

Energy-Aware 3D Path Planning by Autonomous Ground Vehicle in Wireless Sensor Networks

Abstract
:1. Introduction
- This paper consider the energy-aware path planning problem with an automated guided vehicle (AGV) in a 3D environment different from most of the related literature.
- This research gives a comparative study of three commonly used approaches for three-dimensional path planning by an AGV. The discussion focuses on the challenges that arise while collecting data in wireless sensor networks.
- We propose the Nearest Neighbour (NN)-based approach as a method that can be utilized in the real world to solve the three-dimensional path planning problem. This method considers the computing limitations that emerge during the process.
- A modified version of the Nearest Neighbour algorithm, the Obstacle-Avoided Nearest Neighbour (OANN)-based approach, is proposed as a solution for avoiding obstacles to the three-dimensional path planning problem. The travelling constraints occurring between particular sensor pairs are considered whenever this strategy is utilized.
2. Related Work
3. System Model and Problem Definition
3.1. System Model
3.2. Problem Definition
4. Proposed Energy-Aware Path Planning (EAPP) Approaches
4.1. Nearest Neighbour (NN)-Based Approach
4.2. Grey Wolf Optimizer (GWO)-Based Approach
4.3. Genetic Algorithm (GA)-Based Approach
4.4. Computational Complexity
4.4.1. Computational Complexity of NN-Based Approach
4.4.2. Computational Complexity of GA-Based Approach
4.4.3. Computational Complexity of GWO-Based Approach
5. Obstacle-Avoided Nearest Neighbour (OANN)-Based Approach
6. Numerical Results
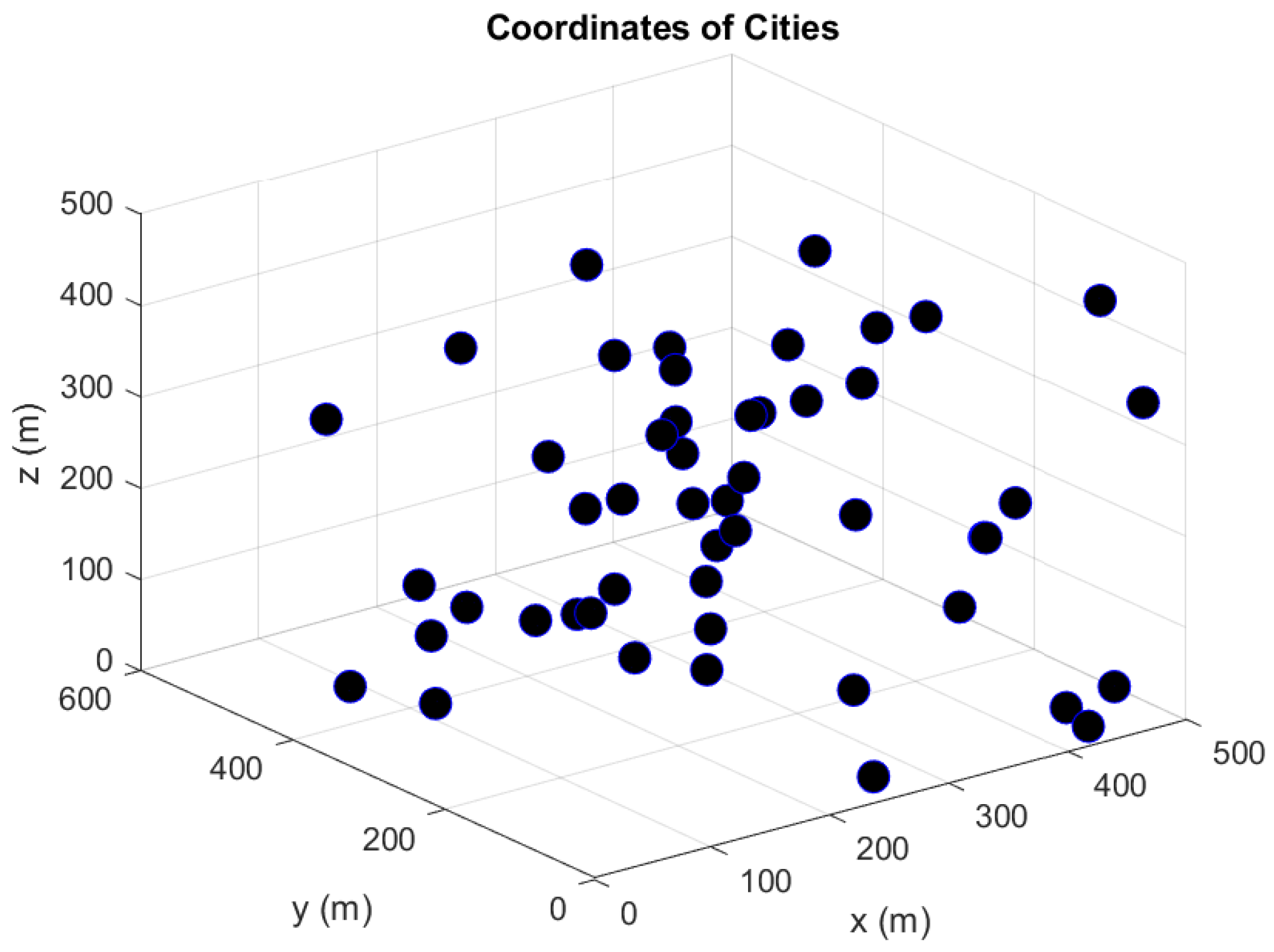
6.1. 50-Node Scenario
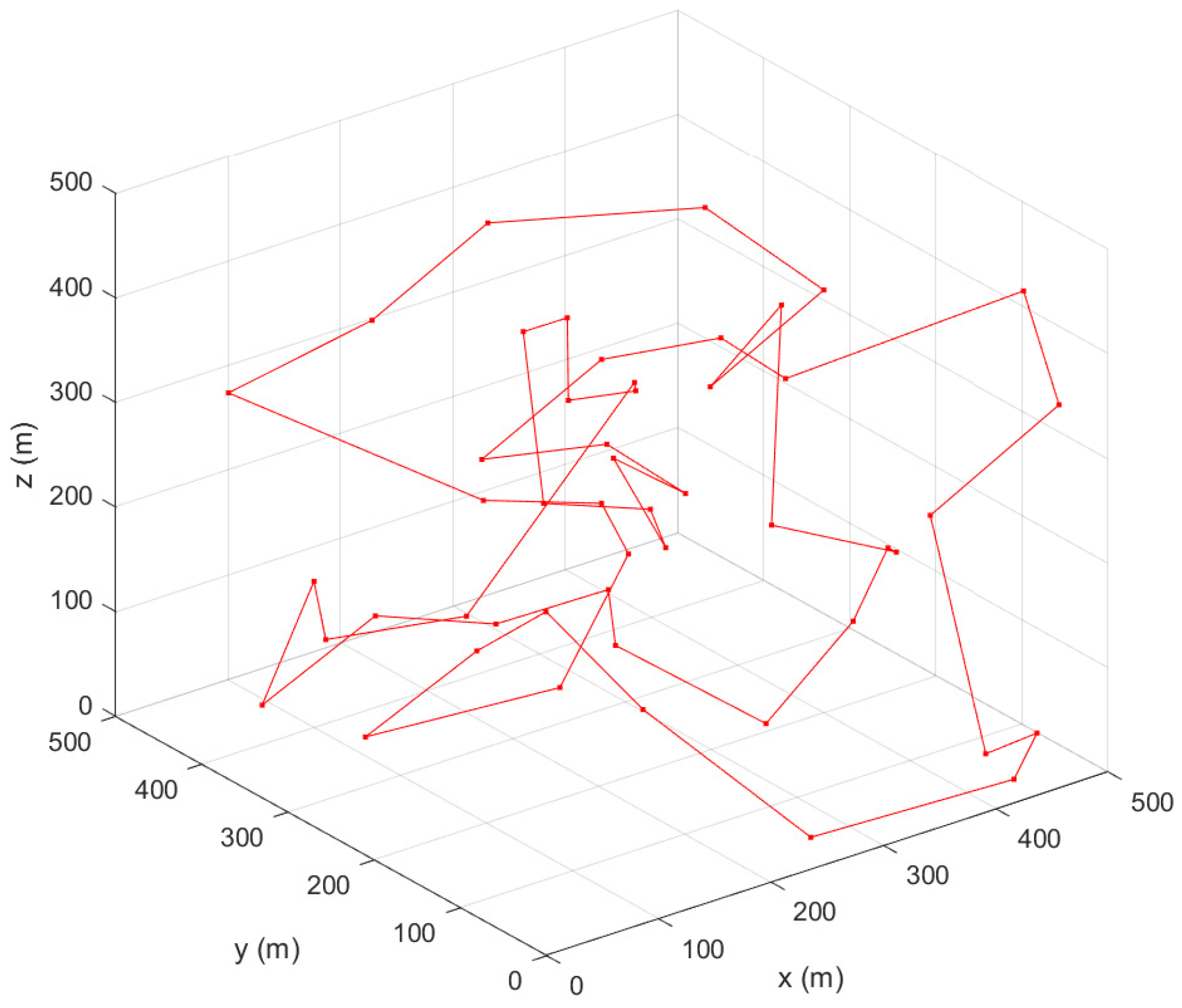
6.1.1. NN-Based Approach
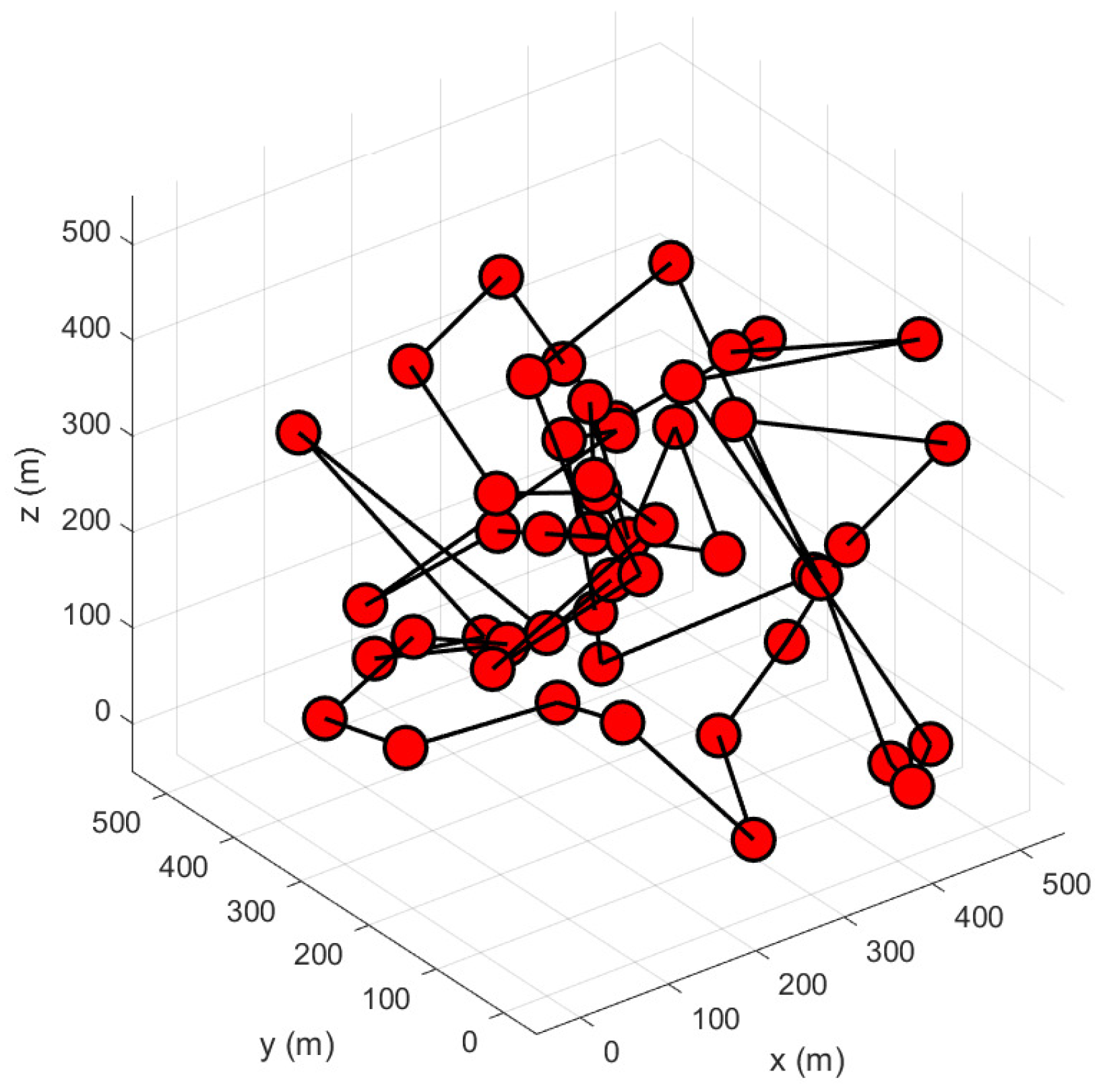
6.1.2. GA-Based Approach
6.1.3. GWO-Based Approach
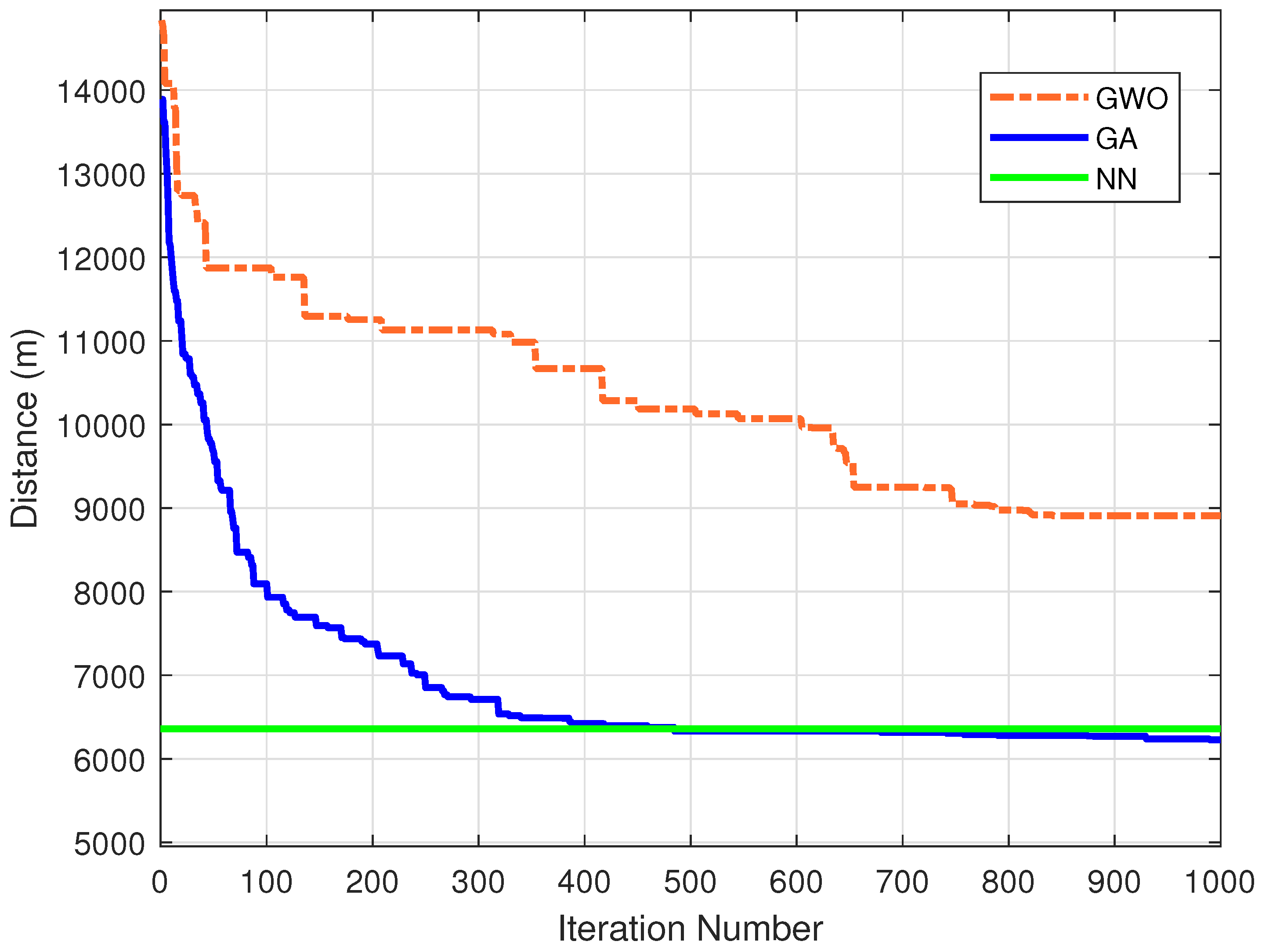
6.1.4. Comparison and Discussion
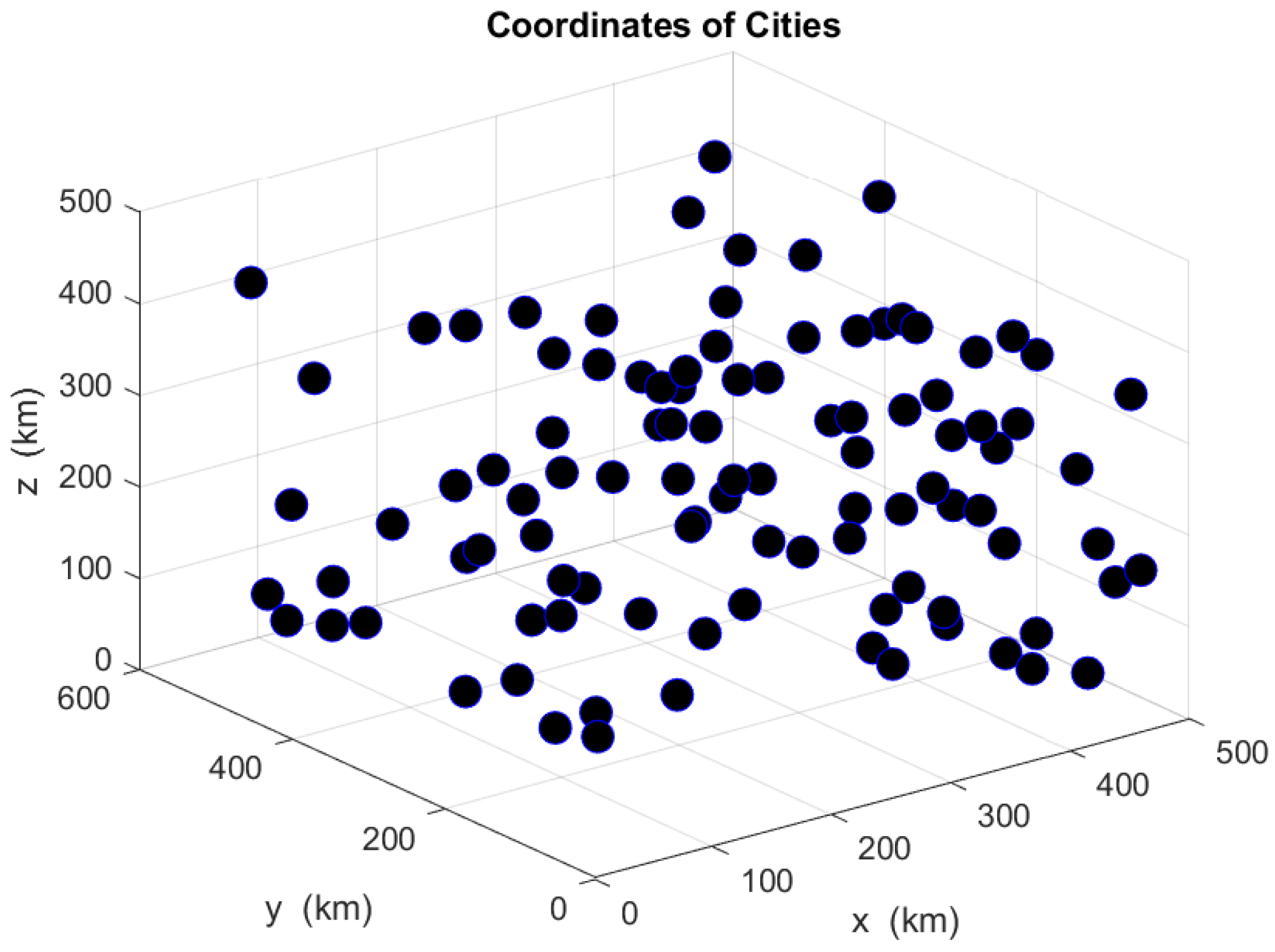
6.2. A 100-Node Scenario
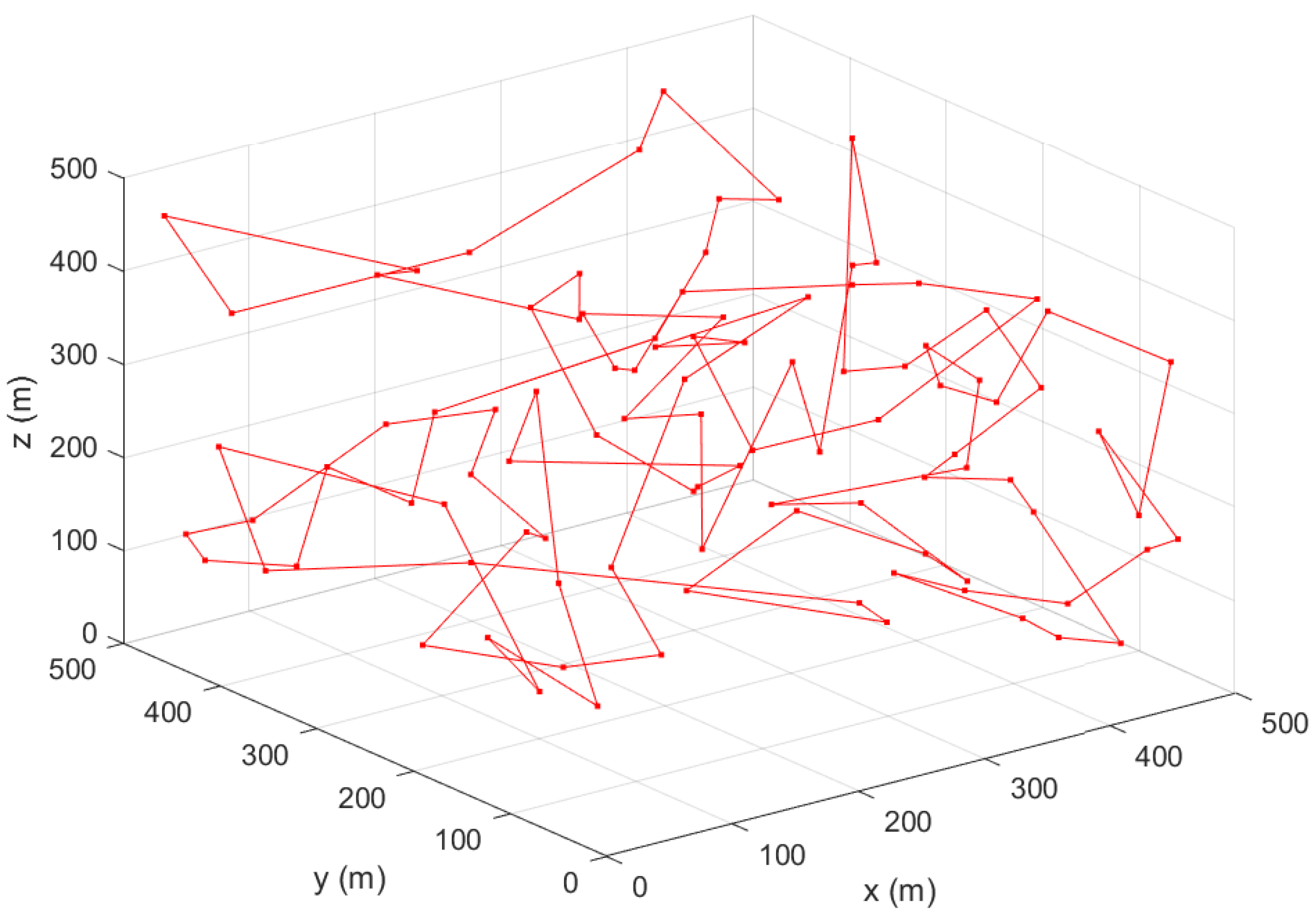
6.2.1. NN-Based Approach
6.2.2. GA-Based Approach
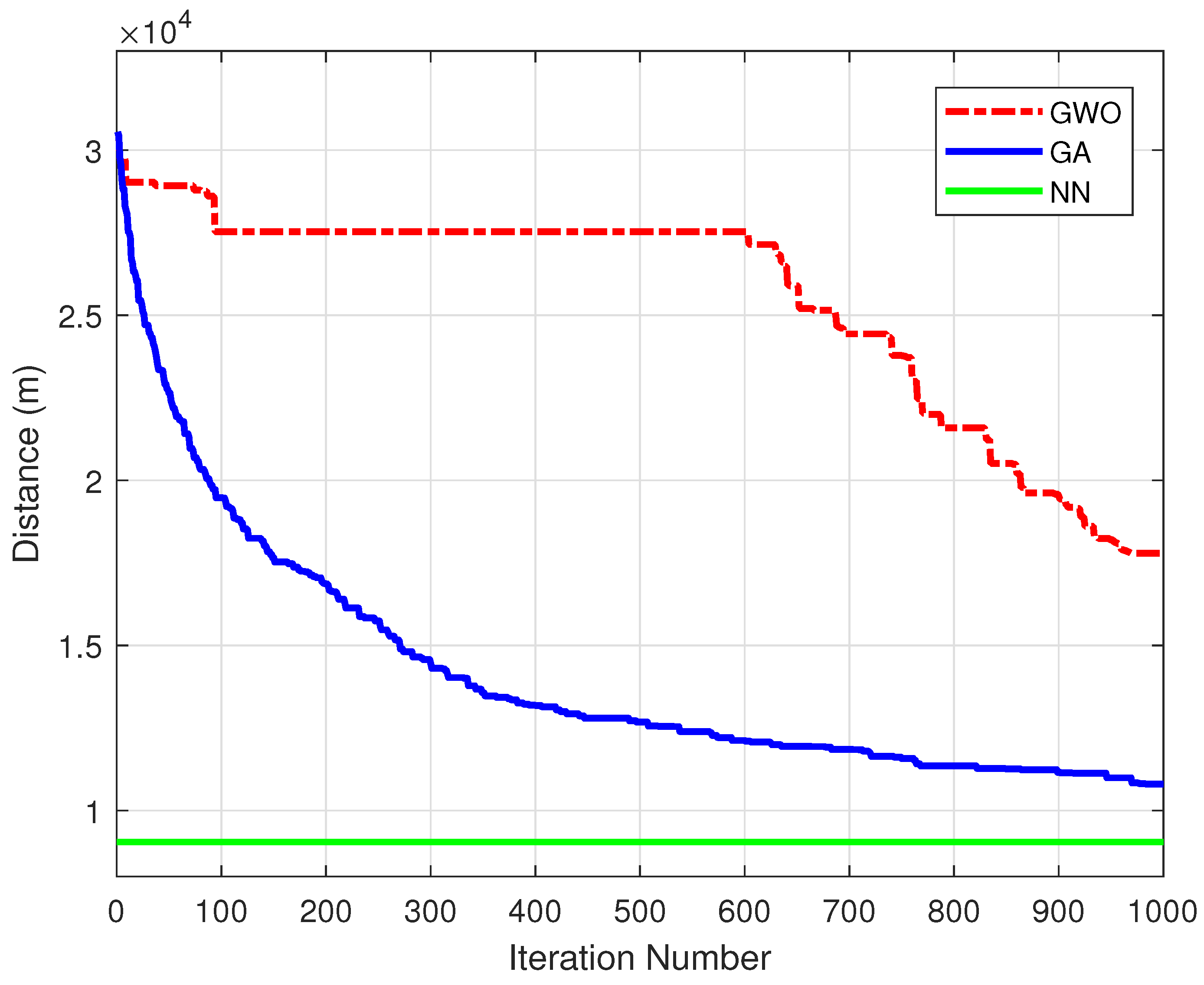
6.2.3. GWO-Based Approach
6.2.4. Comparison and Discussion
6.3. Obstacle Avoidance in 50-Node Scenario and 100-Node Scenario
6.3.1. Obstacle-Avoided Nearest Neighbour (OANN)-Based Approach
6.3.2. Comparison and Discussion
7. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AGV | Autonomous Ground Vehicle |
| WSN | Wireless Sensor Network |
| IoT | Internet of Things |
| GA | Genetic Algorithm |
| GWO | Grey Wolf Optimizer algorithm |
| NN | Nearest Neighbor algorithm |
| OANN | Obstacle-Avoided Nearest Neighbor algorithm |
References
- Felemban, E.; Shaikh, F.K. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832–896845. [Google Scholar] [CrossRef]
- Raghunathan, V.; Schurgers, C.; Park, S.; Srivastava, M.B. Energy-aware wireless microsensor networks. IEEE Signal Process. Mag. 2002, 19, 40–50. [Google Scholar] [CrossRef]
- Alcaina, J.; Cuenca, Á.; Salt, J.; Zheng, M.; Tomizuka, M. Energy-Efficient Control for an Unmanned Ground Vehicle in a Wireless Sensor Network. J. Sens. 2019, 2019, 7085915. [Google Scholar] [CrossRef]
- Eris, C.; Gul, O.M.; Boluk, P.S. An Energy-Harvesting Aware Cluster Head Selection Policy in Underwater Acoustic Sensor Networks. In Proceedings of the 2023 International Balkan Conference on Communications and Networking, İstanbul, Turkiye, 5–8 June 2023; pp. 1–5. [Google Scholar]
- Eris, C.; Gul, O.M.; Boluk, P.S. A Novel Medium Access Policy based on Reinforcement Learning in Energy-Harvesting Underwater Sensor Networks. Sensors 2024, 24, 1–21. [Google Scholar]
- Eris, C.; Gul, O.M.; Boluk, P.S. A novel reinforcement learning based routing algorithm for energy management in networks. J. Ind. Manag. Optim. 2024, 20, 3678–3696. [Google Scholar] [CrossRef]
- Li, Q.; Du, X. Energy-efficient data compression for underwater wireless sensor networks. IEEE Access 2020, 8, 73395–73406. [Google Scholar]
- Cheng, F.; Wang, J. Energy-efficient routing protocols in underwater wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2014, 16, 277–294. [Google Scholar]
- Khan, A.U.; Somasundaraswaran, K. Wireless charging technologies for underwater sensor networks: A comprehensive review. IEEE Commun. Surv. Tutor. 2018, 20, 674–709. [Google Scholar]
- Pendergast, D.R.; DeMauro, E.P. A rechargeable lithium-ion battery module for underwater use. J. Power Sources 2011, 196, 793–800. [Google Scholar] [CrossRef]
- Blidberg, D.R. The development of autonomous underwater vehicles (AGV); a brief summary. In Proceedings of the IEEE ICRA, Seoul, Republic of Korea, 21–26 May 2001; Volume 4, pp. 122–129. [Google Scholar]
- Ghafoor, H.; Noh, Y. An overview of next-generation underwater target detection and tracking: An integrated underwater architecture. IEEE Access 2019, 7, 98841–98853. [Google Scholar] [CrossRef]
- Xie, L.; Shi, Y. Rechargeable sensor networks with magnetic resonant coupling. Recharg. Sens. Netw. Technol. Theory Appl. Introd. Energy Harvest. Sens. Netw. 2014, 9, 31–68. [Google Scholar]
- Lee, J.; Yun, N. A focus on comparative analysis: Key findings of MAC protocols for underwater acoustic communication according to network topology. In Proceedings of the Multimedia, Computer Graphics and Broadcasting: International Conference, Jeju Island, Republic of Korea, 8–10 December 2011. [Google Scholar]
- Zenia, N.Z.; Aseeri, M. Energy-efficiency and reliability in MAC and routing protocols for underwater wireless sensor network: A survey. J. Netw. Comput. Appl. 2016, 71, 72–85. [Google Scholar] [CrossRef]
- Khan, M.T.R.; Ahmed, S.H. An energy-efficient data collection protocol with AGV path planning in the internet of underwater things. J. Netw. Comput. Appl. 2019, 135, 20–31. [Google Scholar] [CrossRef]
- Su, Y.; Xu, Y. HCAR: A Hybrid-Coding-Aware Routing Protocol for Underwater Acoustic Sensor Networks. IEEE Internet Things J. 2023, 10, 10790–10801. [Google Scholar] [CrossRef]
- Kumar, V.; Sandeep, D. Multi-hop communication based optimal clustering in hexagon and voronoi cell structured WSNs. AEU-Int. J. Electron. Commun. 2018, 93, 305–316. [Google Scholar] [CrossRef]
- Xie, R.; Jia, X. Transmission-efficient clustering method for wireless sensor networks using compressive sensing. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 806–815. [Google Scholar]
- Yadav, S.; Kumar, V. Hybrid compressive sensing enabled energy efficient transmission of multi-hop clustered UWSNs. AEU-Int. J. Electron. Commun. 2019, 110, 152836–152851. [Google Scholar] [CrossRef]
- Sun, Y.; Zheng, M.; Han, X.; Li, S.; Yin, J. Adaptive clustering routing protocol for underwater sensor networks. Ad Hoc Netw. 2022, 136, 102953–102965. [Google Scholar] [CrossRef]
- Fan, R.; Jin, Z. A time-varying acoustic channel-aware topology control mechanism for cooperative underwater sonar detection network. Ad Hoc Netw. 2023, 149, 103228. [Google Scholar] [CrossRef]
- Liu, C.F.; Zhao, Z. A distributed node deployment algorithm for underwater wireless sensor networks based on virtual forces. J. Syst. Archit. 2019, 97, 9–19. [Google Scholar] [CrossRef]
- Wei, L.; Han, J. Topology Control Algorithm of Underwater Sensor Network Based on Potential-Game and Optimal Rigid Sub-Graph. IEEE Access 2020, 8, 177481–177494. [Google Scholar] [CrossRef]
- Zhu, R.; Boukerche, A. A trust management-based secure routing protocol with AGV-aided path repairing for Underwater Acoustic Sensor Networks. Ad Hoc Netw. 2023, 149, 103212–103225. [Google Scholar] [CrossRef]
- Yan, Z.; Li, Y. Data collection optimization of ocean observation network based on AGV path planning and communication. Ocean Eng. 2023, 282, 114912–114927. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, X. Research on phase combination and signal timing based on improved K-medoids algorithm for intersection signal control. Wirel. Commun. Mob. Comput. 2020, 2020, 3240675. [Google Scholar] [CrossRef]
- Yan, J.; Yang, X. Energy-efficient data collection over AUV-assisted underwater acoustic sensor network. IEEE Syst. J. 2018, 12, 3519–3530. [Google Scholar] [CrossRef]
- Kan, T.; Mai, R. Design and analysis of a Three-Phase wireless charging system for lightweight autonomous underwater vehicles. IEEE Trans. Power Electron. 2018, 33, 6622–6632. [Google Scholar] [CrossRef]
- Ramos, A.G.; García-Garrido, V.J. Lagrangian coherent structure assisted path planning for transoceanic autonomous underwater vehicle missions. Sci. Rep. 2018, 8, 4575. [Google Scholar] [CrossRef]
- Cheng, C.; Sha, Q. Path planning and obstacle avoidance for AGV: A review. Ocean Eng. 2021, 235, 109355–109368. [Google Scholar] [CrossRef]
- Kumar, S.V.; Jayaparvathy, R. Efficient path planning of AGVs for container ship oil spill detection in coastal areas. Ocean Eng. 2020, 217, 107932–107945. [Google Scholar] [CrossRef]
- Golen, E.; Mishra, F. An underwater sensor allocation scheme for a range dependent environment. Comput. Netw. 2010, 54, 404–415. [Google Scholar] [CrossRef]
- Yi, Y.; Yang, G.S. Energy balancing and path plan strategy for rechargeable underwater sensor network. In Proceedings of the 2022-4th International Conference on Advances in Computer Technology, Suzhou, China, 22–24 April 2022. [Google Scholar]
- Cui, Y.; Zhu, P.; Lei, G.; Chen, P.; Yang, G. Energy-Efficient Multiple Autonomous Underwater Vehicle Path Planning Scheme in Underwater Sensor Networks. Electronics 2023, 12, 3321. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Liu, C.; Zhang, Z. Energy efficient path planning for autonomous ground vehicles with ackermann steering. Robot. Auton. Syst. 2023, 162, 104366. [Google Scholar] [CrossRef]
- Gul, O.M.; Acarer, T. Robust and Energy-Aware Path Planning by Autonomous Underwater Vehicle in Underwater Wireless Sensor Networks for Monitoring Maritime Transportation. EMO Sci. J. 2024, 14, 71–85. [Google Scholar]
- Gul, O.M. A Novel Energy-Aware Path Planning by Autonomous Underwater Vehicle in Underwater Wireless Sensor Networks. Turk. J. Marit. Mar. Sci. 2024, 10, 1–14. [Google Scholar]
- Pop, P.C.; Cosma, O.; Sabo, C.; Sitar, C.P. A comprehensive survey on the generalized traveling salesman problem. Eur. J. Oper. Res. 2024, 314, 819–835. [Google Scholar] [CrossRef]
- Davendra, D. Travelling Salesman Problem, Theory and Applications; InTech: Houston TX, USA, 2010. [Google Scholar]
- Johnson, D.S.; McGeoch, L.A. The Traveling Salesman Problem: A Case Study, Local Search in Combinatorial Optimization; John Wiley & Sons: Hoboken, NJ, USA, 1997; pp. 215–310. [Google Scholar]
- Gutin, G.; Punnen, A. (Eds.) The Traveling Salesman Problem and Its Variations; Combinatorial Optimization; Kluwer: Dordrecht, The Netherlands, 2002; Volume 12. [Google Scholar]
- Hoffman, K.L.; Padberg, M. Traveling salesman problem. In Encyclopedia of Operations Research and Management Science; Gass, S.I., Harris, C.M., Eds.; Springer: New York, NY, USA, 2001. [Google Scholar]
- Gutin, G.; Yeo, A.; Zverovitch, A. Exponential Neighborhoods and Domination Analysis for the TSP. In The Traveling Salesman Problem and Its Variations; Gutin, G., Punnen, A.P., Eds.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning; Addison-Wesley Longman Publishing Co., Inc.: Upper Saddle River, NJ, USA, 1989. [Google Scholar]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Swarm Intelligence: From Natural to Artificial Systems (No. 1); Oxford University Press: Oxford, UK, 1999. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iter. | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | 1000 |
|---|---|---|---|---|---|---|---|---|---|---|
| GWO | 11,874 | 11,254 | 11,130 | 10,669 | 10,186 | 9996 | 9251 | 8977 | 8837 | 8837 |
| GA | 8094 | 7374 | 6712 | 6420 | 6330 | 6330 | 6314 | 6279 | 6271 | 6227 |
| NN | 6358 | 6358 | 6358 | 6358 | 6358 | 6358 | 6358 | 6358 | 6358 | 6358 |
| Iter. | 100 | 200 | 300 | 400 | 500 | 600 | 700 | 800 | 900 | 1000 |
|---|---|---|---|---|---|---|---|---|---|---|
| GWO | 27,525 | 27,525 | 27,525 | 27,525 | 27,525 | 27,525 | 24,432 | 21,589 | 19,529 | 17,794 |
| GA | 19,471 | 16,861 | 14,455 | 13,182 | 12,676 | 12,120 | 11,848 | 11,351 | 11,159 | 10,803 |
| NN | 9045 | 9045 | 9045 | 9045 | 9045 | 9045 | 9045 | 9045 | 9045 | 9045 |
| Iteration | Achieved Length |
|---|---|
| NN with 50 nodes | 6358 |
| OANN with 50 nodes | 6492 |
| NN with 100 nodes | 9045 |
| OANN with 100 nodes | 9055 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gul, O.M. Energy-Aware 3D Path Planning by Autonomous Ground Vehicle in Wireless Sensor Networks. World Electr. Veh. J. 2024, 15, 383. https://doi.org/10.3390/wevj15090383
Gul OM. Energy-Aware 3D Path Planning by Autonomous Ground Vehicle in Wireless Sensor Networks. World Electric Vehicle Journal. 2024; 15(9):383. https://doi.org/10.3390/wevj15090383
Chicago/Turabian StyleGul, Omer Melih. 2024. "Energy-Aware 3D Path Planning by Autonomous Ground Vehicle in Wireless Sensor Networks" World Electric Vehicle Journal 15, no. 9: 383. https://doi.org/10.3390/wevj15090383