Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM


Abstract
:1. Introduction
- The driving simulator is effective in simulating the weather effects on driving behavior.
- Microscopic traffic simulation programs like VISSIM can be calibrated via inputting weather-sensitive driving behavior parameters to evaluate the changes in traffic flow.
2. Method
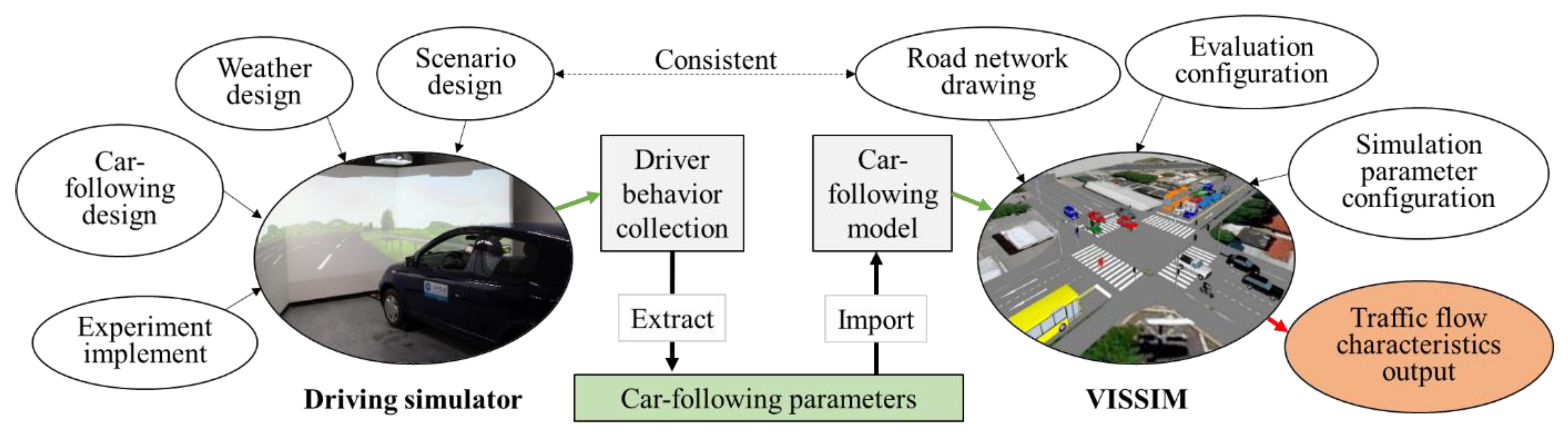
2.1. Combination of the Driving Simulator and Traffic Simulation
2.2. Driving Simulation Experiment and Parameter Extraction
2.2.1. Apparatus
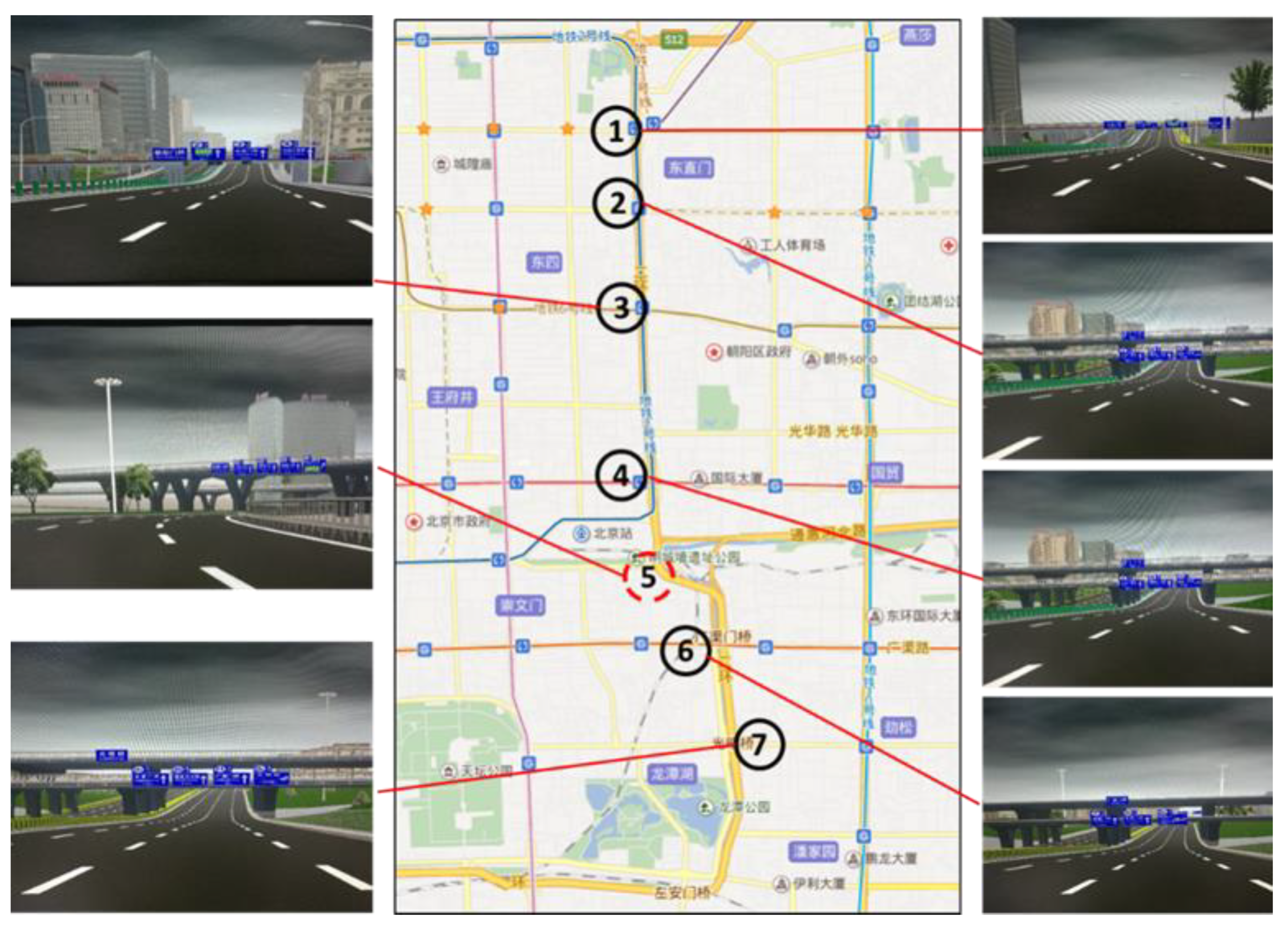
2.2.2. Scenario Design
2.2.3. Weather Design
2.2.4. Traffic Flow State and Car-Following Situation Design
- During cruising car-following process, the speed of the front car is the same as that in the normal state.
- During accelerating car-following process, there are three sub-processes. First, the front car accelerates to 50 or 80 km/h (for traffic flow state (i) or (ii) respectively) with a fixed acceleration of 3.333 or 5 km/h, lasting for 3 s. Then, the front car keeps the speed of 50 or 80 km/h for 2 s. At last, the front car returns to the normal state.
- During decelerating car-following process, there are three sub-processes. First, the front car accelerates to 30 or 55 km/h (for traffic flow state (i) or (ii) respectively) with a fixed acceleration of −3.333 or −5 km/h, lasting for 3 s. Then, the front car keeps the speed of 30 or 55 km/h for 2 s. At last, the front car returns to the normal state.
- Only the data during the first two sub-processes (5 s in total) is collected to extract parameters used in Wiedemann 99 car-following model. If car-following progress is interrupted (by lane-change or overtaking), the corresponding data will be discarded in the extract of the car-following parameter.
2.2.5. Experiment Implementation
2.2.6. Parameters’ Extraction
2.3. Traffic Simulation Based on VISSIM Software
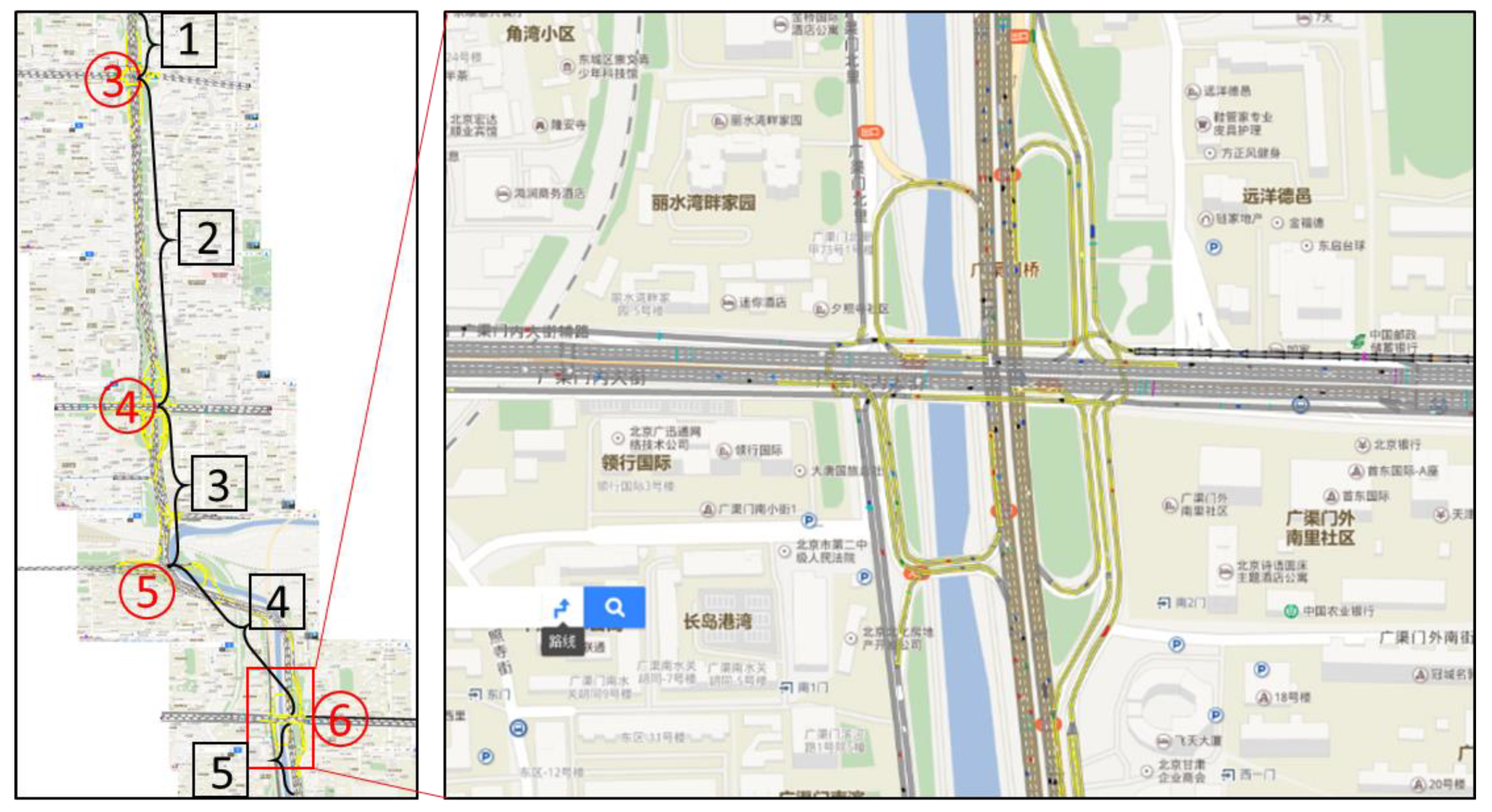
2.3.1. Base Map Design
 ~
~  in Figure 5).
in Figure 5).2.3.2. Calibration of Traffic Flow Distribution
and road sections, field speed and simulation speed on 
 ,
,  road sections have similar trends in both north to south and south to north directions. Although the differences between field speed and simulation speed for each road section are about 15–20 km/h, the consistent tend of field speed and simulation speed also proves that this simulation environment can be used to analyze the relative changes of speeds or other traffic flow characteristics under different weather conditions. The tendencies in Figure 6c,d that plot the field and simulation speeds of , road sections in light rain condition, also prove the effectiveness of the trend. The exception that the 1st and 5th road sections have different trends between field speed and simulation speed is due to the reason that there are vehicle inputs on their beginning (i.e., the initial point of vehicle generation). The effect can be seen at the (the northernmost) road section in the north to south direction and the (the southernmost) road section in the south to north direction. Therefore, in the following simulation, only the data of , road sections are collected.
road sections have similar trends in both north to south and south to north directions. Although the differences between field speed and simulation speed for each road section are about 15–20 km/h, the consistent tend of field speed and simulation speed also proves that this simulation environment can be used to analyze the relative changes of speeds or other traffic flow characteristics under different weather conditions. The tendencies in Figure 6c,d that plot the field and simulation speeds of , road sections in light rain condition, also prove the effectiveness of the trend. The exception that the 1st and 5th road sections have different trends between field speed and simulation speed is due to the reason that there are vehicle inputs on their beginning (i.e., the initial point of vehicle generation). The effect can be seen at the (the northernmost) road section in the north to south direction and the (the southernmost) road section in the south to north direction. Therefore, in the following simulation, only the data of , road sections are collected.2.3.3. VISSIM Simulation in Adverse Weather
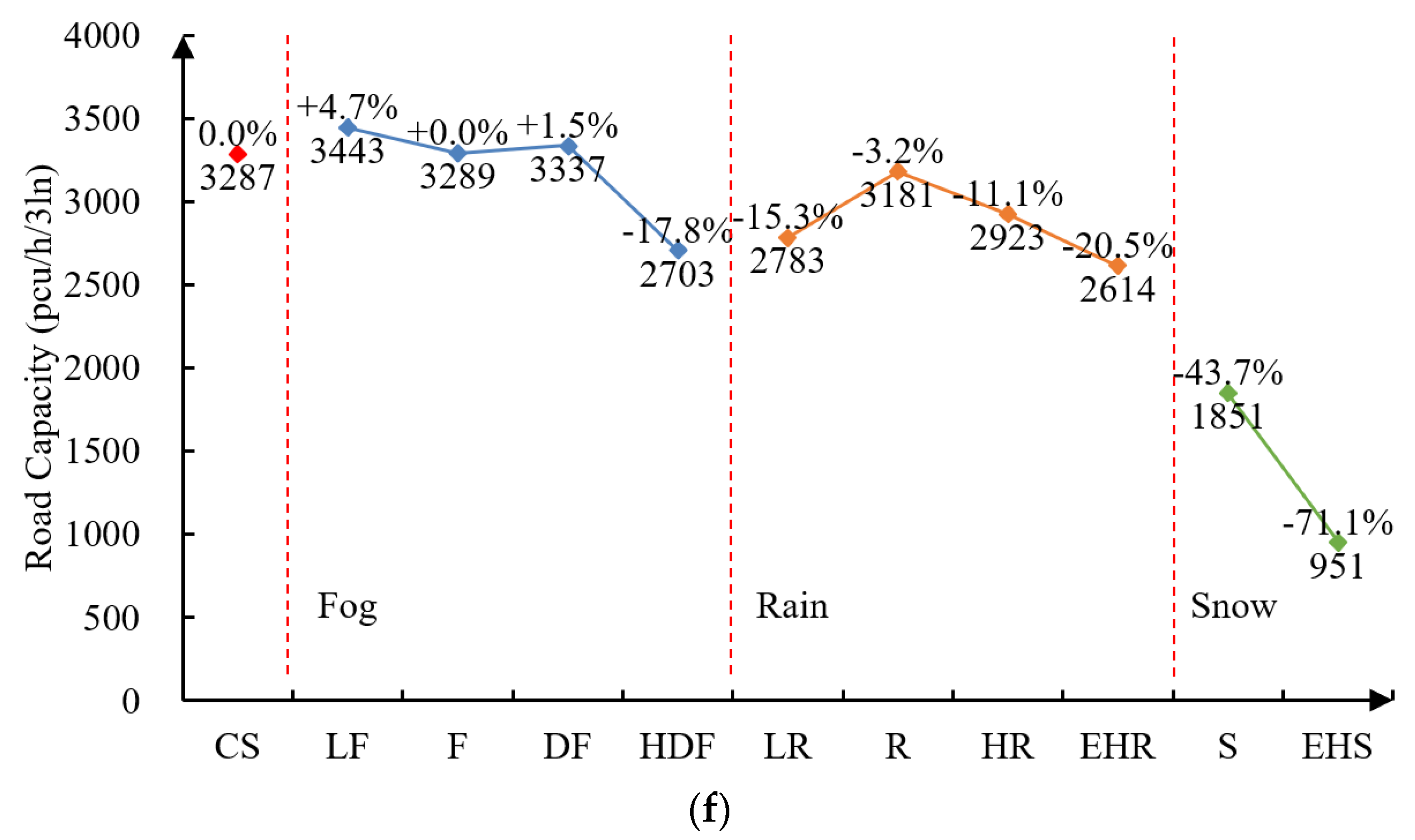
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Beijing.gov.cn. Beijing 2017 National Economic and Social Development Statistics Bulletin. Available online: http://zhengwu.beijing.gov.cn/sj/tjgb/t1509890.htm (accessed on 15 December 2017).
- Gong, D. Impacts of Rainfalls and Snowfalls on Urban Roads Traffic Performance; Beijing Jiaotong University: Beijing, China, 2016. [Google Scholar]
- NavInfo and Cennavi, Q2 Traffic Analysis Report. 2016. Available online: http://www.navinfo.com/news/detail.aspx?id=1126&sort=1 (accessed on 25 May 2018).
- Smith, B.L.; Byrne, K.G.; Copperman, R.B.; Hennessy, S.M.; Goodall, N.J. An investigation into the impact of rainfall on freeway traffic flow. In Proceedings of the 83rd annual meeting of the Transportation Research Board, Washington, DC, USA, 11–15 January 2004. [Google Scholar]
- Agarwal, M.; Maze, T.H.; Souleyrette, R. Impacts of weather on urban freeway traffic flow characteristics and facility capacity. In Proceedings of the 2005 Mid-Continent Transportation Research Symposium, Ames, IA, USA, 18–19 August 2005; pp. 18–19. [Google Scholar]
- Rakha, H.; Farzaneh, M.; Arafeh, M.; Sterzin, E. Inclement weather impacts on freeway traffic stream behavior. Transp. Res. Rec. J. Transp. Res. Board 2008, 2071, 8–18. [Google Scholar] [CrossRef]
- Billot, R.; El Faouzi, N.E.; De Vuyst, F. Multilevel Assessment of the Impact of Rain on Drivers’ Behavior: Standardized Methodology and Empirical Analysis. Transp. Res. Rec. J. Transp. Res. Board 2009, 2107, 134–142. [Google Scholar] [CrossRef]
- Angel, M.; Sando, T.; Chimba, D.; Kwigizile, V. Effects of rain on traffic operations on Florida freeways. Transp. Res. Rec. J. Transp. Res. Board 2014, 2440, 51–59. [Google Scholar] [CrossRef]
- Roh, H.J.; Sharma, S.; Datla, S. The impact of cold and snow on weekday and weekend highway total and passenger cars traffic volumes. Open Transp. J. 2014, 8, 67–72. [Google Scholar] [CrossRef]
- Singh Dhaliwal, S. The Effects of Rain on Freeway Traffic in Southern California. Transp. Res. Rec. J. Transp. Res. Board 2017, 2616. [Google Scholar] [CrossRef]
- Broughton, K.L.; Switzer, F.; Scott, D. Car following decisions under three visibility conditions and two speeds tested with a driving simulator. Accident Anal. Prev. 2007, 39, 106–116. [Google Scholar] [CrossRef] [PubMed]
- Yamaguchi, M.; Sakakima, J. Evaluation of driver stress in a motor-vehicle driving simulator using a biochemical marker. J. Int. Med. Res. 2007, 35, 91–100. [Google Scholar] [CrossRef] [PubMed]
- Konstantopoulos, P.; Chapman, P.; Crundall, D. Driver’s visual attention as a function of driving experience and visibility. Using a driving simulator to explore drivers’ eye movements in day, night and rain driving. Accident Anal. Prev. 2010, 42, 827–834. [Google Scholar] [CrossRef] [PubMed]
- Brooks, J.O.; Crisler, M.C.; Klein, N.; Goodenough, R.; Beeco, R.W.; Guirl, C.; Burroughs, B. Speed choice and driving performance in simulated foggy conditions. Accident Anal. Prev. 2011, 43, 698–705. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Li, X.; Liu, Y.; Zhao, J. Effects of foggy conditions on drivers’ speed control behaviors at different risk levels. Saf. Sci. 2014, 68, 275–287. [Google Scholar] [CrossRef]
- De Groot, S.; Ricote, F.C.; De Winter, J.C.F. The effect of tire grip on learning driving skill and driving style: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2012, 15, 413–426. [Google Scholar] [CrossRef]
- Asamer, J.; van Zuylen, H.J.; Heilmann, B. Calibrating VISSIM to adverse weather conditions. In Proceedings of the 2nd International Conference on Models and Technologies for Intelligent Transportation Systems, Leuven, Belgium, 22–24 June 2011. [Google Scholar]
- Hou, T.; Mahmassani, H.; Alfelor, R.; Kim, J.; Saberi, M. Calibration of traffic flow models under adverse weather and application in mesoscopic network simulation. Transp. Res. Rec. J. Transp. Res. Board 2013, 2391, 92–104. [Google Scholar] [CrossRef]
- Khavas, R.G.; Hellinga, B.; Zarinbal Masouleh, A. Identifying Parameters for Microsimulation Modeling of Traffic in Inclement Weather. Transp. Res. Rec. J. Transp. Res. Board 2017, 2613, 52–60. [Google Scholar] [CrossRef]
- Jung, S.; Qin, X.; Noyce, D. Modeling highway safety and simulation in rainy weather. Transp. Res. Rec. J. Transp. Res. Board 2011, 2237, 134–143. [Google Scholar] [CrossRef]
- Kim, J.; Mahmassani, H.; Vovsha, P.; Stogios, Y.; Dong, J. Scenario-based approach to analysis of travel time reliability with traffic simulation models. Transp. Res. Rec. J. Transp. Res. Board 2013, 2391, 56–68. [Google Scholar] [CrossRef]
- Fellendorf, M. VISSIM: A microscopic simulation tool to evaluate actuated signal control including bus priority. In Proceedings of the 64th Institute of Transportation Engineers Annual Meeting, Dallas, TX, USA, 16–19 October 1994; pp. 1–9. [Google Scholar]
- Li, Z.; DeAmico, M.; Chitturi, M.V.; Bill, A.R.; Noyce, D.A. Calibration of VISSIM Roundabout Model: A Critical Gap and Follow-Up Headway Approach. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Manjunatha, P.; Vortisch, P.; Mathew, T.V. Methodology for the Calibration of VISSIM in Mixed Traffic. In Proceedings of the Transportation Research Board 92nd Annual Meeting, Washington DC, USA, 13–17 January 2013. [Google Scholar]
- PTV VISION, VISSIM 5.30-05 User Manual. 2011. Available online: https://www.et.byu.edu/~msaito/CE662MS/Labs/VISSIM_530_e.pdf. (accessed on 31 July 2017).
- Ding, H.; Zhao, X.; Rong, J.; Ma, J. Experimental research on the effectiveness of speed reduction markings based on driving simulation: A case study. Accident Anal. Prev. 2013, 60, 211–218. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Guan, W.; Liu, X. A pilot study verifying how the curve information impacts on the driver performance with cognition model. Discret. Dyn. Nat. Soc. 2013, 2013, 316896. [Google Scholar] [CrossRef]
- Li, J.; Zhao, X.; Xu, S.; Ma, J.; Rong, J. The study of driving simulator validation for physiological signal measures. Procedia-Soc. Behav. Sci. 2013, 96, 2572–2583. [Google Scholar] [CrossRef]
- Beijing Transport Institute. Available online: http://www.bjtrc.org.cn/InfoCenter%5CNewsAttach%5C2015%E5%B9%B4%E4%BA%A4%E9%80%9A%E8%BF%90%E8%A1%8C%E6%8A%A5%E5%91%8A_20160303145741564.pdf (accessed on 15 December 2017).
- Available online: http://www.niuche.com/news/detail_479869.html (accessed on 18 January 2019).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Configuration of Three Functions | Matched Weather Condition (Actual Weather Grade) | Abbreviation | |||
|---|---|---|---|---|---|---|
| SetRain (%) | SetSnow (%) | SetFog (m) | Friction (%) | |||
| 1 | - | - | 10000 | 100 | Clear Sky | CS |
| 2 | - | - | 1500 | 100 | Light Fog (1000 < S ≤ 100,000) | LF |
| 3 | - | - | 800 | 100 | Fog (500 < S ≤ 1000) | F |
| 4 | - | - | 300 | 100 | Dense Fog (200 < S ≤ 500) | DF |
| 5 | - | - | 50 | 100 | Heavy Dense Fog (50 < S ≤ 200) | HDF |
| 6 | 20 | - | 2000 | 100 | Light Rain (0–9.9) mm/24 h | LR |
| 7 | 45 | - | 800 | 75 | Rain (10.0–24.9) mm/24 h | R |
| 8 | 70 | - | 550 | 60 | Heavy Rain (25.0–49.9) mm/24 h | HR |
| 9 | 95 | - | 300 | 45 | Extremely Heavy Rain (100.0–249.0) mm/24 h | EHR |
| 10 | - | 45 | 500 | 45 | Snow (2.5–4.9) mm/24 h | S |
| 11 | - | 95 | 100 | 20 | Extremely Heavy Snow (10–19.9) mm/24 h | EHS |
| Parameter | Description | Computational Method |
|---|---|---|
| CC0 | Standstill distance | |
| CC1 | Headway time | |
| CC2 | Following variation | |
| CC3 | Threshold for entering Following | |
| CC4 | Negative following threshold | |
| CC5 | Positive following threshold | |
| CC6 | Speed dependency of Oscillation | |
| CC7 | Oscillation acceleration | |
| CC8 | Standstill acceleration | |
| CC9 | Acceleration with 80 km/h |
| Road Type | Weather Condition | CC0 (m) | CC1 (s) | CC2 (m) | CC3 (s) | CC4 (m/s2) | CC5 (m/s2) | CC6 (-) | CC7 (m/s2) | CC8 (m/s2) | CC9 (m/s2) | Desired Speed (km/h) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Basic segment | CS | 4.45 | 0.87 | 5.28 | −7.92 | −1.52 | 1.52 | 0.71 | 0.31 | 1.03 | 0.33 | 67.93 |
| LF | 1.84 | 1.51 | 6.38 | −8.57 | −1.26 | 1.26 | 0.73 | 0.32 | 1.30 | 0.30 | 72.26 | |
| F | 3.02 | 1.44 | 7.48 | −6.99 | −0.92 | 0.92 | 0.73 | 0.32 | 1.37 | 0.32 | 71.03 | |
| DF | 1.78 | 1.52 | 7.33 | −7.47 | −0.84 | 0.84 | 0.64 | 0.33 | 1.28 | 0.33 | 71.43 | |
| HDF | 1.60 | 1.26 | 19.40 | −5.37 | −0.83 | 0.83 | 0.25 | 0.34 | 1.18 | 0.26 | 53.63 | |
| LR | 9.54 | 1.21 | 6.36 | −7.47 | −0.67 | 0.67 | 0.64 | 0.34 | 1.30 | 0.35 | 72.48 | |
| R | 1.06 | 1.67 | 9.67 | −7.24 | −0.64 | 0.64 | 0.56 | 0.35 | 1.34 | 0.38 | 67.87 | |
| HR | 5.36 | 1.45 | 10.70 | −6.46 | −0.61 | 0.61 | 0.65 | 0.35 | 1.32 | 0.33 | 67.47 | |
| EHR | 1.34 | 2.31 | 11.20 | −8.39 | −0.60 | 0.60 | 0.68 | 0.36 | 1.34 | 0.31 | 71.11 | |
| S | 2.33 | 3.93 | 16.00 | −7.01 | −0.59 | 0.59 | 0.64 | 0.38 | 1.37 | 0.32 | 67.88 | |
| EHS | 1.00 | 10.88 | 20.00 | −8.09 | −0.43 | 0.43 | 0.57 | 0.39 | 1.36 | 0.30 | 63.9 | |
| Upslope | CS | 4.45 | 1.30 | 8.58 | −7.92 | −2.10 | 2.10 | 0.62 | 0.40 | 1.03 | 0.33 | 67.93 |
| LF | 1.84 | 1.24 | 8.89 | −8.57 | −2.36 | 2.36 | 0.60 | 0.37 | 1.30 | 0.30 | 72.26 | |
| F | 3.02 | 1.25 | 11.68 | −6.99 | −0.90 | 0.90 | 0.68 | 0.38 | 1.37 | 0.32 | 71.03 | |
| DF | 1.78 | 1.70 | 3.73 | −7.47 | −0.98 | 0.98 | 0.75 | 0.36 | 1.28 | 0.33 | 71.43 | |
| HDF | 1.60 | 1.18 | 20.70 | −5.37 | −1.15 | 1.15 | 0.50 | 0.36 | 1.18 | 0.26 | 53.63 | |
| LR | 9.54 | 1.08 | 13.33 | −7.47 | −1.41 | 1.41 | 0.68 | 0.38 | 1.30 | 0.35 | 72.48 | |
| R | 1.06 | 1.27 | 18.02 | −7.24 | −0.93 | 0.93 | 0.69 | 0.38 | 1.34 | 0.38 | 67.87 | |
| HR | 5.36 | 1.26 | 7.47 | −6.46 | −0.87 | 0.87 | 0.68 | 0.37 | 1.32 | 0.33 | 67.47 | |
| EHR | 1.34 | 2.36 | 19.43 | −8.39 | −1.02 | 1.02 | 0.57 | 0.36 | 1.34 | 0.31 | 71.11 | |
| S | 2.33 | 4.33 | 16.00 | −7.01 | −0.79 | 0.79 | 0.68 | 0.37 | 1.37 | 0.32 | 67.88 | |
| EHS | 1.00 | 6.74 | 20.00 | −8.09 | −1.06 | 1.06 | 0.47 | 0.40 | 1.36 | 0.30 | 63.9 | |
| Downslope | CS | 4.45 | 0.56 | 3.84 | −7.92 | −2.53 | 2.53 | 0.63 | 0.42 | 1.03 | 0.33 | 67.93 |
| LF | 1.84 | 0.82 | 4.64 | −8.57 | −2.19 | 2.19 | 0.54 | 0.47 | 1.30 | 0.30 | 72.26 | |
| F | 3.02 | 0.73 | 6.99 | −6.99 | −1.84 | 1.84 | 0.56 | 0.44 | 1.37 | 0.32 | 71.03 | |
| DF | 1.78 | 1.01 | 3.02 | −7.47 | −1.82 | 1.82 | 0.52 | 0.38 | 1.28 | 0.33 | 71.43 | |
| HDF | 1.60 | 0.67 | 11.91 | −5.37 | −1.83 | 1.83 | 0.42 | 0.41 | 1.18 | 0.26 | 53.63 | |
| LR | 9.54 | 0.57 | 6.31 | −7.47 | −1.73 | 1.73 | 0.55 | 0.41 | 1.30 | 0.35 | 72.48 | |
| R | 1.06 | 0.67 | 16.28 | −7.24 | −1.56 | 1.56 | 0.36 | 0.40 | 1.34 | 0.38 | 67.87 | |
| HR | 5.36 | 0.63 | 5.78 | −6.46 | −1.63 | 1.63 | 0.51 | 0.42 | 1.32 | 0.33 | 67.47 | |
| EHR | 1.34 | 2.00 | 14.13 | −8.39 | −1.76 | 1.76 | 0.47 | 0.45 | 1.34 | 0.31 | 71.11 | |
| S | 2.33 | 4.11 | 16.00 | −7.01 | −1.68 | 1.68 | 0.52 | 0.43 | 1.37 | 0.32 | 67.88 | |
| EHS | 1.00 | 8.14 | 20.00 | −8.09 | −1.48 | 1.48 | 0.38 | 0.46 | 1.36 | 0.30 | 63.9 |
| Weather | Literature | Changes on Capacity | Changes on Speed | ||
|---|---|---|---|---|---|
| Result in Our Paper | Results in Literature | Result in Our Paper | Results in Literature | ||
| Light rain | Rakha, Farzaneh et al. (2008) | −15.3% | −10~−11% | −3.1% | −8~−10% |
| Rain | Agarwal, Maze, et al. (2005) | −3.2% | −7~−8% | −2.0% | −8~−12% |
| Heavy rain | Smith, Byrne, et al. (2004) | −11.1% | −4~−10% | −7.6% | −5.0~−6.5% |
| Agarwal, Maze, et al. (2005) | −10~−17% | −4~−7% | |||
| Snow | Roh, Sharma, et al. (2014) | −43.7% | −25% | −19.2% | - |
| Heavy snow | Smith, Byrne, et al. (2004) | −25~−30% | - | ||
| Agarwal, Maze, et al. (2005) | −19~−27% | −11~−15% | |||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Zhao, X.; Liu, H.; Ren, G.; Zhang, Y.; Liu, X. Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM. Sustainability 2019, 11, 830. https://doi.org/10.3390/su11030830
Chen C, Zhao X, Liu H, Ren G, Zhang Y, Liu X. Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM. Sustainability. 2019; 11(3):830. https://doi.org/10.3390/su11030830
Chicago/Turabian StyleChen, Chen, Xiaohua Zhao, Hao Liu, Guichao Ren, Yunlong Zhang, and Xiaoming Liu. 2019. "Assessing the Influence of Adverse Weather on Traffic Flow Characteristics Using a Driving Simulator and VISSIM" Sustainability 11, no. 3: 830. https://doi.org/10.3390/su11030830