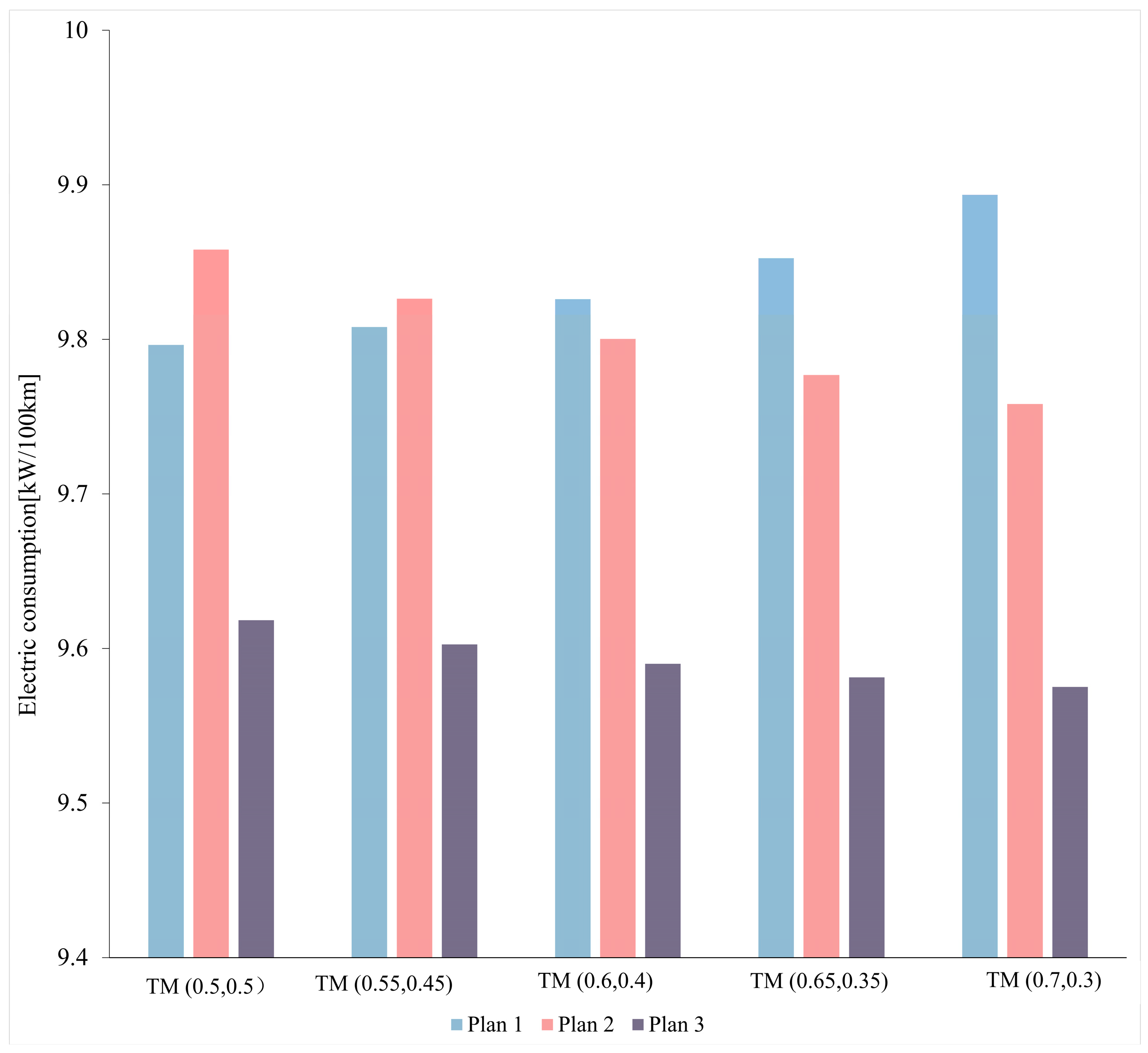
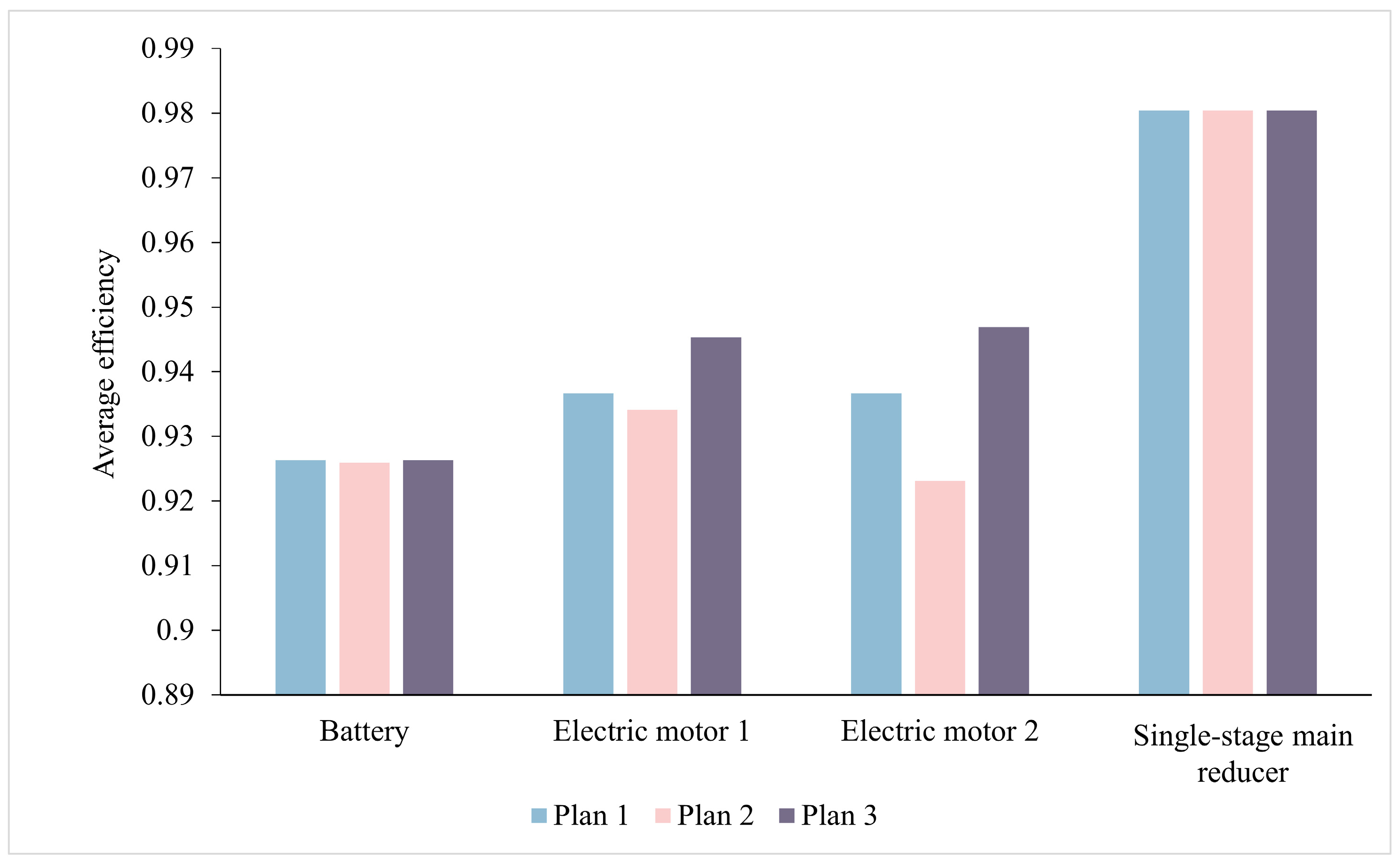
3.2. Double-Motor EV Simulation Results and Analysis
4. Conclusions
- Interdisciplinary Research: engaging in interdisciplinary collaboration across automotive engineering, motor control, and energy management teams to explore more efficient and intelligent EV power system designs.
- Intelligent Management Systems: developing EV energy management systems that integrate advanced control algorithms, enabling dynamic energy distribution based on real-time road conditions, driving habits, and energy consumption patterns.
- Environmental and Economic Win–Win: delving into the potential of electric vehicles to reduce environmental pollution and enhance energy use efficiency, contributing to the realization of sustainable transportation solutions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, J.; Zhu, S.; Wang, W.; Li, Y.; Li, N. Coupling coordination between new urbanisation and carbon emissions in China. Sci. Total Environ. 2022, 850, 158076. [Google Scholar] [CrossRef]
- Han, Y.; Duan, H.; Du, X.; Jiang, L. Chinese househ6old environmental footprint and its response to environmental awareness. Sci. Total Environ. 2021, 782, 146725. [Google Scholar] [CrossRef]
- Tamor, M.A.; Stechel, E.B. Electrification of transportation means a lot more than a lot more electric vehicles. iScience 2022, 25, 104376. [Google Scholar] [CrossRef]
- Hao, X.; Saafi, M.A.; Ou, S.; He, X.; Jiang, Y.; Lin, Z.; Yu, R.; Gan, Y.; Lu, Z. Assessing the cost-effectiveness of carbon neutrality for light-duty vehicle sector in China. iScience 2023, 26, 108203. [Google Scholar] [CrossRef] [PubMed]
- Alcázar-García, D.; Martínez, J.L.R. Model-based design validation and optimization of drive systems in electric, hybrid, plug-in hybrid and fuel cell vehicles. Energy 2022, 254, 123719. [Google Scholar] [CrossRef]
- Caban, J.; Małek, A.; Šarkan, B. Strategic Model for Charging a Fleet of Electric Vehicles with Energy from Renewable Energy Sources. Energies 2024, 17, 1264. [Google Scholar] [CrossRef]
- Piotrowska, K.; Piasecka, I.; Kłos, Z.; Marczuk, A.; Kasner, R. Assessment of the life cycle of a wind and photovoltaic power plant in the context of sustainable development of energy systems. Materials 2022, 15, 7778. [Google Scholar] [CrossRef]
- Dahbi, M.; Doubabi, S.; Rachid, A.; Oulad-Abbou, D. Performance evaluation of electric vehicle brushless direct current motor with a novel high-performance control strategy with experimental implementation. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 358–369. [Google Scholar] [CrossRef]
- Fang, Y.; Ruan, J.; Walker, P.; Zhang, N. Comparison of effect on motor among 2-, 3-and 4-speed transmission in electric vehicle. In Proceedings of the 2017 IEEE International Conference on Mechatronics (ICM), Churchill, VIC, Australia, 13–15 February 2017. [Google Scholar]
- Kumar, V.; Chenchireddy, K.; Sreejyothi, K.R.; Sujatha, G. Design and Development of Brushless DC Motor Drive for Electrical Vehicle Application. In AI Enabled IoT for Electrification and Connected Transportation; Springer: Berlin/Heidelberg, Germany, 2022; pp. 201–217. [Google Scholar]
- Ganesan, A.; Murgovski, N.; Yang, D.; Gros, S. Real-Time Mixed-Integer Energy Management Strategy for Multi-Motor Electric Vehicles. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023. [Google Scholar]
- Montazeri-Gh, M.; Pourbafarani, Z.; Mahmoodi-k, M. Comparative study of different types of PHEV optimal control strategies in real-world conditions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 232, 1597–1610. [Google Scholar] [CrossRef]
- Ruan, J.; Walker, P.; Zhang, N. Comparison of power consumption efficiency of CVT and multi-speed transmissions for electric vehicle. Int. J. Automot. Eng. 2018, 9, 268–275. [Google Scholar] [CrossRef]
- Lin, X.; Li, Y.; Xia, B. An online driver behavior adaptive shift strategy for two-speed AMT electric vehicle based on dynamic corrected factor. Sustain. Energy Technol. Assess. 2021, 48, 101598. [Google Scholar] [CrossRef]
- He, B.; Chen, Y.; Wei, Q.; Wang, C.; Wei, C.; Li, X. Performance Comparison of Pure Electric Vehicles with Two-Speed Transmission and Adaptive Gear Shifting Strategy Design. Energies 2023, 16, 3007. [Google Scholar] [CrossRef]
- Shen, P.; Zhao, Z.; Guo, Q.; Zhou, P. Development Of economic velocity planning algorithm for plug-in hybrid electric vehicle. IEEE Trans. Intell. Transp. Syst. 2021, 23, 5501–5513. [Google Scholar] [CrossRef]
- Borthakur, S.; Subramanian, S.C. Design and optimization of a modified series hybrid electric vehicle powertrain. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1419–1435. [Google Scholar] [CrossRef]
- Ganesan, A.; Gros, S.; Murgovski, N. Numerical Strategies for Mixed-Integer Optimization of Power-Split and Gear Selection in Hybrid Electric Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 24, 3194–3210. [Google Scholar] [CrossRef]
- Fu, J.; Song, S.; Fu, Z.; Ma, J. Design of coordinated control strategy during driving mode switching for parallel hybrid electric vehicles. Trans. Inst. Meas. Control 2019, 41, 2507–2520. [Google Scholar] [CrossRef]
- Li, Y.; Zhu, B.; Zhang, N.; Peng, H.; Chen, Y. Parameters optimization of two-speed powertrain of electric vehicle based on genetic algorithm. Adv. Mech. Eng. 2020, 12, 1687814020901652. [Google Scholar] [CrossRef]
- Korayem, A.H.; Khajepour, A.; Fidan, B. A review on vehicle-trailer state and parameter estimation. IEEE Trans. Intell. Transp. Syst. 2021, 23, 5993–6010. [Google Scholar] [CrossRef]
- Panyam, A.R.; Panguluru, C. Design Parameter Optimization of Electric Drive Units. A Regression Based Optimization of PMSM Geometrical Design Parameters and Final Drive Ratio. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2023. [Google Scholar]
- Yu, X.; Lin, C.; Zhao, M.; Yi, J.; Su, Y.; Liu, H. Optimal energy management strategy of a novel hybrid dual-motor transmission system for electric vehicles. Appl. Energy 2022, 321, 119395. [Google Scholar] [CrossRef]
- Tian, Y.; Yi, G.; Ji, X.; Wen, G.; Zhang, Y.; Liu, J.; Zhang, N. Design, Analysis and Mode Shifting of a Novel Dual-Motor Powertrain for electric vehicles. IEEE Trans. Transp. Electrif. 2023. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Rizzoni, G. A review of architectures and control strategies of dual-motor coupling powertrain systems for battery electric vehicles. Renew. Sustain. Energy Rev. 2022, 162, 112455. [Google Scholar] [CrossRef]
- Zhu, L.; Tao, F.; Fu, Z.; Wang, N.; Ji, B.; Dong, Y. Optimization based adaptive cruise control and energy management strategy for connected and automated FCHEV. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21620–21629. [Google Scholar] [CrossRef]
- Hu, J.; Zheng, L.; Jia, M.; Zhang, Y.; Pang, T. Optimization and model validation of operation control strategies for a novel dual-motor coupling-propulsion pure electric vehicle. Energies 2018, 11, 754. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Walker, P.D.; Zhang, N. Optimization and coordinated control of gear shift and mode transition for a dual-motor electric vehicle. Mech. Syst. Signal Process. 2021, 158, 107731. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, H.; Liao, Y.; Gao, J. Study on global parameters optimization of dual-drive powertrain system of pure electric vehicle based on multiple condition computer simulation. Complexity 2020, 2020, 6057870. [Google Scholar] [CrossRef]
- Hu, J.; Zu, G.; Jia, M.; Niu, X. Parameter matching and optimal energy management for a novel dual-motor multi-modes powertrain system. Mech. Syst. Signal Process. 2019, 116, 113–128. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, N.; Zhou, S.; Walker, P.D. Model and gear shifting control of a novel two-speed transmission for battery electric vehicles. Mech. Mach. Theory 2020, 152, 103902. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, K.; Li, S.; Yang, F.; Cheng, S.; Eldeeb, H.H.; Kang, J.; Xu, G. Shielding optimization of IPT system based on genetic algorithm for efficiency promotion in EV wireless charging applications. IEEE Trans. Ind. Appl. 2021, 58, 1190–1200. [Google Scholar] [CrossRef]
- Ahssan, M.R.; Ektesabi, M.; Gorji, S. Gear ratio optimization along with a novel gearshift scheduling strategy for a two-speed transmission system in electric vehicle. Energies 2020, 13, 5073. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Reference Value |
|---|---|
| Length × Width × Height (mm) | 4070 × 1770 × 1570 |
| Curb Weight (kg) | 1285 |
| Minimum Ground Clearance (mm) | 150 |
| Rolling Resistance Coefficient | 0.0085/0.0018/0.00028 |
| Frontal Area (m2) | 2.513 |
| Tire Rolling Radius (m) | 0.31 |
| Rotating Mass Conversion Coefficient | 1.03 |
| Aerodynamic Drag Coefficient | 0.28 |
| Air Density (kg/m3) | 1.19 |
| Performance | Design Objective | Value |
|---|---|---|
| Dynamic performance | Maximum Vehicle Speed (km/h) | >140 |
| 0~100 km/h Acceleration Time (s) | <13 | |
| Maximum Gradeability (%) | >30 | |
| Electric consumption | Electric energy consumption per 100 km under China light-duty vehicle test cycle (CLTC) conditions (kWh/100 km) | <9.96600 |
| Performance | Design Objective | Value |
|---|---|---|
| Dynamic performance | Maximum Vehicle Speed (km/h) | 159.20000 |
| 0~100 km/h Acceleration Time (s) | 12.49260 | |
| Maximum Gradeability (%) | 37.43000 | |
| Electric consumption | Electric energy consumption per 100 km under CLTC conditions (kWh/100 km) | 9.79640 |
| Type | Gear Ratio | Shift Speed (km/h) |
|---|---|---|
| 2-Speed AMT | 1.5/1 | 60 |
| 2-Speed AMT | 1/0.75 | 60 |
| 3-Speed AMT | 1.25/1/0.75 | 40/80 |
| 4-Speed AMT | 1.5/1.25/1/0.75 | 30/60/90 |
| Type | Gear Ratio | Shift Speed (km/h) | |||||
|---|---|---|---|---|---|---|---|
| 2-Speed AMT | 1–1.25 | 0.75–1 | 40–60 | ||||
| 3-Speed AMT | 1.375–1.125 | 1.125–0.875 | 0.875–0.625 | 30–45 | 45–90 | ||
| 4-Speed AMT | 1.375–1.125 | 1.125–1 | 1–0.875 | 0.875–0.625 | 30–45 | 45–70 | 70–90 |
| Type | Gear Ratio | Shift Speed (km/h) | Optimal Electric Consumption (kWh/100 km) | |||||
|---|---|---|---|---|---|---|---|---|
| 2-Speed AMT | 1.14480 | 0.75000 | 41.97700 | 9.89130 | ||||
| 3-Speed AMT | 1.35500 | 0.91000 | 0.73800 | 32.16900 | 55.37300 | 9.88190 | ||
| 4-Speed AMT | 1.35540 | 1.00860 | 0.87500 | 0.62510 | 30.24160 | 45.00410 | 75.00730 | 9.8671 |
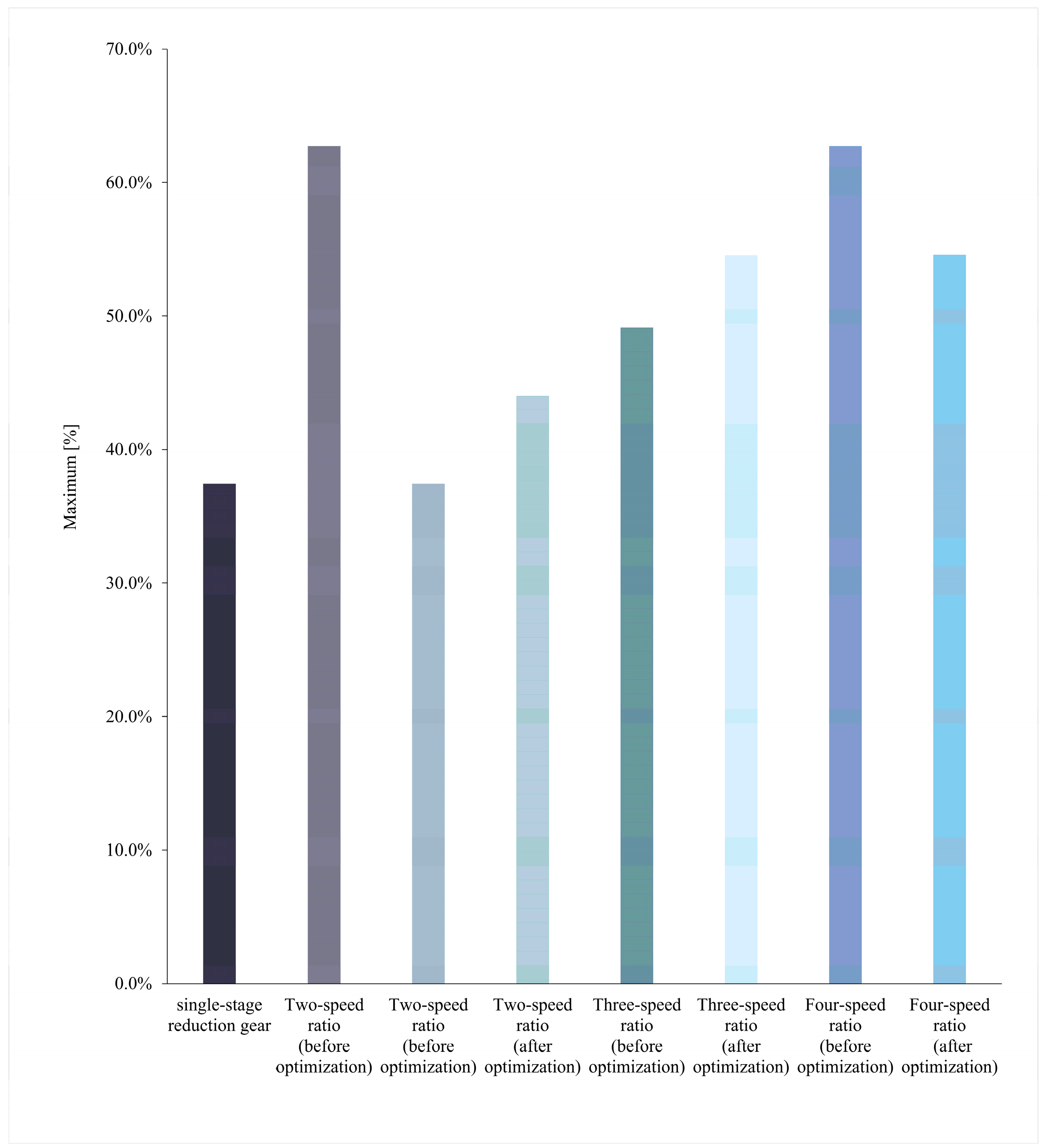
| Electric Energy Consumption per 100 km (kWh/100 km) | Maximum Vehicle Speed (km/h) | 0~100 km/h Acceleration Time (s) | Maximum Gradeability (%) | |
|---|---|---|---|---|
| Single-Motor Primary Reducer | 9.79640 | 159.20000 | 12.49260 | 37.43000 |
| Before Optimization—Two Gears | 10.15250 | 158.30000 | 11.82540 | 62.74000 |
| Before Optimization—Two Gears | 9.92060 | 162.40000 | 11.80340 | 37.43000 |
| After Optimization—Two Gears | 9.89130 | 162.40000 | 11.58140 | 44.02000 |
| Before Optimization—Three Gears | 9.89770 | 162.40000 | 11.44220 | 49.13000 |
| After Optimization—Three Gears | 9.88190 | 162.60000 | 11.57680 | 54.56000 |
| Before Optimization—Four Gears | 10.02040 | 162.40000 | 11.45740 | 62.74000 |
| After Optimization—Four Gears | 9.86710 | 164.50000 | 11.01080 | 54.58000 |
| Battery | Electric Motor | Main Reducer | AMT | ||
|---|---|---|---|---|---|
| Single-Motor Primary Reducer | Energy loss | 1.97646 | 1.63030 | 0.21842 | |
| Average efficiency | 0.92636 | 0.93672 | 0.98039 | ||
| Before Optimization—Two Gears | Energy loss | 2.04247 | 1.86692 | 0.21842 | 0.22733 |
| Average efficiency | 0.92585 | 0.92943 | 0.98039 | 0.98000 | |
| Before Optimization—Two Gears | Energy loss | 2.02277 | 1.54141 | 0.21842 | 0.22733 |
| Average efficiency | 0.92596 | 0.94115 | 0.98039 | 0.98000 | |
| After Optimization—Two Gears | Energy loss | 2.02149 | 1.49911 | 0.21842 | 0.22733 |
| Average efficiency | 0.92595 | 0.94269 | 0.98039 | 0.98000 | |
| Before Optimization—Three Gears | Energy loss | 2.02204 | 1.50812 | 0.21842 | 0.22733 |
| Average efficiency | 0.92596 | 0.94237 | 0.98039 | 0.98000 | |
| After Optimization—Three Gears | Energy loss | 2.02120 | 1.48535 | 0.21842 | 0.22733 |
| Average efficiency | 0.92595 | 0.94320 | 0.98039 | 0.98000 | |
| Before Optimization—Four Gears | Energy loss | 2.03019 | 1.68250 | 0.21842 | 0.22733 |
| Average efficiency | 0.92596 | 0.93605 | 0.98039 | 0.98000 | |
| After Optimization—Four Gears | Energy loss | 2.01877 | 1.46577 | 0.21842 | 0.22733 |
| Average efficiency | 0.92599 | 0.94391 | 0.98039 | 0.98000 |
| Motor Scaling Ratio | Electric Energy Consumption per 100 km (kWh/100 km) | ||
|---|---|---|---|
| Equal Torque Distribution between Dual Motors | Single Motor Priority | Dual-Motor Efficiency Optimization | |
| (TM1 0.5, TM2 0.5) | 9.79640 | 9.85810 | 9.61830 |
| (TM1 0.55, TM2 0.45) | 9.80800 | 9.82640 | 9.60270 |
| (TM1 0.6, TM2 0.4) | 9.82610 | 9.77700 | 9.58130 |
| (TM1 0.7, TM2 0.3) | 9.89360 | 9.75820 | 9.57510 |
| Battery | Electric Motor 1 | Electric Motor 2 | Main Reducer | ||
|---|---|---|---|---|---|
| Equal Torque Distribution between DualMotors | Energy loss | 1.97646 | 0.81515 | 0.81515 | 0.21842 |
| Average efficiency | 0.92636 | 0.93672 | 0.93672 | 0.98039 | |
| Single-Motor Priority | Energy loss | 1.99093 | 1.66425 | 0.04331 | 0.21842 |
| Average efficiency | 0.92596 | 0.93410 | 0.92307 | 0.98039 | |
| Dual-Motor Efficiency Optimization | Energy loss | 1.96765 | 0.53875 | 0.83519 | 0.21842 |
| Average efficiency | 0.92638 | 0.94527 | 0.94694 | 0.98039 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Qu, X.; Cai, Q.; Chu, F.; Wang, J.; Shi, D. Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems. World Electr. Veh. J. 2024, 15, 182. https://doi.org/10.3390/wevj15050182
Wang Z, Qu X, Cai Q, Chu F, Wang J, Shi D. Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems. World Electric Vehicle Journal. 2024; 15(5):182. https://doi.org/10.3390/wevj15050182
Chicago/Turabian StyleWang, Zhenghong, Xudong Qu, Qingling Cai, Fulin Chu, Jiaheng Wang, and Dapai Shi. 2024. "Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems" World Electric Vehicle Journal 15, no. 5: 182. https://doi.org/10.3390/wevj15050182
APA StyleWang, Z., Qu, X., Cai, Q., Chu, F., Wang, J., & Shi, D. (2024). Efficiency Analysis of Electric Vehicles with AMT and Dual-Motor Systems. World Electric Vehicle Journal, 15(5), 182. https://doi.org/10.3390/wevj15050182