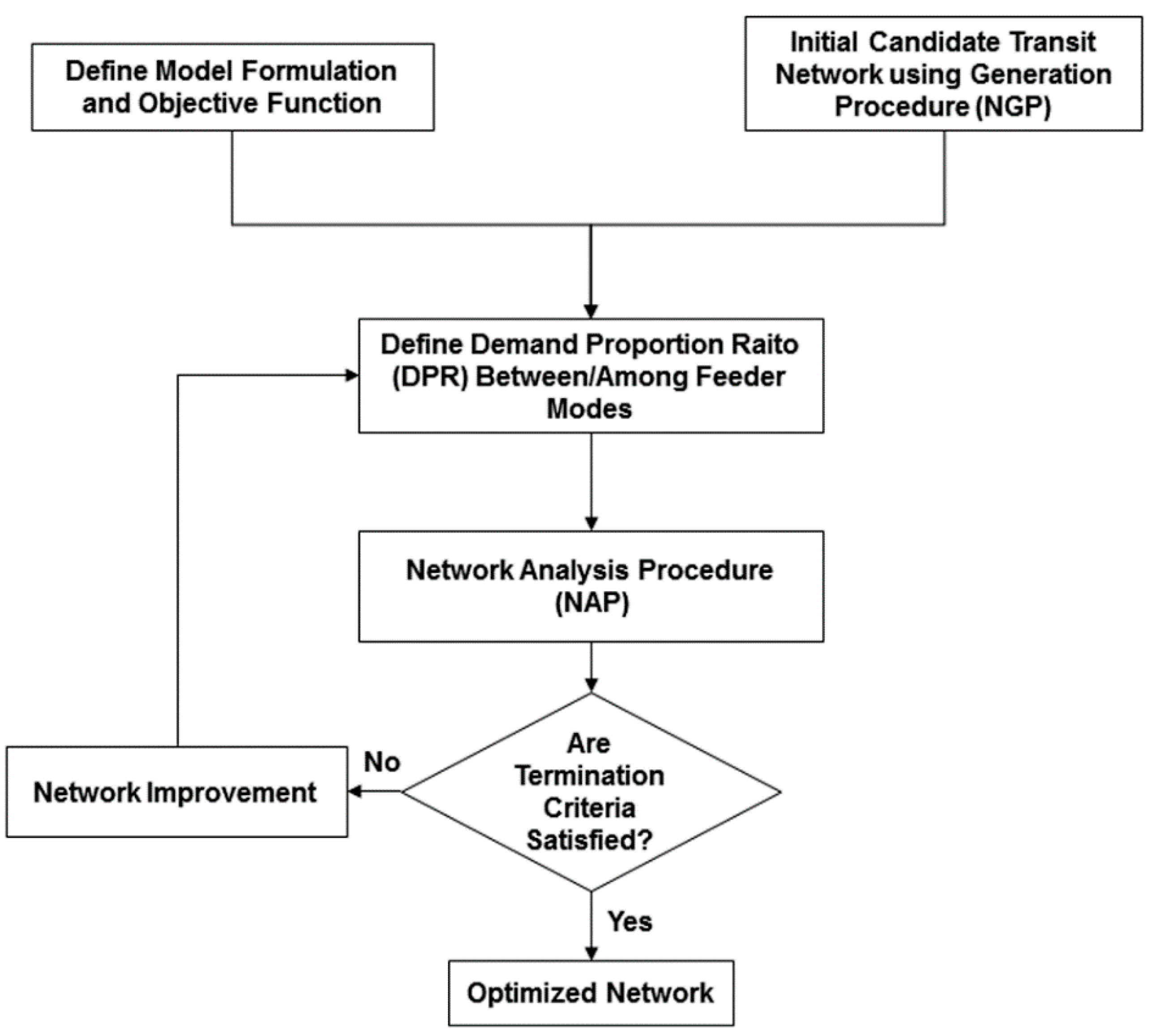
Optimization algorithms: Improvement of the transit network using metaheuristics (e.g., GA and Simulated Annealing (SA)) with respect to the single and multi-objective optimization approaches.
The aforementioned steps are iterated using the optimization algorithms until the termination criterion is met.
3.1. Defining the Objective Function
The total network cost is considered to be the objective function in this study. The total cost of the intermodal transit model is formulated as follows:
where
CT,
Cu, and
Co represent total cost, user cost, and operator cost, respectively. To present the mode more comprehensively, this research considers more cost terms when formulating user costs and operating costs. User cost is related to travelers and is formulated as the product of passengers’ travel times and user’s value of travel time (i.e., value of time for passenger’s waiting and in-vehicle cost).
The operation cost of feeders or railway system was classified into four parts: in-vehicle cost, maintenance cost, fixed and personnel costs. Personnel cost which includes the drivers and administrative costs is dependent on the fleet size, hourly pay, and insurance rate. These cost data come from Mohaymany and Gholami [
13]. The cost is formulated as the product of the number of feeders and trains per round trip per each unit of time. In support of nomenclature clarity and convenience purposes, all of the parameters and variables of the formulated intermodal transit model are described in
Table 1.
The total network cost of the intermodal transit model includesoperation parameters, user parameters, and decision variables. The objective function is specified as the sum of the operating and user costs, which is presented in the following equation:
Consequently, the mathematical formulation of all cost terms substitution can be presented as given:
which is subject to
Decision variables include two binary variables,
and
, whichrepresent the transit network configuration, as shown in
Table 1. Other decision variables are demand ratio for each feeder stop amongst the feeder modes at stops (
), and feeder frequency of each route in each mode (
).
The first term in Equation (3) is the access cost for multimode transit passengers, which is the production of local demand, with the value of time and accessing time.
The second term that is seen in Equation (3) is user waiting costs, which contains passengers that are waiting for the feeders and trains.
The third term in Equation (3) relates to the operating cost for a rail service, which depends on passenger demand, fleet size of the rail network, and route station distance. The derivation of this cost is indictedin the literature in detail [
10].
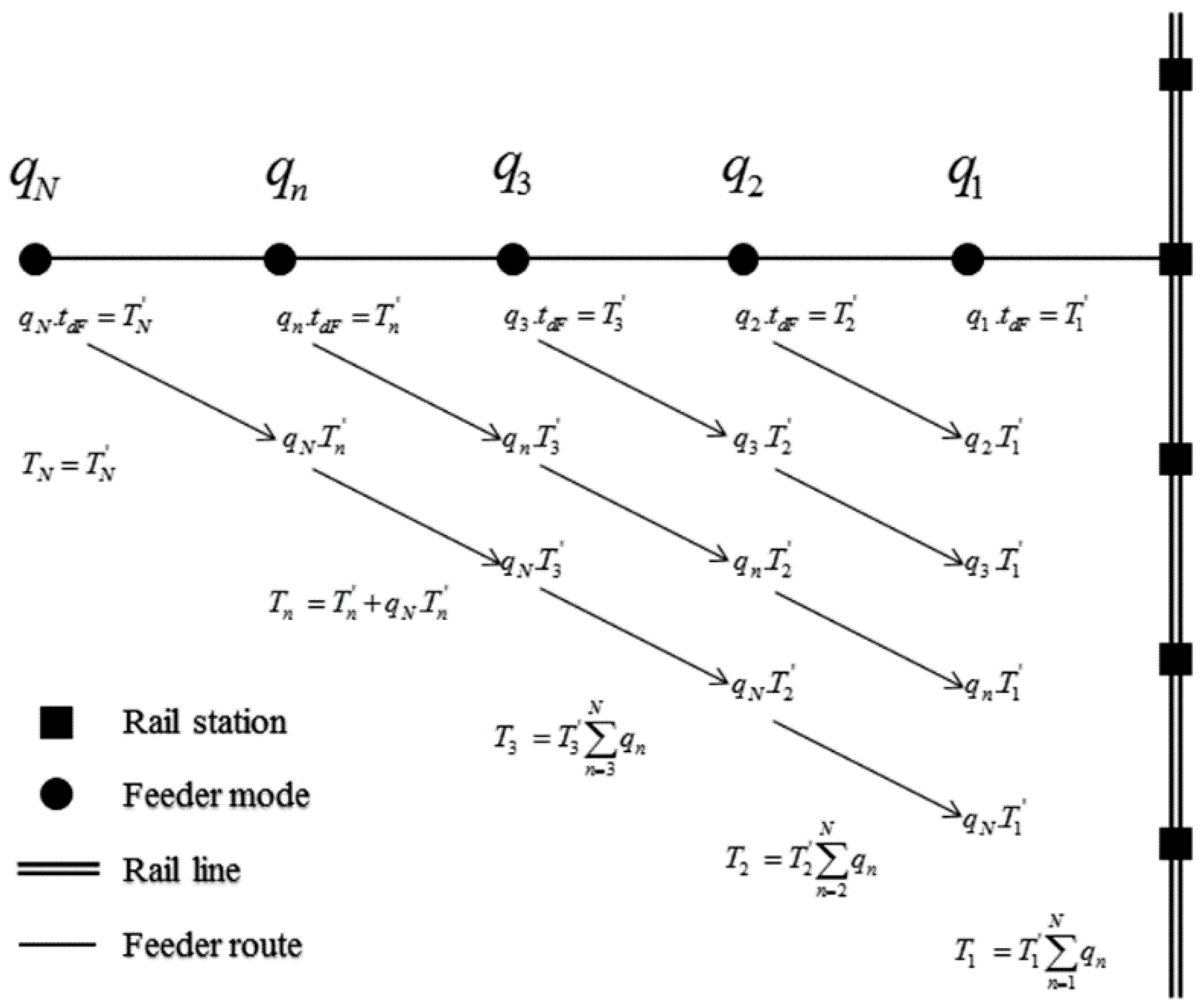
The fourth and fifth terms given in Equation (3) are user in-vehicle costs, which contain in-vehicle time, passenger demand, and the value of user in-vehicle time. This cost, Cui, is formulated based on the average trip time and is determined in two main parts: the user dwell time and the user running time.
Dwell time is the time that a vehicle stays at the bus stop to load/unload other passengers. When considering the variation in time spent, the geometric series equation presentedby Almasi et al. [
10,
11] has been revised in this study.
Figure 3 demonstrates the actual condition for traveler demand and dwell time at each feeder stop along the route,
rth, connected to the rail station.
As shown in
Figure 3, the dwell time distribution depends on demand at each stop along the route.
qn denotes the demand at feeder stop,
nth, in the feeder route.
Tn is user dwell time because of demand,
qn. At feeder stop
n − 1, the boarding and alighting time (
Tn−1) will be imposed to the passenger demand of
nth feeder stop (
qn). Consequently, the dwell time will be increased by increasing passenger demand in consequent feeder stops. Therefore, the dwell user cost of route,
kth, and feeder mode,
mth, is formulated with the summation of dwell time for demand at each feeder stop and unit time value, as follows:
Therefore, formulation of the network dwell cost is obtained as follows:
Similarly, spending dwell time at each rail station is different. Therefore, the number of traveler and dwell cost would be different.
Figure 4 demonstrates the real situation of trip demand at each rail station.
denotes the passenger demand at rail station,
jth, in the rail line.
Tj is user dwell time by demand,
. The boarding and alighting time at station
j − 1 (
Tj−1) will be imposed to the demand of
jth station (
). Consequently, the dwell time will be increased by increasing the demand in consequent rail stations.
for every feeder vehicle is calculated by summation of dwell time for demand at each station and unit time value. Therefore, the train user dwell cost is determined as follows:
Thus, network user dwell cost for trains can be formulated as follows:
Therefore, the dwell user cost for feeders and trains, for each mode,
m, is given as:
The operating costs, formulated as the sum of Coi, Cm, Cp, and Cf, are presented in the sixth to eighth terms of Equation (3). To improve accuracy, the dwell time and feeder-mode slack time are used in this study. The stop delay time incurred at feeder stops, and the running cost for the feeders is defined according to the round trip link time.
The route feasibility in the network design in terms of the constraints for the MFNDP would confirm by Equations (4)–(8). These constraints are used by previousstudies [
9,
14,
15]. Equation (9) represents constraints on the minimum and maximum length of feeder routes. Similarly, limitations for the minimum and maximum frequencies are specified in Equation (10), while Equation (11) shows the maximum allowable number of vehicles in the fleet. Equation (12) presents the restriction for the maximum number of routes in the proposed multimode network.
Equations (9)–(12) represents the constraints on the length of feeder routes, limitations for the frequencies, allowable number of vehicles in the fleet, and the maximum number of routes in the proposed multimode network.
3.2. Network Generation Procedure
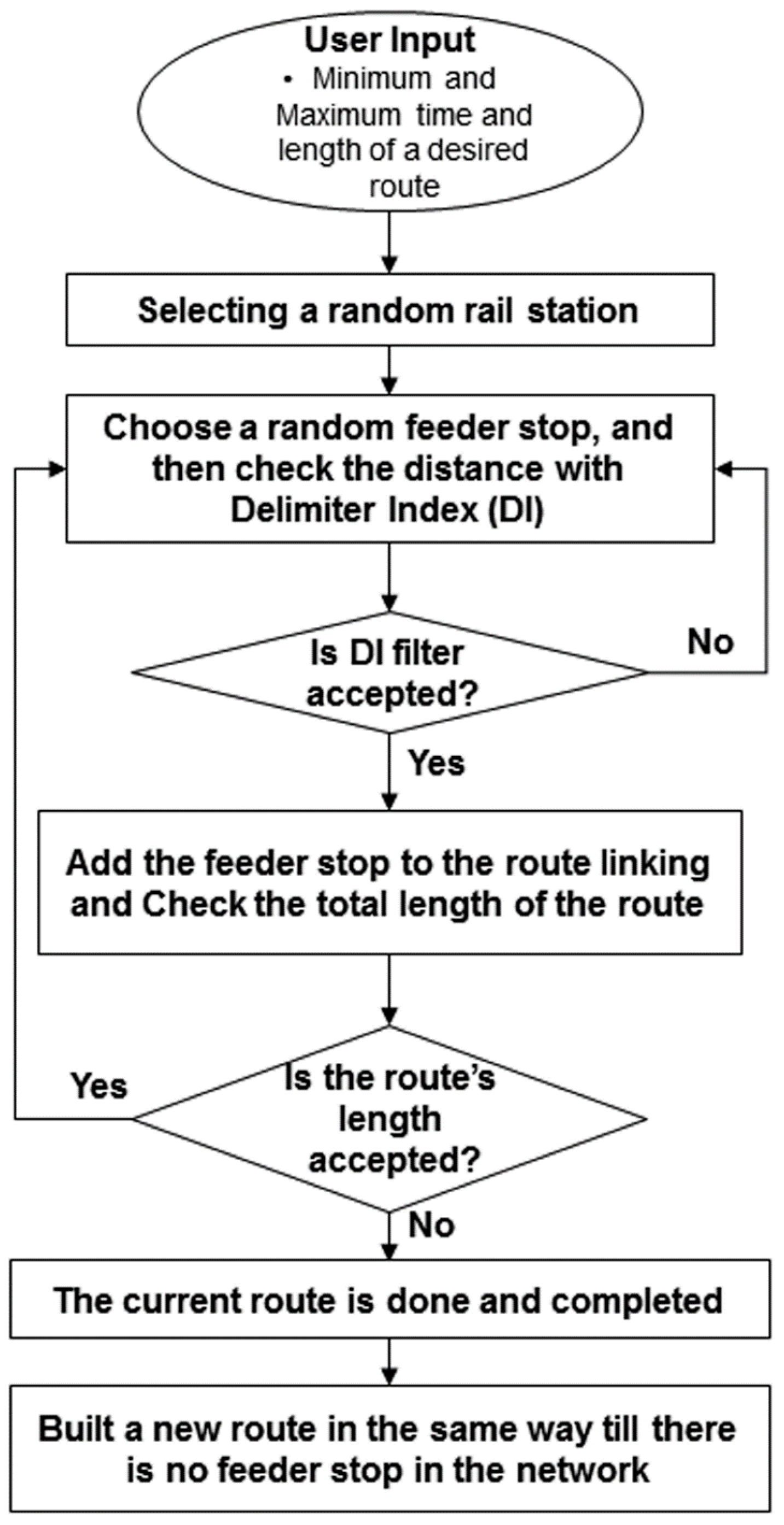
To identify a candidate network, a network generation module is designed. All of the routes are built as described below.
First, a rail station is chosen at random, subsequently, stops, selected at random, are added to the path linking to this rail station. The length of the path is checked after adding each stop. The current path is terminated if it exceeds the maximum length (Lmax) and a new path will be constructed in the same way. The process continues until all the stops have been contained in the network.
Random selection of stops with no restrictions may create a poor initial solution. Thus, the concept of delimiter proposed by Breedam [
16] is developed in this study. The delimiter is applied to both station to the first bus stop, and bus stop to the next bus stop as given below.
- (a)
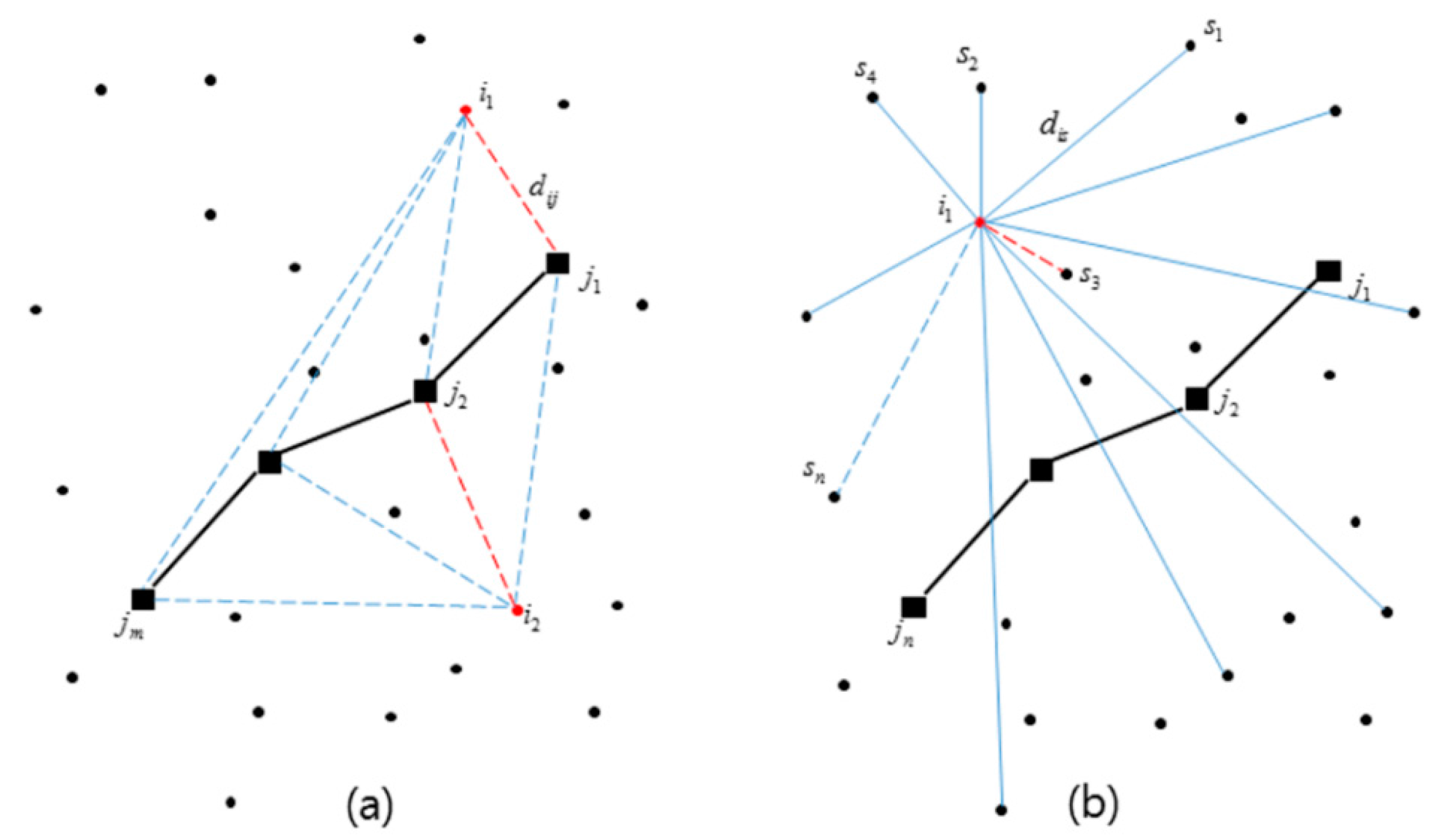
Station to the first bus stop: A selection constraint in terms of the distance among the stations and stops is a delimiter. The delimiter is determined as shown in Equations (18) and (19) below.
For each feeder stop,
ith, define the distance of its nearest rail station,
jth (
), using:
The initial delimiter
DIF is equivalent to the maximum of the set of minimum distances determined as given by (see
Figure 5a):
Therefore, the distance among the selected rail station and bus stops should be less than or equal to DIF, otherwise a new stop will be selected. Similarly, the delimiter will intercept to link a station and a stop that are too far apart.
- (b)
One bus stop to the next bus stop: Similarly, a range delimiter in order to narrow the search distance among the selected random stops and the stops is provided. This range delimiter prevents the selection of a sequence of stops that exceed the allowable distance (see
Figure 5b):
The stop sequence in each route is reordered to reduce the route distance, which in turn, may reduce the total cost. In addition, a flowchart of the initial candidate network using the NGP is presented in
Figure 6.
3.3. Defining Demand Proportion Ratio among/between Modes
Another purpose of the proposed MFNDP is to determine the optimal demand proportion for feeder modes at each stop when considering the minimum total cost in the transit system. Normally, after network optimization, the feeder mode will be decided at each route.
The objective function shows the impact of the demand density at each stop and network configuration on dwell user cost. At each network configuration, the amount of passenger demand at each bus stop highly influences the total cost. Therefore, importance ofthe demand ratio among the feeder modes at each bus stop based on the network configuration is understood.
In the proposed strategy, an optimum demand proportion among the modes at each bus stop has been found. This strategy helps to create a more flexible transit network with any range of demand density. To identify the demand ratio amongst the feeder modes at each bus stop (qim) as decision variables, an inner optimization task has been performed using a metaheuristic approach on the given network.
The network information, total demand at each bus stop, and the design parameters are given as input data. However, DPR at each bus stop are defined as decisions.
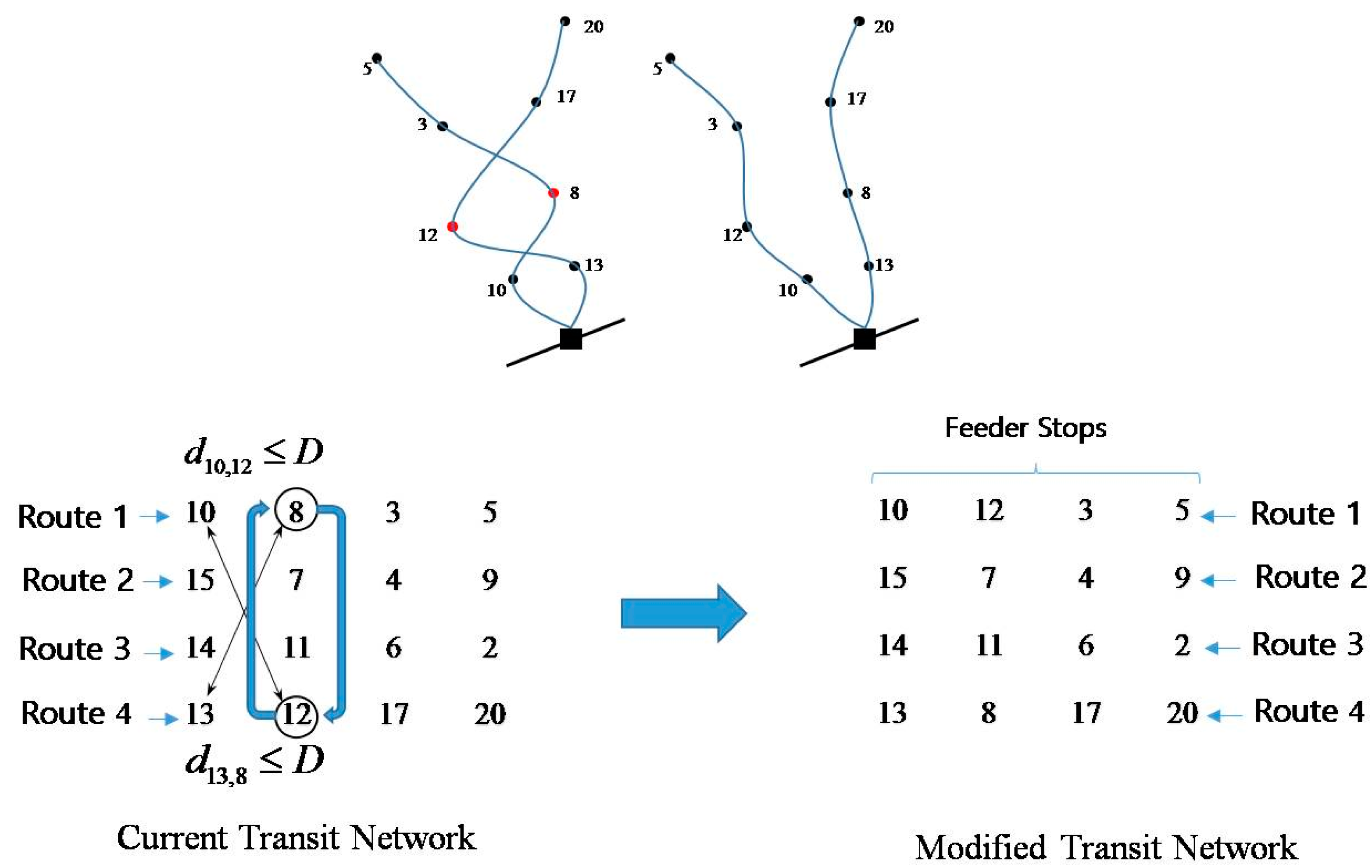
Figure 7 shows an example of the demand proportion ratio and modified routes on a simple network. The input network presents two routes for mode one (
and
) and two routes for mode two (
and
). Metaheuristic approaches determine the optimal demand ratio of the demand at each bus stop. Based on the defined DPR at each bus stop, the network will be modified and cost will be evaluated based on the new proposed transit network (see
Figure 7).
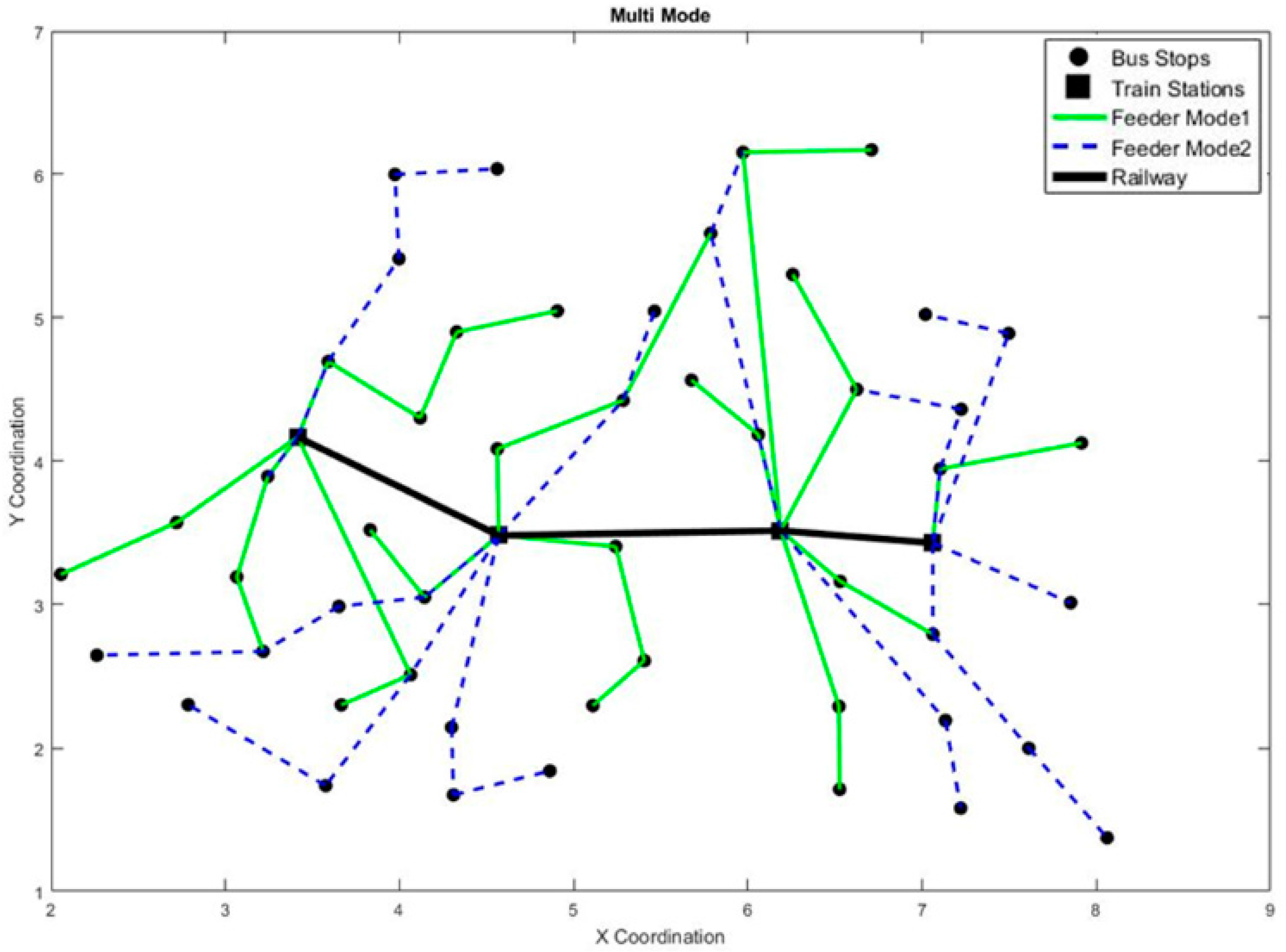
The proposed approach includes
M feeder modes (e.g., bus and van) with different characteristics connected to coordinated mass transit services that will provide a more sustainable flexible network.
Figure 8 illustrates an example of MFNDP after the DPR and modification on the given network. Some stops are served by only one feeder mode, while others are served by both feeder modes that are based on the designated DPR.
3.4. Network Analysis Procedure
A process to analyze, evaluate different network structures, and conclude their associated route service frequencies is described by NAP. Input data for the NAP contains the following items:
- (a)
Transit network information includes the location and the number of the nodes where the trip demand originates and/or heads on the routes that are connected with each node through connectors. The proposed solution network can be generated using a heuristic process (NGP) or using metaheuristic optimizers.
- (b)
Demand data, which includes a demand matrix expressing the number of travelers that are using transit and DPR between/among feeder modes at each bus stop.
- (c)
Design parameters that refer to some parameters that are identified by the plannerssuch as load factor at each route, the feeder capacity, the maximum number of bus routes, cost parameters, and so forth.
Once a specific transit network is proposed by NGP or network improvement, NAP is utilized to evaluate the different network and calculate route frequencies. NAP procedure can be illustrated as follows.
First, a trip assignment is employed to assign the trip demand to specified routes associated through the presented multimodal transit network configuration. Then,
Fk for each route is calculated using the frequency setting procedure. The optimum
Fk isrelated to the transit network configuration. The analytical approach is used to determine the optimum
Fk by setting the first derivative of the cost function with respect to the feeder mode frequency, equating it to zero, and solving it. Thus, the optimal feeder frequency can be formulated as follows:
Moreover, the minimum required frequency for route,
kth, is taken as follows:
The given frequency for route,
kth, is acquired by choosing the maximum value of
Freq,K and
Fopt,K as shown in Equation (24):
Then, the output data show the optimal transit network design, service frequencies, and demand information, with an extensive variety of performance measures.
Figure 9 gives the flowchart for NAP.
3.5. Improvement Strategy
In this research, we have applied several operators in order to modify/change/amend a multimodal transit network, as given in the following sections. Also, a criterion for choosing the neighborhood has been suggested.
3.5.1. Delimiter Value
Usually, the stops required to perform the move are selected at random. In this case, because of the large search space, a number of bad move selections can be involved.
In order to narrow the search space and make the process more intelligent, a criterion, called the range delimiter, has been proposed to prevent the selection of too many bad moves (Breedam 2001). The concept of delimiter value is similar to the generation of an initial solution described in the previous Section.
The range of delimiter is equal to the travel distance limitation between nodes of the different routes selected at random for the move. This travel distance limitation is calculated for each solution network with k routes (R1, R2, …, Rk), as given in Equation (25) below.
First, wecalculated the distance (i.e., Euclidian distance) between stop,
ith, in route,
Rk, and its nearest neighboring stop,
jth, belonging to another route,
Rm:
Therefore, the distance between the stops of two different routes selected at random for the exchange move must be less than the delimiter value (D), so that in this case there is a higher potential for generating a move that will improve the quality of the neighborhood solution. Hence, to prevent bad moves by choosing far distance stops, the delimiter value strategy has been carried out for every proposed operator.
3.5.2. Defining Neighborhood Moves
Number of solutions defines by the neighborhood structure that can be achieved in one single or multiple move(s) from a current solution. These types of moves are aimed at improving a feasible solution by moving feeder stops within or between/among routes. The purpose is to rearrange the feeder stop sequence in every single route and transit network to reduce the total cost.
Five types of moves are considered in this paper. They are the swap operator, insertion operator, single-point crossover operator, uniform crossover operator, and mixed operator.
Figure 10 shows an example of each of first four operators. Mixed operator is a combination of those four operators. All of the operators are applied only for feeder stops and we assumed that for a candidate transit network rail stations are fixed. The details of operators used are represented below.
Swap operator:The swap operator exchanges the positions of two feeder stops from two different routes in a particular column. However, in this paper, the swap operator used is equal to the maximum number of stops in a route in a given MFNDP. In fact, for each column of a transit network, one single swap operator is utilized.
It is worth mentioning that the choice of stops for a swap operator is performed using the strategy given in the section of delimiter value for both previous and selected feeder stops. If the distance between a selected stop and the previous feeder stop is equal to or smaller than the
D, then the swap operator can be appliedfor that particular column. Hence, the feeder stops are chosen at random, while their new positions depend on the delimiter criterion. This concept is applied to all of the operators that are considered in this paper.
Figure 11 demonstrates an accepted move using the swap operator.
Insertion operator: The insertion operator tries to improve the transit network by removing a stop from a route and inserting it into another route in a particular column. There is difference between the swap and insertion operators. In the insertion operator, a stop is removed from a route and is added to another route, while in the swap operator, stops are exchanged. Similar to the swap operator, the insertion operator obeys the concept of delimiter value for both stops and rail stations (see
Figure 12). If the delimiter condition is satisfied, then the insertion operator is allowed to be applied.
Swap operator is applied equal to the maximum number of stops in a route in a given MFNDP. As MFNDP aims to minimize the total cost, while satisfying network constraints, a candidate transit network with a large number of routes may not provide an appropriate transit network.
Figure 10b depicts the application and usefulness of this operator in practice.
Single-point crossover operator: By selecting two random routes, a single cut (point) is randomly chosen. After selecting two routes and a single cut number, if the delimiter value (
D) condition allows, two strings of stops can be exchanged at a given cut number. The delimiter criterion should be checked for both stops, locating as first stop in strings to be allowed for exchange purpose.
Figure 13 depicts a successful exchange using the single-point crossover over two different routes. Furthermore, a schematic view of this operator is shown in
Figure 10c.
Uniform crossover operator: For the uniform crossover operator, as for the single-point crossover, two random routes from the transit network are selected. Then, between two selected routes, the route with a minimum number of stops is taken as the reference route, and the other one is called the subject route. Based on the basic concept of uniform crossover, a random binary vector is generated as a decision vector in which 1 means ‘exchange’ and 0 means ‘do not exchange’.
Based on the binary decision vector, the reference and subject routes collaborate with each other. An example of this operator is given in practice, as shown in
Figure 10d.
Figure 14 illustrates the process of this useful operator.
Mixed Operator: The mixed operator is a combination of the swap, insertion, single-point, and uniform operators in one single update for the transit network. In fact, using the mixed operator, all the good chances gather in one place; however, using this operator too many times may increase the chance of getting stuck in local optima. In applying the aforementioned operators, we have used unbiased selection and equal chance for each operator. Next, brief and concise explanations of the applied optimizers are provided.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}