1. Introduction
Remote sensing has been systematically applied for the monitoring of vegetations and environmental parameters to achieve the optimization of agroforestry activities for decision-making. Traditionally, satellite remote sensing (SRS) can provide a wide range of monitoring with coarse spatial and long-time interval revisits. The disadvantages of SRS have profoundly limited its use in precise agriculture monitoring, especially on a small farm. Fortunately, unmanned aerial vehicles (UAV) carrying small-sized and high-quality sensoary cameras have recently received more attention as a cost-effective remote sensing technique. In particular, the UAV platform with the multispectral camera is gaining the spotlight due to the advantages of being low cost, having easy deployment, while high spectral and spatial resolution are also obtained. [
1,
2]. As a new tool for image collection, UAV-remote sensing (RS) complements SRS, filling the gap between large area imaging being less time-consuming and providing highly accurate data for terrestrial analysis.
The rapid development of UAV-RS is ascribed to the low-cost of the systems, having more precise GPS technology and high-power density batteries, improved communication devices, and importantly having a variety of sensors that can be mounted on the UAV platform. This has greatly improved the ability of earth observation. Researchers can acquire imagery according to their schedule and convenience by alternating the sensors. UAV platforms (fixed-wing and rotor-based) can be coupled with a sensor for remote sensing using an RGB camera for aerial mapping and surveying. With advanced sensors like a multispectral camera, providing high spatial resolution with an additional spectral band, has great potential for studies involving small farm management [
3]. For agricultural applications, UAVs have advantages in earlier detection of weeds, pests, and water and heat stress. In addition, UAVs can gather accurate information about crops response to different treatments, which is an effective way of retrieving temporal information for farm management. In addition, UAVs are also suitable for forestry activities, such as monitoring wildlife and water status, wildfire detection, forest preservation, biomass estimation, and disease monitoring, without disturbing the original circumstance.
Commonly the temporal data analysis acquired from the UAV platform is affected by sensor characteristics, illumination conditions, geometrical alignment, and atmospheric conditions. Hence, the digital numbers (DNs) are not true representatives of the surface reflectance [
4]. Therefore, to monitor everyday farmland with the lasting quantitative value, the remotely sensed data should account for atmospheric, solar and topographic conditions as well as camera noise [
5]. Radiometric calibration is a way of converting source data that have physical units of reflectance, which is used to build quantitative spectral, spatial, and temporal representations of the environment. The radiometrically calibrated images allow an efficient way to compute the vegetation indices, such as the reflectance ratio or the normalized difference vegetation index (NDVI) that are useful to understand the plant status namely, nitrogen, chlorophyll content, and green leaf biomass [
6,
7,
8,
9].
Radiometric calibration is performed either by absolute or relative ways. In absolute radiometric calibration, the raw DN value of the image is converted into a scene reflectance based on derived parameter values. In contrast, relative radiometric calibration normalizes the output of the sensor with a reference image so that a uniform response is obtained for the subsequent image [
10]. The main process of radiometric calibration is capturing the images of Lambertian targets that have different reflectance levels, and then the DN of these Lambertian targets are calculated and averaged to obtain the radiometric calibration parameters for each band. The physically based methods and empirical methods are the two kinds of calibration methods that are most commonly used. The fundamental is to eliminate the disturbances caused by the atmosphere and the camera itself. The physically based methods, such as 6S and MODTRAN, can produce absolute calibration through process-based simulations. All the representatives of physically based methods can be found in [
11,
12,
13]. However, these models are complicated to perform in comparison with empirical methods. Commonly, applied empirical methods are dark object methods, the linear regression method (LRM), and a histogram matching method [
14,
15,
16].
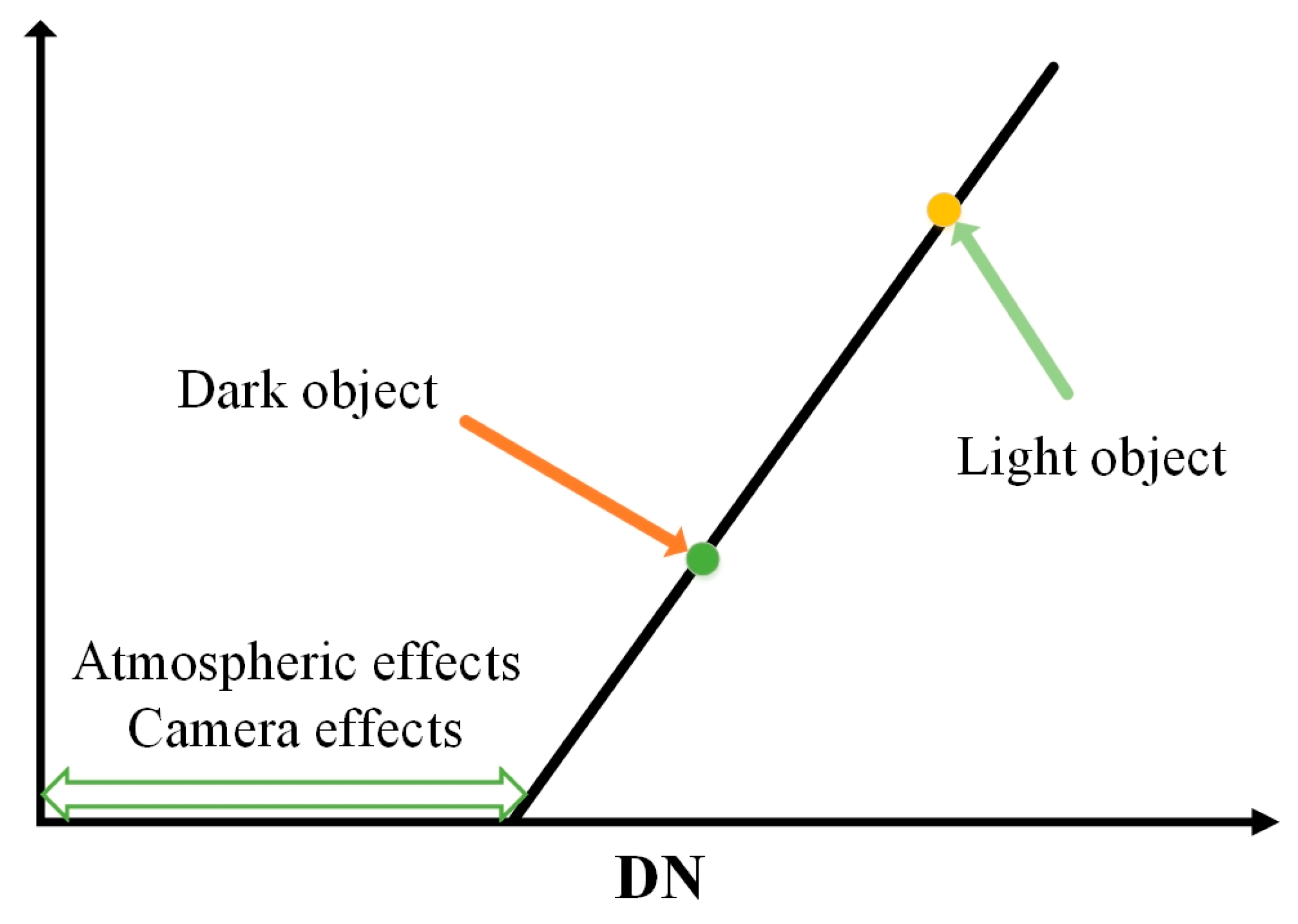
In many applications, the bidirectional reflectance distribution function (BRDF-correction) should be completed to eliminate the influences of object reflectance anisotropy, for example, to produce uniform image mosaics the special challenge of the BRDF-correction is the adoption of different BRDF-based models [
17,
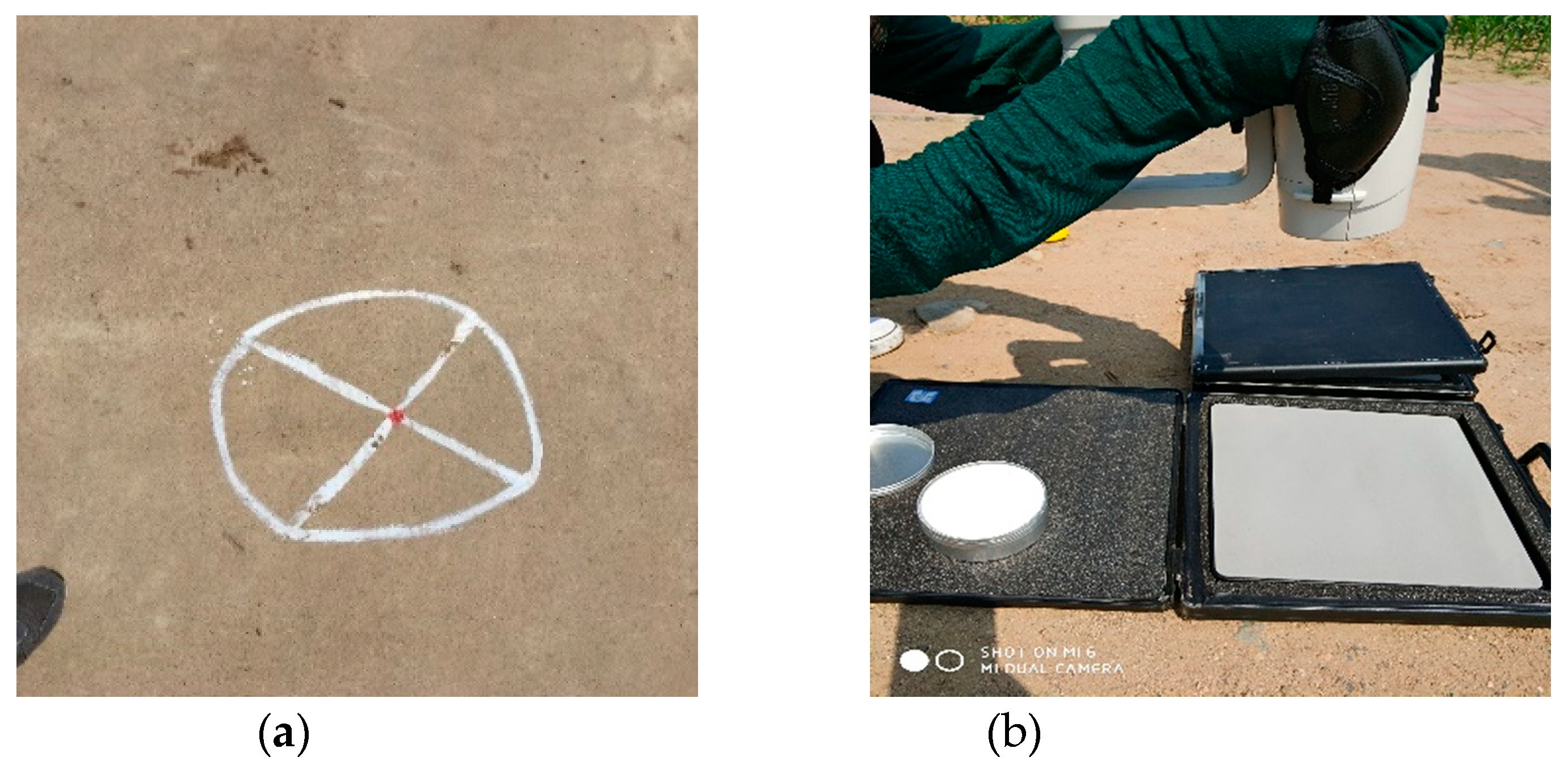
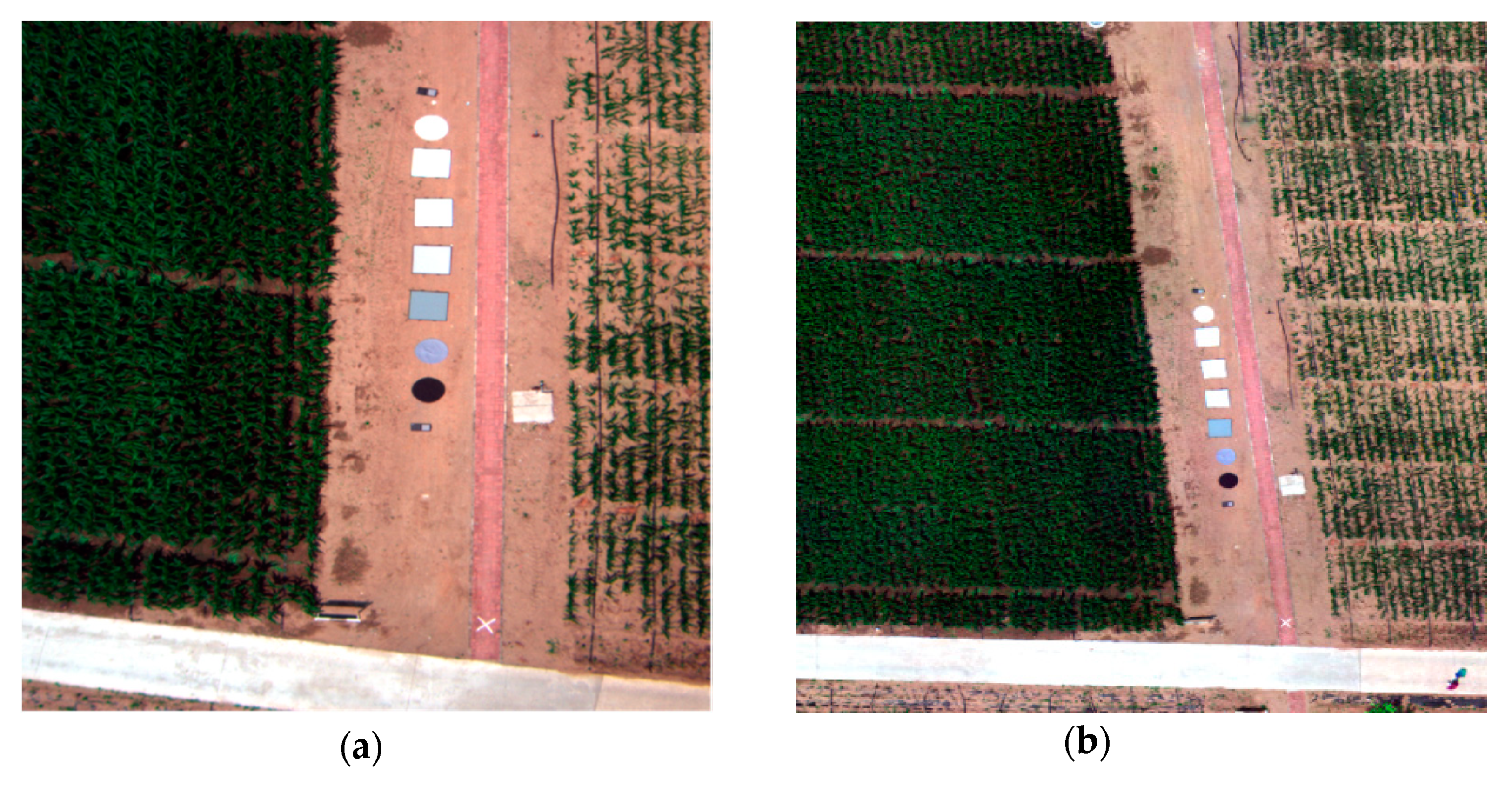
18]. The LRM is most adopted in practice, especially when ground data is not collected. The LRM uses a linear regression approach to estimate the surface reflectance. For a given image, the use of LRM can be divided into three parts: (1) measuring the DN values and reflectance of the same regions of interest (ROIs) belonging to the calibration targets; (2) confirming the calibration equations by modeling the linear relationship between DN values and reflectance for each band; and (3) calibrating all the bands with the confirmed calibration equations. The calibration targets can be selected as natural targets, such as water, desert, and plain road. These plain targets are suggested to be calibrated and validated. To be more precise, linear Lambertian targets are frequently used since the homogeneity of reflectance is in all directions. In this study, calibration targets used are customized professional calibration targets. Typically, the DNs are plotted on the X-axis, and the reflectance is plotted on the Y-axis. The relationship developed using pseudo photo targets is then used to calibrate the UAV images for atmospheric correction and to remove camera noise. The reference targets are used to calculate the difference between the reflectance from calibrated images and the field measured reflectance. To achieve this, different natural and artificial surfaces are used to make sure the precise calibrations. The reflectance from calibrated images and field data covering the same region are used to validate the precision.
In the literature, many researchers have applied a series of ecological and agricultural related applications using multispectral images acquired from UAV platforms. Ahmed et al., 2017, assessed the hierarchical land cover and vegetation classification with NDVI using multispectral data acquired by a parrot sequoia camera from a UAV platform. Even though the parrot sequoia camera can acquire the reflectance of objects directly, reflectance of this level contains too many uncertainties from atmospheric effects and camera noise [
19]. Akar et al. 2016 improved the classification accuracy of the rangeland using a combination of WorldView-2 and UAV images [
20]. However, no ground control point (GCP) and calibration targets were mentioned to generate the orthophoto. If the images are calibrated to the unit of reflectance, the results may be greatly improved. Francisco et al., 2015, monitored sunflower by acquiring the multi-temporal images using a UAV. A TETRACAM camera mounted on the UAV system generated high-resolution images for precision agriculture applications with RGB and near infrared (NIR) spectral bands to assess the health of corn [
21]. TETRACAM camera generated high-resolution spectral images were used by Nikrooz for precision agriculture applications and RGB and NIR cameras mounted on the UAV system adopted by Doering to assess the health of corn [
22]. Laliberte et al., 2011, adopted the object-based image analysis (OBIA) method to monitor and assess the rangeland using ultra-high-resolution multispectral images acquired from a fixed-wing UAV [
1]. Garciaruiz et al., 2013, exploited a low-altitude UAV, which was combined with a multispectral camer. The system was then used for plant detection by the calculated vegetation index [
23]. Candiago et al., 2015, used mosaic multispectral images for extracting vegetation indices, and the growing condition of the whole farm was obtained and evaluated. In most of the aforementioned studies, no calibration methods are discussed. If the images had have been calibrated, then the results would have been improved significantly [
24]. Primicerio et al., 2012, developed a flexible and powerful UAV for assessing the management of vineyards. The multispectral images were used to calculate the NDVI, which showed better agreement with the field data [
25]. Del Pozo et al., 2014, discussed the radiometric calibration process by means of a vicarious method. In their study, artificial and natural covers were used as reference surfaces for validation [
26].
There are so many articles which discuss the need for the calibration in remote sensing (RS), especially in the applications of ecology and agriculture. To date, only a few works have emphasized the benefits of radiometric calibration of multispectral images acquired from narrow bands cameras on UAV platforms. However, the traditional camera with wide bands can only extract the vegetation region [
27]. Sun-induced fluorescence (SIF) can be used as an indicator for stress detection in agricultural applications during the growth of crops, particularly during the grain-filling stage when photosynthesis is sensitive to climate factors [
28]. The SIF date extracted from remote sensed images is a fresh new perspective to assess photosynthesis at a larger scale within a short time [
29]. In addition, gross primary production is closely connected with canopy chlorophyll, which can be further used in C circle research [
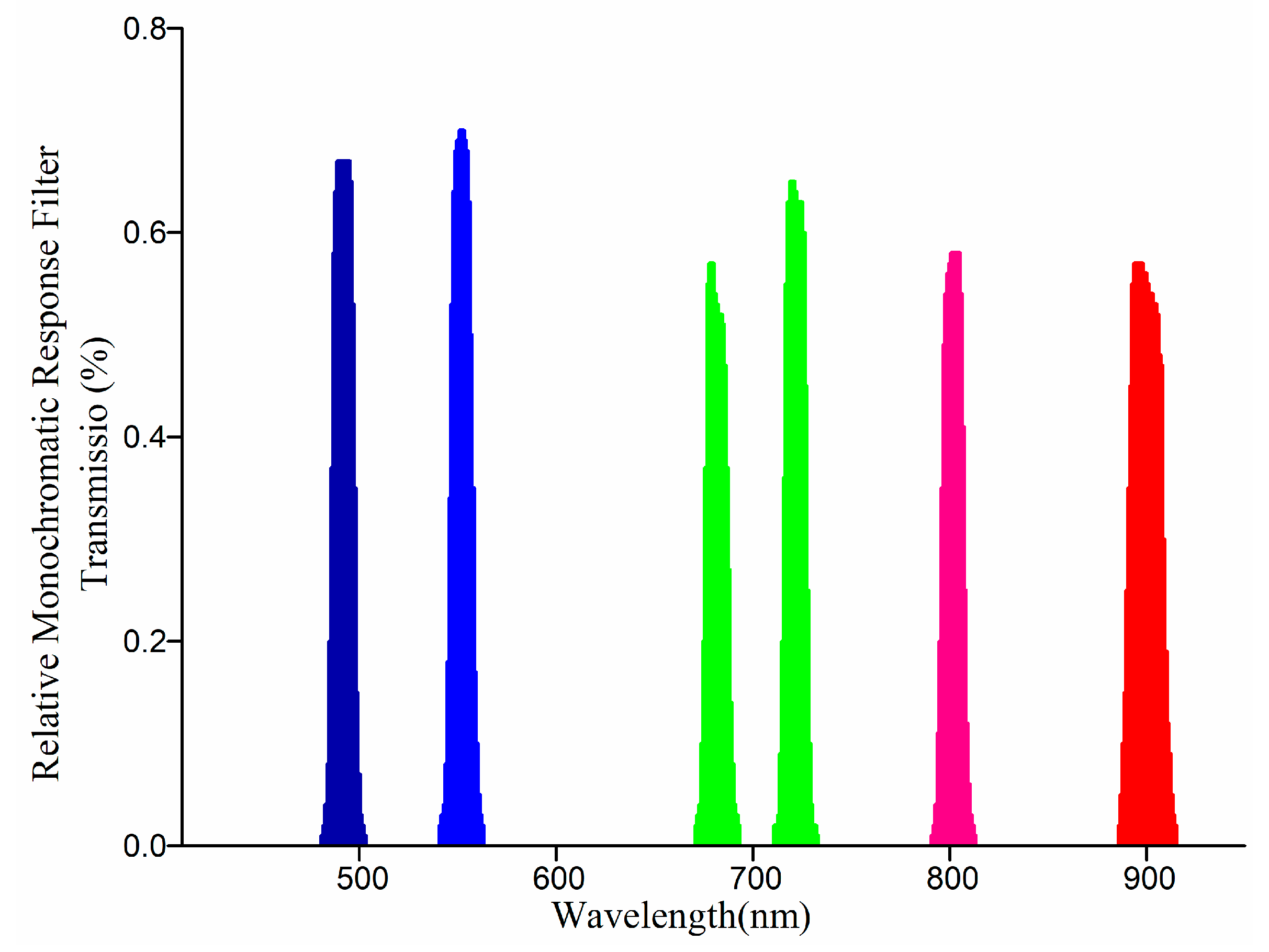
30]. The Mini MCA 6 camera contains six narrow bands, which means it has the ability for quantitative parameter retrievals, such as imaging and extracting chlorophyll fluorescence for vegetation stress evaluation [
31,
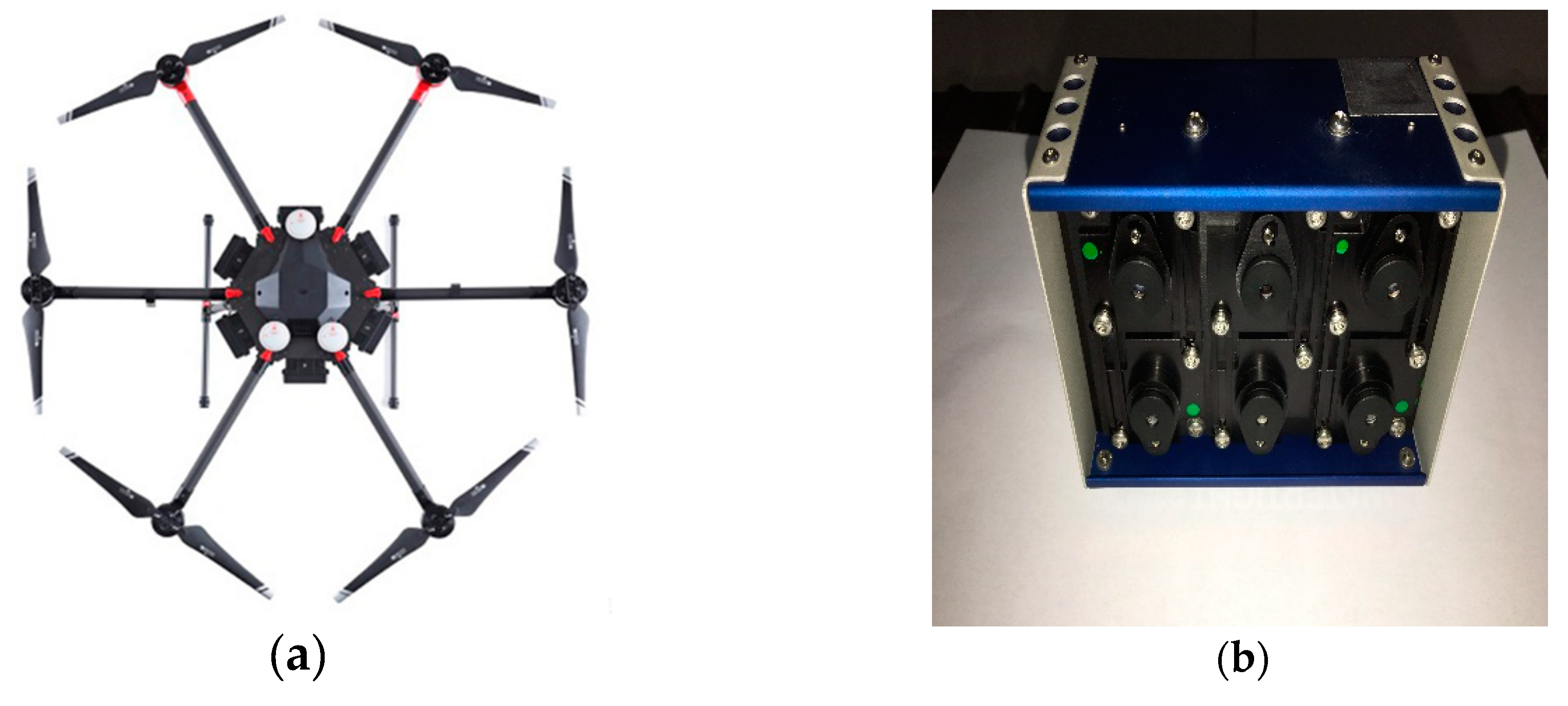
32]. In the literature, fewer works are available on the radiometric calibration of the Mini MCA 6 camera for which, in most circumstances, the imaging conditions are considered very simple. This study focuses on in detail on the radiometric calibration of a Mini MCA 6 camera considering images acquired from different altitudes and in varied imaging weather conditions.
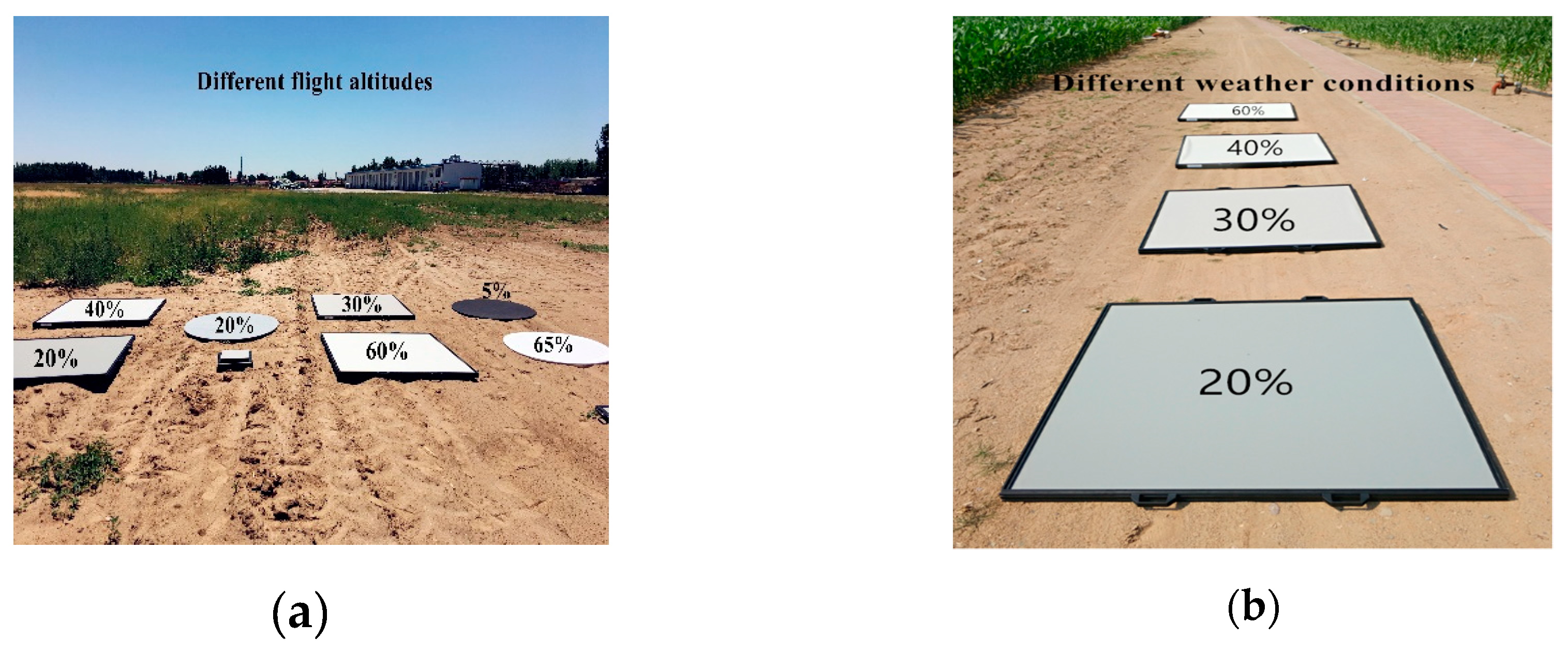
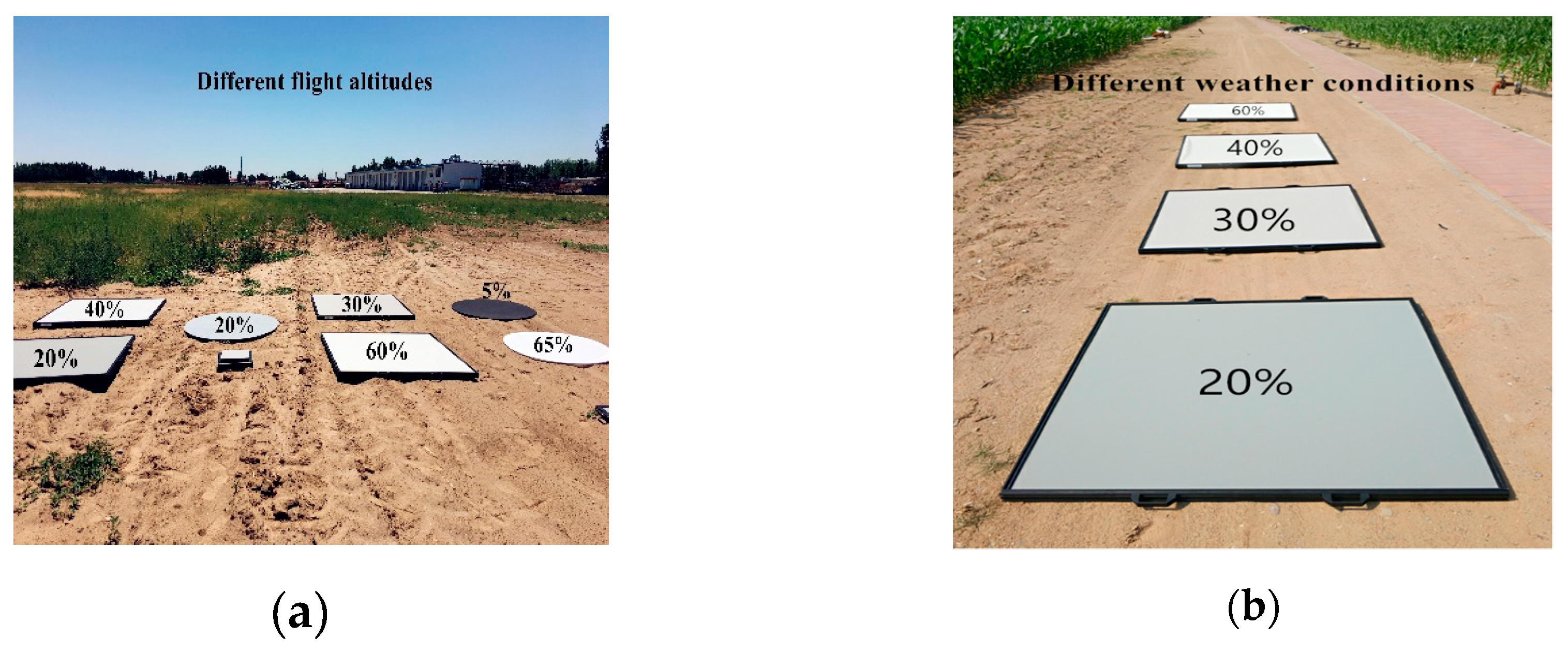
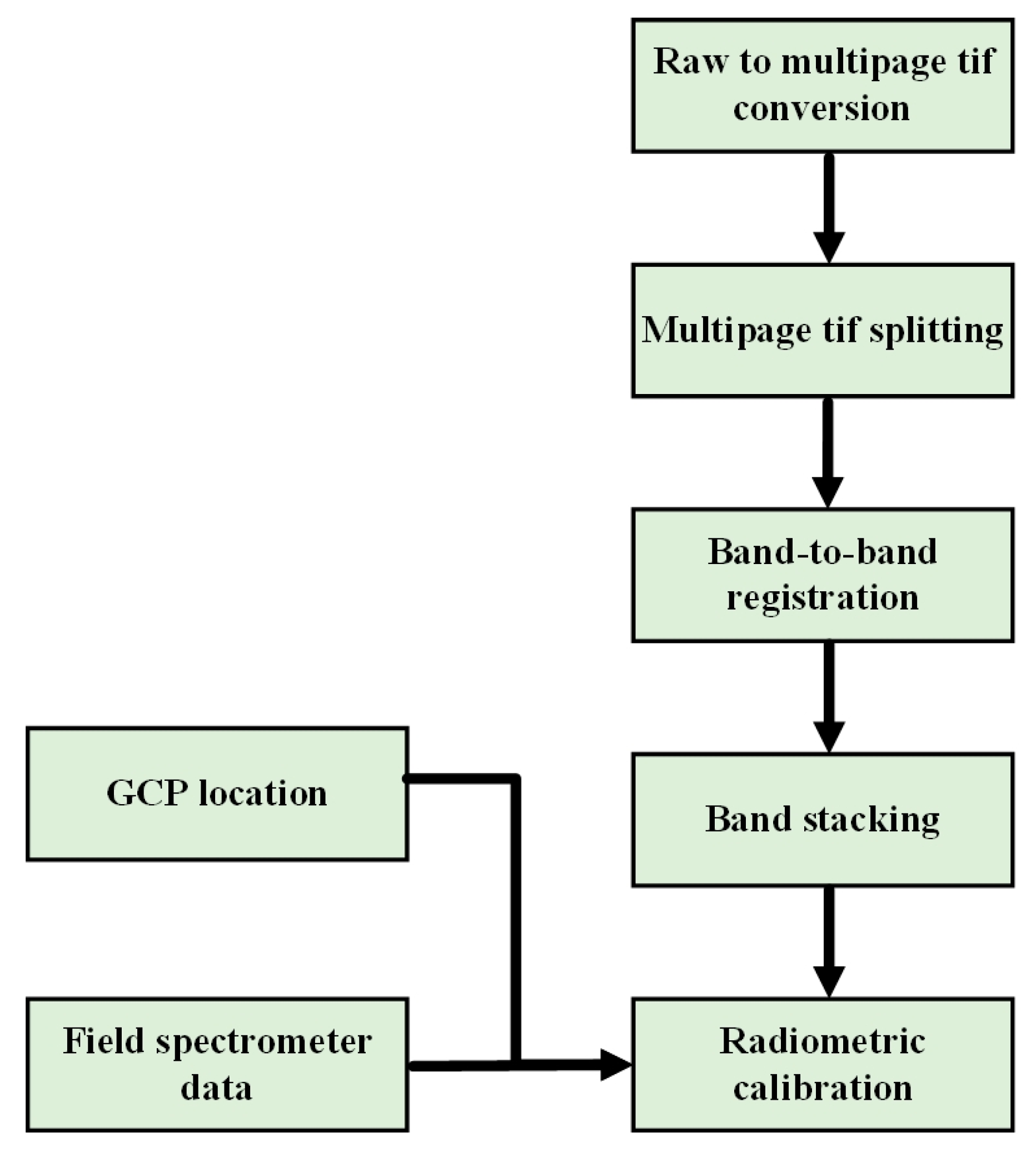
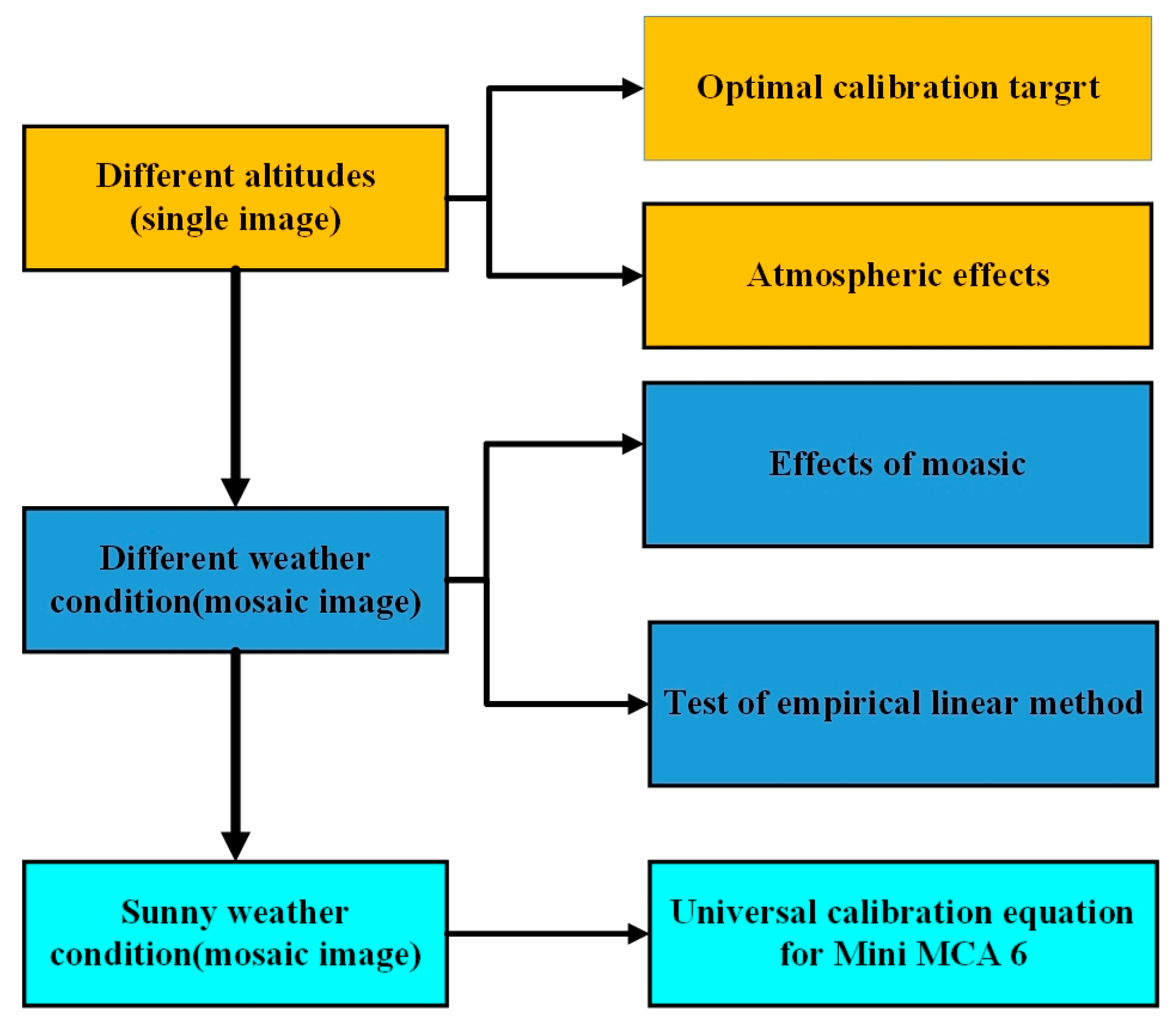
In this paper, the empirical line method, in particular, the LRM approach is adopted to calibrate and validate the multispectral images acquired from the Mini MCA 6 camera mounted on a fixed-wing UAV platform. The images are acquired from different altitudes and in varied weather conditions. The relationship developed by using pseudo photo targets is used to convert DN values of images to surface reflectance for obtaining a radiometric calibration of UAV-based images. The entire study was performed through a series of experiments, and the main necessities are: (1) confirming the optimal selection of calibration targets and identifying the atmospheric effects collected by UAV sensors from different altitudes; (2) evaluating the effects of mosaic and testing with the LRM considering different weather conditions; and (3) developing a universal calibration equation and validating the effectiveness.
The remaining content of the paper is written as follows.
Section 2 discusses the materials and methods.
Section 3 discusses the results obtained using radiometric calibration.
Section 4 elaborates the discussion of the radiometric calibration. This paper is concluded in
Section 5.
4. Discussion
In agricultural and ecological related applications using the multispectral images acquired from low altitudes of a UAV platform, the camera effects and atmospheric correction are always neglected and are merely mentioned. Before our research, some applications just mentioned that their images were calibrated into reflectance with the precision of calibration unknown, commonly, with no or little professional calibration targets. Furthermore, some studies have involved calibrations using a laboratory calibration method, which is quite difficult to perform in field calibrations.
In this research, a quick and precise radiometric calibration method was proposed and adopted. To exclude the errors from Lambertian effects, the linear Lambertian calibration targets were adopted. In previous studies, the usage of calibration targets is not set. The adoption of calibration targets is an uncertainty due to different applications and scenes. In agricultural and ecological applications, the common study object is vegetation. The reflectance would possibly change with the wavelength. However, related researches were only conducted in satellite-based images. Therefore, we need to know how the selection of calibration targets influences the calibration results. In UAV-based applications, an optimal combination use of multi calibration targets was confirmed in agricultural applications.
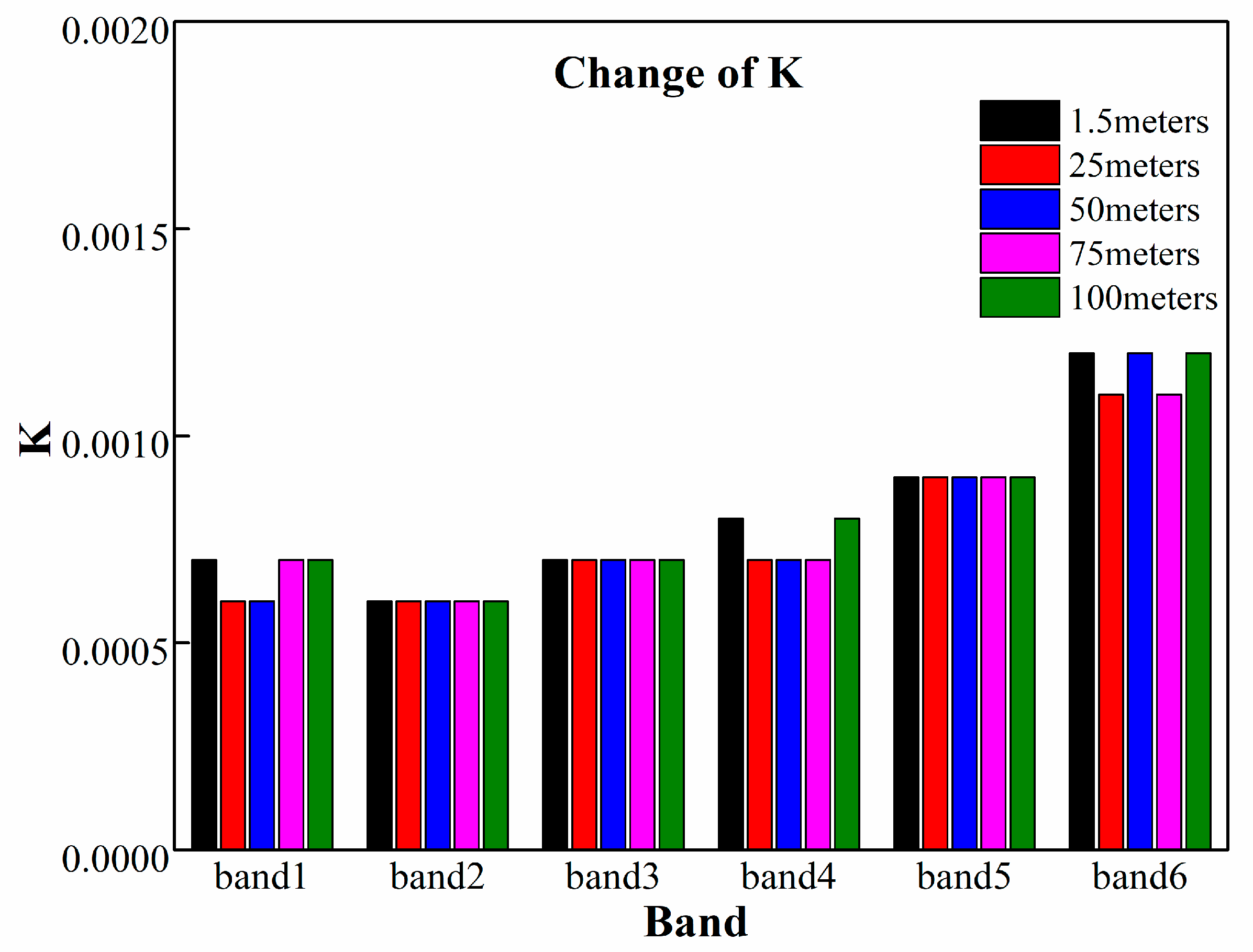
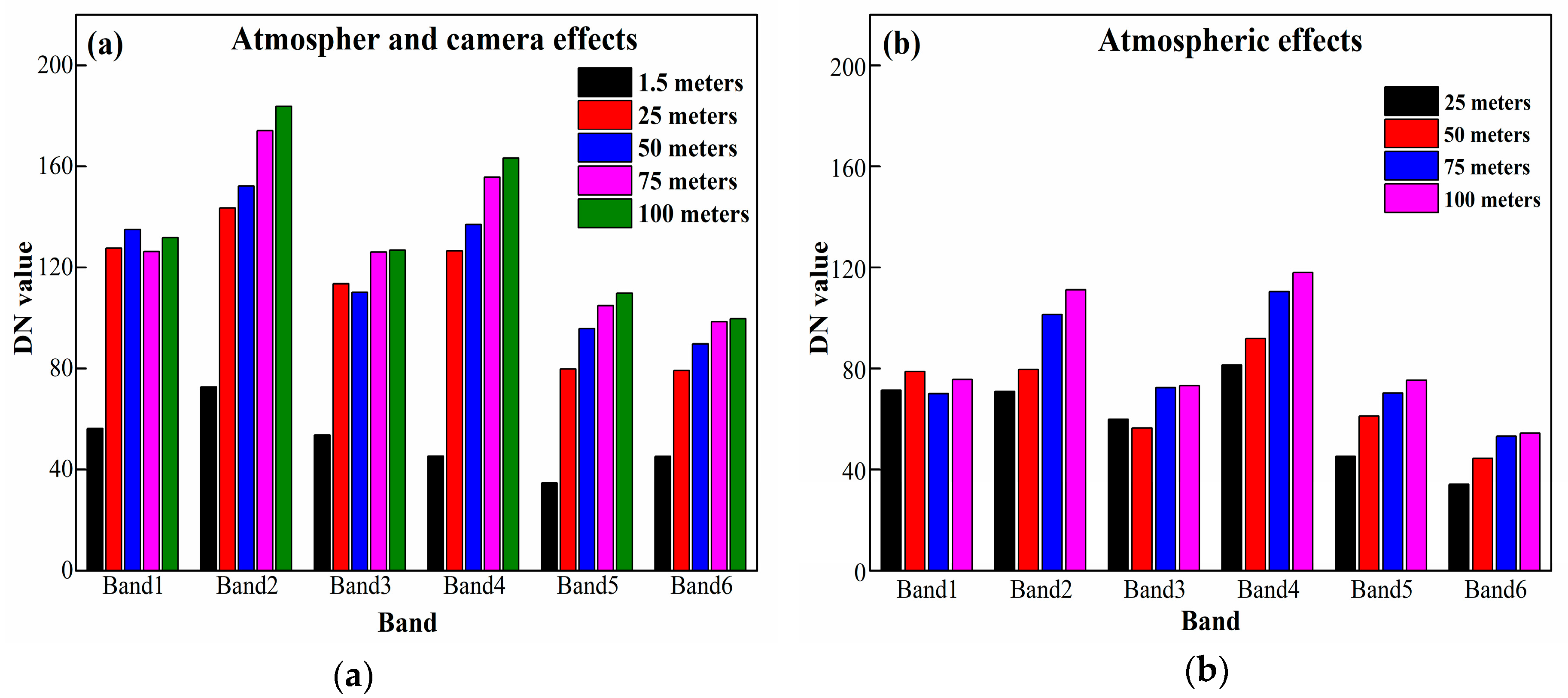
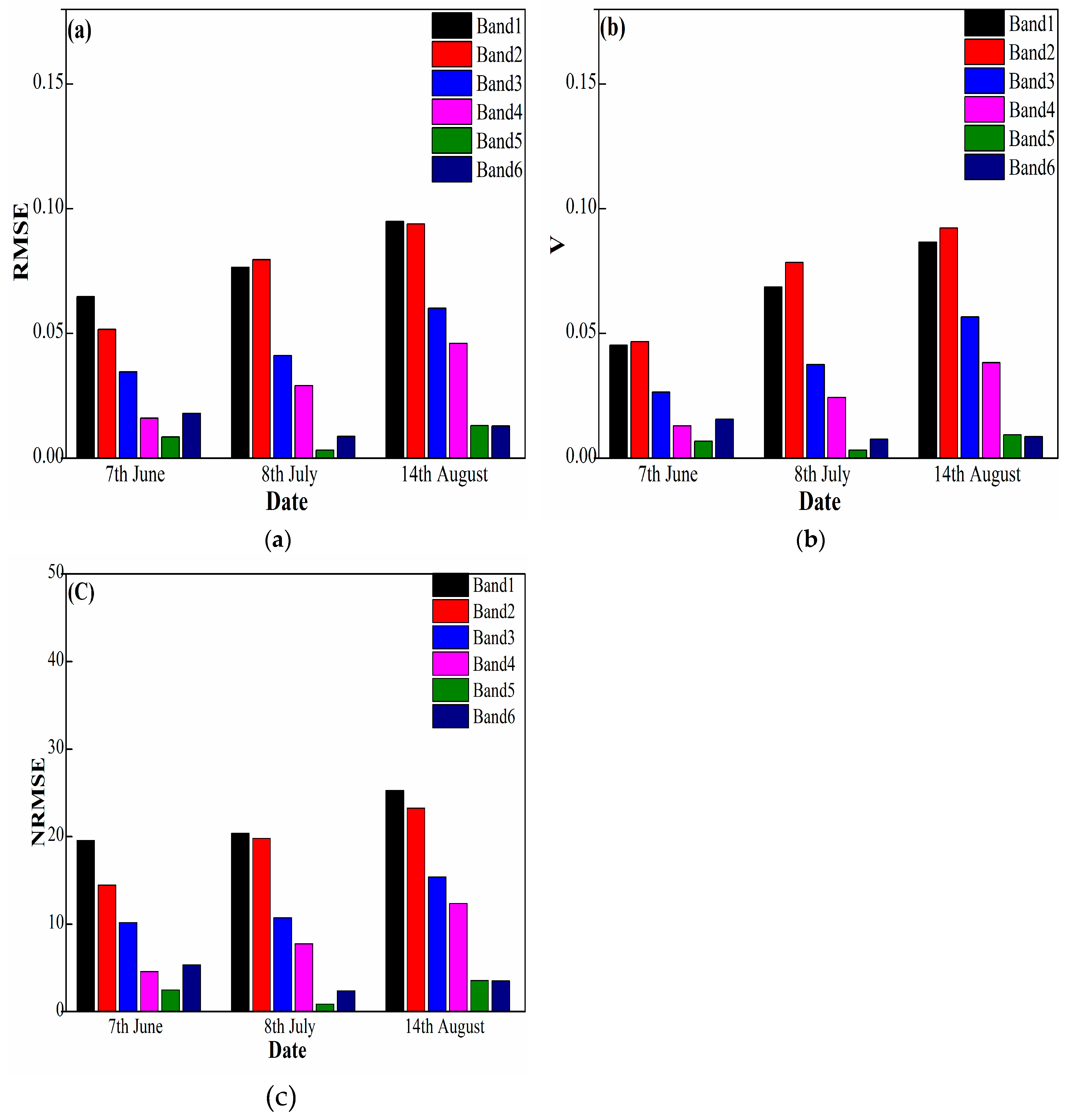
The atmospheric effects were commonly neglected due to the little impacts. However, the real effects to the calibrations are unknown. Therefore, we assessed the atmospheric effects caused by cloud by assessing the calibration results from different flight altitudes. We have found that the atmospheric effects within 100 m of flight altitudes only contributes a little to the DN values. And from
Figure 11, it can be obtained that the effects to different bands are totally different, the results show overall the effects are decreasing from band 1 to band 6. This is likely because the longer the wavelength, the more power the wavelength would possibly contain. In total, as the atmospheric effects are quite small, they can be neglected as the precision is already satisfactory in agricultural and ecological related calibrations.
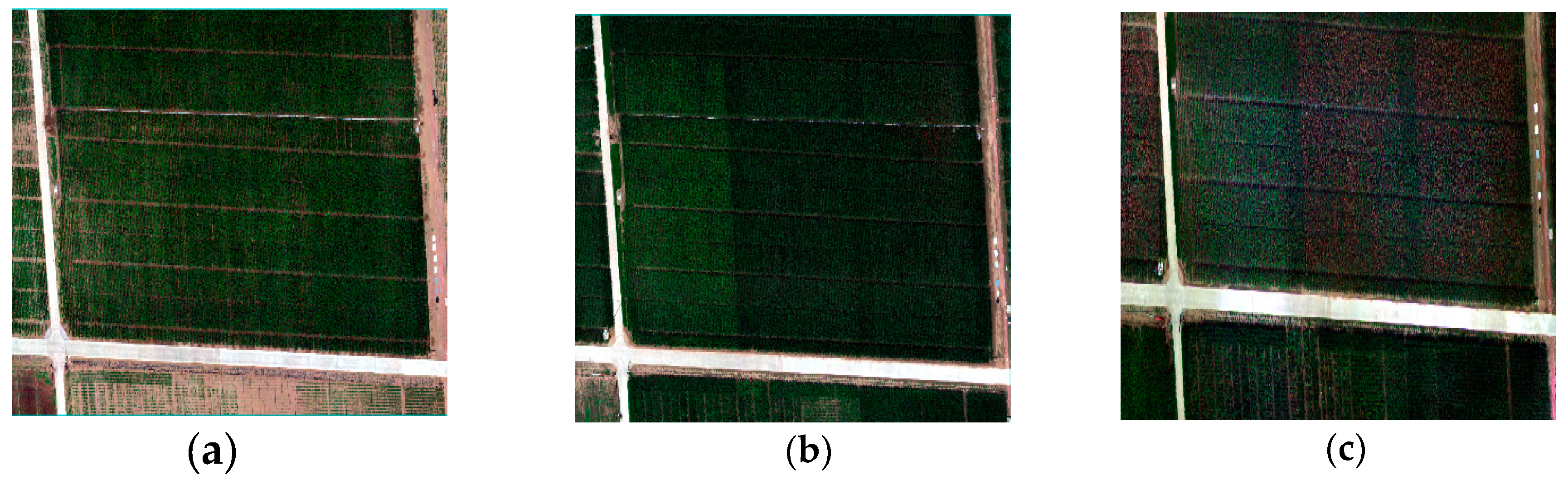
Images from different weather conditions were merely mentioned in previous studies. So far, we do not know if the images can be used for further research from bad weather conditions, such as cloud. The apparent reflectance will be different for the same object in different weather conditions. We want to find out the effects of different weather conditions, and how much it will influence the radiometric calibration. We applied the radiometric calibration with the same method, calibration and validation targets. The calibration results of a sunny day and with little cloud indicate that the calibrated reflectance could be used for further research. While for the day with more cloud, we found that we cannot use the images from this weather condition, because the reflectance measured from an ASD showed a 20% decline compared with reflectance acquired on a sunny day.
So far, there has never been a universal calibration equation for this camera. Therefore, a universal calibration equation should be given and assessed. The results show that a universal calibration equation could be well used in similar imaging conditions. It is quite satisfactory to perform radiometric calibration in agricultural and ecological applications. For example, if a series of experiments conducted over a few days and in similar weather conditions and imaging environment, the acquisition of reflectance from the calibration targets might be reduced, which is a real problem in field data collection. The adoption of this universal calibration equation has proposed an innovative idea for quick radiometric calibration, meanwhile, saving much time and human power.
Even though the series of radiometric calibration were conducted under a strict procedure, there are also uncertainties from three main approaches: (1) linear regression method, (2) error from ASD, (3) Lambertian properties of the calibration target. First, the DN values are considered to have a linear relationship with reflectance measured from the same ROI in the LRM. However, the linear relationship is not always true for all circumstances. In this study, the precision of radiometric calibration is very high. Therefore, the DN and reflectance have a linear relationship within Mini MCA 6 camera with professional calibration targets. Future studies should explore the relationship between DN value and reflectance with infrared and near-infrared bands, which seems to have a quadratic or index relationship. Second, the error from ASD can be divided into two aspects: measurement error and resample error. Even though the Handheld2 is a professional instrument which can be used to record the spectral properties of objects, the instrument still has some limitations, such as, before each measurement the calibration should be strictly performed for the Handheld2. To keep it on par with the sunlight, the calibration is commonly done every five minutes. Therefore, there are uncertainties in this. Moreover, the spectral response function is only an approximate representation of the response of the camera to each wavelength. Third, the Lambertian properties of the calibration target will also influence the results, making the results less reliable. Therefore, to explore the effects of Lambertian properties, the BRDF correction should be considered in future experiments.
5. Conclusions
This paper describes a radiometric calibration technique using the linear regression method for calibrating images acquired by a Mini MCA 6 sensor mounted on a UAV platform. The images are acquired in two forms: single images and mosaic images and are acquired from different altitudes and in different weather conditions. A list of useful conclusions is observed from the series of radiometric calibration.
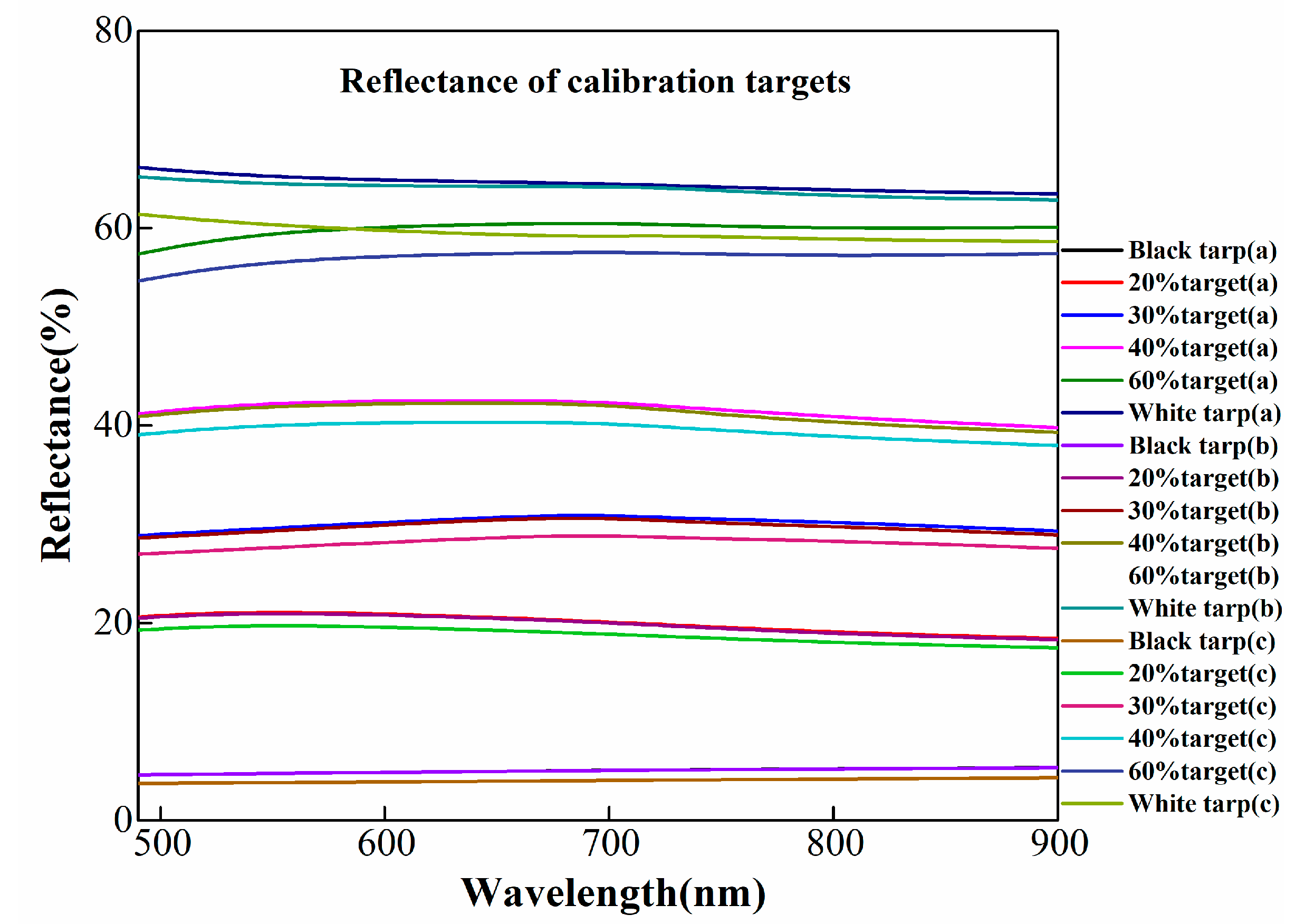
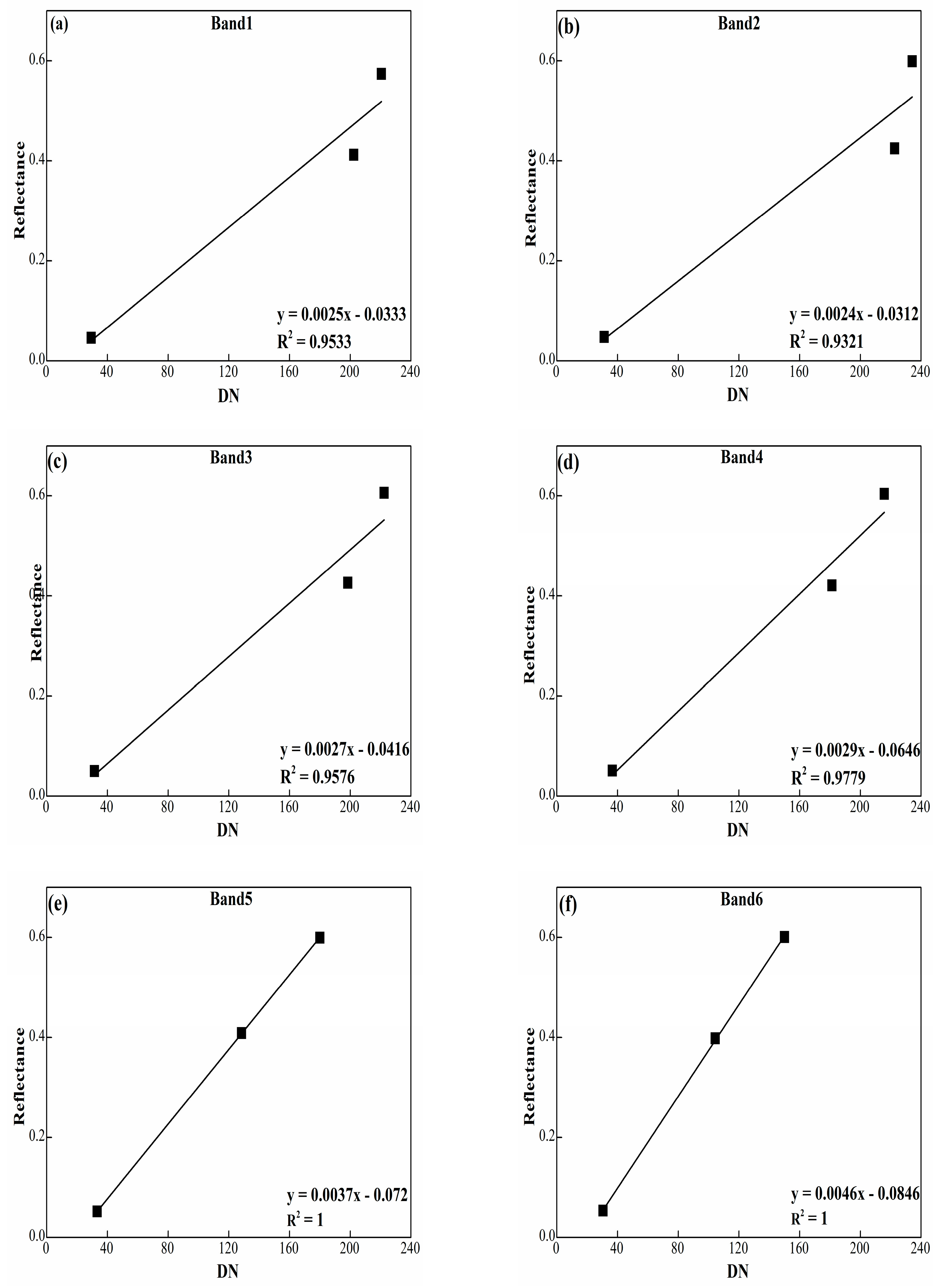
First, for the experiment of single images acquired from different flight altitudes, two main aspects were assessed: the optimal selection of calibration targets, and atmospheric effects. The results show that three calibration targets containing dark, moderate, and white calibration targets are possibly the best for the radiometric calibration of the Mini MCA 6 sensor. In addition, the atmospheric effects grow with an increase in flight altitude. However, the effects under 100 m are moderately low (1.5%) compared with the reflectance of ground calibration targets. Therefore, the atmospheric effects on a sunny day will have little effect. With the effectiveness of acquiring images and spatial resolution, a flight altitude of 50 m is suggested.
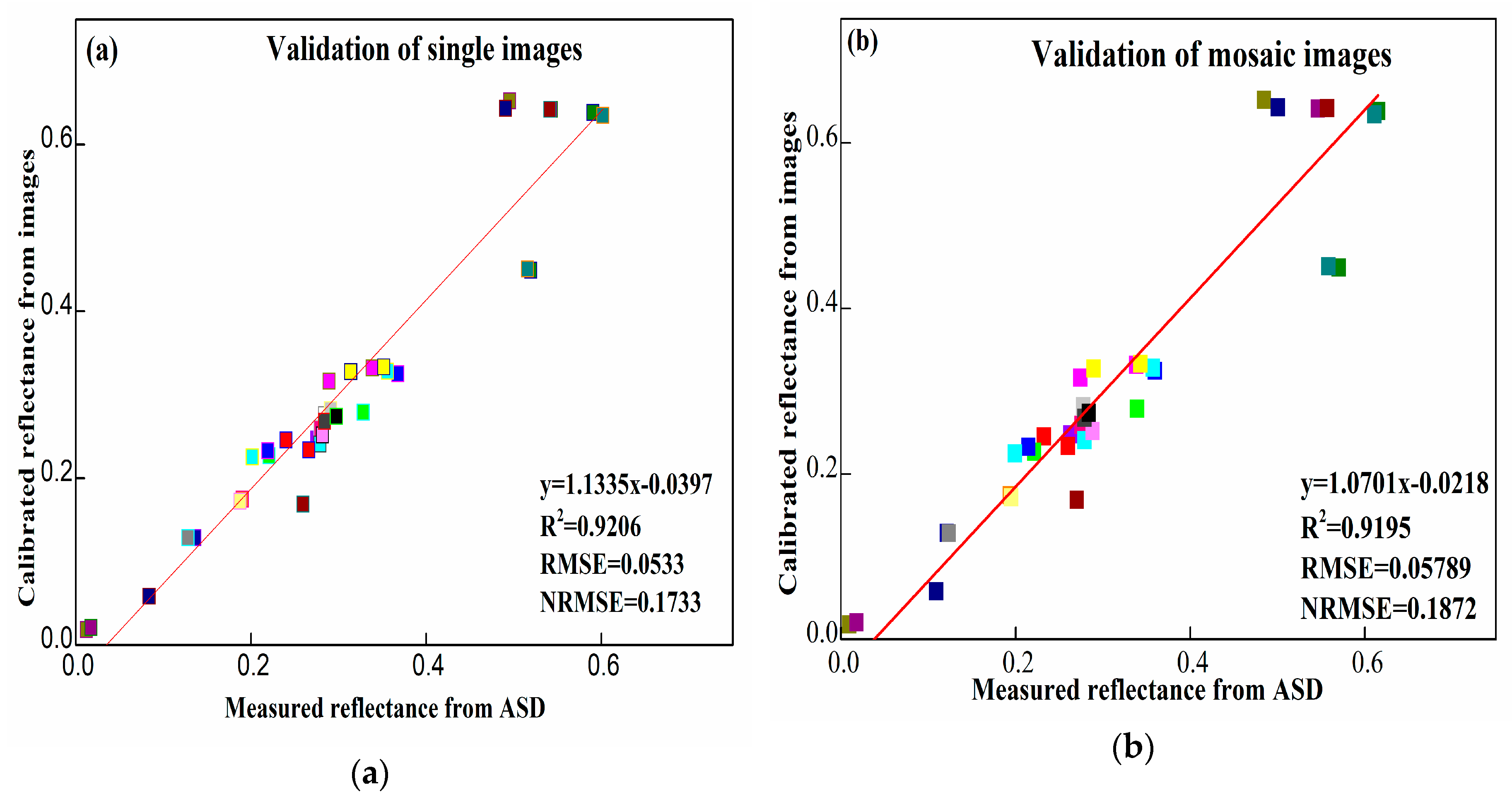
Second, another experiment was conducted using the mosaic images acquired on three days of different weather conditions. The RMSE of mosaic effects was 0.057 in comparison to single image effects of 0.053. The result indicates that the effects of the mosaic are little enough to not be considered when applying calibrations. Through the exclude of effects of mosaic, the mosaic images were each calibrated using the images and measured calibration targets reflectance from the same day. The LRM was successfully used to calibrate the images acquired from a sunny day, a little cloudy day, and cloudier day.
Third, a universal calibration equation for Mini MCA 6 was obtained from a sunny day and then validated using multispectral images from little cloudy and more cloud. The results show that in low flight altitudes, the universal calibration equation for Mini MCA 6 can be applied, and has obtained high precision calibration during a sunny day and a little cloud day. This study provides a standard procedure for acquiring and calibrating multispectral images in agricultural and ecological applications.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}