Evaluation of Two Improved Schemes at Non-Aligned Intersections Affected by a Work Zone with an Entropy Method

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Literature Review
2.1. Highway Work Zone Impact
2.2. Predict and Evaluate Method of Highway Work Zone Impact
2.3. Urban Roads and Subway Work Zone
2.4. Methods for Work Zone Impact Research
3. Problem Statement and Data Collection
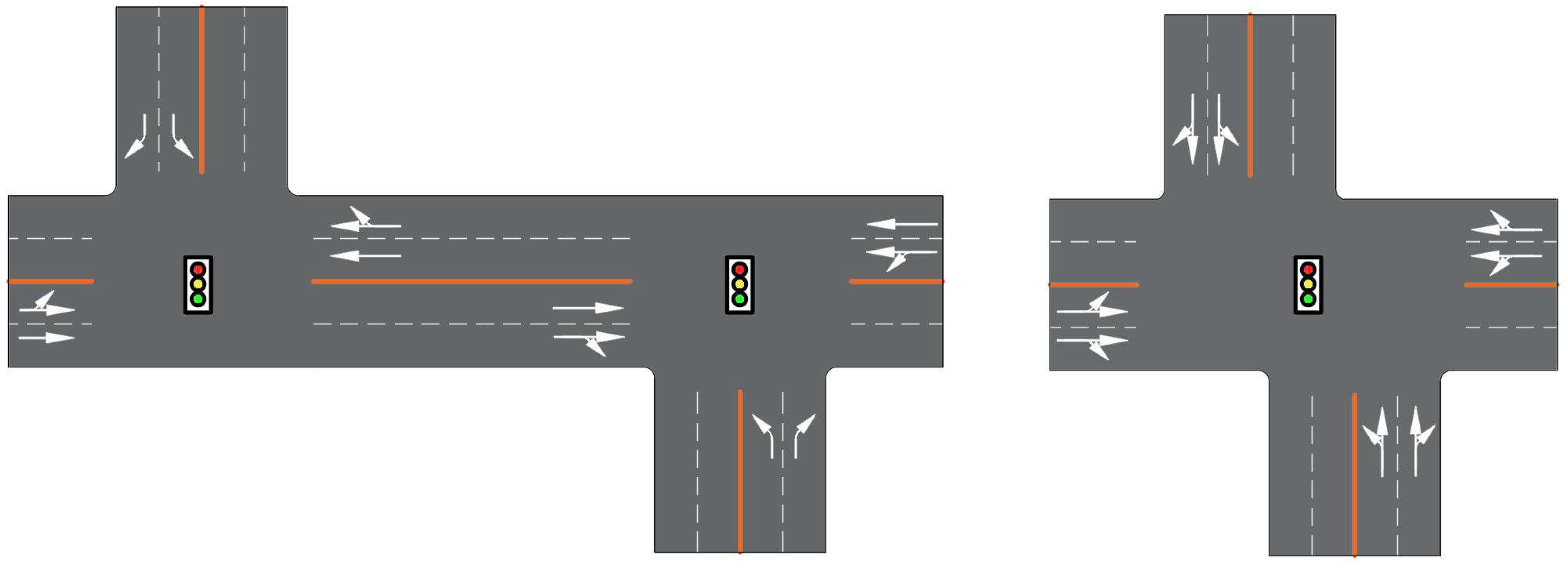
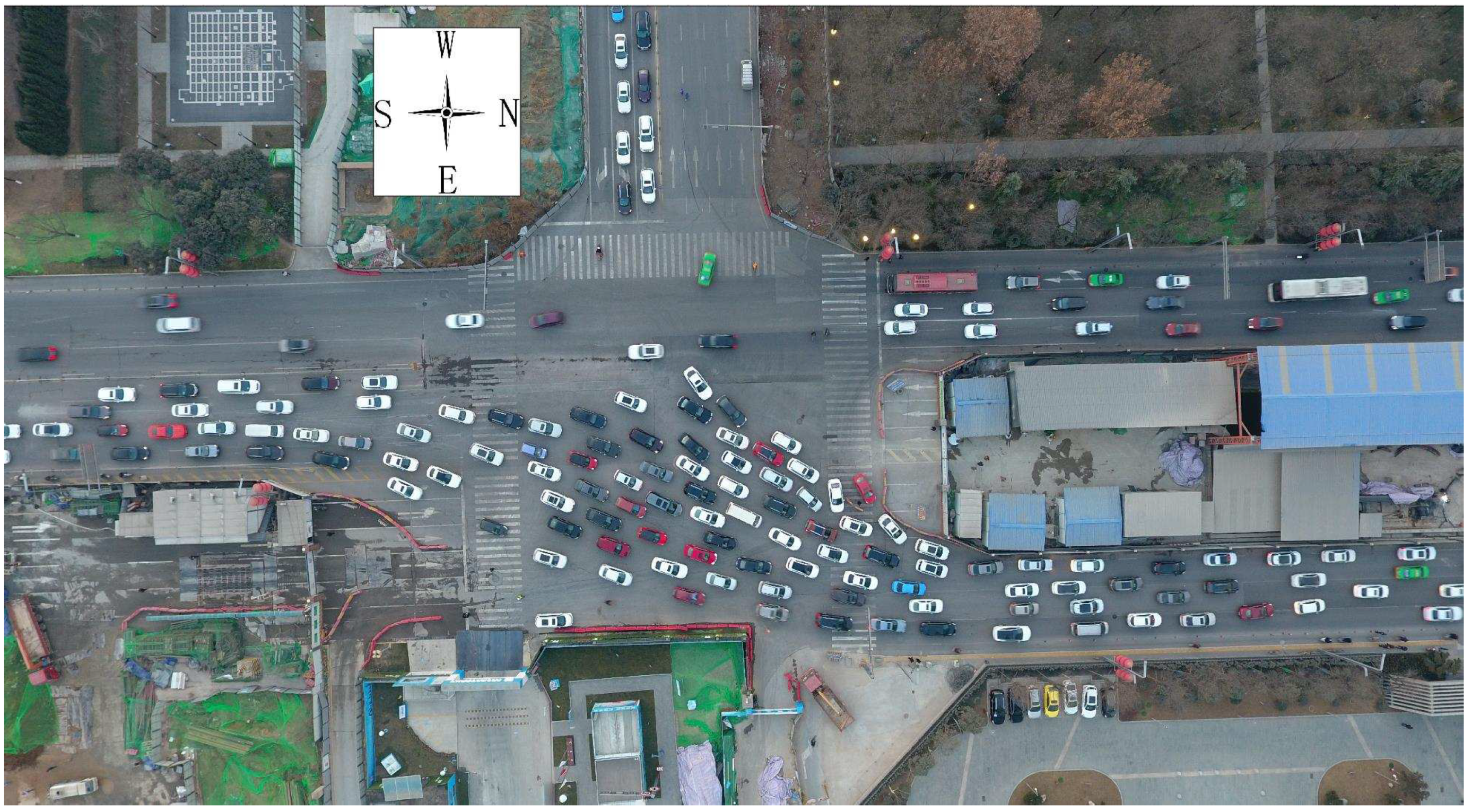
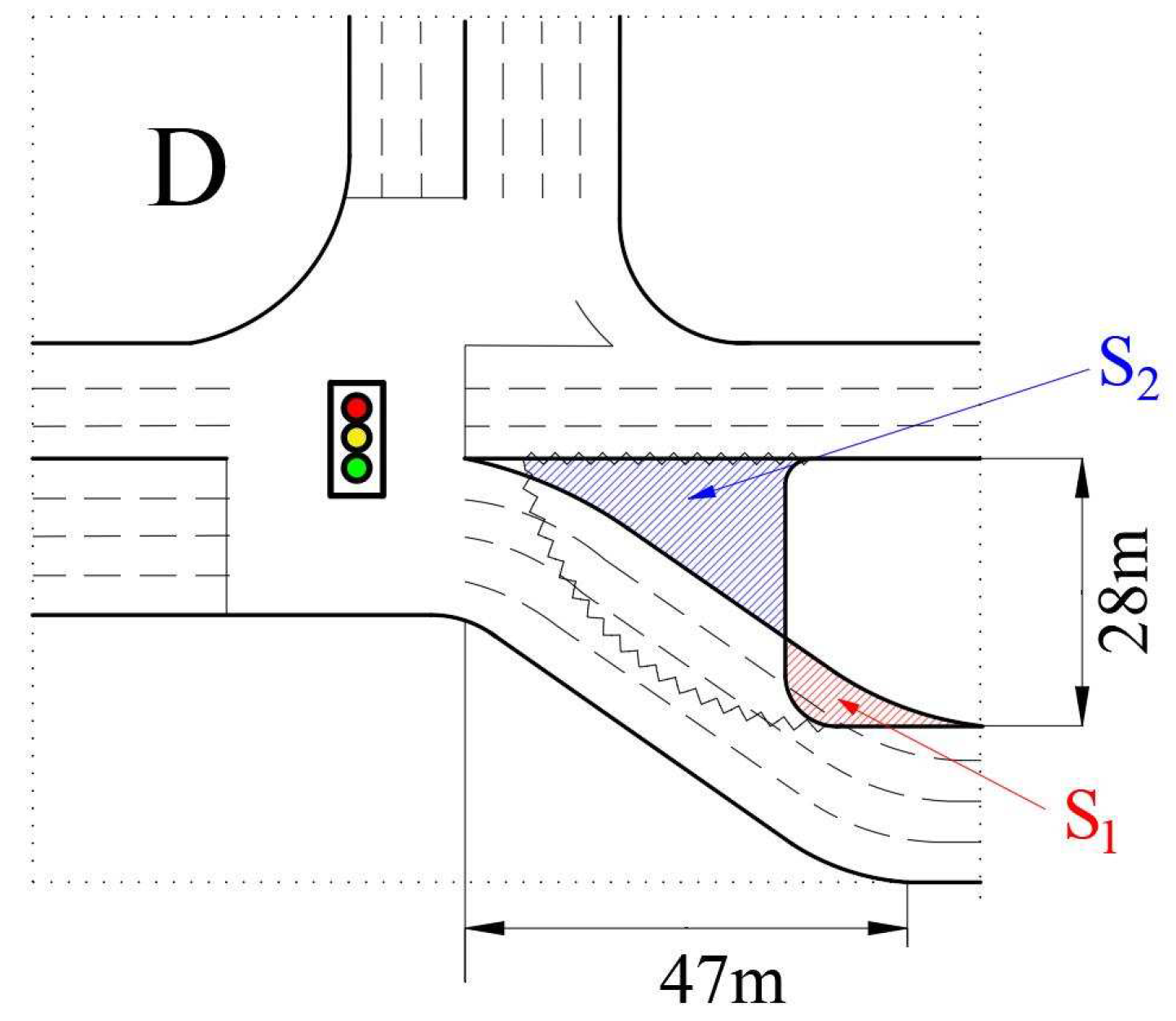
3.1. Problem Statement
3.2. Data Collection
- Speed and types of vehicles in each lane;
- Turning vehicles, including left turns and right turns;
- Vehicle behavior in the intersection area, especially the South–North vehicle chaos.
- 1.
- The average speed of Flow was much higher than that of Flow , and the offset of trajectories strongly affected vehicle operation.
- 2.
- Neither Flow nor Flow was affected by the offset.
- 3.
- The collector street volume was much less than the arterial street volume, the operation of which was hardly affected by the offset.
- 1.
- Northbound vehicles (Flow ) were crowded in the intersection area, whereas the Southbound (Flow ) and Westbound (Flow ) vehicles were hardly affected.
- 2.
- Lane D is a left-turn lane, but through-vehicles used it when other lanes were crowded.
- 3.
- Lane E is a right-turn lane, but left-turn vehicles used it when other lanes were crowded, and some of the left-turn vehicles of lane E detoured via the outside route to avoid the queue.
- 4.
- The outside vehicles operated faster than the inside vehicles; the inside vehicles needed to merge with other vehicles, which caused the delay.
- 5.
- According to the investigation, vehicles of lane G preferred to turn left with a small radius, which was the inside lane when turning left. However, all inner five or six lines of the vehicles had to merge into only one single lane, and because it was difficult to change to the adjacent lane, the inner vehicles moved very slowly. On the basis of observation, the longest time taken by a vehicle of Flow to pass through the intersection was about 6 min.
3.3. Calibration of the VISSIM Simulation Model
3.4. VISSIM Calculation of Operational Measures
4. Solutions and Analysis
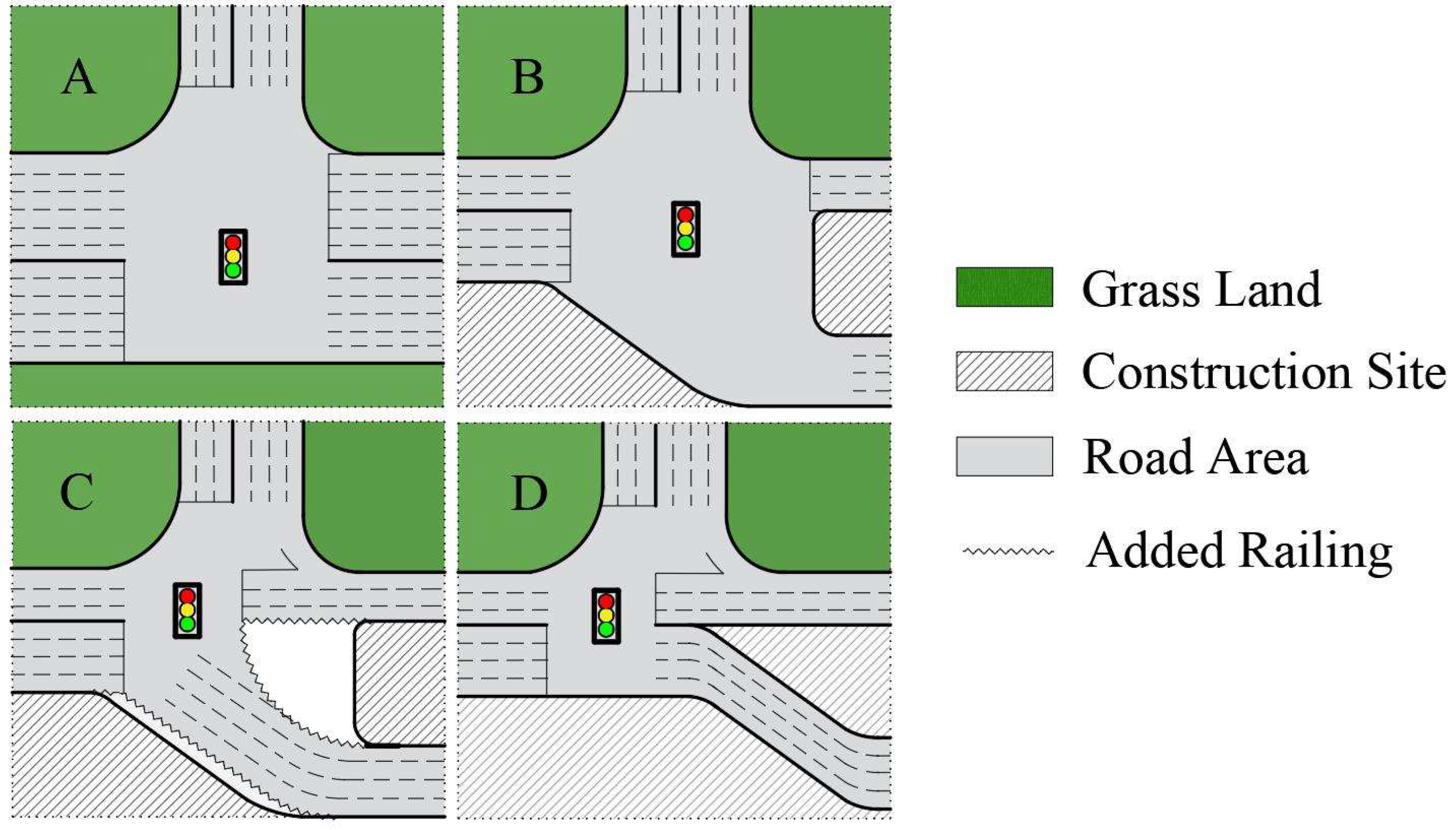
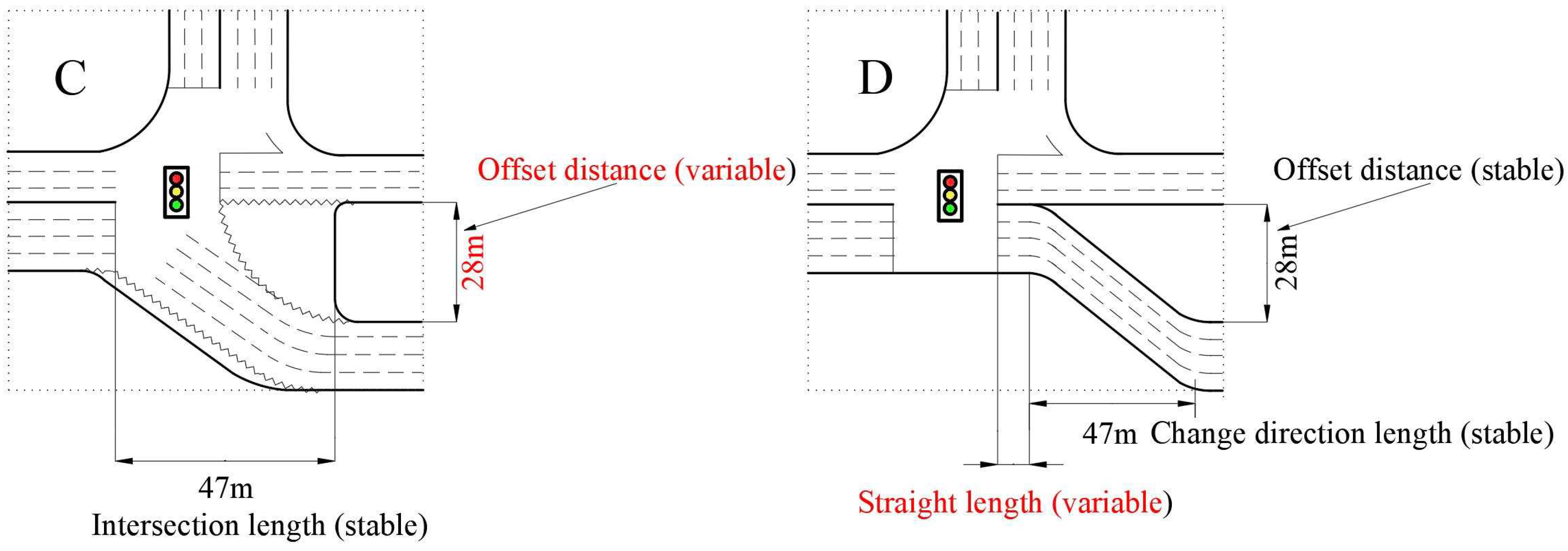
4.1. Solutions
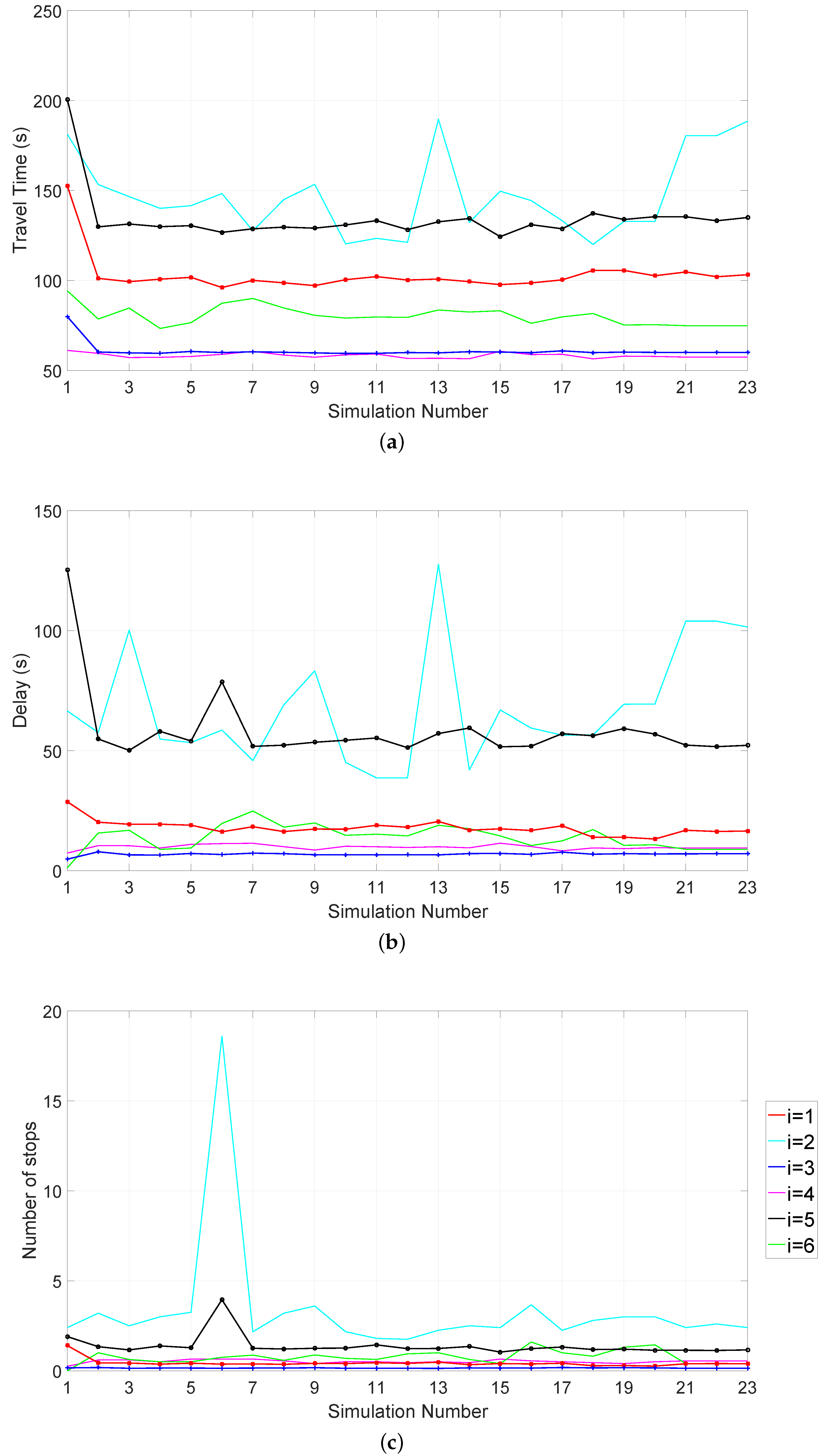
4.2. Simulation Result
4.3. Safety Evaluation
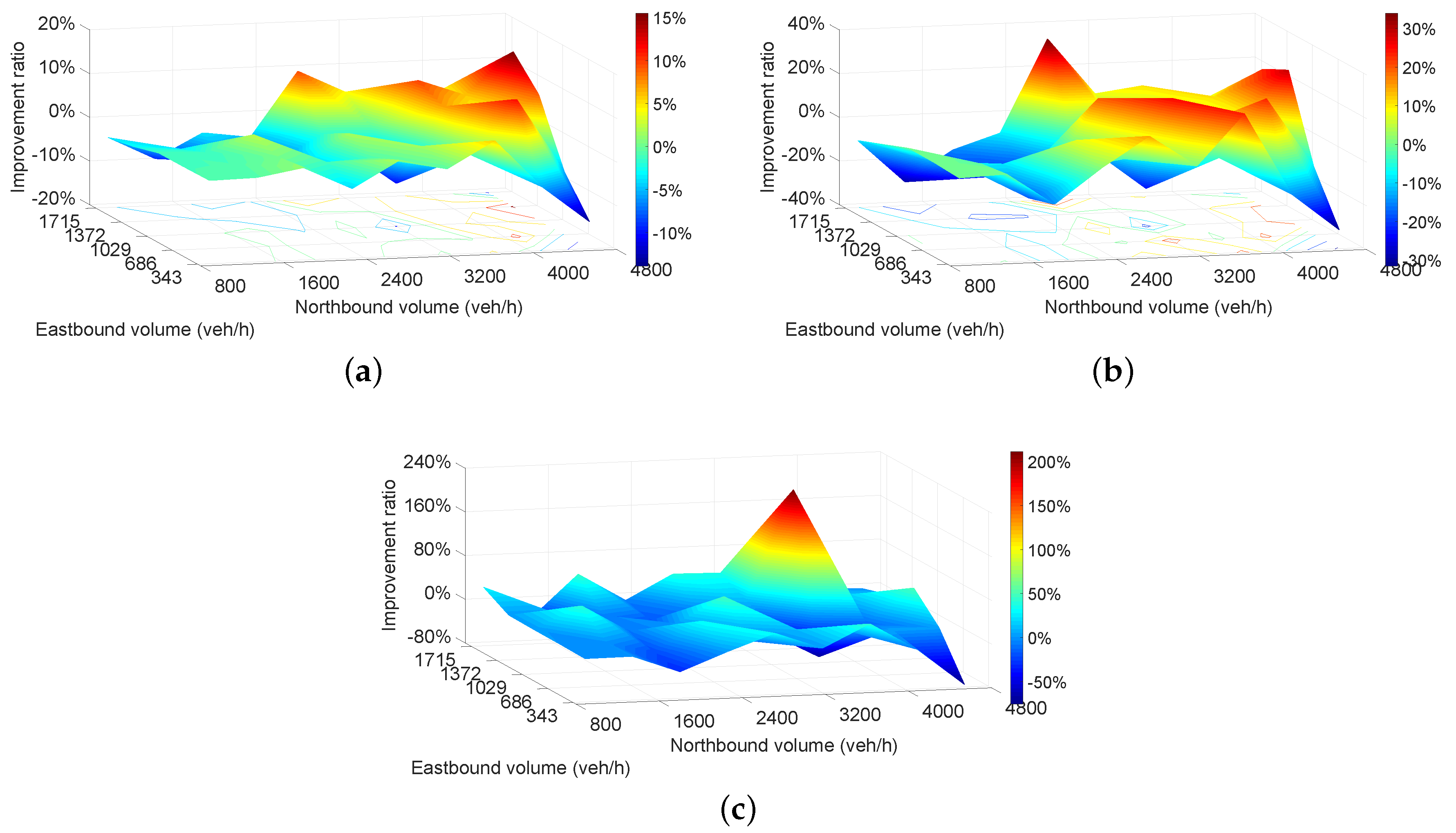
4.4. Sensitivity Analysis of Operational Performance
5. Results
5.1. Weight of Three Indexes
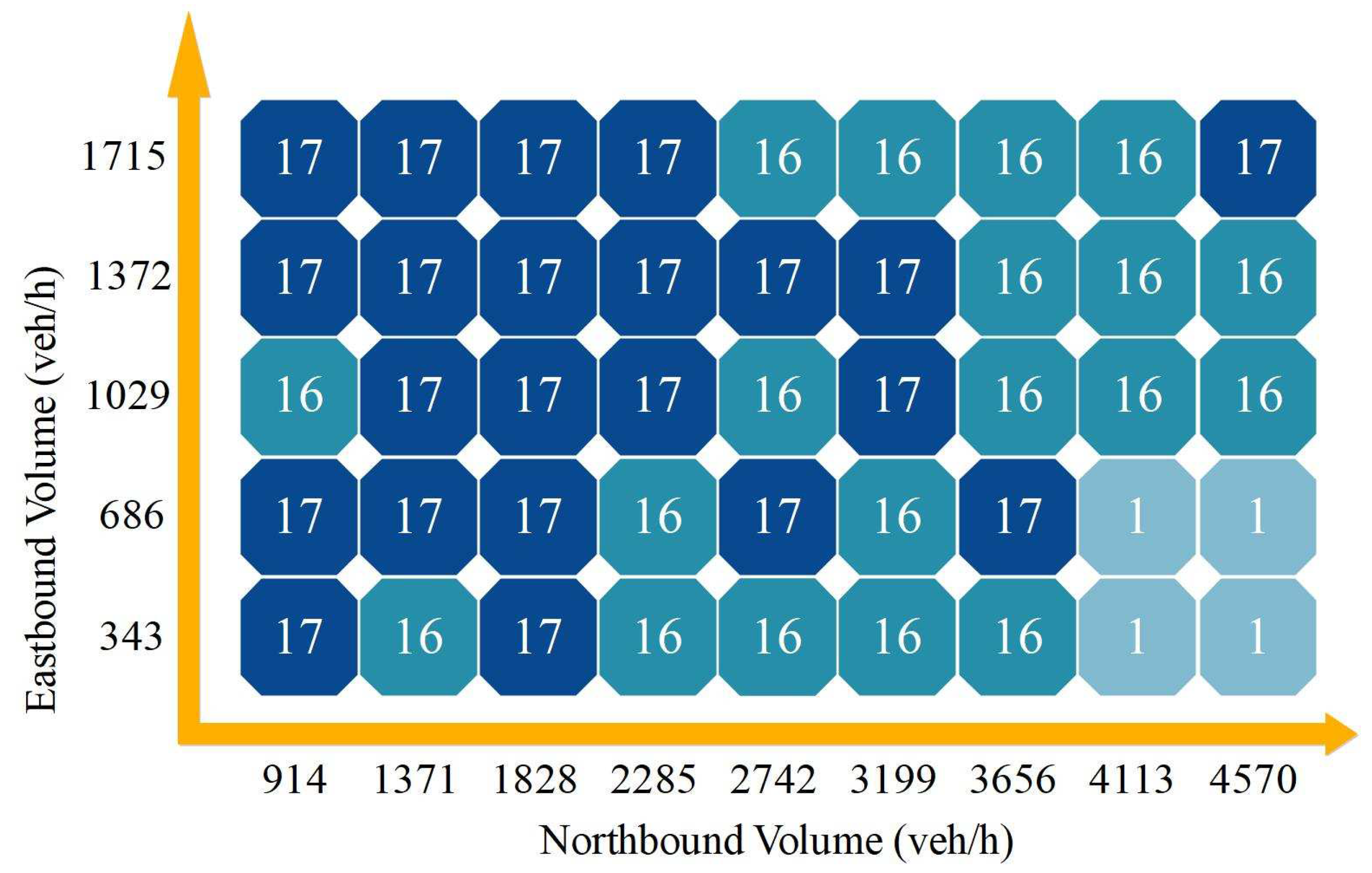
5.2. Schemes Comparison
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xue, Y.; Cao, X.; Ai, Y.; Xu, K.; Zhang, Y. Primary Air Pollutants Emissions Variation Characteristics and Future Control Strategies for Transportation Sector in Beijing, China. Sustainability 2020, 12, 4111. [Google Scholar] [CrossRef]
- Wang, J.; Lu, H.; Sun, Z.; Wang, T.; Wang, K. Investigating the Impact of Various Risk Factors on Victims of Traffic Accidents. Sustainability 2020, 12, 3934. [Google Scholar] [CrossRef]
- Baghestani, A.; Tayarani, M.; Allahviranloo, M.; Gao, H.O. Evaluating the Traffic and Emissions Impacts of Congestion Pricing in New York City. Sustainability 2020, 12, 3655. [Google Scholar] [CrossRef]
- Leong, L.V.; Vivian, W.W.L.; Wins, C.G. Effects of Short Exit Lane on Gap-Acceptance and Merging Behavior of Drivers Turning Right at Unconventional T-Junctions. Int. J. Civ. Eng. 2020, 18, 19–36. [Google Scholar] [CrossRef]
- Zlatkovic, M.; Zlatkovic, S.; Sullivan, T.; Bjornstad, J.; Shahandashti, S.K. Assessment of effects of street connectivity on traffic performance and sustainability within communities and neighborhoods through-traffic simulation. Sustain. Cities Soc. 2019, 46, 101409. [Google Scholar] [CrossRef]
- Hamurcu, M.; Eren, T. Strategic planning Based on Sustainability for Urban Transportation: An Application to Decision-Making. Sustainability 2020, 12, 3589. [Google Scholar] [CrossRef]
- Cai, Q.; Mohamed, A.A.; Jaeyoung, L.; Wang, L.; Wang, X.S. Developing a grouped random parameters multivariate spatial model to explore zonal effects for segment and intersection crash modeling. Anal. Methods Accid. Res. 2018, 19, 1–15. [Google Scholar] [CrossRef]
- Echab, H.; Lahouari, N.; Ez-Zahraouy, H.; Benyoussef, A. Phase diagram of a non-signalized T-shaped intersection. Phys. A Stat. Mech. Appl. 2016, 461, 674–682. [Google Scholar] [CrossRef]
- Zhang, W.; Kronprasert, N.; Gustafson, J. Unclog Local Network Congestion Using High Capacity Mini-Roundabout: A Feasibility Study. In Proceedings of the Transportation Research Board Meeting, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Mohamed, A.I.Z.; Ci, Y.S.; Tan, Y.Q. A Novel Methodology for Estimating the Capacity and Level of Service for the New Mega Elliptical Roundabout Intersection. J. Adv. Transp. 2020, 2020, 8467152. [Google Scholar] [CrossRef] [Green Version]
- Jaepil, M.; Kim, Y.; Kim, D.; Lee, S. The potential to implement a superstreet as an unconventional arterial intersection design in Korea. Ksce J. Civ. Eng. 2011, 15, 1109–1114. [Google Scholar]
- Wonho, S.; Michael, H. Signal design for displaced left-turn intersection using Monte Carlo method. KSCE J. Civ. Eng. 2014, 18, 1140–1149. [Google Scholar]
- Zhao, J.; Ma, W.J.; Zhang, H.M.; Yang, X.G. Increasing the Capacity of Signalized Intersections with Dynamic Use of Exit Lanes for Left-Turn Traffic. Transp. Res. Rec. 2013, 2355, 49–59. [Google Scholar] [CrossRef]
- Tang, T.Q.; Zhang, J.; Liu, K. A speed guidance model accounting for the driver’s bounded rationality at a signalized intersection. Phys. A Stat. Mech. Appl. 2017, 473, 45–52. [Google Scholar] [CrossRef]
- Jenelius, E.; Haris, N.K. Travel time estimation for urban road networks using low frequency probe vehicle data. Transp. Res. Part B Methodol. 2013, 53, 64–81. [Google Scholar] [CrossRef] [Green Version]
- Shao, Y.; Han, X.Y.; Wu, H.; Claudel, C.G. Evaluating Signalization and Channelization Selections at Intersections Based on an Entropy Method. Entropy 2019, 21, 808. [Google Scholar] [CrossRef] [Green Version]
- Shao, Y.; Han, X.Y.; Wu, H.; Shan, H.M.; Yang, S.W.; Claudel, C.G. Evaluating the sustainable traffic flow operational features of an exclusive spur dike U-turn lane design. PLoS ONE 2019, 14, e0214759. [Google Scholar] [CrossRef]
- Mahmoud, T.; Akmal, S.A. Impact of using indirect left-turns on signalized intersections’ performance. Can. J. Civ. Eng. 2017, 44, 462–471. [Google Scholar]
- Sun, W.L.; Wu, X.K.; Wang, Y.P.; Yu, G.Z. A continuous-flow-intersection-lite design and traffic control for oversaturated bottleneck intersections. Transp. Res. Part C Emerg. Technol. 2015, 56, 18–33. [Google Scholar] [CrossRef]
- Narayana, R.; Shriniwas, S.A.; Gaurang, J. Effect of Construction Work Zone on Traffic Stream Parameters Using Vehicular Trajectory Data under Mixed Traffic Conditions. J. Transp. Eng. Part A Syst. 2020, 146, 05020002. [Google Scholar]
- Didier, V.; Carla, L.D.P.; Benjamin, C.; Alberto, F.; Ricardo, G.R.; Enid, C.T.; Maria, X.R.I. Comparative Analysis between Distracted Driving Texting Laws and Driver’s Behavior in Construction Work Zones. J. Leg. Aff. Disput. Resolut. Eng. Constr. 2019, 11, 04519026. [Google Scholar]
- Lu, C.; Dong, J.; Sharma, A.; Huang, T.; Knickerbocker, S. Predicting Freeway Work Zone Capacity Distribution Based on Logistic Speed-Density Models. J. Adv. Transp. 2018, 2018. [Google Scholar] [CrossRef]
- Bing, Z.; Bingjie, Z. Evaluation of Traffic Organization Scheme during the Construction of Urban Subway Station based on TransCAD. Appl. Mech. Mater. 2014, 505–506, 433–436. [Google Scholar]
- Huang, Y.; Bai, Y. Driver responses to graphic-aided portable changeable message signs in highway work zones. J. Transp. Saf. Secur. 2019, 11, 661–682. [Google Scholar] [CrossRef]
- Nawaf, M.A.; Elena, P. Impact Assessment of Short-Term Work Zones on Intersection Capacity in New York City. Transp. Res. Rec. 2018, 2672, 1–8. [Google Scholar]
- Zhang, K.; Hassan, M. Crash severity analysis of nighttime and daytime highway work zone crashes. PLoS ONE 2019, 14, e0221128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pesti, G.; Chu, C.L.; Balke, K.; Shelton, J.; Zeng, X.; Chaudhary, N. Regional Impact of Roadway Construction on Traffic Operations. Transp. Res. Rec. 2012, 2272, 56–66. [Google Scholar] [CrossRef]
- Zhang, C.; Qin, J.; Zhang, M.; Zhang, H.; Hou, Y. Practical Road-Resistance Functions for Expressway Work Zones in Occupied Lane Conditions. Sustainability 2019, 11, 382. [Google Scholar] [CrossRef] [Green Version]
- Bharadwaj, N.; Edara, P.; Sun, C.; Brown, H.; Chang, Y. Traffic Flow Modeling of Diverse Work Zone Activities. Transp. Res. Rec. 2018, 2672, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Arezoo, M.; Jay, M.R.; Stephen, P.M.; James, C.W.; Hossein, H. An optimization based traffic diversion model during construction closures. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 1087–1099. [Google Scholar]
- Fei, L.; Zhu, H.B.; Han, X.L. Analysis of traffic congestion induced by the work zone. Phys. A Stat. Mech. Appl. 2016, 450, 497–505. [Google Scholar] [CrossRef]
- Yun, Y.; Yue, L.; Weiyan, L. Dynamic Lane-Based Signal Merge Control for Freeway Work Zone Operations. J. Transp. Eng. Part A Syst. 2019, 145, 04019053. [Google Scholar] [CrossRef]
- Schroeder, B.J.; Nagui, M. Rouphail. Estimating Operational Impacts of Freeway Work Zones on Extended Facilities. Transp. Res. Rec. 2010, 2169, 70–80. [Google Scholar] [CrossRef]
- Zheng, H.; Sun, Z.; Chen, X. Evaluation on Traffic Guidance Plan during Construction Period based on Vissim Simulation. In Proceedings of the 2017 International Conference on Computer Network, Electronic and Automation, Xi’an, China, 23–25 September 2017. [Google Scholar]
- Huaizhong, Z.; Shunying, Z.; Yu, W.; Shuang, D. Evaluation of Traffic Organization Scheme during Highway Reconstruction Period. Appl. Mech. Mater. 2013, 361–363, 2007–2011. [Google Scholar]
- Sze-Chum, L.; Ming, L.; Chi-Sun, P. Integration of construction and traffic engineering in simulating pipe-jacking operations in urban areas. In Proceedings of the 2011 Winter Simulation Conference, Phoenix, AZ, USA, 11–14 December 2011. [Google Scholar]
- Ravi, B.; Sewa, R.; Kayitha, R. Impact of metro rail construction work zone on traffic environment. In Proceedings of the 11th Transportation Planning and Implementation Methodologies for Developing Countries (TPMDC), Mumbai, India, 10–12 December 2014. [Google Scholar]
- Chen, X.; Lu, J.; Zhao, J.; Qu, Z.; Yang, Y.; Xian, J. Traffic Flow Prediction at Varied Time Scales via Ensemble Empirical Mode Decomposition and Artificial Neural Network. Sustainability 2020, 12, 3678. [Google Scholar] [CrossRef]
- Song, Y.; Zlatkovic, M.; Richard, J.P. Evaluation of GPS-Based Transit Signal Priority for Mixed-Traffic Bus Rapid Transit. Transp. Res. Rec. 2016, 2539, 30–39. [Google Scholar] [CrossRef]
- Stevanovic, A.; Dakic, I.; Zlatkovic, M. Comparison of adaptive traffic control benefits for recurring and non-recurring traffic conditions. IET Intell. Transp. Syst. 2017, 11, 142–151. [Google Scholar] [CrossRef]
- Kurt, D.; Peter, S. A multiagent approach to autonomous intersection management. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar]
- Stuart, T.G.; Thomas, J.T.; Brian, N.F. Driving simulator validation for speed research. Accid. Anal. Prev. 2002, 34, 589–600. [Google Scholar]
- Du, B.; Chien, S.; Lee, J.; Lazar, S.; Kyriacos, M. Artificial Neural Network Model for Estimating Temporal and Spatial Freeway Work Zone Delay Using Probe-Vehicle Data. Transp. Res. Rec. 2016, 2573, 164–171. [Google Scholar] [CrossRef]
- Harith, A.; Alireza, M.; Mohammad, R.K.S.; Haizhong, W. Measuring the impacts of connected vehicles on travel time reliability in a work zone environment: An agent-based approach. J. Intell. Transp. Syst. 2019. [Google Scholar] [CrossRef]
- Kim, K.J.; Kim, K. Case Study on the Evaluation of Equipment Flow at a work zone. J. Comput. Civ. Eng. 2010, 24, 570–575. [Google Scholar] [CrossRef]
- Zlatkovic, M.; Porter, R.J.; Kergaye, C. Performance-Based Warranty Contracts for Pavement Markings: Experience and Lessons Learned in the State of Utah. Transp. Res. Rec. 2015, 2504, 49–57. [Google Scholar] [CrossRef]
- Zhao, J.; Ma, W.; Head, K.L.; Yang, X.G. Optimal operation of displaced left-turn intersections: A lane-based approach. Transp. Res. Part C Emerg. Technol. 2015, 61, 29–48. [Google Scholar] [CrossRef]
- Do, G.K.; Simon, W. The significance of endogeneity problems in crash models: An examination of left-turn lanes in intersection crash models. Accid. Anal. Prev. 2006, 38, 1094–1100. [Google Scholar]
- Ma, W.J.; Liu, Y.; Zhao, J.; Wu, N. Increasing the capacity of signalized intersections with left-turn waiting areas. Transp. Res. Part A 2017, 105, 181–196. [Google Scholar] [CrossRef]
- Xuan, Y.G.; Carlos, F.D.; Michael, J.C. Increasing the capacity of signalized intersections with separate left turn phases. Transp. Res. Part B 2011, 45, 769–781. [Google Scholar] [CrossRef]
- Dakic, I.; Mladenovic, M.N.; Stevanovic, A.; Zlatkovic, M. Upgrade Evaluation of Traffic Signal Assets: High-resolution Performance Measurement Framework. Promet-Traffic Transp. 2018, 30, 323–332. [Google Scholar] [CrossRef]
- Zlatkovic, M.; Stevanovic, A.; Peter, T.M. Development and Evaluation of Algorithm for Resolution of Conflicting Transit Signal Priority Requests. Transp. Res. Rec. 2012, 2311, 167–175. [Google Scholar] [CrossRef]
- Juraek, O.; Eungcheol, K.; Myungseob, K.; Sangho, C. Development of conflict techniques for left-turn and cross-traffic at protected left-turn signalized intersections. Saf. Sci. 2010, 48, 460–468. [Google Scholar]
- Nikiforos, S.; Adam, H.; Adam, K. A simulation-based approach in determining permitted left-turn capacities. Transp. Res. Part C Emerg. Technol. 2015, 55, 486–495. [Google Scholar]
- Wu, J.M.; Liu, P.; Tian, Z.Z.; Xu, C.C. Operational analysis of the contraflow left-turn lane design at signalized intersections in China. Transp. Res. Part C Emerg. Technol. 2016, 69, 228–241. [Google Scholar] [CrossRef]
- Ma, C.X.; Hao, W.; Wang, A.B.; Zhao, H.X. Developing a Coordinated Signal Control System for Urban Ring Road under the Vehicle-infrastructure Connected Environment. IEEE Access 2018, 6, 52471–52478. [Google Scholar] [CrossRef]
- Yan, X.D.; Essam, R.; Guo, D.H. Effects of major-road vehicle speed and driver age and gender on left-turn gap acceptance. Accid. Anal. Prev. 2007, 39, 843–852. [Google Scholar] [CrossRef] [PubMed]
- Shaaban, K.; Hamad, H. Critical Gap Comparison between One-, Two-, and Three-Lane Roundabouts in Qatar. Sustainability 2020, 12, 4232. [Google Scholar] [CrossRef]
- Xi’an Municipal Bureau of Statistics. 2019 Xi’an Statistical Yearbook; China Statistics Press: Beijing, China, 2019. Available online: http://tjj.xa.gov.cn/tjnj/2019/zk/indexeh.htm (accessed on 10 May 2020).
- Xi’an Goveronment Homepage. Profile of Xi’an. 2020. Available online: http://en.xa.gov.cn/thisisxian/profile/944.htm (accessed on 10 May 2020).
- Zhang, J.; Wang, Y.Q.; Zhou, W. Research on relic protection in Xi’an subway engineering. In Proceedings of the 2011 International Symposium on Water Resource and Environmental Protection (ISWREP 2011), Xi’an, China, 20–22 May 2011. [Google Scholar] [CrossRef]
- AutoNavi Traffic Big-Data. 2019. Traffic Analysis Reports for Major Cities in China. 2020. Available online: Https://report.amap.com/share.do?id=8b04ff737067a78601707b2ba0542d72 (accessed on 25 February 2020).
- Zhao, Y.; Liu, P.; Chen, Y.G.; Hao, Y. Can Left-turn Waiting Areas Improve the Capacity of Left-turn Lanes at Signalized Intersections? Procedia-Soc. Behav. Sci. 2012, 43, 192–200. [Google Scholar]
- Ronald, T.M.; Fred, C. Recommended guidelines for the calibration and validation of traffic simulation models. In Proceedings of the 8th TRB Conference on the Application of Transportation Schemening Methods, Corpus Christi, TX, USA, 22–26 April 2002; pp. 178–187. [Google Scholar]
- Park, B.; Won, J.; Yun, I. Application of Microscopic Simulation Model Calibration and Validation Procedure: Case Study of Coordinated Actuated Signal System. Transp. Res. Rec. 2006, 1978, 113–122. [Google Scholar] [CrossRef]
- Chu, L.Y.; Liu, H.; Oh, J.S.; Recker, W. A calibration procedure for microscopic traffic simulation. In Proceedings of the Intelligent Transportation Systems, Shanghai, China, 12–15 October 2003; Volume 2, pp. 1574–1579. [Google Scholar]
- Xiang, Y.; Li, Z.; Wang, W.; Chen, J.; Wang, H.; Li, Y. Evaluating the Operational Features of an Unconventional Dual-Bay U-Turn Design for Intersections. PLoS ONE 2016, 11, e0163758. [Google Scholar] [CrossRef] [Green Version]
- Sun, J. Guideline for Microscopic Traffic Simulation Analysis; Tongji University Press: Shanghai, China, 2014. [Google Scholar]
- Jayasooriya, N.; Bandara, S. Calibrating and validating VISSIM microscopic simulation software for the context of Sri Lanka. In Proceedings of the 2018 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 30 May–1 June 2018; pp. 494–499. [Google Scholar]
- Henclewood, D.; Suh, W.; Rodgers, M.O.; Fujimoto, R.; Hunter, M.P. A calibration procedure for increasing the accuracy of microscopic traffic simulation models. Simulation 2017, 93, 35–47. [Google Scholar] [CrossRef]
- Federal Highway Administration Research and Technology. Surrogate Safety Assessment Model (SSAM) Publications. 2017. Available online: https://www.fhwa.dot.gov/publications/lists/020.cfm (accessed on 10 May 2020).
- Federal Highway Administration (FHWA). TECHBRIEF Surrogate Safety Assessment Model (SSAM); Federal Highway Administration: Washiton, DC, USA, 2008. [Google Scholar]
- Federal Highway Administration (FHWA). Surrogate Safety Assessment Model (SSAM)–SOFTWARE USER MANUAL; Federal Highway Administration: Washiton, DC, USA, 2008. [Google Scholar]
- Transportation Research Board (TRB). Highway Capacity Manual, Sixth Edition: A Guide for Multimodal Mobility Analysis; Transportation Research Board: Washiton, DC, USA, 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | South to North | North to South | Eastbound | |||
|---|---|---|---|---|---|---|
| Flow | Through | Left turn | Through | Right turn | Left turn | Right turn |
| Flow Number | ||||||
| Car | 3170 | 59 | 2599 | 118 | 511 | 130 |
| Truck/Bus | 135 | 0 | 81 | 0 | 10 | 0 |
| Max. speed (km/h) | 22.4 | 25.1 | 65.2 | 26.3 | 22.2 | 23.2 |
| Min. speed (km/h) | 0 | 0 | 0 | 0 | 0 | 0 |
| Average speed (km/h) | 17.3 | 16.4 | 31.7 | 19.8 | 14.3 | 20.6 |
| Flow | |||||||
|---|---|---|---|---|---|---|---|
| Morning peak data | Investigated capacity (veh/h) | 3074 | 54 | 2492 | 109 | 484 | 120 |
| Simulated capacity (veh/h) | 2865 | 58 | 2237 | 87 | 495 | 134 | |
| Individual MAPE (%) | −6.8 | 5.7 | −10.2 | −20.7 | 2.1 | 10.8 | |
| MAPE (%) | −7.3 | ||||||
| Middle (noon) valley data | Investigated capacity (veh/h) | 2985 | 37 | 2658 | 37 | 149 | 29 |
| Simulated capacity (veh/h) | 2649 | 45 | 2214 | 32 | 159 | 34 | |
| Individual MAPE (%) | −11.3 | 21.6 | −16.7 | −13.5 | 6.7 | 17.2 | |
| MAPE (%) | −12.9 | ||||||
| Evening peak data | Investigated capacity (veh/h) | 3305 | 59 | 2680 | 118 | 521 | 130 |
| Simulated capacity (veh/h) | 3174 | 65 | 2387 | 94 | 545 | 146 | |
| Individual MAPE (%) | −4.0 | 10.1 | −10.9 | −20.3 | 4.6 | 12.3 | |
| MAPE (%) | −5.9 | ||||||
| Scheme Number | Item | Crossing | Rear End | Lane Change | Total |
|---|---|---|---|---|---|
| 1 | Present situation | 362 | 609 | 102 | 1073 |
| 2 | Offset 0 m | 1 | 123 | 48 | 172 |
| 3 | Offset 2 m | 0 | 118 | 63 | 181 |
| 4 | Offset 4 m | 0 | 232 | 83 | 315 |
| 5 | Offset 6 m | 0 | 142 | 69 | 211 |
| 6 | Offset 8 m | 0 | 165 | 68 | 233 |
| 7 | Offset 10 m | 0 | 162 | 67 | 229 |
| 8 | Offset 12 m | 1 | 151 | 71 | 223 |
| 9 | Offset 14 m | 1 | 133 | 63 | 197 |
| 10 | Offset 16 m | 0 | 165 | 85 | 250 |
| 11 | Offset 18 m | 0 | 177 | 96 | 273 |
| 12 | Offset 20 m | 0 | 151 | 66 | 217 |
| 13 | Offset 22 m | 0 | 155 | 63 | 218 |
| 14 | Offset 24 m | 0 | 139 | 85 | 224 |
| 15 | Offset 26 m | 0 | 131 | 80 | 211 |
| 16 | Offset 28 m | 1 | 207 | 62 | 270 |
| 17 | Straight 0 m | 0 | 169 | 64 | 233 |
| 18 | Straight 10 m | 0 | 139 | 64 | 203 |
| 19 | Straight 20 m | 0 | 105 | 60 | 165 |
| 20 | Straight 30 m | 0 | 139 | 48 | 187 |
| 21 | Straight 40 m | 0 | 147 | 64 | 211 |
| 22 | Straight 50 m | 0 | 128 | 63 | 191 |
| 23 | Straight 100 m | 0 | 133 | 51 | 184 |
| Item | Travel Time | Delay | Number of Stops | |||
|---|---|---|---|---|---|---|
| Number 1 | 695.83 | 250.64 | 21.38 | |||
| Number 16 | 511.23 | −26.53% | 181.62 | −27.54% | 10.0 | −53.23% |
| Number 17 | 491.51 | −29.36% | 160.88 | −36.22% | 7.35 | −65.62% |
| Item | Value |
|---|---|
| Southbound volume (veh/h) | 686/1029/1372/1715/2058/2401/2744/3087/3430 |
| Northbound volume (veh/h) | 914/1371/1828/2285/2742/3199/3656/4113/4570 |
| Eastbound volume (veh/h) | 86/172/343/686/1029 |
| Index | T | D | S | Summation |
|---|---|---|---|---|
| Weight | 0.2100 | 0.3873 | 0.4027 | 1.0000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Y.; Luo, Z.; Wu, H.; Han, X.; Pan, B.; Liu, S.; Claudel, C.G. Evaluation of Two Improved Schemes at Non-Aligned Intersections Affected by a Work Zone with an Entropy Method. Sustainability 2020, 12, 5494. https://doi.org/10.3390/su12145494
Shao Y, Luo Z, Wu H, Han X, Pan B, Liu S, Claudel CG. Evaluation of Two Improved Schemes at Non-Aligned Intersections Affected by a Work Zone with an Entropy Method. Sustainability. 2020; 12(14):5494. https://doi.org/10.3390/su12145494
Chicago/Turabian StyleShao, Yang, Zhongbin Luo, Huan Wu, Xueyan Han, Binghong Pan, Shangru Liu, and Christian G. Claudel. 2020. "Evaluation of Two Improved Schemes at Non-Aligned Intersections Affected by a Work Zone with an Entropy Method" Sustainability 12, no. 14: 5494. https://doi.org/10.3390/su12145494