
Research on Optimization of Intelligent Driving Vehicle Path Tracking Control Strategy Based on Backpropagation Neural Network


Abstract
:1. Introduction
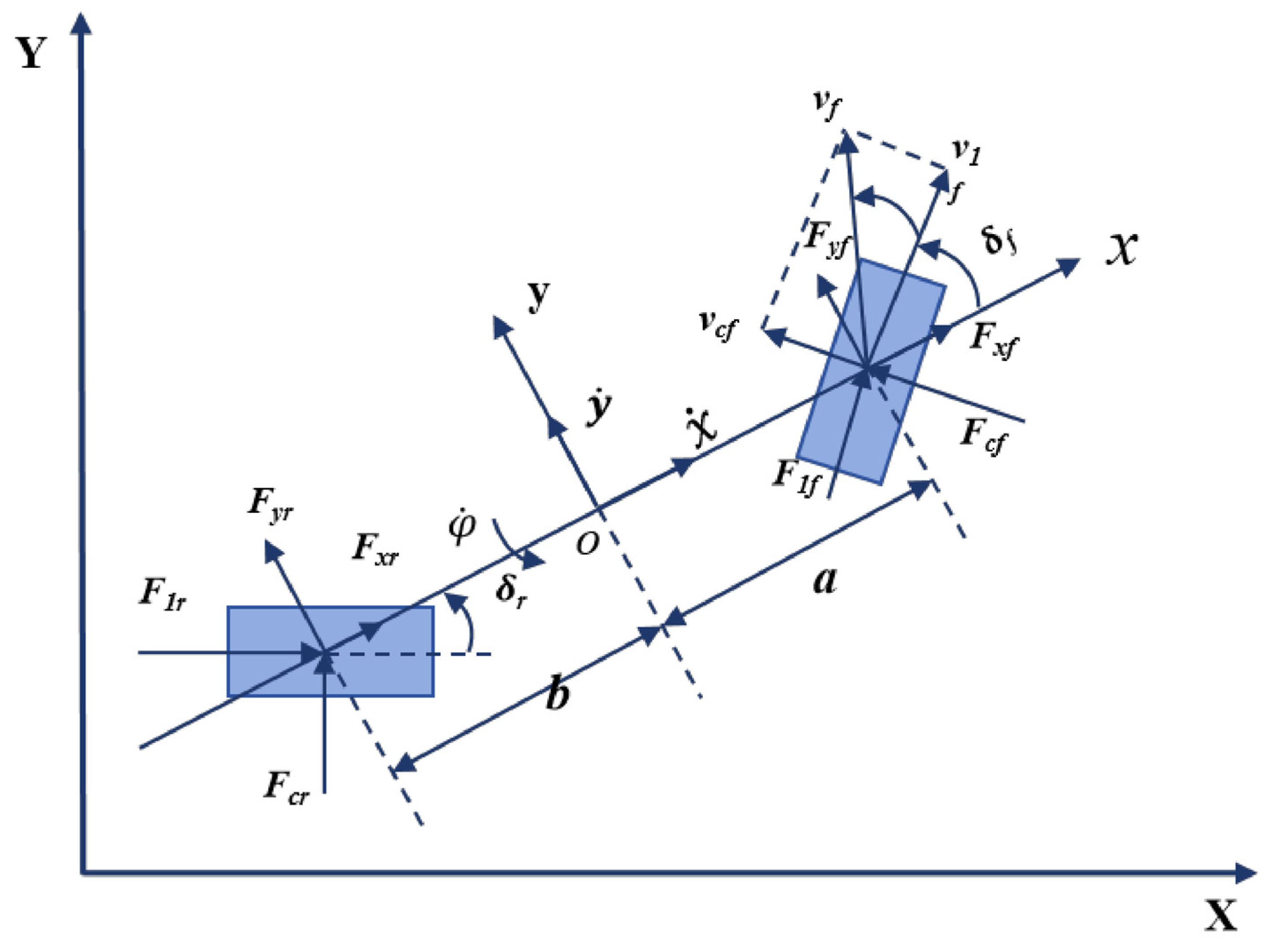
2. Vehicle Dynamics Model
2.1. Magic Formula Tire Model
2.2. Vehicle Single-Track Dynamics Model
3. Controller Design
3.1. The Construction of Horizontal Tracking Control Strategy
3.1.1. Building MPC Lateral Tracking Control Strategy
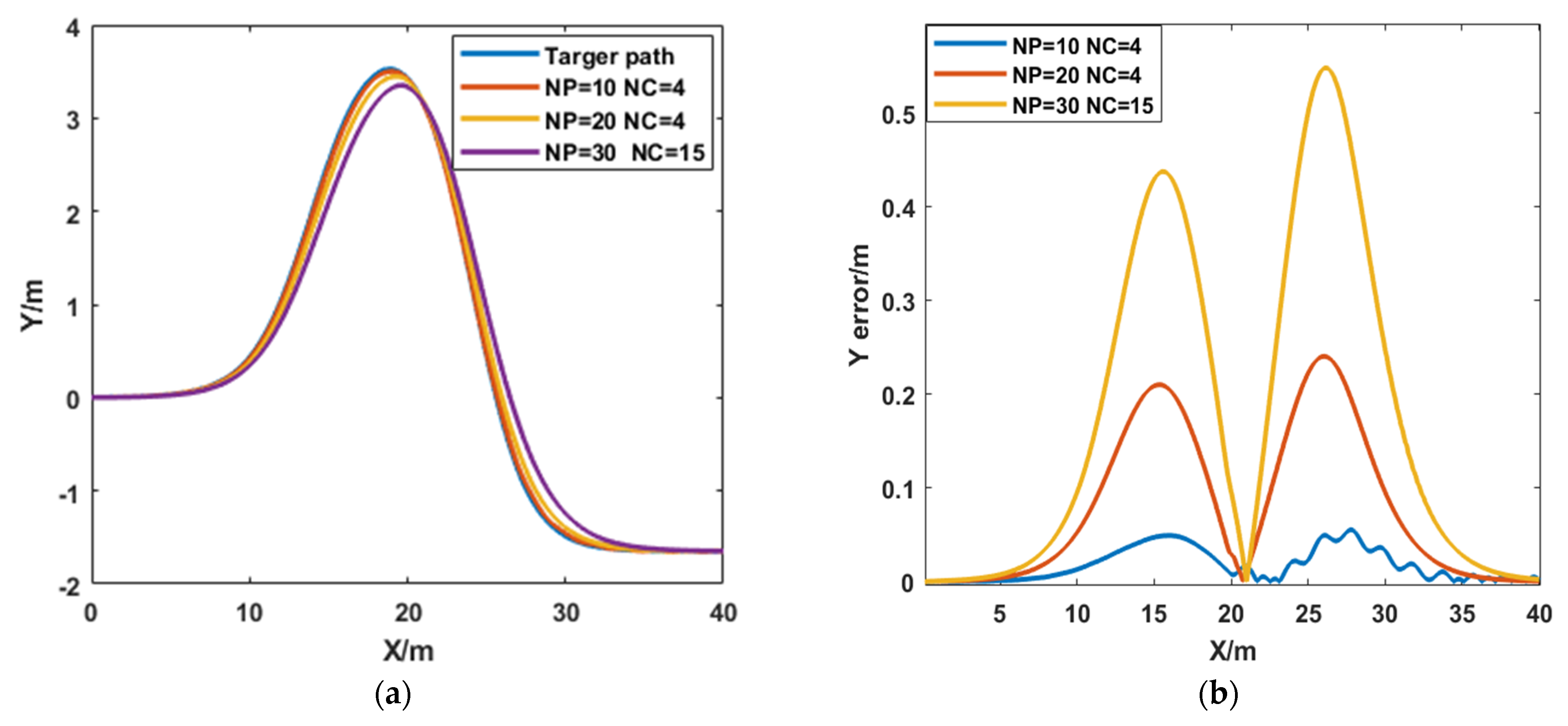
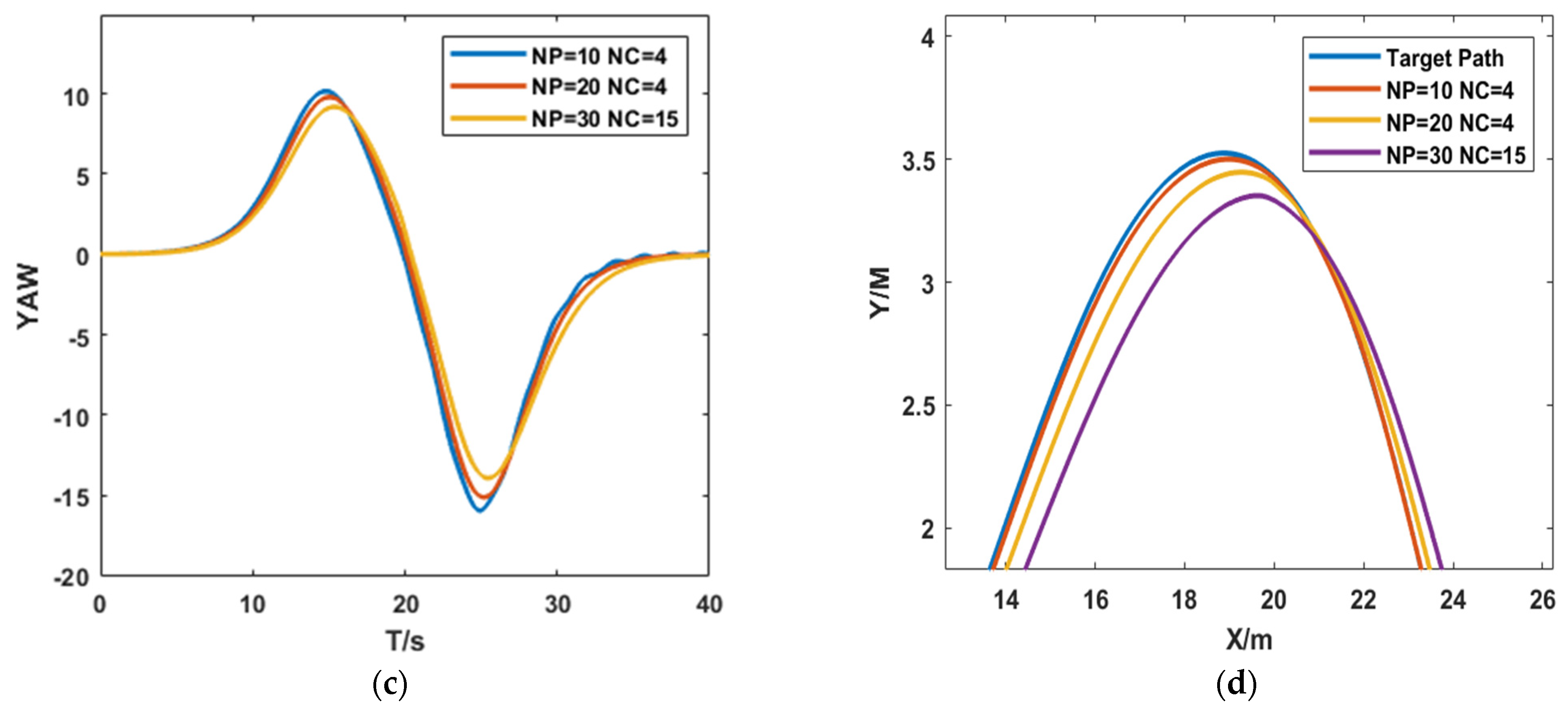
3.1.2. Analyzing the Impact of NPNC on Tracking Control Effectiveness
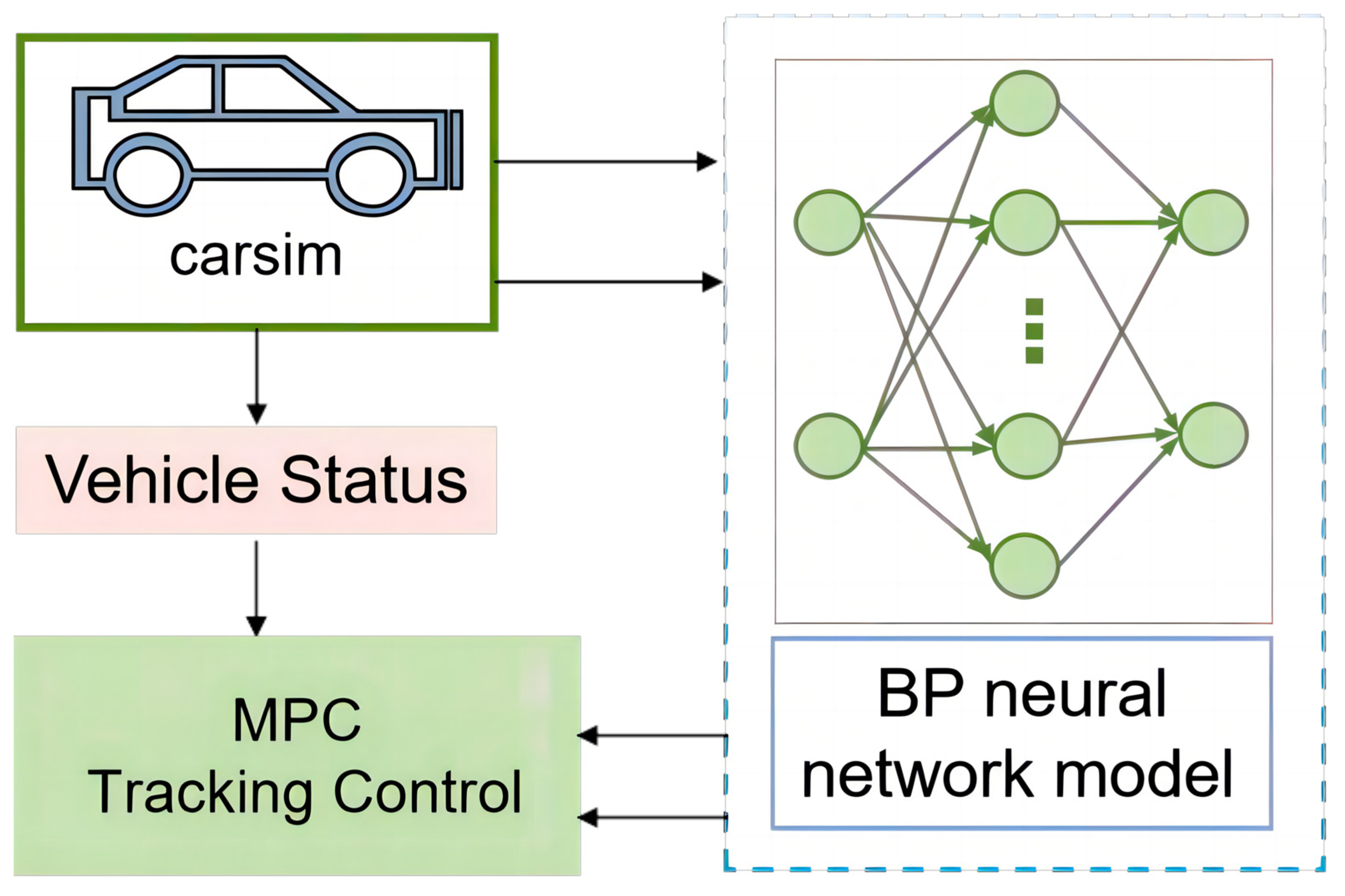
3.1.3. Build a BP Neural Network Simulation Model
3.2. Design of Longitudinal Velocity Tracking Strategy
Build PID Speed Tracking Strategy Control
4. Simulation Experiments and Analysis
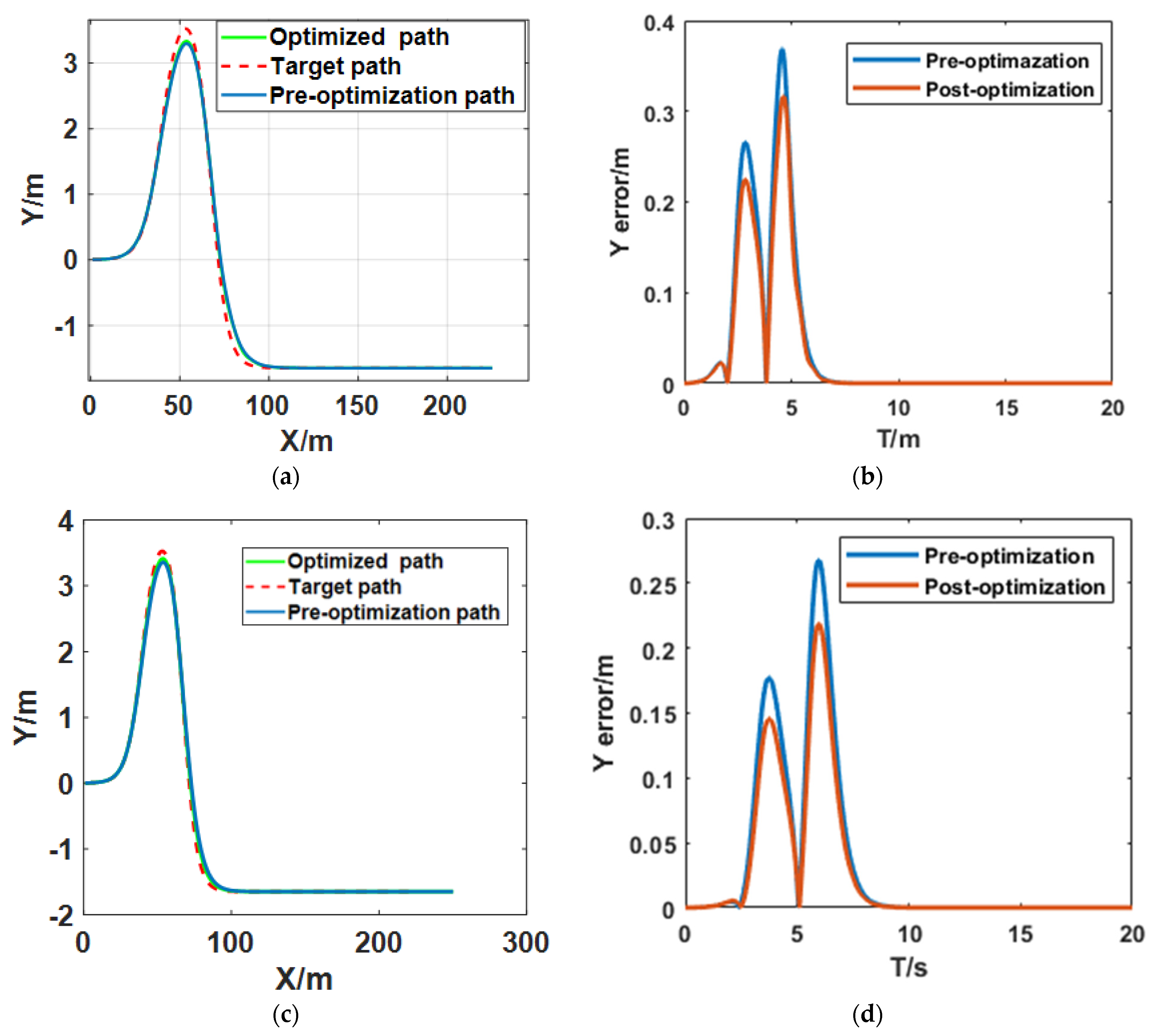
4.1. Lateral Tracking Control Optimization Validation
4.2. Simulation Analysis for Longitudinal and Horizontal Tracking Control Strategies
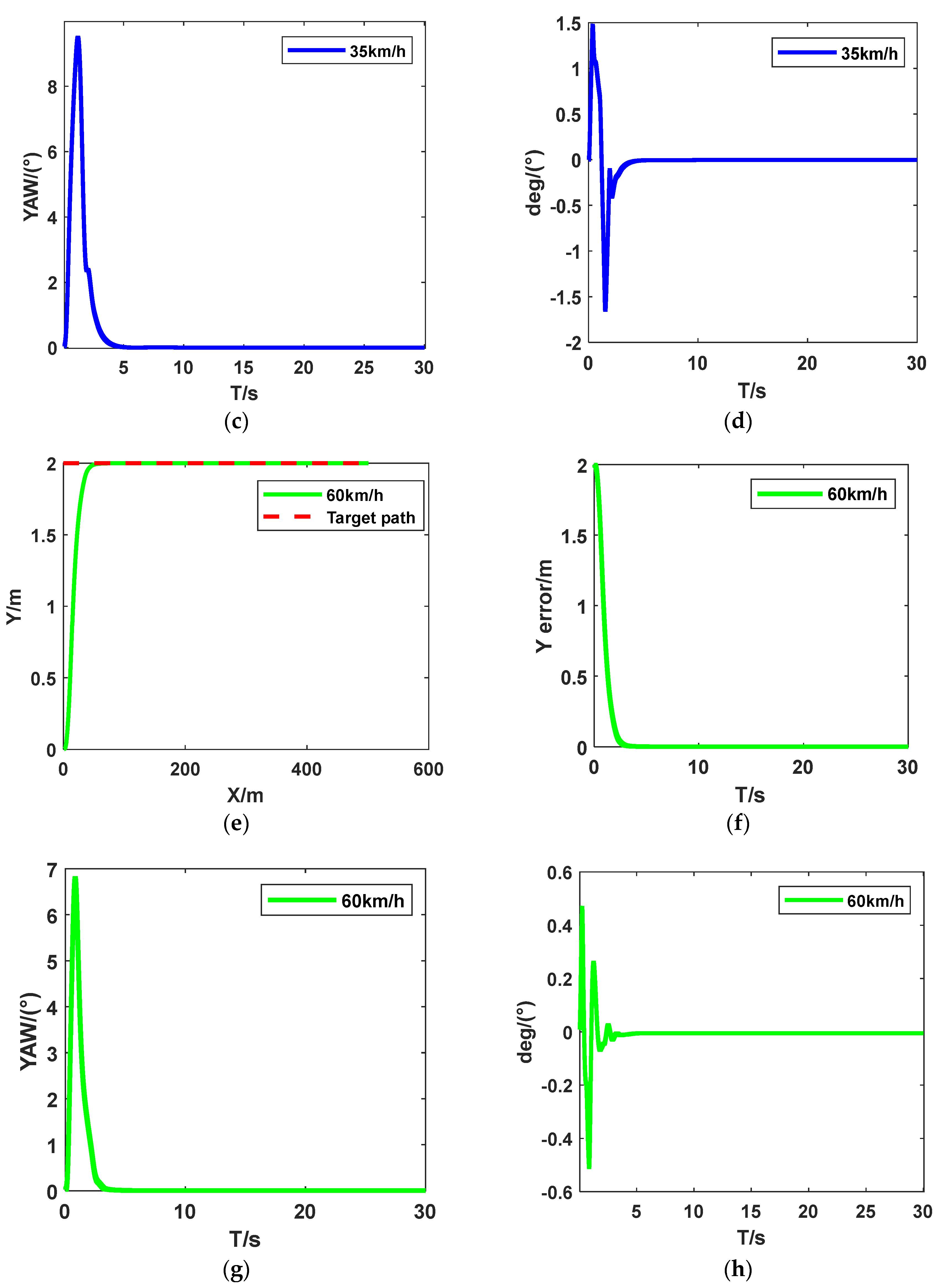
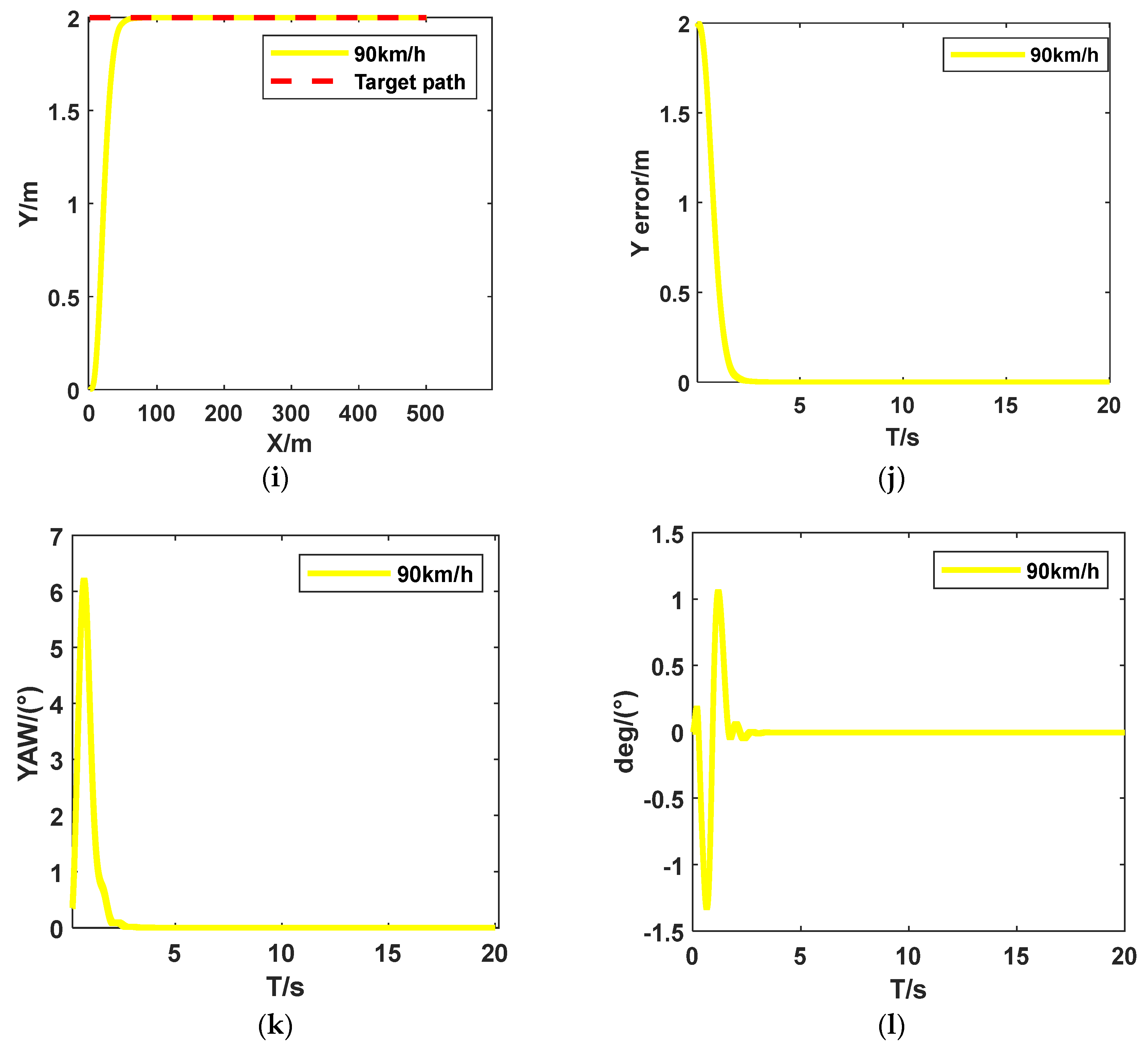
4.2.1. Straight-Line Conditions
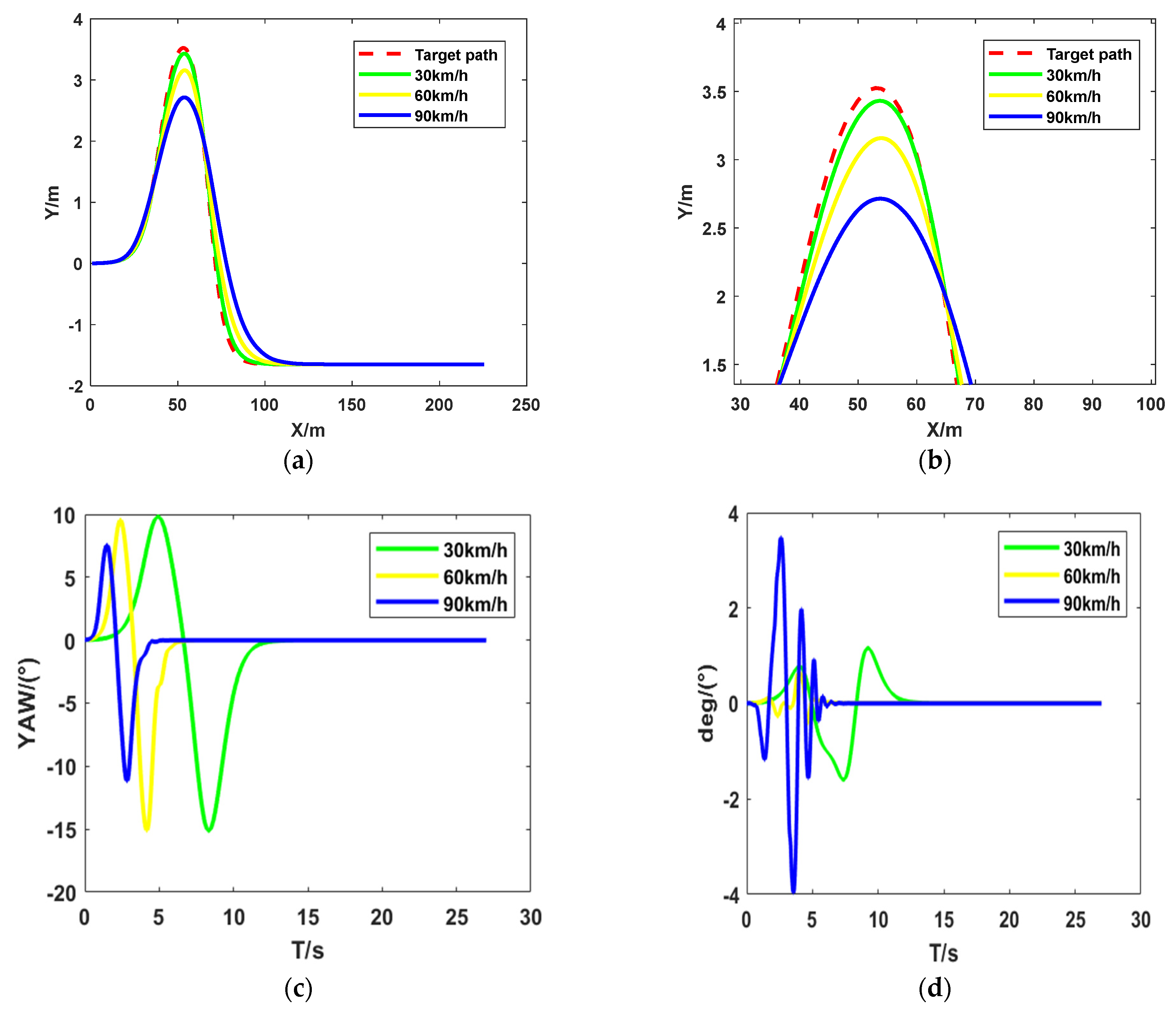
4.2.2. Biased Lane Condition
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Zha, Y.; Deng, J.; Qiu, Y.; Zhang, K.; Wang, Y. A survey of intelligent driving vehicle trajectory tracking based on vehicle dynamics. SAE Int. J. Veh. Dyn. Stab. NVH 2023, 7, 221–248. [Google Scholar] [CrossRef]
- AbdElmoniem, A.; Osama, A.; Abdelaziz, M.; Maged, S.A. A path-tracking algorithm using predictive Stanley lateral controller. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420974852. [Google Scholar] [CrossRef]
- Lal, D.S.; Vivek, A.; Selvaraj, G. Lateral control of an autonomous vehicle based on pure pursuit algorithm. In Proceedings of the 2017 International Conference on Technological Advancements in Power and Energy (Tap Energy), Kollam, India, 21–23 December 2017; pp. 1–8. [Google Scholar]
- Yu, L.; Yan, X.; Kuang, Z.; Chen, B.; Zhao, Y. Driverless bus path tracking based on fuzzy pure pursuit control with a front axle reference. Appl. Sci. 2019, 10, 230. [Google Scholar] [CrossRef]
- Li, T.; Ren, H.; Li, C. Intelligent electric vehicle trajectory tracking control algorithm based on weight coefficient adaptive optimal control. Trans. Inst. Meas. Control 2023, 01423312221141591. [Google Scholar] [CrossRef]
- Wu, H.; Li, Z.; Si, Z. Trajectory tracking control for four-wheel independent drive intelligent vehicle based on model predictive control and sliding mode control. Adv. Mech. Eng. 2021, 13, 16878140211045142. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Hui, Y.; Sun, X.; Shi, D. Neural network sliding mode control of intelligent vehicle longitudinal dynamics. IEEE Access 2019, 7, 162333–162342. [Google Scholar] [CrossRef]
- Yang, T.; Bai, Z.; Li, Z.; Feng, N.; Chen, L. Intelligent vehicle lateral control method based on feedforward+ predictive LQR algorithm. Actuators 2021, 10, 228. [Google Scholar] [CrossRef]
- Yang, C.; Liu, J. Trajectory tracking control of intelligent driving vehicles based on MPC and Fuzzy PID. Math. Probl. Eng. 2023, 2023, 2464254. [Google Scholar] [CrossRef]
- Bharali, J.; Buragohain, M. Design and performance analysis of Fuzzy LQR; Fuzzy PID and LQR controller for active suspension system using 3 Degree of Freedom quarter car model. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Tan, W.; Wang, M.; Ma, K. Research on Intelligent Vehicle Trajectory Tracking Control Based on Improved Adaptive MPC. Sensors 2024, 24, 2316. [Google Scholar] [CrossRef] [PubMed]
- Zuo, Z.; Yang, X.; Li, Z.; Wang, Y.; Han, Q.; Wang, L.; Luo, X. MPC-based cooperative control strategy of path planning and trajectory tracking for intelligent vehicles. IEEE Trans. Intell. Veh. 2020, 6, 513–522. [Google Scholar] [CrossRef]
- Kouvaritakis, B.; Cannon, M. Model Predictive Control; Springer International Publishing: Cham, Switzerland, 2016; Volume 38, pp. 13–56. [Google Scholar]
- Sun, X.; Fu, J.; Yang, H.; Xie, M.; Liu, J. An energy management strategy for plug-in hybrid electric vehicles based on deep learning and improved model predictive control. Energy 2023, 269, 126772. [Google Scholar] [CrossRef]
- Tang, L.; Yan, F.; Zou, B.; Wang, K.; Lv, C. An improved kinematic model predictive control for high-speed path tracking of autonomous vehicles. IEEE Access 2020, 8, 51400–51413. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. A review for design and dynamics control of unmanned ground vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1084–1100. [Google Scholar] [CrossRef]
- Yao, Q.; Tian, Y.; Wang, Q.; Wang, S. Control strategies on path tracking for autonomous vehicle: State of the art and future challenges. IEEE Access 2020, 8, 161211–161222. [Google Scholar] [CrossRef]
- Fu, T.; Yao, C.; Long, M.; Gu, M.; Liu, Z. Overview of longitudinal and lateral control for intelligent vehicle path tracking. In Proceedings of the 2019 Chinese Intelligent Automation Conference, Jiangsu, China, 20–22 September 2019; pp. 672–682. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NP/NC | NP = 10 NC = 4 | NP = 20 NC = 4 | NP = 30 NC = 15 |
|---|---|---|---|
| Average tracking error (m) | 0.01765 | 0.07917 | 0.1763 |
| Maximum tracking error (m) | 0.05546 | 0.2405 | 0.5485 |
| Adhesion Coefficient | Speed | ||
|---|---|---|---|
| 0.85 | 20 | 12 | 2 |
| 0.85 | 20 | 12 | 3 |
| 0.85 | 20 | 12 | 5 |
| 0.85 | 30 | 14 | 2 |
| ⋮ | ⋮ | ⋮ | ⋮ |
| ⋮ | ⋮ | ⋮ | ⋮ |
| 0.3 | 25 | 14 | 5 |
| 0.3 | 30 | 14 | 2 |
| 0.3 | 30 | 14 | 10 |
| Speed | 60 km/h | 45 km/h |
|---|---|---|
| Road grip coefficient | 0.85 | 0.85 |
| Tracking error before optimization | 0.2896 | 0.03178 |
| Tracking error after optimization | 0.2605 | 0.02533 |
| Computational time ratio before optimization ((real time)/(simulation time)) | 0.710067 | 0.5902 |
| Computational time ratio after optimization ((real time)/(simulation time)) | 0.428267 | 0.426 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Q.; Qu, X.; Wang, Y.; Shi, D.; Chu, F.; Wang, J. Research on Optimization of Intelligent Driving Vehicle Path Tracking Control Strategy Based on Backpropagation Neural Network. World Electr. Veh. J. 2024, 15, 185. https://doi.org/10.3390/wevj15050185
Cai Q, Qu X, Wang Y, Shi D, Chu F, Wang J. Research on Optimization of Intelligent Driving Vehicle Path Tracking Control Strategy Based on Backpropagation Neural Network. World Electric Vehicle Journal. 2024; 15(5):185. https://doi.org/10.3390/wevj15050185
Chicago/Turabian StyleCai, Qingling, Xudong Qu, Yun Wang, Dapai Shi, Fulin Chu, and Jiaheng Wang. 2024. "Research on Optimization of Intelligent Driving Vehicle Path Tracking Control Strategy Based on Backpropagation Neural Network" World Electric Vehicle Journal 15, no. 5: 185. https://doi.org/10.3390/wevj15050185