Due to the increasing quantity of produced consumer goods and machines accessories, the necessity for sustainable logistics networks to recycle used products proves imminent. However, the expansion of cities has driven urban population to spread to remote areas, thereby imposing long distance transport to logistics companies. These requirements generally lead to significant expenses, and are sometimes the cause of poor management of wastes and used products within cities. In order to resolve these managerial problems, this paper introduces collaboration among retail stores and recycling hubs, not only to improve their coverage of the entire network, but also to yield profits from a more organized network.
4.3. Model Formulation
To simultaneously evaluate the influence of collaboration on the reverse logistics operations costs and the number of vehicle used for services, the proposed TERLN optimization is based on a bi-objective mixed-integer linear mathematical model. The objective functions and the constraints are presented as below.
The first objective function
TC is designed to minimize the total cost of the entire TERLN.
The second objective function
MNV aims to minimize the number of vehicles used at the second echelon of the network for collection purpose.
represents the transportation cost and maintenance cost of the vehicles which collects from different customers to RH or RS.
represents the transportation cost and maintenance cost of the semitrailers which serve for collection operations from RS to the RH.
represents the fixed costs, variable costs, and discounts offered by the cooperative alliance to RH and RS.
In the proposed model, Equation (1) presents the cost minimization objective function of the TERLN, including transportation costs, vehicle and semitrailers truck maintenance costs, logistics facilities’ fixed costs, variable costs and the discount after joining the alliance. Equation (2) is the minimum number of vehicles objective function which combines both collaborative and non-collaborative networks’ number of vehicles. This approach is used to introduce facilities’ vehicle sharing advantages since customers of the same coalition’s recycling facilities can be served by any of them. Equations (3)–(5) express the different costs taken into account for the TERLN optimization. Constraints (6) and (7) respectively ensure that each customer is assigned to only one RH or RS and the latter is served by one RH. Constraints (8) and (9) assure that each vehicle visits a customer node not more than once. Constraints (10) and (11) are designed to indicate that after completing their assigned services, vehicles’ routes cannot terminate at a customer node, and a semitrailer cannot stay at a retail store after loading. Constraints (12) and (13) guarantee that the total amount of collected products does not exceed the capacity of the vehicle and semitrailer. Constraints (14)–(17) are enforced to eliminate sub-tours in the entire network. Constraints (18)–(20) express the binary variables used in the mathematical model of the investigated TERLN optimization problem.
4.4. Routing Optimization with the CW_NSGA-II Hybrid Algorithm
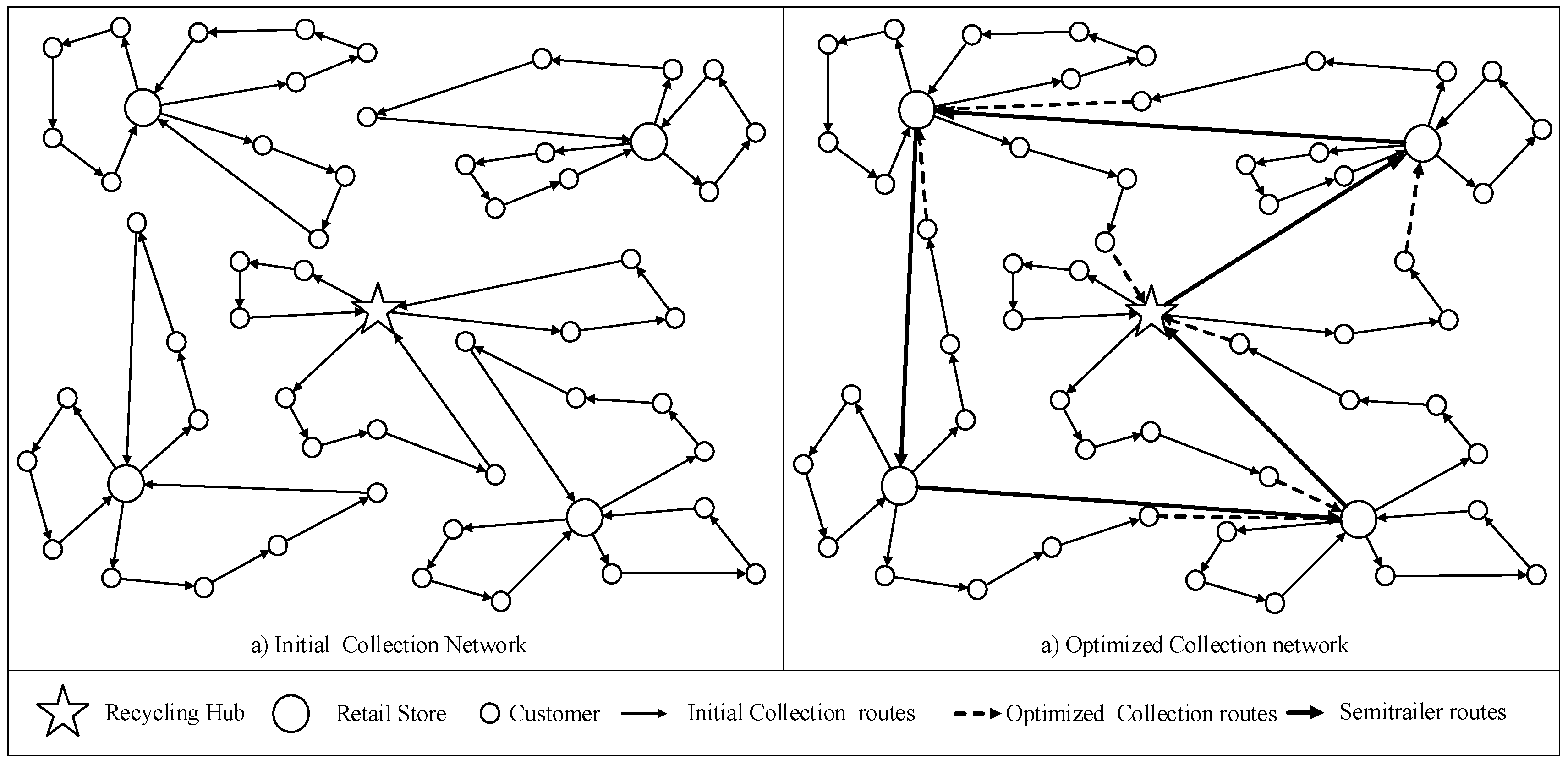
According to the problem statement, the proposed 2E-CRLN is a cooperative network where vehicles are not required to return to their origin as long as the latter collaborates with another facility closer to the last visited customer. Therefore, the optimal solution to the problem should consider the distance between the last customer on vehicle v’s route and the retail stores as well as the recycling hub in the same alliance.
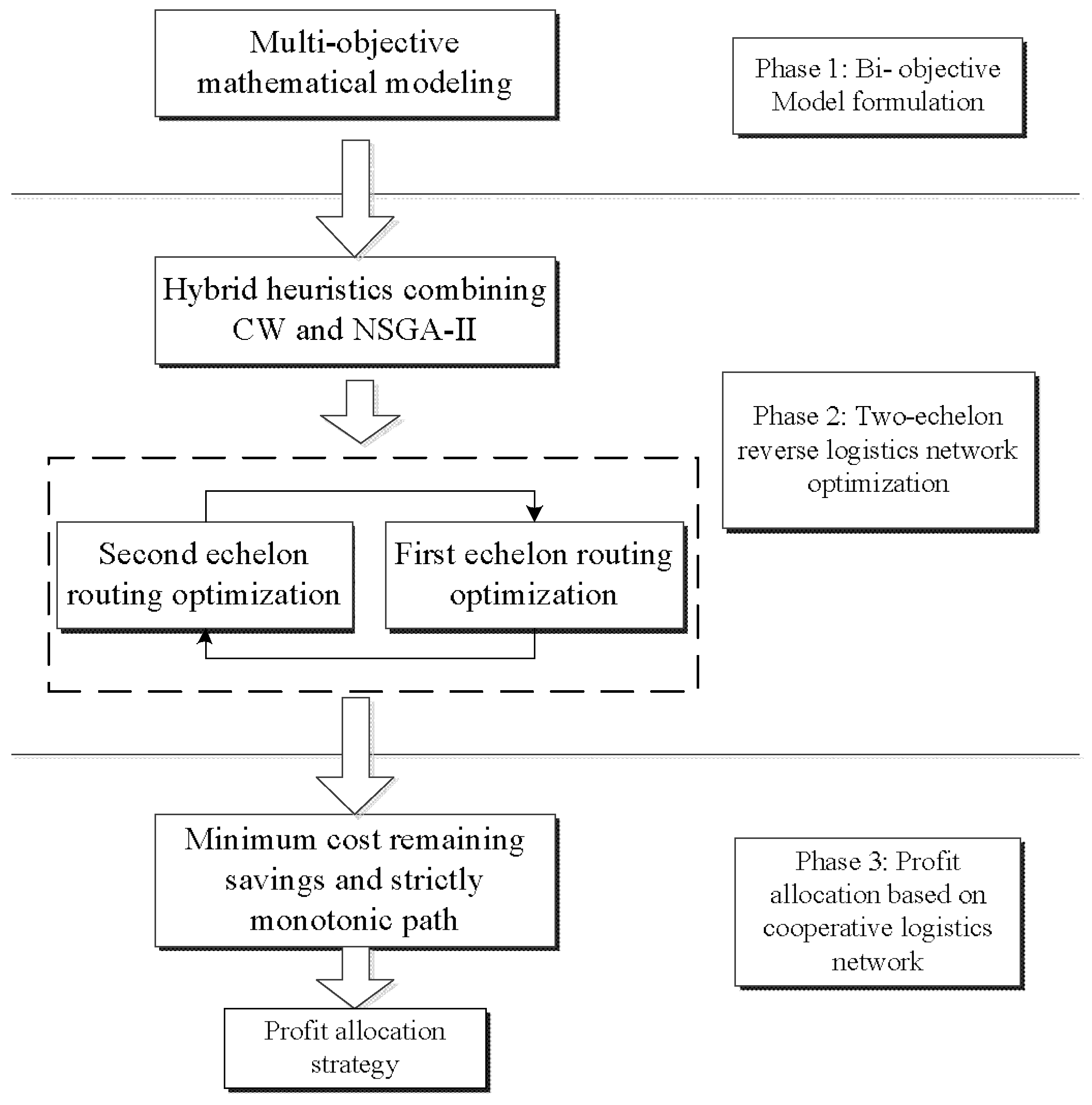
Taking into account this possibility, a solution methodology for the multi-echelon vehicle routing optimization is developed by combining Clarke–Wright savings algorithm and NSGA-II algorithm into a hybrid heuristic algorithm called CW_NSGA-II. CW savings method is proposed by Clarke and Wright [
45] to generate routes for a central depot to serve multiple customers and select those offering the maximum distance savings as best solutions. More recently, Segerstedt [
46] proposed a variant of the CW method to particularly address vehicle routing problems. The non-dominated sorting algorithm-II (NSGA-II) proposed by Deb et al. [
47] is an extension of the genetic algorithm. NSGA-II is a population based heuristic algorithm typically used to solve multi-objective problems, and well-known for its capability to offer high accuracy solution [
48]. Therefore, the combination of these two algorithms can not only properly address our proposed bi-objective model, but can also enhance the accuracy of our routing solutions. In existing articles, CW had already been combined with other algorithms in order to obtain better results. For instance, Li et al. [
5] implemented a modified version of the Clarke–Wright saving with a local search phase to study the roll-on-roll-off vehicle routing problem and confirmed the method’s relevance for waste materials logistics.
In line with studies on the usefulness of CW savings algorithm, CW_NSGA-II hybridizes these algorithms and employs CW for the generation of the initial population. As a result, the quality of initial solutions can be guaranteed and the offspring population can be generated based on good parents. The entire optimization process is design on the basic framework of the non-dominated sorting algorithm-II, and the Clarke–Wright savings algorithm is only integrated during initialization. The major steps of CW_NSGA-II are as below.
Step 1: Load the data file corresponding to the investigated network, and initialize parameters related to the algorithm such as: the population size (Ps), number of generations of the offspring population (NoG), number of objective functions (NoF), number of runs (NoR), crossover and mutation indexes (CI and MI).
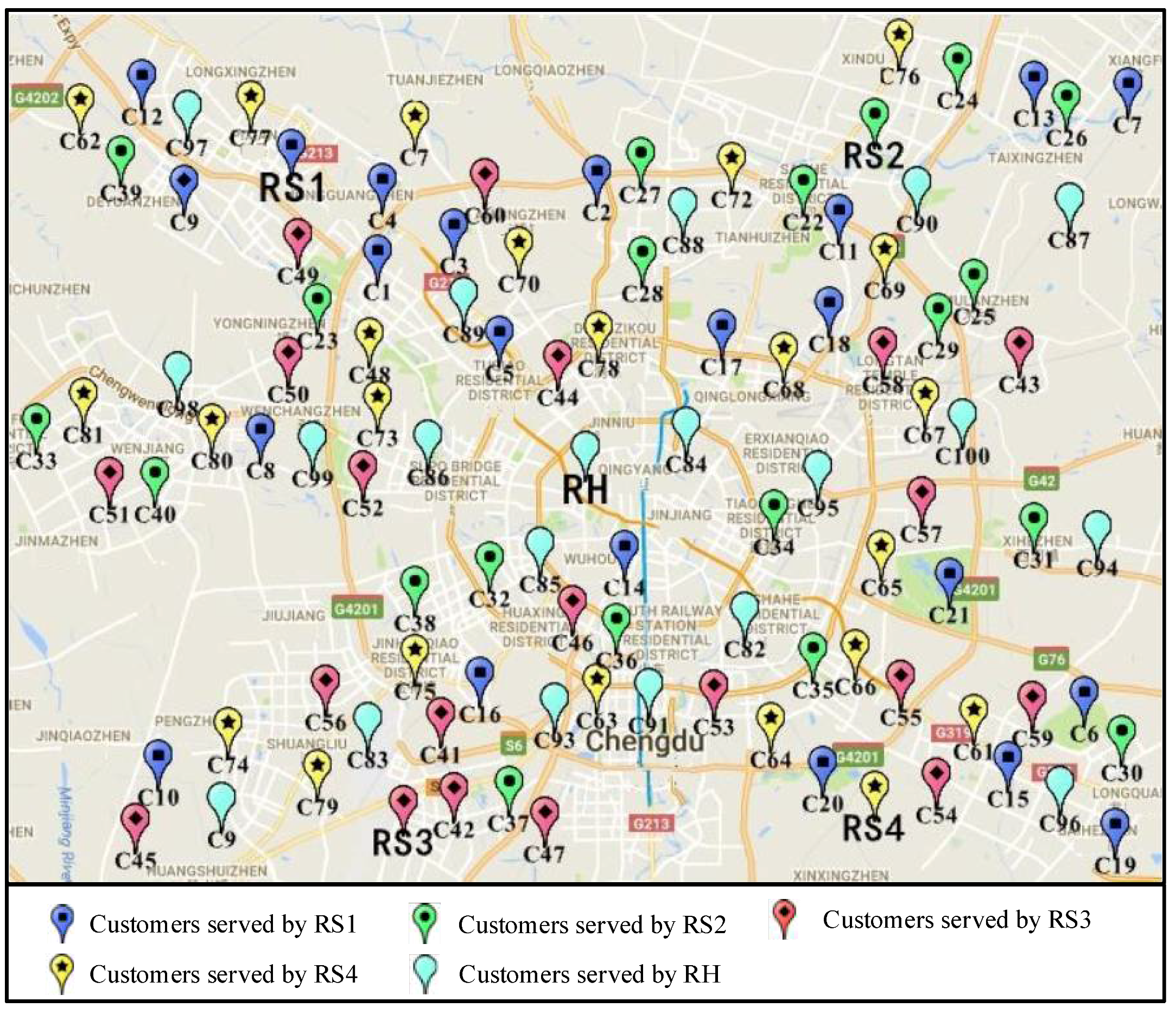
Step 2: Conduct the collaborative network’s segmentation using k-means clustering algorithm. The clustering criterion consists in the Euclidean distance between customers. Therefore, the operation can be completed using k-means packages existing on MATLAB, SPSS, or any other computation software. After generated clusters are stable, distances between final clusters centers and logistics facilities are calculated. Customers are assigned to a facility when the latter is the closest to the corresponding cluster’s center.
Step 3: From this phase, the remaining part of CW_NSGA-II procedure is implemented for each run, and the highest ranked solutions are compared after NoR runs to maintain the best one. First, initialize the chromosome population by applying CW, and randomly generate Ps-1 strings to form a population of size Ps by adding CW best solution.
Step 4: Evaluate each string in the population matrix with the proposed TERLN optimization’s objective functions. Since NSGA-II is a typical multi-objective optimization algorithm, there is no need to transform the model into a single objective formulation; therefore, for each string, CW_NSGA-II will output the corresponding cost and the number of vehicles.
Step 5: For each generation of the offspring population, proceed with Steps 5.1–5.3.
Step 5.1: Randomly select two parent strings and genetically operate on them to generate two offspring solutions. For this purpose, the partial mapped crossover and the swap mutation operators are used. Further combine the offspring and parent population in order to evaluate their suitability as solutions of the optimization model.
Step 5.2: Compare the objective functions values for each string and sort them in order of dominance. In other words, check the dominance of each string over its peers and position the non-dominated one on top.
Step 5.3: Set the first Ps strings as the non-dominated front and record their values as the best of the corresponding NoG value. Move to Step 4.1 to generate the new offspring.
Step 6: Output the highest ranked string as the best solution of the run, and move the next run.
The representation of optimization solutions and the procedure of the CW algorithm are introduced in the following sub-sections.
4.4.1. TERLN Optimization Solution Representation
The proposed TERLN optimization procedure consists in separately solving the problem at each echelon and finally combining them for the global solution’s fitness evaluation. The first echelon’s solutions are encoded with values corresponding to RH and RS, whereas second echelon’s solutions are composed of RH, RS and customers.
The NSGA-II is a heuristic algorithm designed for optimizations with different types of encoding strategies, and its original version can adapt to binary as well as real number encodings. This paper adopts a real integer-based encoding strategy. Suppose the coalition contains one recycling hub, three retail stores (denoted by
). A Real integer encoded route for one vehicle originating from
to serve 5 customers (denoted by
) can be represented as below in
Table 2.
The above illustration represents the state of the string before the evaluation of objective functions. In other words, the section preceding the origin node 0 is added right before the completion of Step 4 in CW_NSGA-II procedure. During the fitness evaluation, the total distance will be obtained by adding the minimum distance among those of arcs -, -, - and - to the total distance on route and -. After yielding corresponding objective functions values, the original form will be recovered for the selection of parents in Step 5.1 of CW_NSGA-II.
4.4.2. Initialization with Clarke–Wright Savings Algorithm
Clarke–Wright (CW) savings algorithm is a heuristic algorithm proposed by Clarke and Wright [
45], and usually used in the transportation engineering domain to solve shortest path problems. The solution approach is designed to assess NP problems and has as primary goal to search the shortest way to link an origin node to the destination while respecting vehicles payload constraints. CW is usually applied for its simplicity and its computational speed. Its integration in NSGA-II aims at using CW to propose a local sub-optimal routing solution, and in order to avoid the probabilistic failure of randomly generated solutions. In fact, the original version of NSGA-II is based on randomly generated population, and obtaining good solutions can sometimes be lengthy in terms of time. Therefore, CW plays a significant role by providing a good solution as part of the initial solutions. The main steps in the algorithm’s implementation procedure are as follows:
Step 1: Initially consider a link between the retail store and one customer, and calculate the corresponding distance . For ease of computation, CW algorithm solutions are constrained to return to the origin. In consequence, distances should be multiplied by 2, and . Though the proposed mathematical model allows returning to any other facility in the coalition, this assumption would not impact the global solution’s accuracy since the solution constitutes just one string of the initial population.
Step 2: Introduce a new customer, and calculate its distance to the retail store. As in Step 1, the corresponding distance has to be multiplied by 2.
Step 3: Compute the total saved travelled distance in this network with the two customers using formula .
Step 4: Continue to insert new customers to the computation following step 1–3 until all the nodes in the network are considered.
After this procedure, the customer sequence which has yielded the maximum savings in term of total travelled distance will be maintained as sub-optimal solutions of the CW algorithm. Subsequently, the proposed vehicle routing optimization methodology can proceed to the random generation of a population of size Ps-1, and position them behind CW solution in the initial population matrix.
4.5. Minimum Cost-Remaining Savings Method and Monotonic Path Selection
Basic conditions for a logistics facility to participate in the alliance are the possibility to obtain cost savings or extra profits, and a reasonable profit allocation which matches its contribution. Otherwise, the alliance cannot exist or the configuration can be unstable. Therefore, the organizer needs to provide a fair profit allocation strategy. This paper adopts the minimum cost remaining savings method for its simplicity and accuracy.
4.5.1. Minimum Cost-Remaining Saving Method
The Minimum Cost-Remaining Savings (MCRS) is proposed by Tijs and Driessen [
49] for quadratic assignment problems, and is often used to solve cost-sharing or profit-sharing problems in multi-agent cooperative games. This method is not only concise, but when compared to other allocation strategies, it yields results which are closer to the optimal allocation strategy. The allocated profit of each participant is calculated using Equation (21).
Equations (22) and (23) determine the upper and lower bounds of the variables. Equation (24) shows the relation between these bounds and coefficient , which represents the difference proportion of participant j relatively to the sum of all the members. Equation (25) computes coefficient . Equation (26) indicates that the sum of each participant’s profit should be equal to the collective profit. Equations (27)–(29) constrain the allocated profit, and define the maximum and minimum value of participant ’s profit. The minimum value should be equal to the alliance’s profit with a single participant , whereas the maximum value should be the one after all members had joined the alliance. Equations (30) and (31) ensure that a grand cooperative alliance is attractive to all members.
In practice, the organization of a cooperative alliance requires progressive negotiations and the coordination of the third-party logistics service provider or a participant in the alliance. As reward, organizers can extract part of the extra profit of the alliance. Parameter
, also called synergy requirement, refers to the ratio of the extracted amount. The profit that participants can distribute is as follows.
In Equation (32), is the original cost of member before joining the alliance, and represents the cost of the whole alliance. Note that the formation of an alliance is not possible unless the total cost of the alliance is less than the sum of participants’ costs before collaboration, i.e., when , . Besides, with the increase of the value of , the organizer extracts greater from the extra profit. Thus, the formation of the alliance can also be impossible when is too large. It is important to highlight that, under cases where a participant of the alliance acts as coordinator, the synergy requirement can be equal to zero because benefits are already obtained from the cooperative alliance; therefore, .
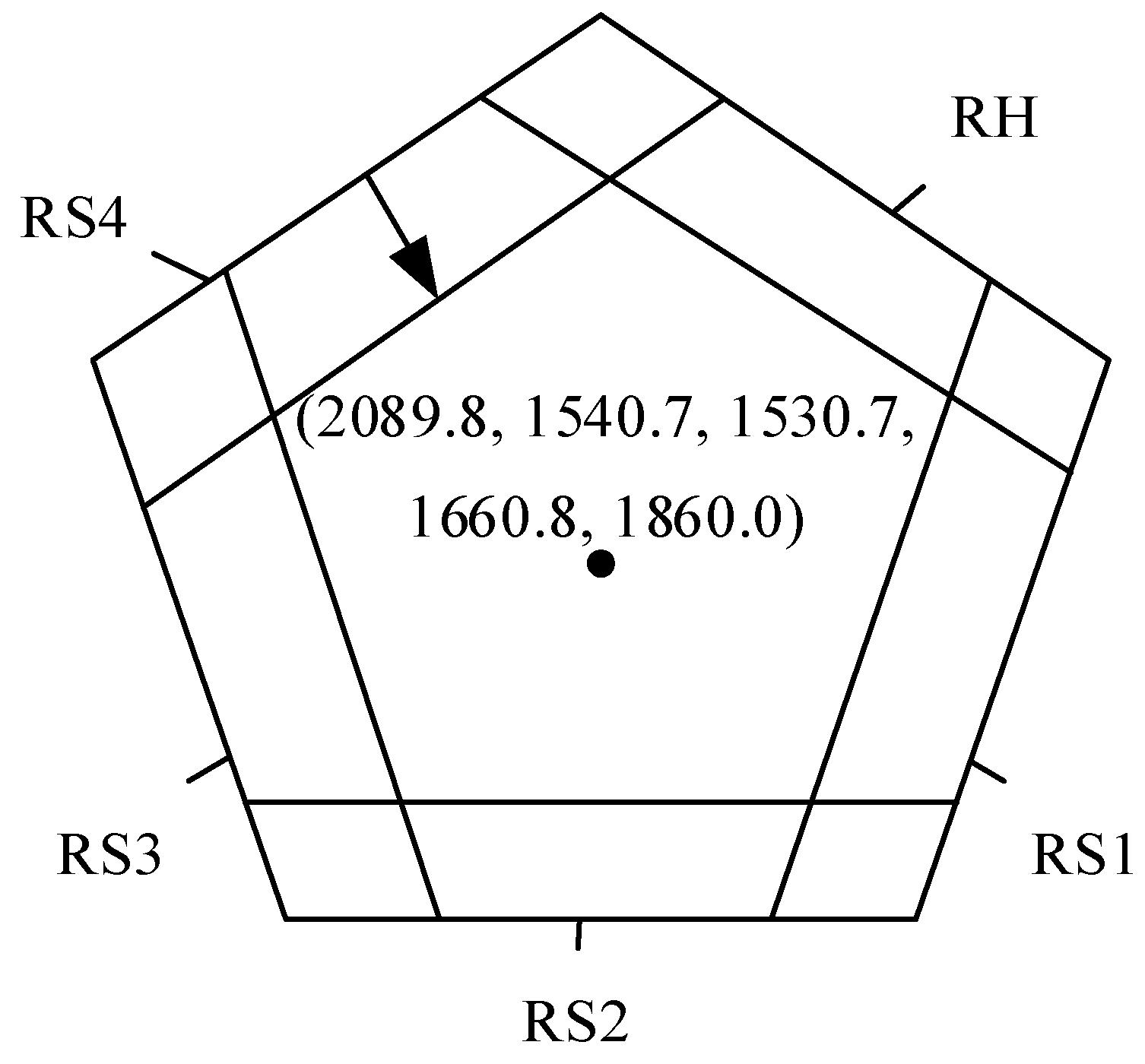
4.5.2. Core Area Calculation
Assuming M members form a cooperative alliance, the core area possesses a closed M-body. Based on the “snowball” theory [
50], narrowing the core is conducive to obtain the optimal allocation strategy. Therefore, to get a more accurate plan, we compress each face of the M-body with an unequal proportion, which is defined on the basis of their marginal contribution. Finally, the center of the core is obtained, and can serve as comparison measure for the best allocation plan. The core distribution scheme is calculated using Equation (33).
s.t.In Equation (33), is the allocated profit of participant , and , in Equation (34), is the compression coefficient . Based on the marginal contribution of participant j, determines the different ratio of inward compression. As stipulated in Equation (35), the sum of the allocated values in the core allocation plan should be equal to the total profit.
4.5.3. Monotonic Path Selection Strategy
The monotonic path selection strategy is an effective method to evaluate the stability of the alliance based on the profit allocation strategy. There are
different cooperative sequences in the grand alliance
, and each sequence exhibits varying degrees of stability.
represents the rank of participant
in the sequence
.
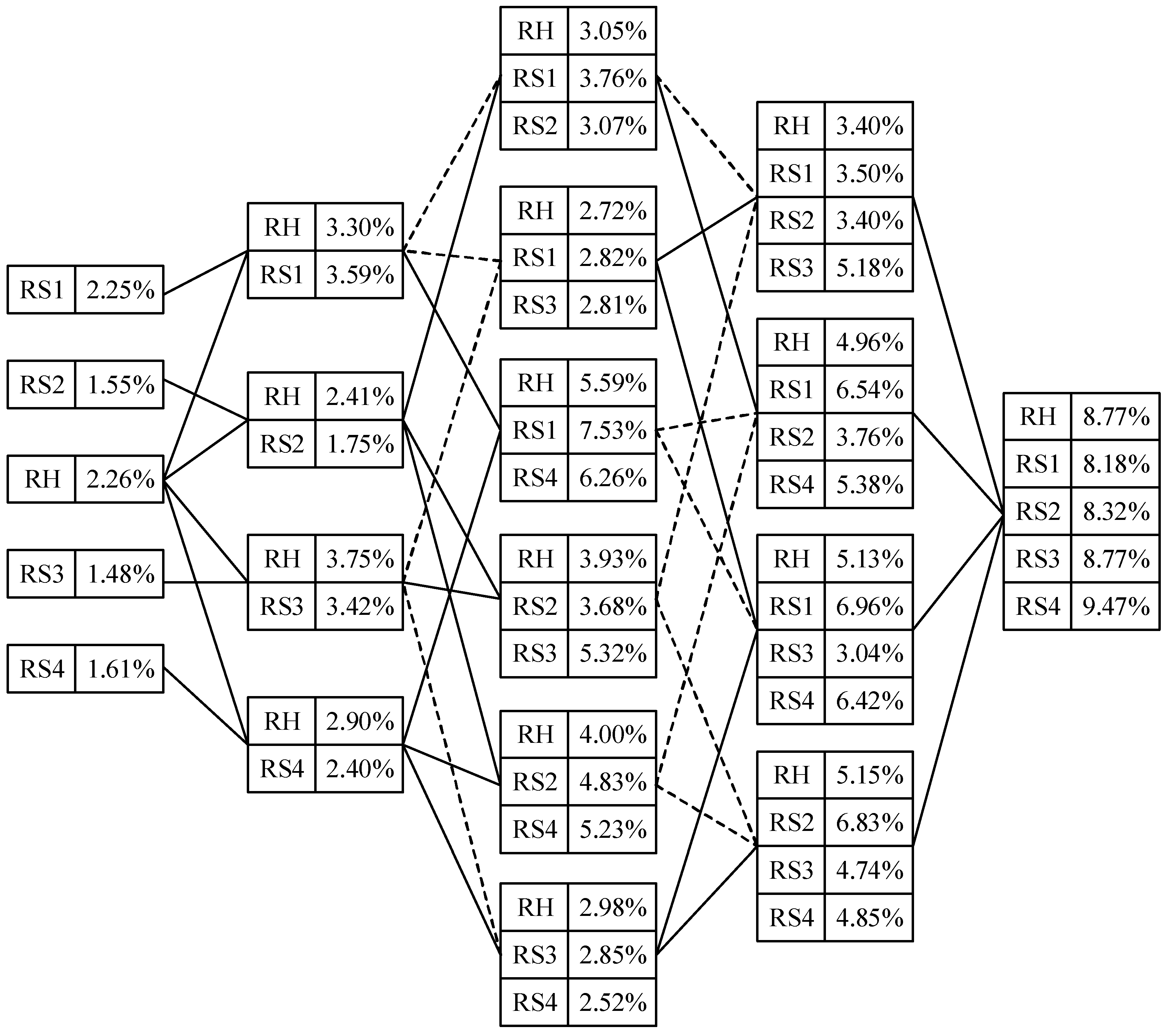
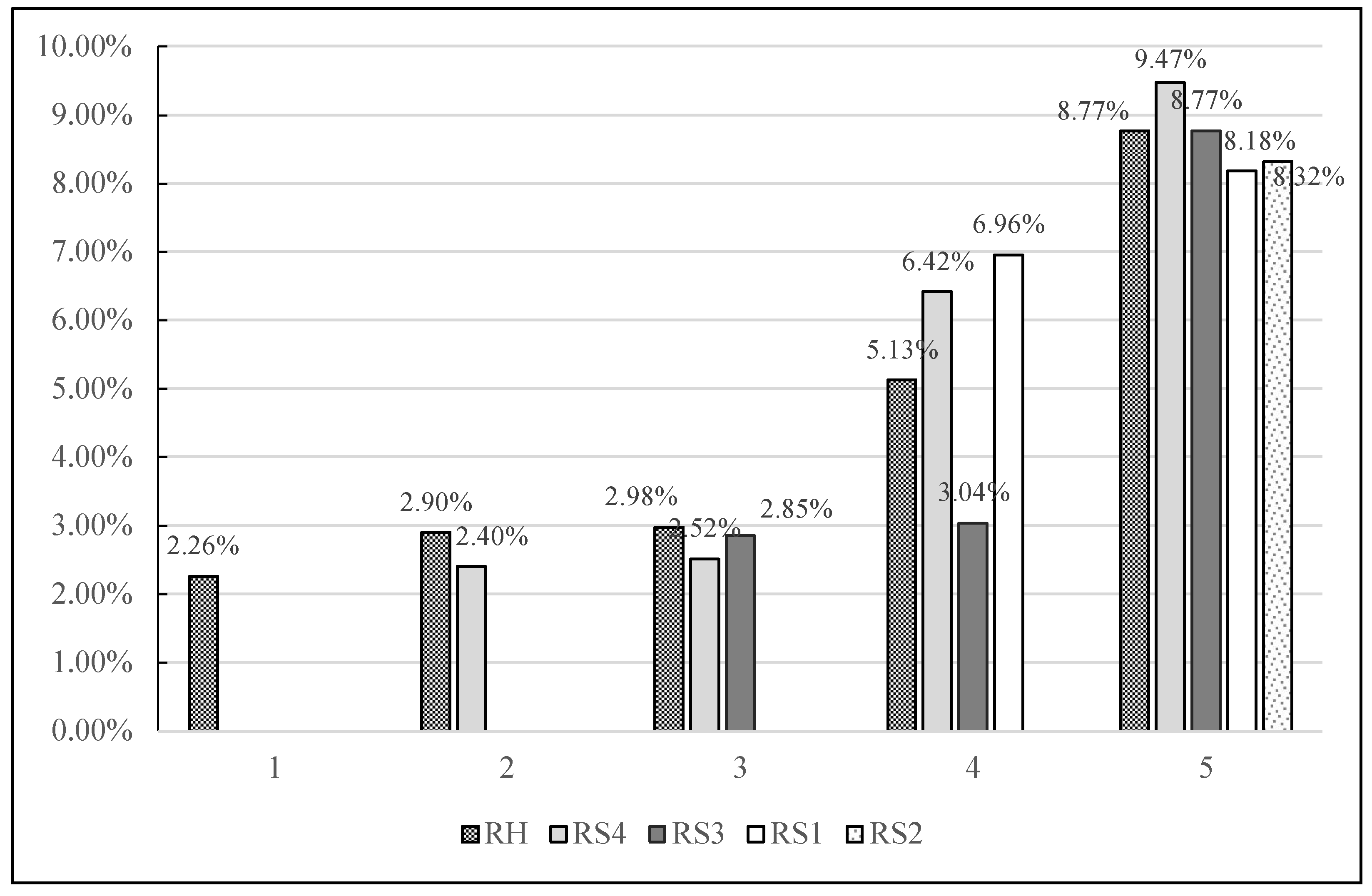
The cost reduction ratio
of participant
in sequence
when member
joins the alliance as the
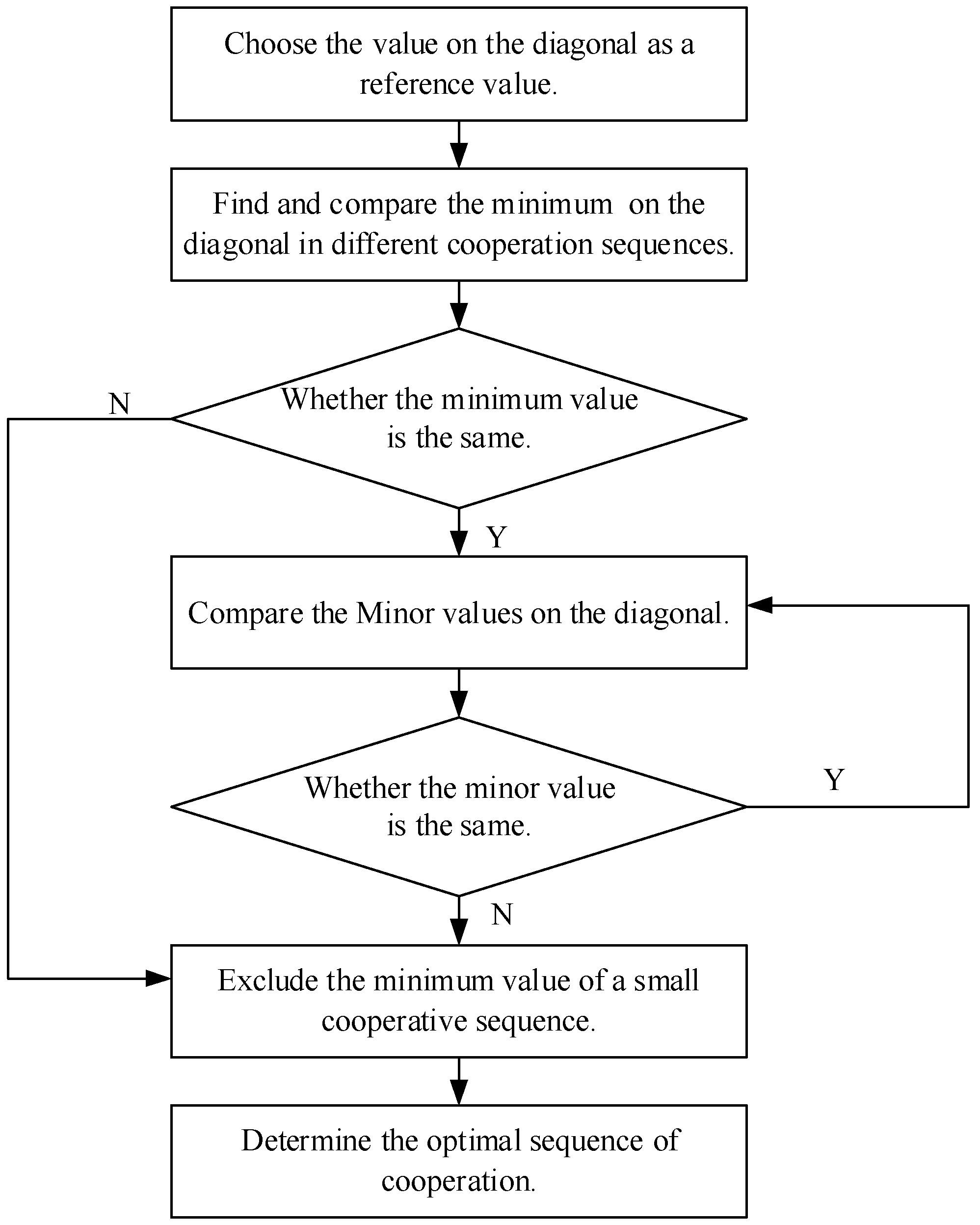
participant can be calculated by the Equation (36). The selection of the monotonic path strategy is based on the reduction percentage of each participant. The effective sequence to select should strictly increase. In other words, the best alliance formation sequence should obey the principle wherein the cost reduction rate of participant
should monotonically increase; such solution is called a Strictly Monotonic Path (SMP). In cases where multiple sequences satisfy the SMP principle, the process presented in
Figure 3 can be followed to select the best.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}