

Path Planning Algorithms for Smart Parking: Review and Prospects


Abstract
1. Introduction
- (1)
- Dijkstra algorithm
- (2)
- A* algorithm
- (3)
- RRT (Rapidly exploring Random Trees) algorithm
- (4)
- BFS (Breadth First Search) algorithm
2. Dijkstra Algorithm
2.1. Traditional Dijkstra Algorithm
- (1)
- Create a distance array to store the shortest distances from the source node to each node. Initially, set the distance from the source node to itself as 0, and distances to other nodes as infinity.
- (2)
- Create a set called “visit” to record the nodes with determined shortest paths.
- (3)
- Select the node “u” from the undetermined shortest path nodes that is closest to the source node and add it to the “visit” set.
- (4)
- For all neighboring nodes “v” of node “u”, if a shorter distance can be obtained through node “u”, update the shortest distance of node “v”.
- (5)
- Repeat steps 3 and 4 until all nodes are added to the “visit” set.
- (6)
- Finally, the distance array stores the shortest path lengths from the source node to other nodes.
- (7)
- Trace back the nodes in the “visit” set along the predecessor nodes of the shortest path until reaching the starting node, which represents the optimal planned path [42].
2.2. Bidirectional Dijkstra Algorithm
2.3. Landmark-Based Dijkstra Algorithm
- (1)
- Firstly, a set of landmarks (nodes that are representative of the graph) needs to be selected. These landmarks should be evenly distributed in the graph and should be able to represent the characteristics of the entire graph.
- (2)
- Then, for each pair of landmarks, the Dijkstra algorithm is used to calculate the actual distance between them. These distances are used as heuristic information to help accelerate the search for the shortest path.
- (3)
- Before conducting the search for the shortest path, the landmarks need to be preprocessed to calculate the shortest distance from each node to each landmark.
- (4)
- When it is necessary to find the shortest path from one node to another, the preprocessed information is first used to estimate the distance from the start and end points to each landmark. Combining this with the actual distance information between landmarks, the search direction is quickly determined using a heuristic method, guiding the Dijkstra algorithm to search along the most promising path.
- (5)
- Based on the information obtained from the Dijkstra algorithm search, the actual shortest path can be reconstructed.
3. A* Algorithm
3.1. Traditional A* Algorithm
- (1)
- Initialization:
- (2)
- Repeat until the target node is found or the list of nodes to be processed is empty:
- (3)
- Expand neighboring nodes:
- (4)
- Repeat steps 2 and 3 until the target node is found or the list of nodes to be processed is empty.
- (5)
- Path reconstruction:
3.2. Hybrid A* Algorithm
- (1)
- In the process of expanding nodes, the number of steps in a single expansion is a positive odd number. The length of a single expansion step, denoted as , must be such that it exceeds the current grid, as indicated by the condition in Equation (3).
- (2)
- The curvature of the expansion step is constrained by the maximum steering angle of the vehicle’s front wheel, denoted as , as indicated by the condition in Equation (4).
- (3)
- The change in the steering angle of the vehicle’s front wheel, denoted as , is a multiple of the discrete unit lateral angle , as indicated by the condition in Equation (5).
- (1)
- Initialization:
- (2)
- Repeat until the target node is found or the list of nodes to be processed is empty:
- (3)
- Adding the continuous vehicle dynamics model:
- (4)
- Expanding adjacent nodes:
- (5)
- Repeat steps 2 and 4 until the target position is found or the list of nodes to be processed is empty.
- (6)
- Path reconstruction:
3.3. The Three-Dimensional A* Algorithm
4. RRT (Rapidly Exploring Random Trees) Algorithm
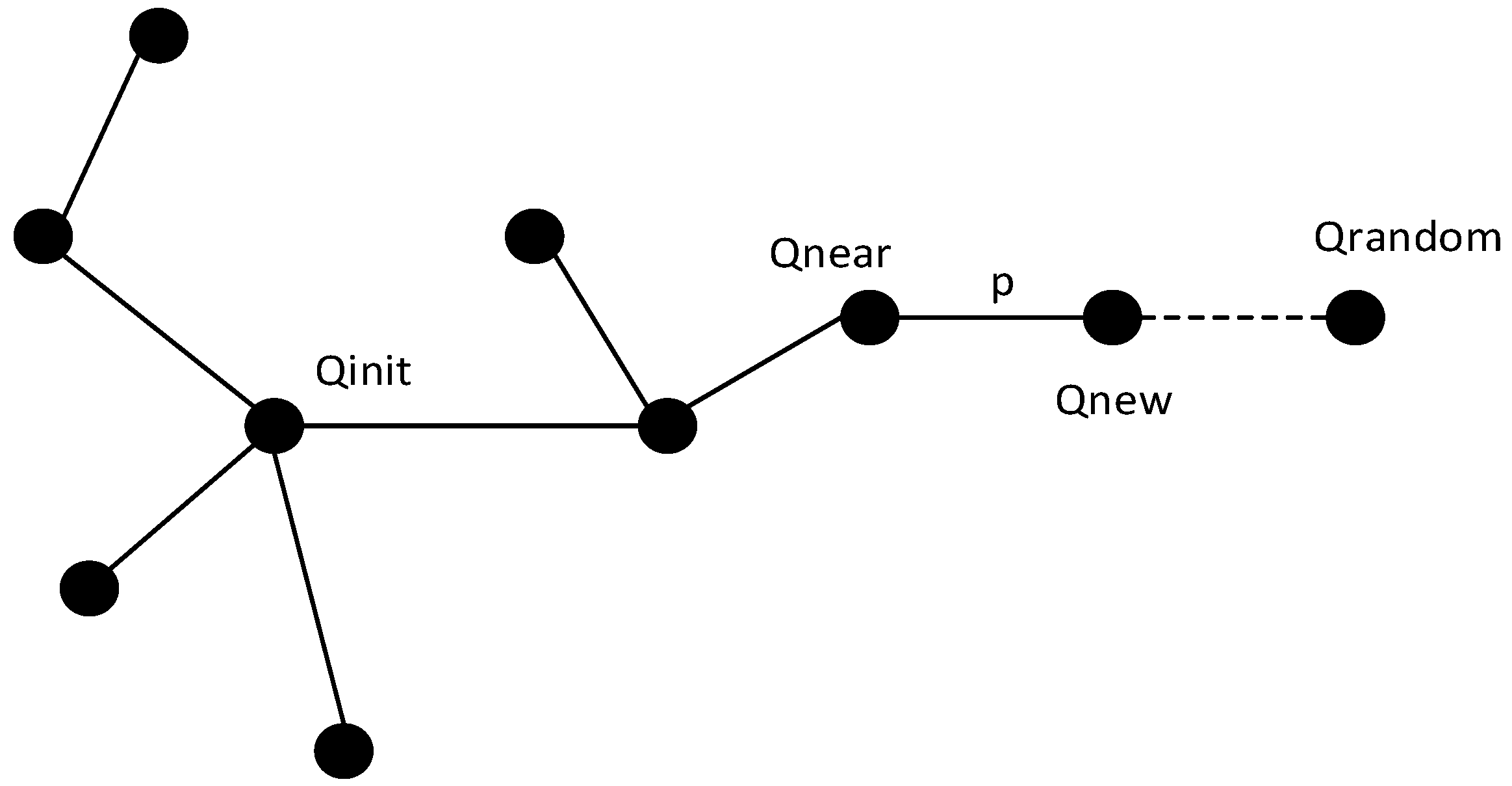
4.1. Traditional RRT Algorithm
- (1)
- Initialization:
- (2)
- Random Sampling:
- (3)
- Nearest Neighbor Node Selection:
- (4)
- Path Extension:
- (5)
- Collision Detection:
- (6)
- Connecting New Nodes:
- (7)
- Repeat steps 2–6 until reaching the endpoint or reaching the maximum iteration count.
- (8)
- After reaching the endpoint, backtrack from the endpoint along the expanded nodes to the starting point to obtain the final path.
4.2. Bi-RRT (Bidirectional RRT) Algorithm
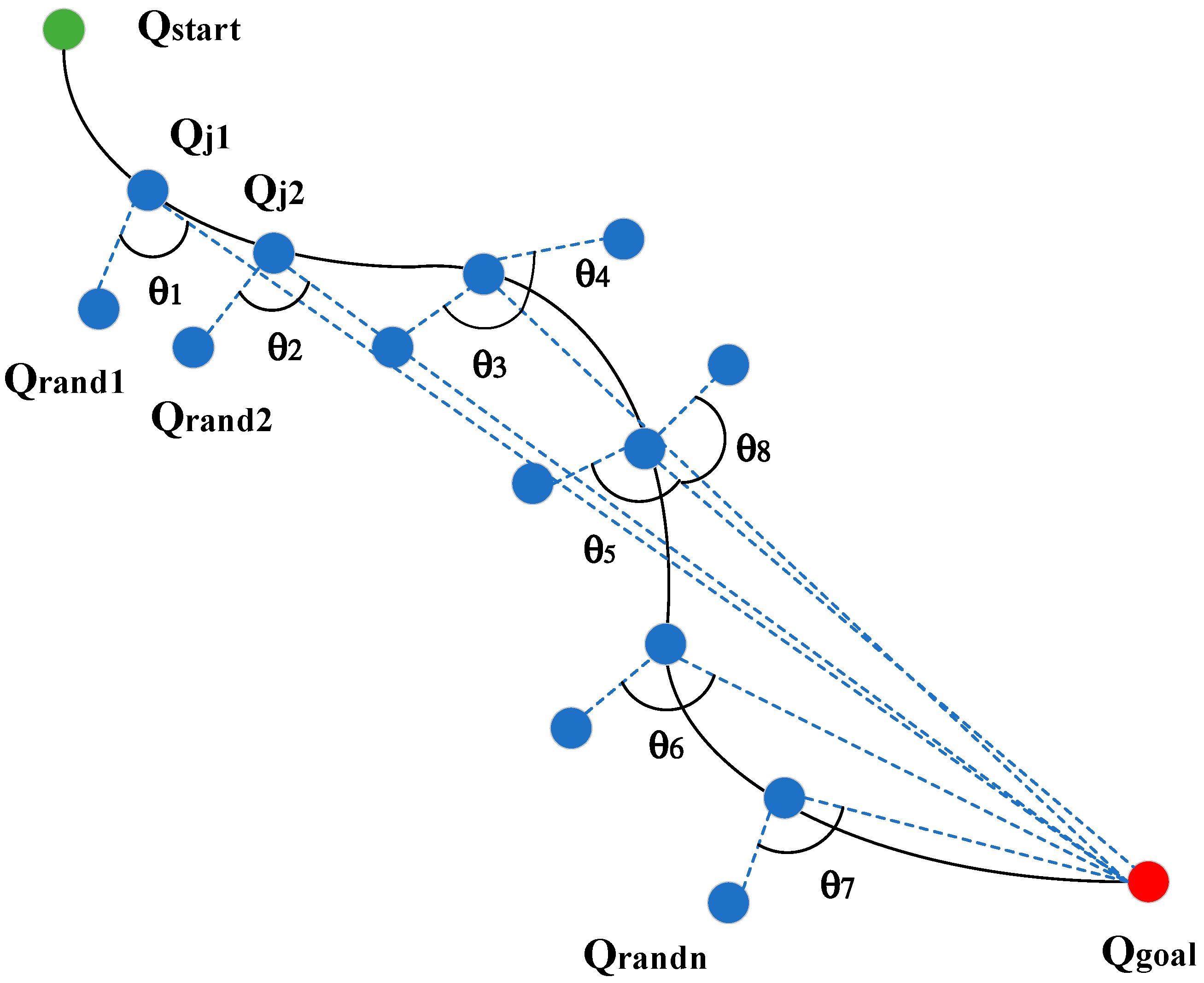
4.3. PSBi-RRT (Probabilistic Smoothed Bidirectional RRT) Algorithm
5. BFS (Breadth First Search) Algorithm
- (1)
- Initialization: mark the start node as visited point, add the start node to the queue.
- (2)
- Iterative process: first, take out a node from the queue as the current node, then check whether the current node is the goal node; if so, then the search ends. Conversely, if the current node is not the target node, then the neighbor nodes of the current node that have not been visited are added to the queue and they are marked as visited. When the queue is not empty, repeat the above iterative process until the target node is found.
- (3)
- Path backtracking: after finding the target node by backtracking nodes, so as to get the shortest path.
6. Comparison of Algorithms
7. Summary and Prospect
7.1. Summary
- (1)
- The Dijkstra algorithm, the A* algorithm, the RRT algorithm, the BFS algorithm, and their respective optimization branches were discussed. The principles of these methods were described, and the advantages and disadvantages of these methods were summarized, mainly including the efficiency of path planning, the implementation difficulty of the algorithms, and the scenarios of applications.
- (2)
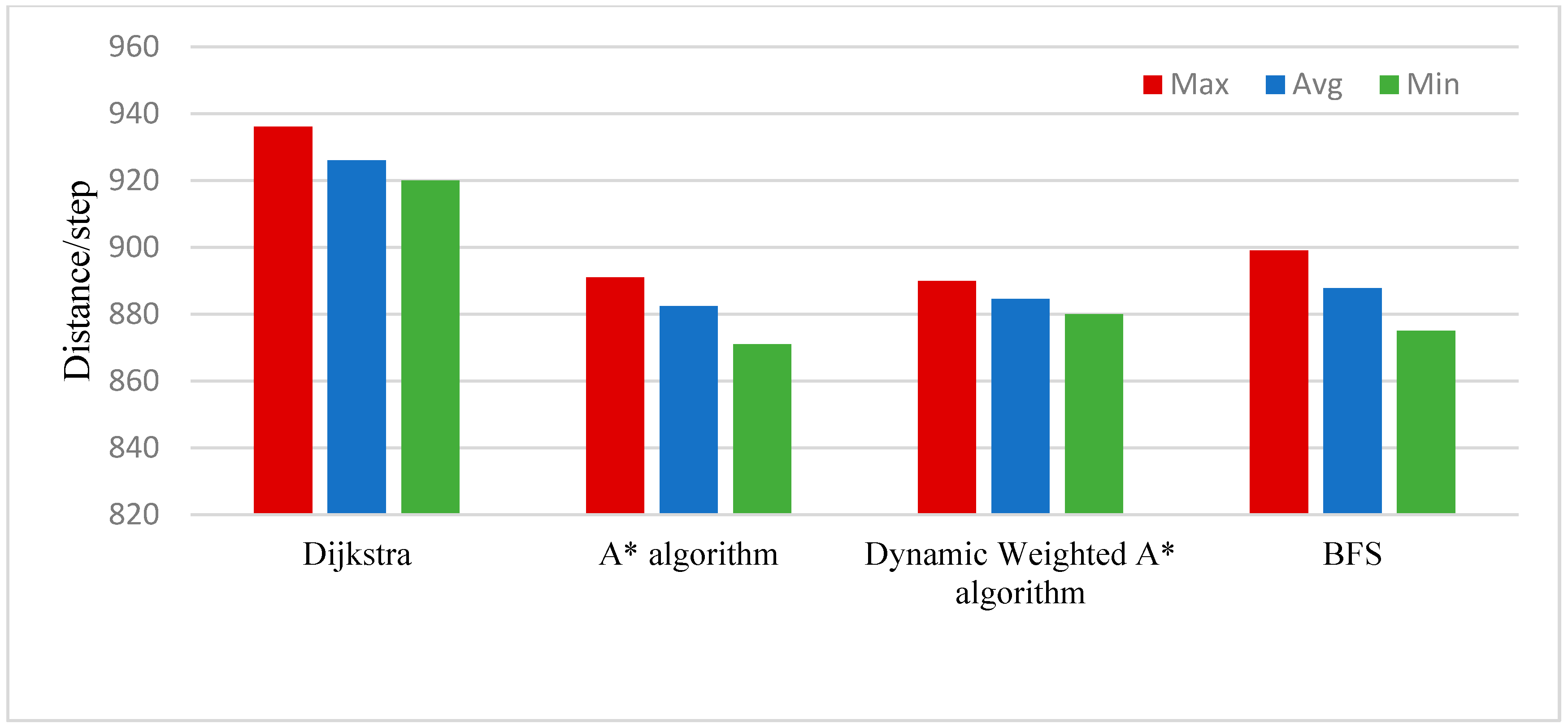
- The Dijkstra algorithm was analyzed and discussed, and through comparison, it was concluded that the algorithm had a long running time, a tortuous planning path, many redundant nodes, and a long planning distance. However, the algorithm was simpler in code implementation.
- (3)
- The A* algorithm was analyzed and discussed, and by comparison, it was concluded that the algorithm had a shorter running time, but the planned paths were ineffective, the paths were convoluted, there was more node redundancy, and the planning distance was long.
- (4)
- The Dynamic Weighted A* algorithm was analyzed and discussed, and through comparison, it was found that this algorithm had a shorter running time, better planned paths, less path distortion, fewer redundant nodes, and shorter planning distances. Additionally, the weights in this algorithm could be changed in real-time, making it highly adaptable to different environments.
- (5)
- The BFS algorithm was analyzed and discussed, and through comparison, it was found that this algorithm had a shorter running time, generally planned paths, less path distortion, and fewer redundant nodes. However, the planned distance of this algorithm was not the optimal path.
7.2. Prospect
- (1)
- When there are other vehicles or pedestrians moving in the parking scene, many current path planning algorithms may not be able to effectively deal with these dynamic obstacles, which may result in the planned routes not meeting the actual needs. In order to improve the effectiveness of path planning, it is necessary to improve the real-time recognition of dynamic obstacles by path planning algorithms. In environments with dynamic obstacles, the inclusion of the speed of dynamic obstacles as prior information in the path planning algorithm can help determine whether the vehicle can pass directly or needs to detour. This judgment will then guide the path planning to achieve obstacle avoidance in the presence of dynamic obstacles.
- (2)
- When smart parking is performed in a narrow space, the accuracy of path planning is more demanding, so the accuracy of path planning algorithms for planning paths in this parking situation needs to be improved. In narrow parking spaces, the use of higher-precision sensors can obtain more accurate environmental information. The fusion of multiple sensors can improve the accuracy of the environmental map, and improving the path planning algorithm to have more precise heuristics can be beneficial.
- (3)
- Different path planning algorithms have their own advantages for different parking environments, so it is a challenge to combine the advantages of these different path planning algorithms to improve the effectiveness of planning paths for various complex environments. The combination of different path planning algorithms can be based on environmental adaptation. By testing various excellent algorithms in different environments, vehicles can be equipped with different path planning algorithms tailored to specific conditions. These algorithms can then be combined for integrated path planning.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Estimated cost from the initial state to the goal state | |
| Current state node | |
| Actual cost from the initial state to the current state | |
| Estimated cost from the current state to the goal state | |
| Distance from the current state to the goal state | |
| Discrete location information of the vehicle’s state | |
| Origin position of the cost map coordinates | |
| Side length of the square grid | |
| Discretized unit of yaw angle | |
| Single expansion step length | |
| Expansion step curvature | |
| Maximum steering angle of the front wheels | |
| Change in the steering angle of the front wheels | |
| Penalty factor for node expansion direction | |
| Penalty factor for changing node expansion direction | |
| Scale factor for the Y-axis | |
| Cost vector | |
| Minimum cost vector | |
| Cost of waiting time | |
| Distance cost |
References
- Moore, E.F. The Shortest Path Through a Maze. In Proceedings of the International Symposium on the Theory of Switching; Harvard University Press: Cambridge, MA, USA, 1959; pp. 282–295. [Google Scholar]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Mathematik 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-exploring random trees: A new tool for path planning. Res. Rep. 1998, 10, 98–111. [Google Scholar]
- Koenig, S.; Likhachev, M.; Furcy, D. Lifelong planning A*. Artif. Intell. 2004, 155, 93–146. [Google Scholar] [CrossRef]
- Yoon, S.; Shim, D.H. SLPA*: Shape-Aware Lifelong Planning A* for Differential Wheeled Vehicles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 730–740. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Liang, K.; Yao, X.; Zhang, W. Path planning with static obstacles for USVs via the Hybrid A* algorithm and the artificial potential field method. In Proceedings of the 2022 41st Chinese Control Conference (CCC), Hefei, China, 25–27 July 2022; pp. 2894–2899. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robots. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Fan, H.; Huang, J.; Huang, X.; Zhu, H.; Su, H. BI-RRT*: An improved path planning algorithm for secure and trustworthy mobile robots systems. Heliyon 2024, 10, e26403. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Zhang, S.; Zhao, X.; Li, Q. An intelligent optimisation algorithm for vehicle path planning based on underground parking systems. In Proceedings of the 2020 International Conference on Intelligent Design (ICID), Xi’an, China, 11–13 December 2020; pp. 103–106. [Google Scholar]
- Tao, Y. Dynamic Path Planning for Parking Lot Based on Carbon Emission Optimization. In Proceedings of the 2022 IEEE Conference on Telecommunications, Optics and Computer Science (TOCS), Dalian, China, 11–12 December 2022; pp. 897–902. [Google Scholar]
- Yalin, C.; Liyang, Z.; Longbiao, Z.; Xiaojiang, S.; Heng, W. Research on path planning of parking system based on improved Dijkstra algorithm. Mod. Manuf. Eng. 2017, 443, 63. [Google Scholar]
- Liu, Z.; Yang, Y.; Li, D.; Li, X.; Lv, X.; Chen, X. Design and Implementation of the Optimization Algorithm in the Layout of Parking Lot Guidance. In Proceedings of the 2020 16th International Conference on Computational Intelligence and Security (CIS), Guangxi, China, 27–30 November 2020; pp. 144–148. [Google Scholar]
- Zhou, B.; Chang, Y.; Sun, C. Path optimization research based on parking conflicts in large parking lots. J. Chongqing Univ. Technol. 2021, 35, 26–33. [Google Scholar]
- Li, Y.; Shi, B.; Wang, T.; Wang, Q.; Wu, L. Research on Intelligent Parking Area Division and Path Planning. In Advances in Internet, Data & Web Technologies, Proceedings of the 6th International Conference on Emerging Internet, Data & Web Technologies (EIDWT-2018), Tirana, Albania, 15–17 March 2018; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Tao, G. The application of intelligent vehicle parking trajectory planning. Automot. Pract. Technol. 2022, 47, 31–35. [Google Scholar]
- Zhang, X.; Liniger, A.; Sakai, A.; Borrelli, F. Autonomous Parking Using Optimization-Based Collision Avoidance. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 4327–4332. [Google Scholar]
- Lu, B.L. Research on Path Planning and Tracking Control of Autonomous Parking System for Intelligent Vehicles. Master’ s Thesis, Changchun University of Technology, Changchun, China, 2023. [Google Scholar]
- Zhang, Y.; Chen, Y.; Wei, L. Intelligent Parking Algorithm for AGV Based on Improved A* Algorithm. Comput. Syst. Appl. 2019, 28, 216–221. [Google Scholar]
- Sedighi, S.; Nguyen, D.V.; Kuhnert, K.D. Guided hybrid A-star path planning algorithm for valet parking applications. In Proceedings of the 2019 5th International Conference on Control Automation and Robotics, Beijing, China, 19–22 April 2019; pp. 570–575. [Google Scholar]
- Klaudt, S.; Zlocki, A.; Eckstein, L. A-priori map information and path planning for automated valet-parking. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Redondo, CA, USA, 11–14 June 2017. [Google Scholar]
- Min, K.W.; Choi, J.D. Design and implementation of an intelligent vehicle system for autonomous valet parking service. In Proceedings of the 2015 10th Asian Control Conference, Sabah, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Shi, Y.; Wang, P.; Wang, X. An Autonomous Valet Parking Algorithm for Path Planning and Tracking. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–7. [Google Scholar]
- Xie, G.; Fang, L.; Su, X.; Guo, D.; Qi, Z.; Li, Y.; Che, J. A Path-Planning Approach for an Unmanned Vehicle in an Off-Road Environment Based on an Improved A* Algorithm. World Electr. Veh. J. 2024, 15, 234. [Google Scholar] [CrossRef]
- Huang, J.; Liu, Z.; Chi, X.; Hong, F.; Su, H. Search-Based Path Planning Algorithm for Autonomous Parking: Multi-Heuristic Hybrid A*. In Proceedings of the 2022 34th Chinese Control and Decision Conference (CCDC), Hefei, China, 15–17 August 2022; pp. 6248–6253. [Google Scholar]
- Wang, Y.; Hansen, E.; Ahn, H. Hierarchical Planning for Autonomous Parking in Dynamic Environments. IEEE Trans. Control Syst. Technol. 2024, 32, 1386–1398. [Google Scholar] [CrossRef]
- Liu, T.; Yang, J.; Wang, W. A Hierarchical Optimization Framework for Parking Maneuver of Automated Vehicle. In Proceedings of the 2022 6th International Conference on Automation, Control and Robots (ICACR), Shanghai, China, 23–25 September 2022; pp. 156–160. [Google Scholar]
- He, J.; Li, H. Fast A* Anchor Point based Path Planning for Narrow Space Parking. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 1604–1609. [Google Scholar]
- Sheng, W.; Li, B.; Zhong, X. Autonomous Parking Trajectory Planning with Tiny Passages: A Combination of Multistage Hybrid A-Star Algorithm and Numerical Optimal Control. IEEE Access 2021, 9, 102801–102810. [Google Scholar] [CrossRef]
- Han, L.; Do, Q.H.; Mita, S. Unified path planner for parking an autonomous vehicle based on RRT. In Unified Path Planner for Parking an Autonomous Vehicle Based on RRT, Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: New York, NY, USA, 2011; pp. 5622–5627. [Google Scholar]
- Zheng, K.; Liu, S. RRT based path planning for autonomous parking of vehicle. In Proceedings of the IEEE 7th Data-Driven Control and Learning Systems Conference, Enshi, China, 25–27 May 2018; pp. 627–632. [Google Scholar]
- Kim, M.; Ahn, J.; Park, J. TargetTree-RRT*: Continuous-Curvature Path Planning Algorithm for Autonomous Parking in Complex Environments. IEEE Trans. Autom. Sci. Eng. 2024, 21, 606–617. [Google Scholar] [CrossRef]
- Wang, S.; Li, G.; Liu, B. Research on Unmanned Vehicle Path Planning Based on the Fusion of an Improved Rapidly Exploring Random Tree Algorithm and an Improved Dynamic Window Approach Algorithm. World Electr. Veh. J. 2024, 15, 292. [Google Scholar] [CrossRef]
- Dong, Y.; Zhong, Y.; Hong, J. Knowledge-Biased Sampling-Based Path Planning for Automated Vehicles Parking. IEEE Access 2020, 8, 156818–156827. [Google Scholar] [CrossRef]
- Cheng, Q.; Wang, Y. Research on Path Planning for Automatic Parking Based on RRT* Algorithm. In Proceedings of the 2023 International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 18–19 August 2023; pp. 507–512. [Google Scholar]
- Nidhi, A.; Fukuta, N. Towards Path Planning and Environmental Recognition for Autonomous Car Parking with Multiagent Control. In Proceedings of the 2021 10th International Congress on Advanced Applied Informatics (IIAI-AAI), Niigata, Japan, 11–16 July 2021; pp. 549–552. [Google Scholar]
- Delling, D.; Goldberg, A.V.; Nowatzyk, A.; Werneck, R.F. PHAST: Hardware-accelerated shortest path trees. J. Parallel Distrib. Comput. 2013, 73, 940–952. [Google Scholar] [CrossRef]
- Zhang, H.Y. Design and Implementation of Shortest Train Path under Emergency Events Based on Dijkstra’s Algorithm. China Storage Transp. 2023, 104–105. [Google Scholar]
- Alyasin, A.; Abbas, E.I.; Hasan, S.D. An Efficient Optimal Path Finding for Mobile Robot Based on Dijkstra Method. In Proceedings of the 2019 4th Scientific International Conference Najaf (SICN), Al-Najef, Iraq, 29–30 April 2019; pp. 11–14. [Google Scholar]
- Bozyiğit, A.; Alankuş, G.; Nasiboğlu, E. Public transport route planning: Modified dijkstra’s algorithm. In Proceedings of the 2017 International Conference on Computer Science and Engineering (UBMK), Antalya, Turkey, 5–8 October 2017; pp. 502–505. [Google Scholar]
- Curtin, K.M. Network Analysis in Geographic Information Science: Review Assessment and Projections. Cartogr. Geogr. Inf. Sci. 2007, 34, 103–111. [Google Scholar] [CrossRef]
- Jasika, N.; Alispahic, N.; Elma, A.; Ilvana, K.; Elma, L.; Nosovic, N. Dijkstra’s shortest path algorithm serial and parallel execution performance analysis. In Proceedings of the 35th International Convention, MIPRO, Opatija, Croatia, 21–25 May 2012; pp. 1811–1815. [Google Scholar]
- Wu, R.E.; Lou, P.H. Optimal Parking Path Planning for Large Parking Lot Based on Dijkstra’s Algorithm. Ind. Control. Comput. 2013, 26, 93–95. [Google Scholar]
- Ning, S.; Zhong, J.; Zheng, X. Design of Virtual Intelligent Parking Lot System Based on Signal Request Mechanism. In Proceedings of the 2021 IEEE 24th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Dalian, China, 5–7 May 2021; pp. 593–597. [Google Scholar]
- Yijun, Z.; Jiadong, X.; Chen, L. A Fast Bi-Directional A* Algorithm Based on Quad-Tree Decomposition and Hierarchical Map. IEEE Access 2021, 9, 102877–102885. [Google Scholar] [CrossRef]
- Gbadamosi, O.A.; Aremu, D.R. Design of a Modified Dijkstra’s Algorithm for finding alternate routes for shortest-path problems with huge costs. In Proceedings of the 2020 International Conference in Mathematics, Computer Engineering and Computer Science (ICMCECS), Ayobo, Nigeria, 18–21 March 2020; pp. 1–6. [Google Scholar]
- Zou, Y.M.; Yang, G.; Gao, B.Y. A path planning for robot obstacle avoidance based on Dijkstra algorithm. Math. Pract. Underst. 2013, 43, 111–118. [Google Scholar]
- Parekh, S.; Jha, A.; Dalvi, A.; Siddavatam, I. An Exhaustive Approach Orchestrating Negative Edges for Dijkstra’s Algorithm. In Proceedings of the 2022 IEEE 7th International conference for Convergence in Technology (I2CT), Mumbai, India, 7–9 April 2022; pp. 1–5. [Google Scholar]
- Delling, D.; Sanders, P.; Schultes, D.; Wagner, D. Engineering Route Planning Algorithms; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Chen, L.; Zhou, J.; Li, J.; Chen, Y. Bidirectional Dijkstra algorithm for best-routing of urban traffic network. Proc. SPIE 2007, 6754, 431–438. [Google Scholar]
- Verma, D.; Messon, D.; Rastogi, M.; Singh, A. Comparative Study of Various Approaches Of Dijkstra Algorithm. In Proceedings of the 2021 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 7–9 April 2021; pp. 328–336. [Google Scholar]
- Zhou, Z.; Wang, T.F.; Dai, G.M. Bidirectional Dijkstra binary tree algorithm for robot path planning. Comput. Eng. 2007, 33, 36–37+40. [Google Scholar]
- Nichat, M. Landmark based shortest path detection by using Dijkestra Algorithm and Haversine Formula. Int. J. Eng. Res. Appl. 2013, 3, 162. [Google Scholar]
- Aziz, A.; Tasfia, S.; Akhtaruzzaman, M. A Comparative Analysis among Three Different Shortest Path-finding Algorithms. In Proceedings of the 2022 3rd International Conference for Emerging Technology (INCET), Belgaum, India, 27–29 May 2022; pp. 1–4. [Google Scholar]
- Gonçalves, S.M.M.; da Rosa, L.S.; de Marques, F.S. An Improved Heuristic Function for A∗-Based Path Search in Detailed Routing. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; pp. 1–5. [Google Scholar]
- Xu, Z.; Liu, X.; Chen, Q. Application of Improved Astar Algorithm in Global Path Planning of Unmanned Vehicles. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 2075–2080. [Google Scholar]
- Fernandes, E.; Costa, P.; Lima, J.; Veiga, G. Towards an orientation enhanced astar algorithm for robotic navigation. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 3320–3325. [Google Scholar]
- Candra, A.; Budiman, M.A.; Hartanto, K. Dijkstra’s and a-star in finding the shortest path: A tutorial. In Proceedings of the 2020 International Conference on Data Science Artificial Intelligence and Business Analytics, Medan, Indonesia, 16–17 July 2020; pp. 28–32. [Google Scholar]
- Pan, H.; Guo, C.; Wang, Z. Research for path planning based on improved astart algorithm. In Proceedings of the 2017 4th International Conference on Information, Cybernetics and Computational Social Systems (ICCSS), Dalian, China, 24–26 July 2017; pp. 225–230. [Google Scholar]
- Bell, B.G.H. Hyperstar: A multi-path Astar algorithm for risk averse vehicle navigation. Transp. Res. Part B Methodol. 2009, 43, 97–107. [Google Scholar] [CrossRef]
- Ferguson, D.; Howard, T.M.; Likhachev, M. Motion planning in urban environments. J. Field Robot. 2008, 25, 939–960. [Google Scholar] [CrossRef]
- Li, K.; Lu, J.-G.; Zhang, Q.-H. A Novel Scenario-based Path Planning Method for Narrow Parking Space. In Proceedings of the 2023 35th Chinese Control and Decision Conference (CCDC), Yichang, China, 20–22 May 2023; pp. 754–759. [Google Scholar]
- Tian, Z.; Zhang, P.; Feng, K.; Tang, Y.; Lu, Y. Research on Vertical Parking Path Planning of Semi-trailer Train Based on Improved Hybrid A* Algorithm. In Proceedings of the 2022 2nd International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology (CEI), Nanjing, China, 23–25 September 2022; pp. 776–780. [Google Scholar]
- Varga, G.G.; Kondákor, A.; Antal, M. Developing an Autonomous Valet Parking System in Simulated Environment. In Proceedings of the 2021 IEEE 19th World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 21–23 January 2021; pp. 373–380. [Google Scholar]
- Zhou, J.; He, R.; Wang, Y.; Jiang, S.; Zhu, Z.; Hu, J.; Luo, Q. Autonomous driving trajectory optimization with dual-loop iterative anchoring path smoothing and piecewise-jerk speed optimization. IEEE Robot. Autom. Lett. 2021, 6, 439–446. [Google Scholar] [CrossRef]
- Su, J.; Zhang, L.; Xu, C.; He, T. Guided-TargetTree-Hybrid_A* Path Planning Algorithm for Vertical Parking. In Proceedings of the 2023 3rd International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology (CEI), Wuhan, China, 15–17 December 2023; pp. 813–816. [Google Scholar]
- Elshennawy, S.M.; Mohamed, O.; Mostafa, T.; Nagui, S.; Magdy, M.; Radwan, M.; Elganzory, R. Automating the Parking Process: A Study on Motion Planning Techniques for Autonomous Vehicles. In Proceedings of the 2023 Eleventh International Conference on Intelligent Computing and Information Systems (ICICIS), Cairo, Egypt, 21–23 November 2023; pp. 586–591. [Google Scholar]
- Xiong, L.; Gao, J.; Fu, Z.; Xiao, K. Path planning for automatic parking based on improved Hybrid A* algorithm. In Proceedings of the 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 29–31 October 2021; pp. 1–5. [Google Scholar]
- Oh, I.H.; Seo, J.W.; Kim, J.S.; Chung, C.C. Reachable Set-Based Path Planning for Automated Vertical Parking System. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; pp. 1194–1200. [Google Scholar]
- Ferguson, D.; Kalra, N.; Stentz, A. Replanning with rrts. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation 2006, Orlando, FL, USA, 15–19 May 2006; pp. 1243–1248. [Google Scholar]
- Yang, H.; Li, H.; Liu, K.; Yu, W.; Li, X. Research on path planning based on improved RRT-Connect algorithm. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 5707–5712. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J. Rapidly-exploring random trees: Progress and prospects. In Algorithmic Computer Robotics: New Directions; A K Peters: Natick, MA, USA, 2000; pp. 293–308. [Google Scholar]
- Solmaz, S.; Muminovic, R.; Civgin, A.; Stettinger, G. Development, Analysis, and Real-life Benchmarking of RRT-based Path Planning Algorithms for Automated Valet Parking. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 621–628. [Google Scholar]
- Qiu, T.M. A Review of Motion Planning for Urban Autonomous Driving. In Proceedings of the 2023 4th International Seminar on Artificial Intelligence, Networking and Information Technology (AINIT), Nanjing, China, 16–18 June 2023; pp. 32–36. [Google Scholar]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 995–1001. [Google Scholar]
- Shum, A.; Morris, K.; Khajepour, A. Direction-dependent optimal path planning for autonomous vehicles. Robot. Auton. Syst. 2015, 70, 202–214. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, Q.; Guo, Y.; Han, W. Path Planning for Lunar Rover Based on Bi-RRT Algorithm. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 4211–4216. [Google Scholar]
- Ma, G.J.; Duan, Y.L.; Li, M.Z.; Xie, Z.B.; Zhu, J. A probability smoothing Bi-RRT path planning algorithm for indoor robot. Future Gener. Comput. Syst. 2023, 143, 349–360. [Google Scholar] [CrossRef]
- Baidari, I.; Hanagawadimath, A. Traversing directed cyclic and acyclic graphs using modified BFS algorithm. In Proceedings of the 2014 Science and Information Conference, London, UK, 27–29 August 2014; pp. 175–181. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Type | Dijkstra Algorithm | A* Algorithm | Dynamic Weighted A* Algorithm | |
|---|---|---|---|---|
| Average time/s | 37.55646 | 8.51920 | 8.02936 | 6.39286 |
| Average distance/step | 926 | 882.4 | 884.6 | 887.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Sun, H.; Huang, J.; Xu, J.; Tang, Y.; Liu, X. Path Planning Algorithms for Smart Parking: Review and Prospects. World Electr. Veh. J. 2024, 15, 322. https://doi.org/10.3390/wevj15070322
Han Z, Sun H, Huang J, Xu J, Tang Y, Liu X. Path Planning Algorithms for Smart Parking: Review and Prospects. World Electric Vehicle Journal. 2024; 15(7):322. https://doi.org/10.3390/wevj15070322
Chicago/Turabian StyleHan, Zhonghai, Haotian Sun, Junfu Huang, Jiejie Xu, Yu Tang, and Xintian Liu. 2024. "Path Planning Algorithms for Smart Parking: Review and Prospects" World Electric Vehicle Journal 15, no. 7: 322. https://doi.org/10.3390/wevj15070322
APA StyleHan, Z., Sun, H., Huang, J., Xu, J., Tang, Y., & Liu, X. (2024). Path Planning Algorithms for Smart Parking: Review and Prospects. World Electric Vehicle Journal, 15(7), 322. https://doi.org/10.3390/wevj15070322