A Power Flow Control Strategy for Hybrid Control Architecture of DC Microgrid under Unreliable Grid Connection Considering Electricity Price Constraint



Abstract
1. Introduction
- (i)
- A power flow control strategy for a hybrid DCMG control architecture is proposed by combining the centralized control and distributed control. The proposed hybrid DCMG control scheme stably maintains the DC-link voltage at the nominal value with high reliability and robustness against the communication link fault and the absence of utility grid.
- (ii)
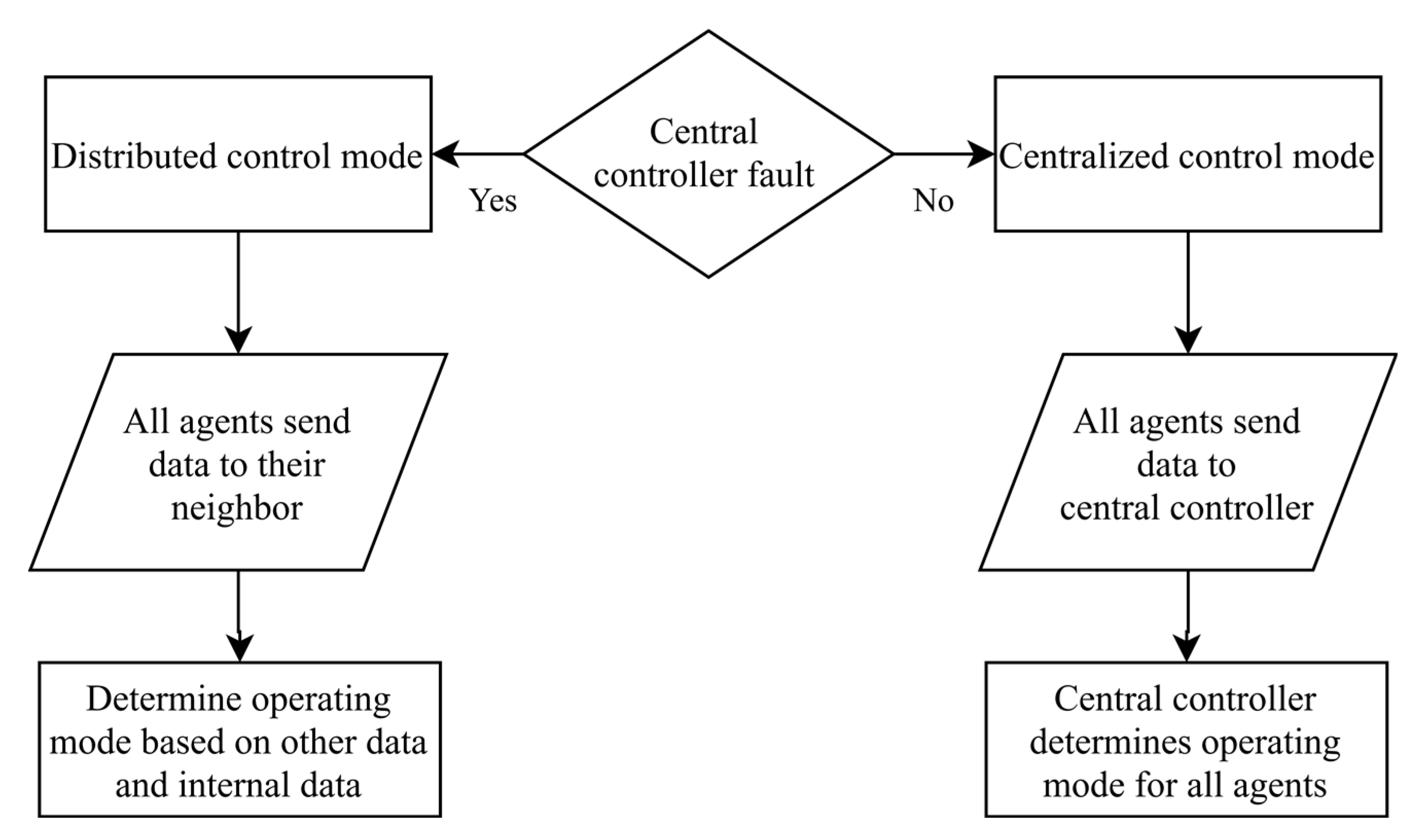
- The proposed hybrid power flow control provides a stable and smooth DCMG operation during the transition between the distributed control and the centralized control, which overcomes the limitations such as the common single point of failure in the centralized control as well as the limitations related with the lack of information exchange in the decentralized control.
- (iii)
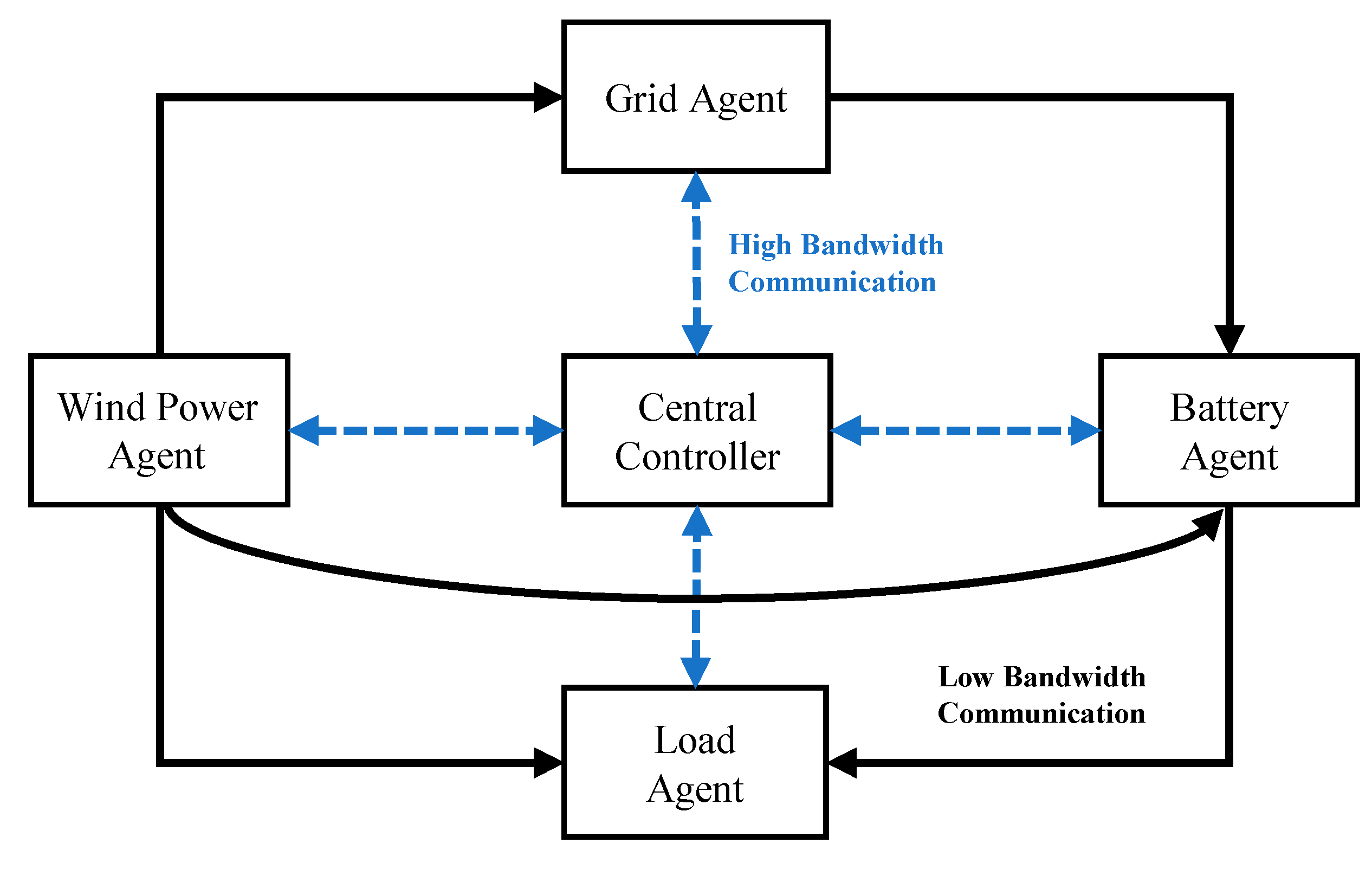
- The proposed scheme can be implemented by the exchange of only a small size of data through the HBC and LBC links, which reduces communication burden and helps the DCMG system reach the optimum solution.
- (iv)
- This study also focuses on minimizing the electricity cost on the consumer side by introducing a power flow control for a hybrid DCMG system with the consideration of electricity price constraint.
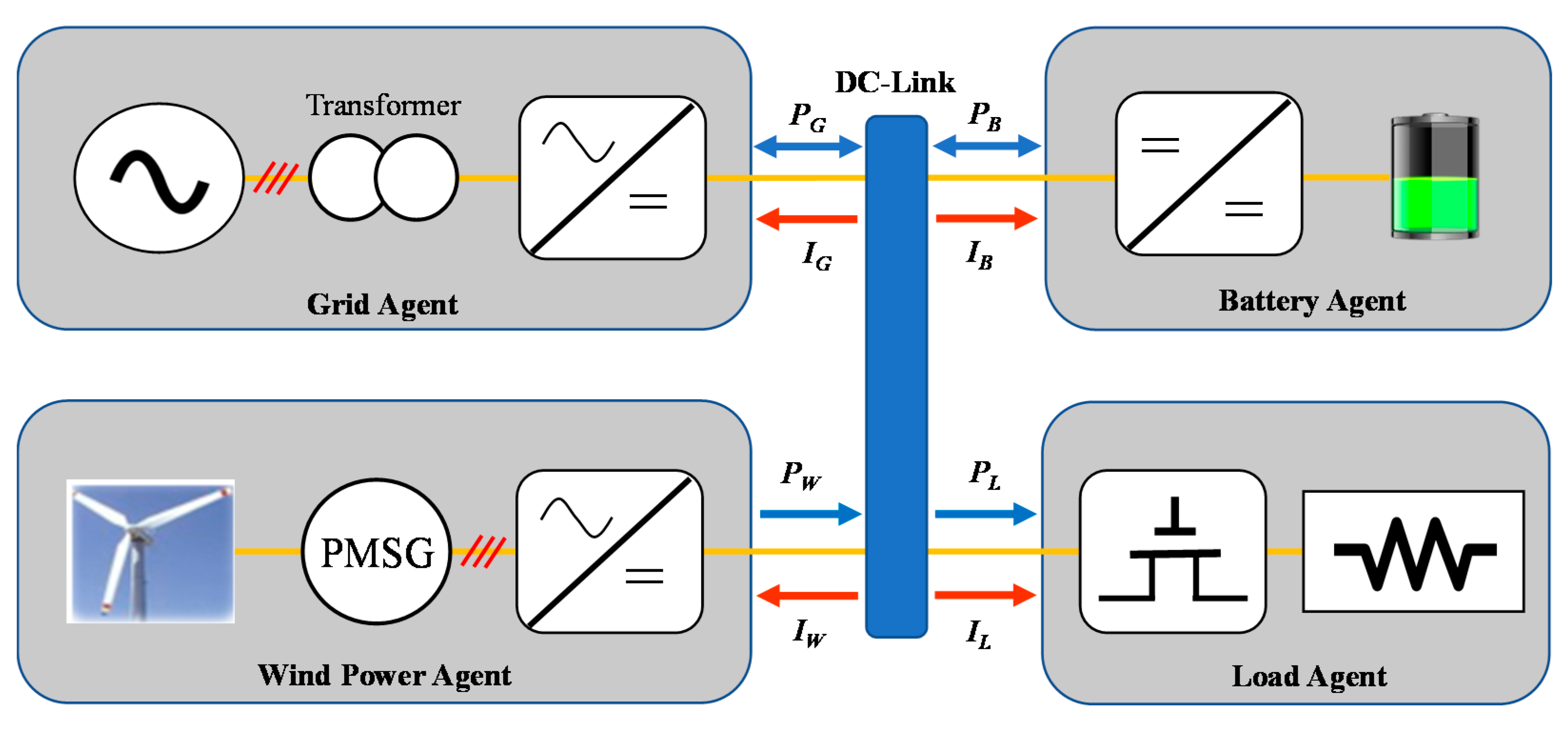
2. Configuration of DCMG System
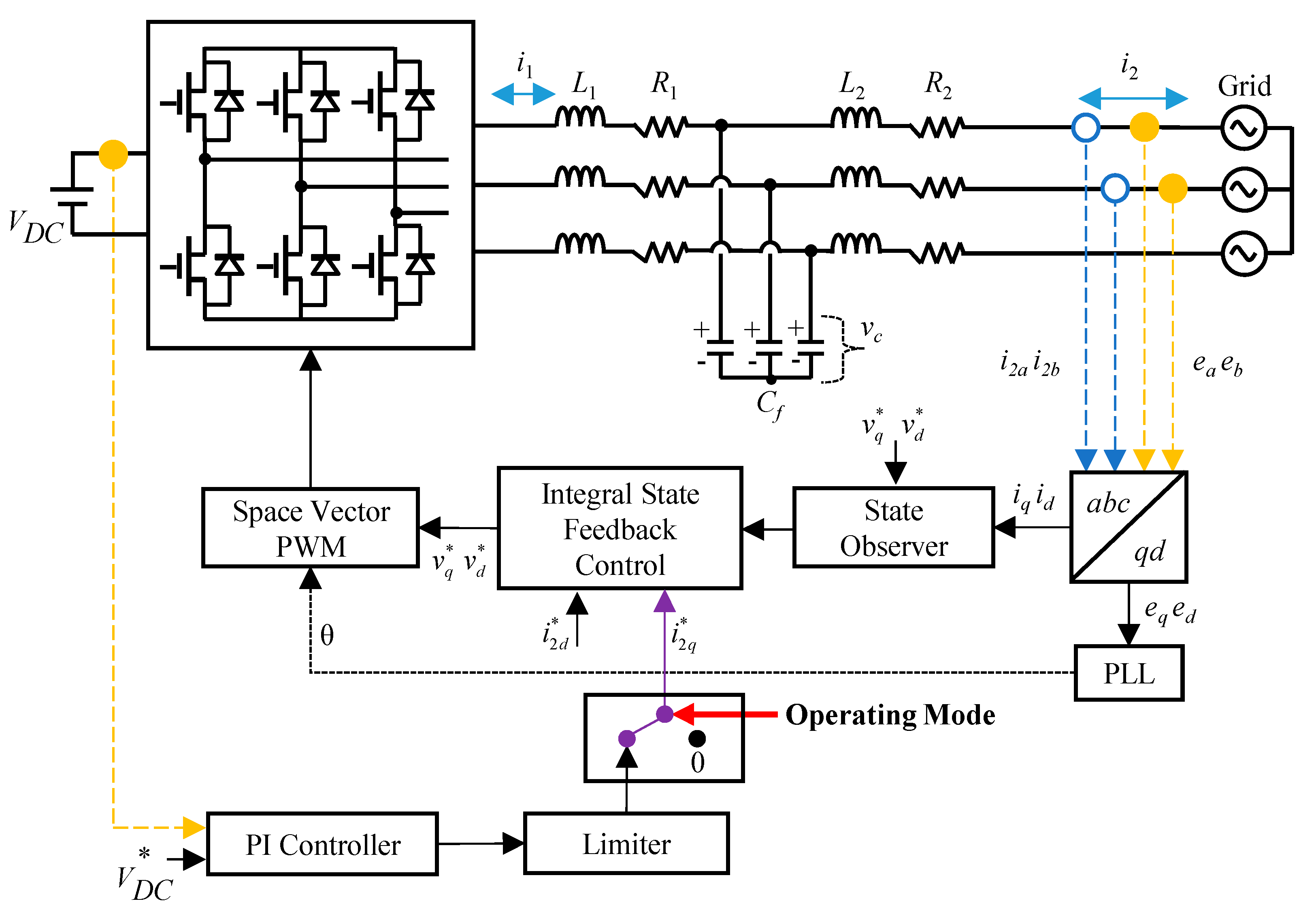
2.1. Grid Agent
2.2. Battery Agent
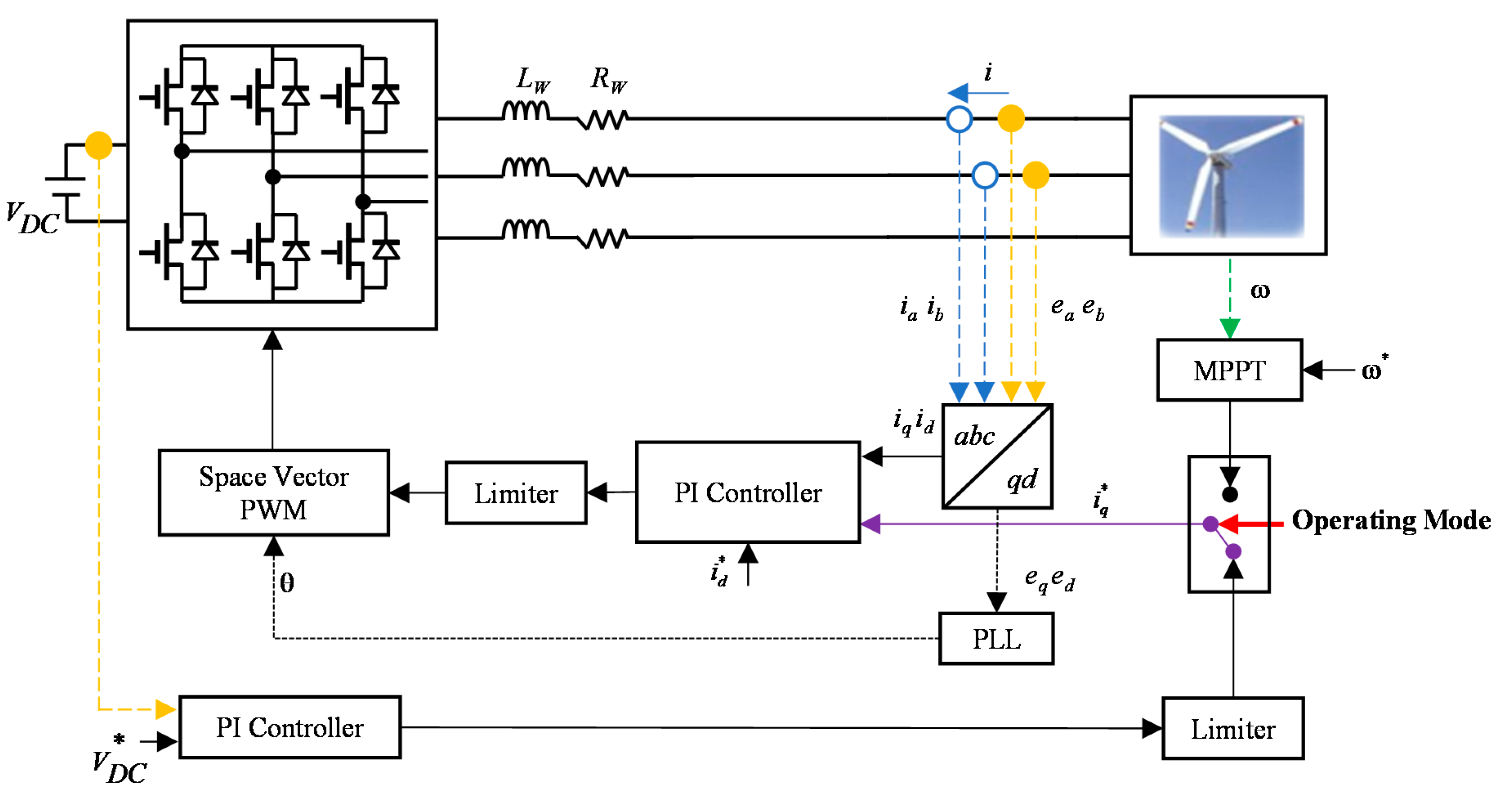
2.3. Wind Power Agent
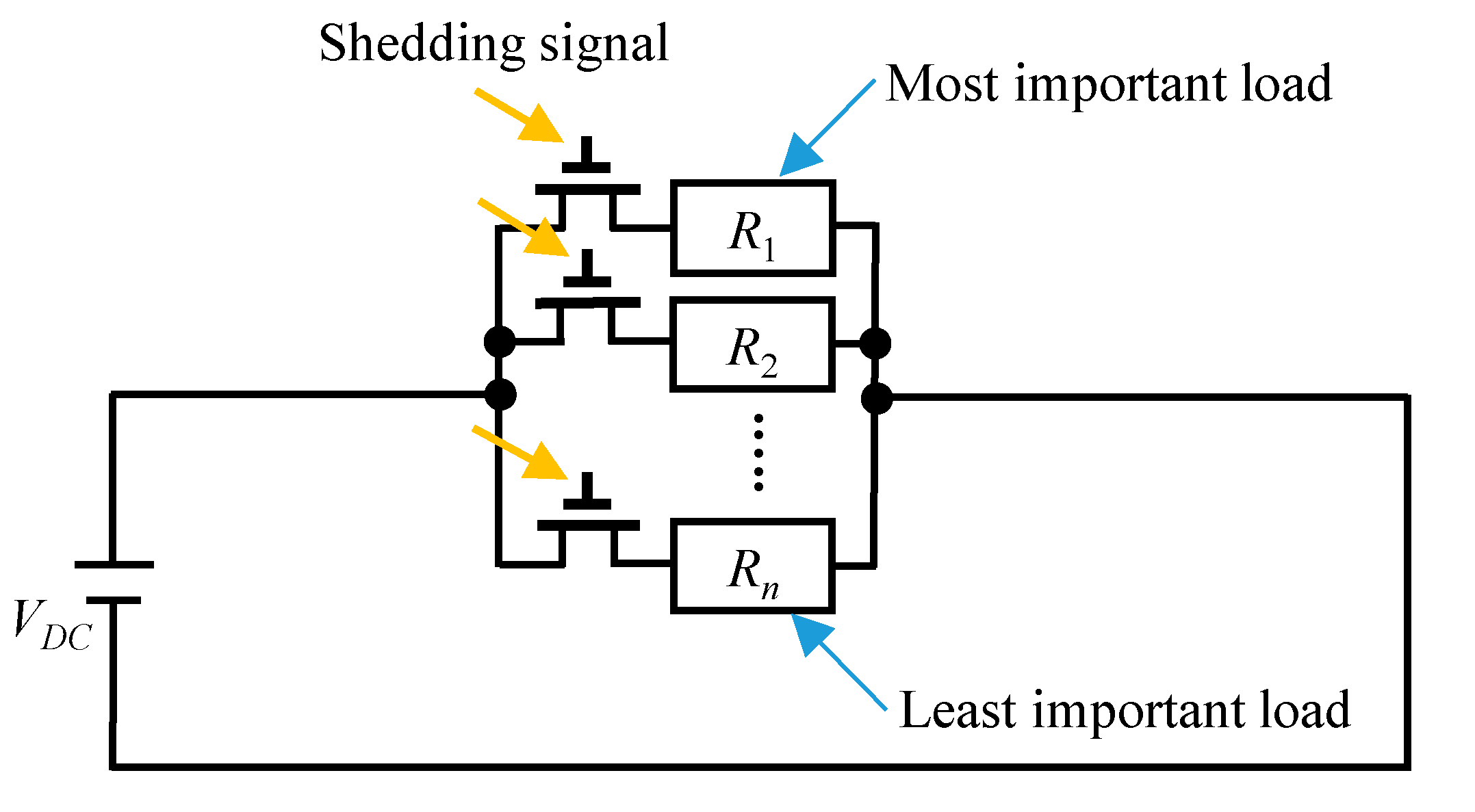
2.4. Load Agent
3. Proposed Hybrid DCMG Control Architecture and Power Flow Control Strategy
3.1. Hybrid DCMG Architecture
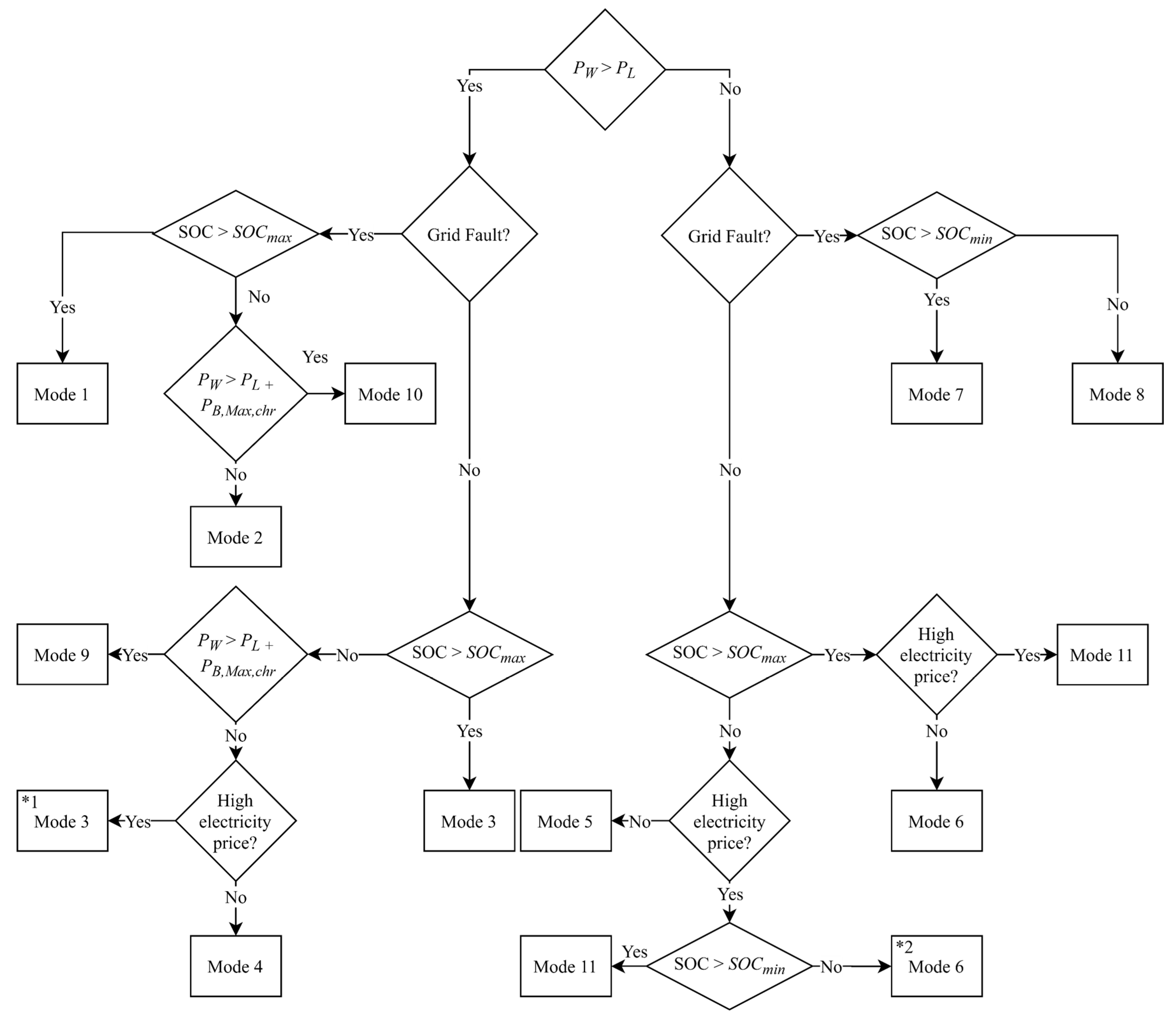
3.2. Power Flow Control Strategy
- Operating mode 1: This operating mode occurs when the generated wind power PW is higher than the required load power demand PL and the battery SOC is higher than SOCmax under a fault in the grid agent. Because PW cannot be absorbed by other agents, the operating mode of the wind power agent is changed into VDC control mode while the battery agent is in IDLE mode.
- Operating mode 2: This operating mode is selected when the generated wind power PW is higher than the required load demand PL, and the battery is not fully charged (SOC < SOCmax) under the grid fault. This operating mode also requires an additional condition that PW is less than the sum of load demand PL and the maximum charging power of battery PB,Max,chr. In this case, the wind power agent operates with the MPPT mode and the battery agent operates with the VDC control mode by charging to regulate the DC-link voltage.
- Operating mode 3: This operating mode is used when the grid agent is normal, the generated wind power PW is higher than the required load demand PL, and the battery has been fully charged. In this case, the grid agent operates in VDC control INV mode to absorb the surplus power from the wind power agent which operates in the MPPT mode, while the battery agent operates in IDLE mode.
- Operating mode 4: This operating mode requires the conditions that the grid agent is normal and the generated wind power PW is higher than the required load demand PL. Additional conditions to select this operating mode are the battery SOC is less than SOCmax, and PW is less than the sum of load demand PL and the maximum charging power of battery PB,Max,chr. In this mode, the wind power agent operates in the MPPT mode, the battery agent charges the battery with the maximum current IB,Max, and the grid agent provides the insufficient power from the grid by operating in VDC control CON mode.
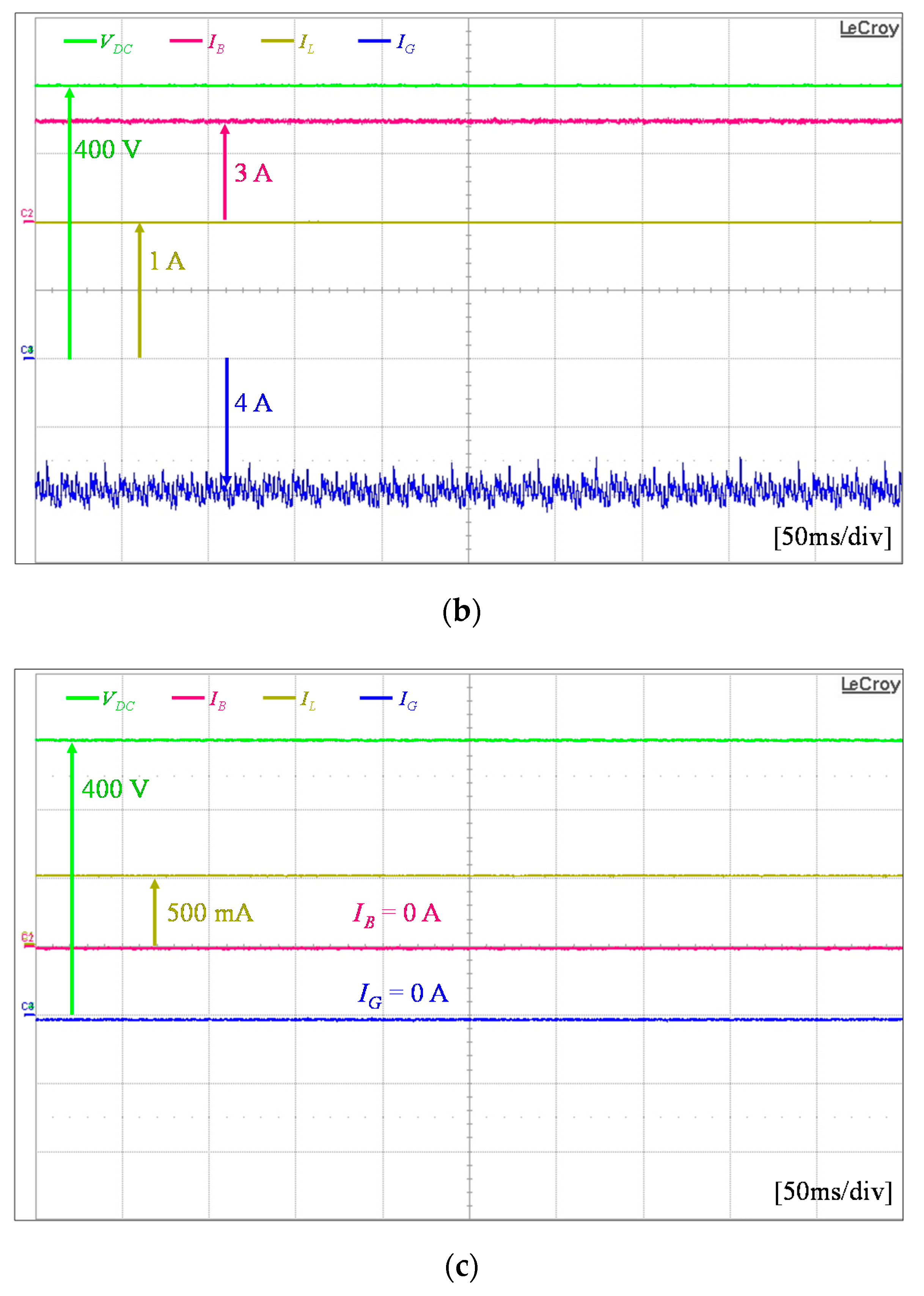
- Operating mode 5: This operating mode requires the conditions that the generated wind power PW is less than the required load demand PL and the battery SOC is less than SOCmax without a fault in the grid agent. The wind power agent draws the maximum power by operating in the MPPT mode, the battery agent charges the battery with the maximum current IB,Max, and the grid agent provides the insufficient power from the grid by operating in VDC control CON mode.
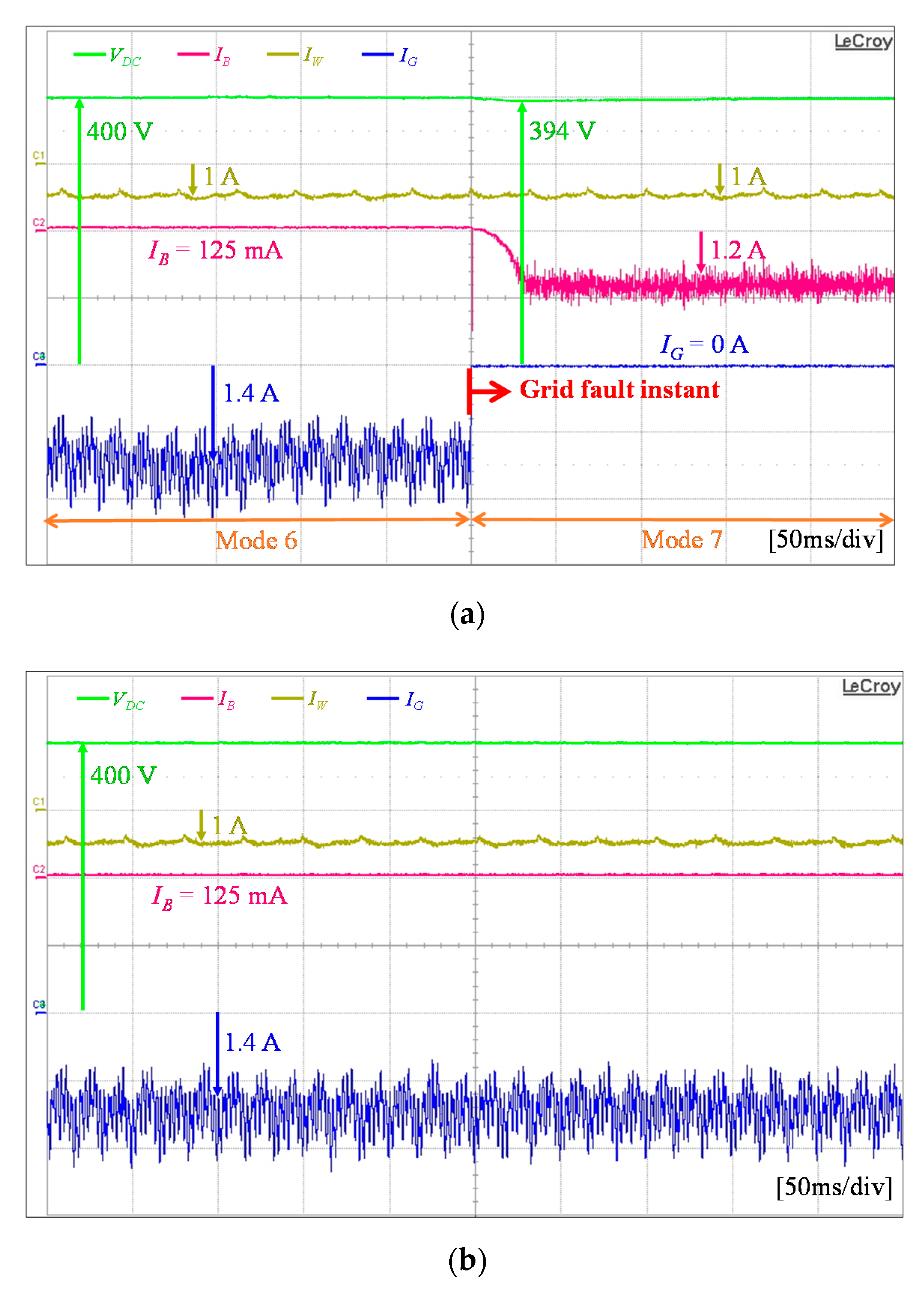
- Operating mode 6: Operating mode 6 follows the same flow with the operating mode 5. The only difference is that this mode is used with the condition of SOC > SOCmax. In this operating mode, while both the wind power agent and grid agent maintain their operations with the same as in the operating mode 5, the battery agent changes its operation into IDLE mode.
- Operating mode 7: When the generated wind power PW is less than the required load demand PL and the battery SOC is higher than SOCmin under a fault in the grid agent, the operating mode 7 is chosen. In this mode, the wind power agent operates in the MPPT mode and the battery agent regulates the DC-link voltage by operating in VDC control by discharging.
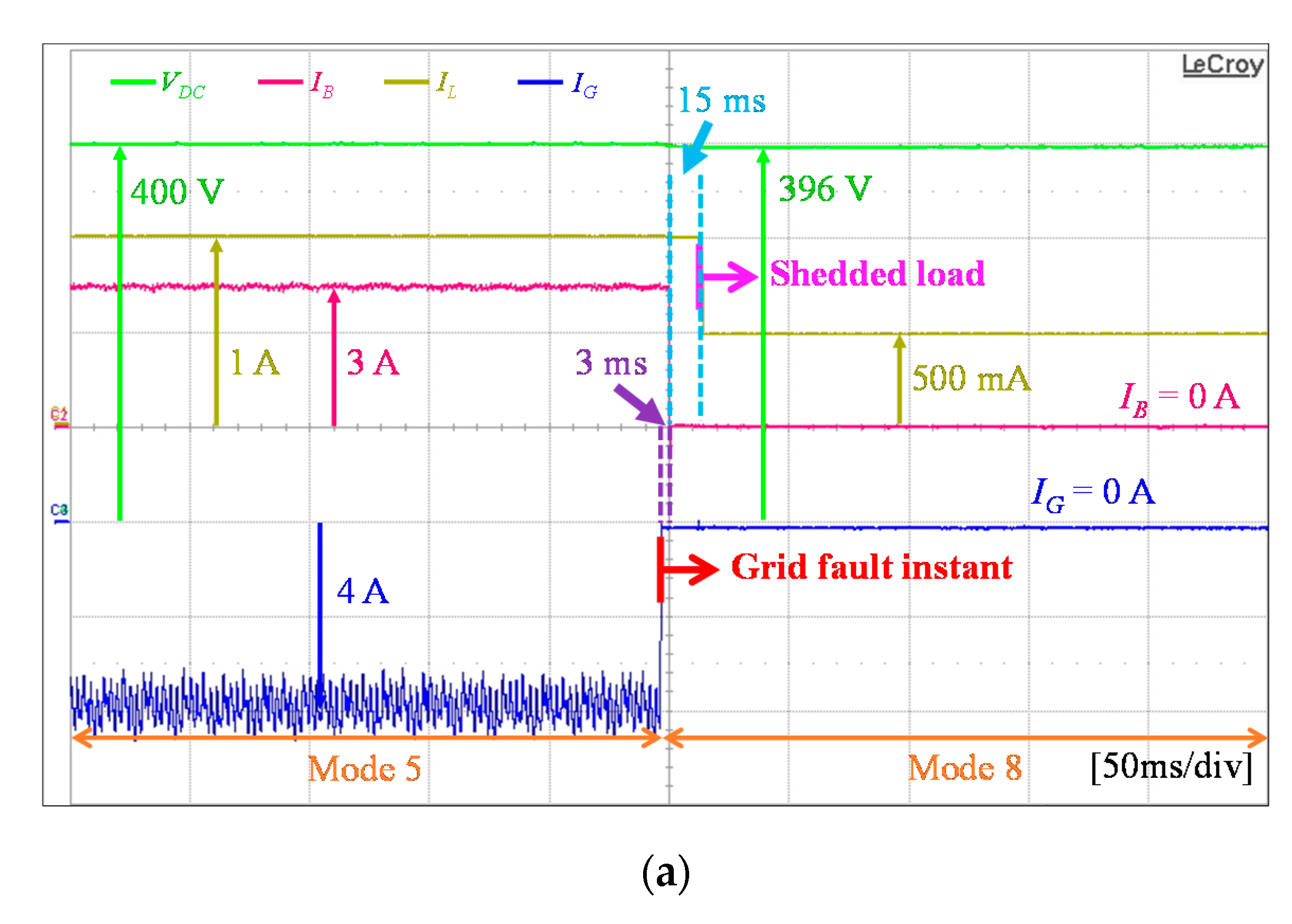
- Operating mode 8: Operating mode 8 follows the same flow with the operating mode 7. The only difference is that this mode is used with the condition of SOC < SOCmin. When the DCMG system operates in operating mode 7 for a long period, the battery SOC is gradually decreased and reaches the threshold level of SOCmin. In this case, the battery agent can not supply the power any more. To avoid the DCMG system collapse under this critical condition, the load shedding algorithm is activated by the load agent. The load agent removes less important loads, the battery agent is in IDLE mode, and the wind power agent changes its operating mode into VDC control mode to regulate the DC-link voltage.
- Operating mode 9: Operating mode 9 is selected by following the same flow with the operating mode 4. The difference is that this mode is determined when the generated wind power PW is greater than the sum of load demand PL and the maximum charging power of battery PB,Max,chr. In this mode, the wind power agent still operates in the MPPT mode, the battery agent charges the battery with the maximum current IB,Max. However, contrary to operating mode 4, the grid agent provides excessive power into the grid by operating in VDC control INV mode.
- Operating mode 10: Operating mode 10 follows the same flow with the operating mode 2. The only difference is that this mode is chosen with the condition of PW > PL + PB,Max,chr. In this condition, the generated wind power PW is higher than the required load demand PL, and the battery is not fully charged (SOC < SOCmax) under the grid fault. In addition, since PW can supply additional charging power of battery, the battery agent charges the battery with the maximum current IB,Max, and the wind power agent changes its operating mode into VDC control mode to regulate the DC-link voltage.
4. Simulation Results
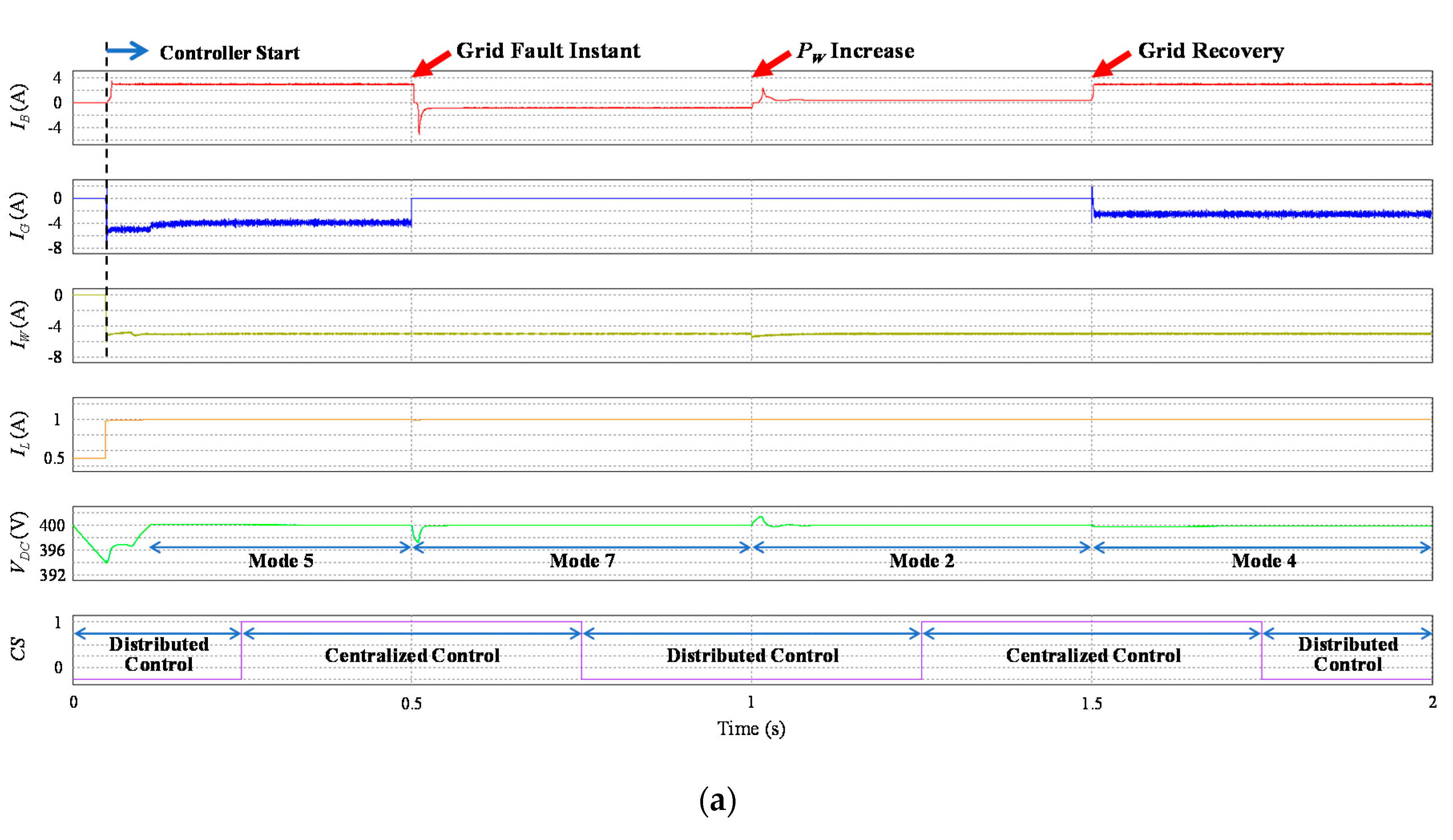
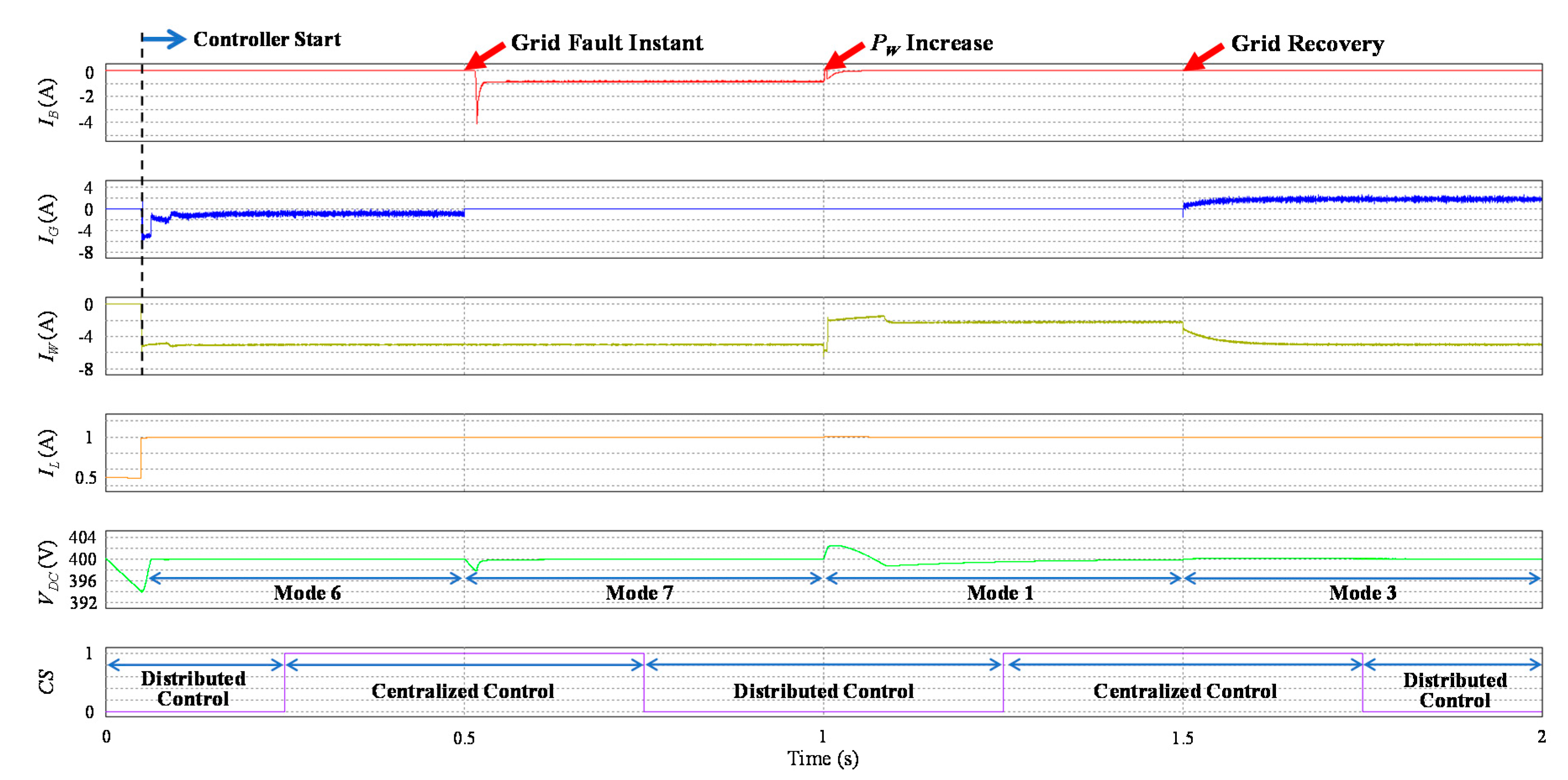
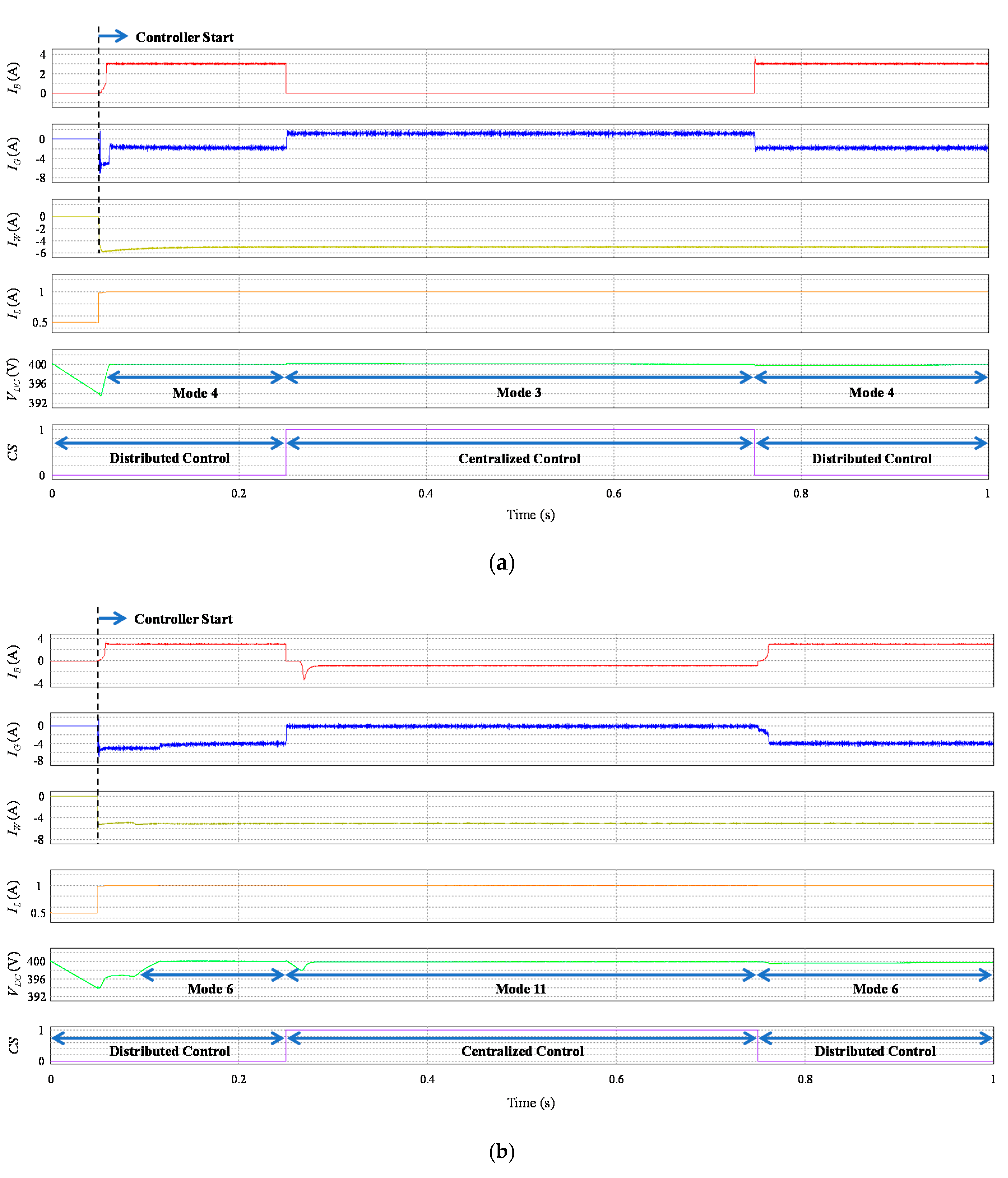
4.1. Case of Low Battery SOC
4.2. Case of Safe Regional Battery SOC
4.3. Case of High Battery SOC
4.4. Case of Electricity Price Constraint
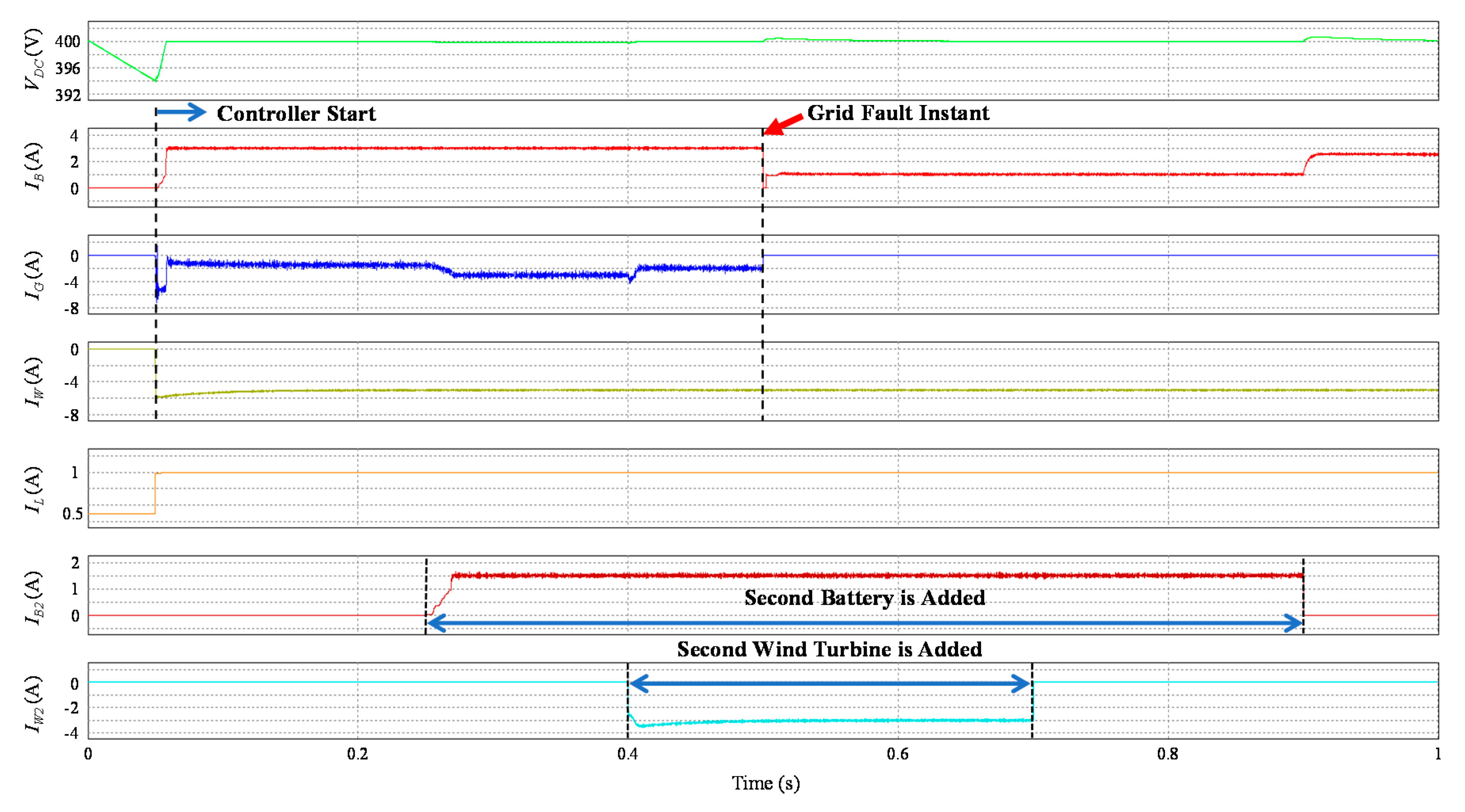
4.5. Scalability Test
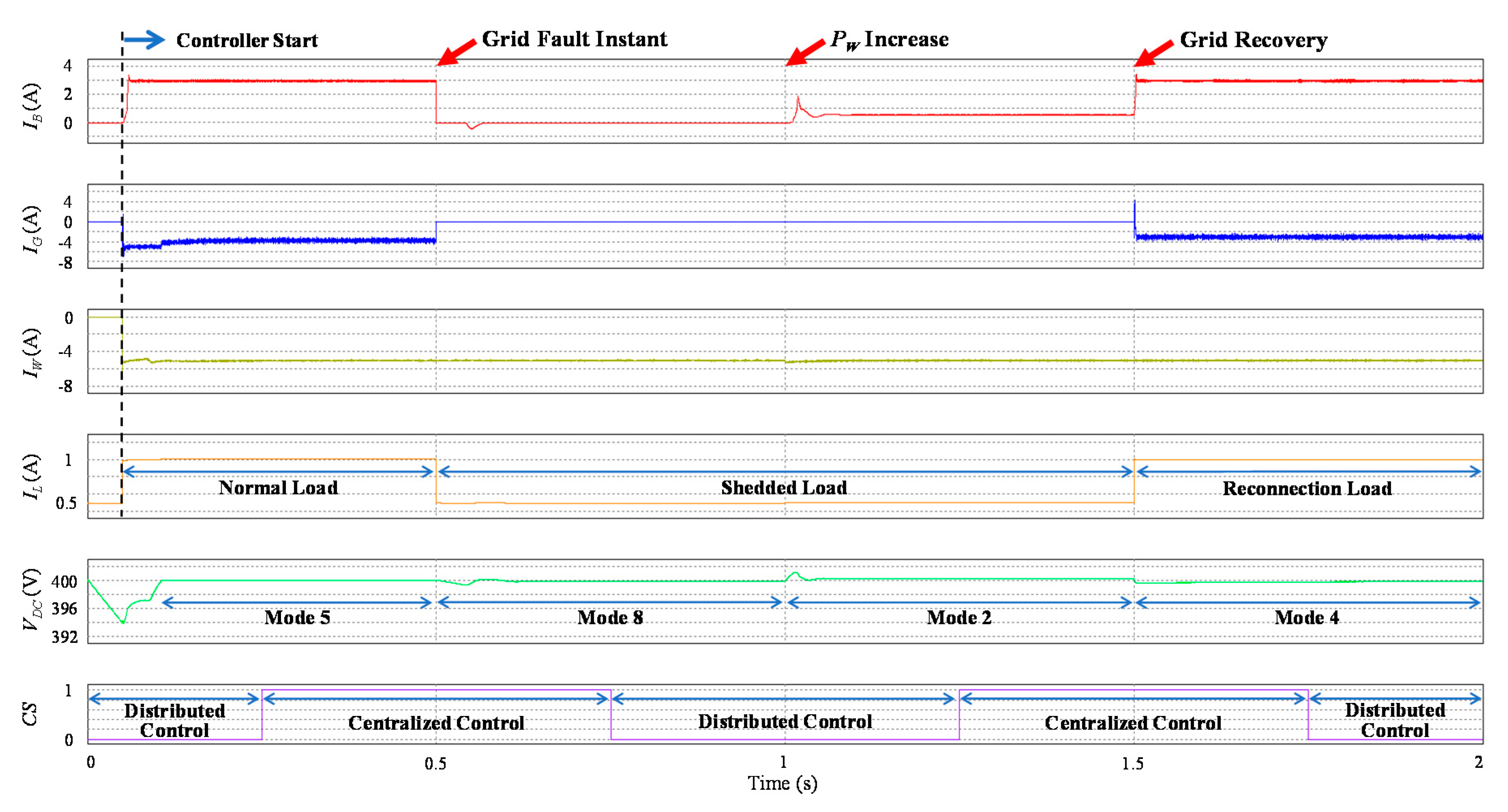
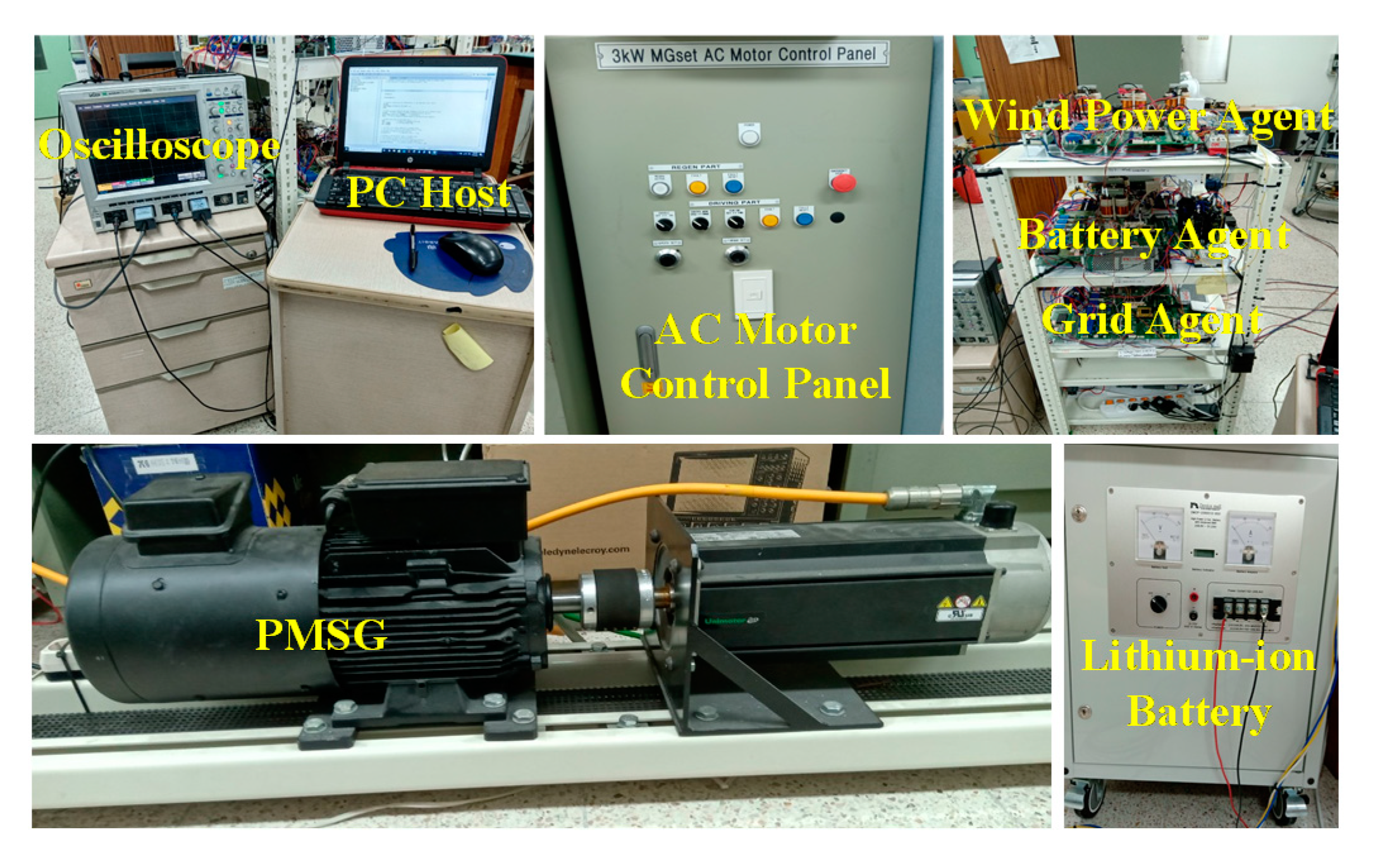
5. Experimental Results
5.1. Case of Low Battery SOC
5.2. Case of Safe Regional Battery SOC
5.3. Case of High Battery SOC
5.4. Case of Electricity Price Constraint
6. Conclusions
- (i)
- A power flow control strategy for a hybrid DCMG control scheme which combines the centralized control and distributed control is proposed. The proposed scheme improves the system stability and robustness even in the presence of a fault in the communication link of the centralized control. All the power agents operate stably within the DCMG system without severe transients in spite of the transition between the distributed control and the centralized control. The DC-link voltage can be also regulated stably with the proposed scheme in both the centralized control and distributed control even during transition periods.
- (ii)
- By using the proposed scheme, the common single point of failure as in the centralized control can be avoided. Even when the distributed control takes control of the DCMG system because of a fault in the CC, the DCMG system stably works. Furthermore, the problems related to the lack of information exchange as in the decentralized control can be solved by means of a communication network.
- (iii)
- The proposed scheme proves that the hybrid DCMG control scheme can be implemented by the exchange of only a small size of data through the HBC and LBC links to exchange the information with reduced communication burden.
- (iv)
- In the proposed hybrid DCMG control scheme, the constraint of electricity price is also considered to develop the power flow control with the aim to minimize the consumer electricity cost.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rosero, C.X.; Velasco, M.; Marti, P.; Camacho, A.; Miret, J.; Castilla, M.A. Active Power Sharing and Frequency Regulation in Droop-Free Control for Islanded Microgrids Under Electrical and Communication Failures. IEEE Trans. Ind. Electron. 2020, 67, 6461–6472. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated PHEV, PV, and ESS for Microgrid Frequency Regulation Using Centralized Model Predictive Control Considering Variation of PHEV Number. IEEE Access 2018, 6, 69151–69161. [Google Scholar] [CrossRef]
- Mathew, P.; Madichetty, S.; Mishra, S. A Multi-Level Control and Optimization Scheme for Islanded PV Based Microgrid: A Control Frame Work. IEEE J. Photovolt. 2019, 9, 822–831. [Google Scholar] [CrossRef]
- Espín-Sarzosa, D.; Palma-Behnke, R.; Núñez-Mata, O. Energy Management Systems for Microgrids: Main Existing Trends in Centralized Control Architectures. Energies 2020, 13, 547. [Google Scholar] [CrossRef]
- Balog, R.S.; Weaver, W.W.; Krein, P.T. The Load as an Energy Asset in a Distributed DC SmartGrid Architecture. IEEE Trans. Smart Grid 2012, 3, 253–260. [Google Scholar] [CrossRef]
- Khorsandi, A.; Ashourloo, M.; Mokhtari, H. A Decentralized Control Method for a Low-Voltage DC Microgrid. IEEE Trans. Energy Convers. 2014, 9, 793–801. [Google Scholar] [CrossRef]
- Cook, M.D.; Parker, G.G.; Robinett, R.D.; Weaver, W.W. Decentralized Mode-Adaptive Guidance and Control for DC Microgrid. IEEE Trans. Power Deliv. 2017, 32, 263–271. [Google Scholar]
- Nasirian, V.; Moayedi, S.; Davoudi, A.; Lewis, F.L. Distributed Cooperative Control of DC Microgrids. IEEE Trans. Power Electron. 2015, 30, 2288–2303. [Google Scholar] [CrossRef]
- Kwasinki, A.; Onwuchekwa, C.N. Dynamic Behavior and Stabilization of DC Microgrids with Instantaneous Constant-Power Loads. IEEE Trans. Power Electron. 2011, 26, 822–834. [Google Scholar] [CrossRef]
- Feng, X.; Shekhar, A.; Yang, F.; Hebner, R.E.; Bauer, P. Comparison of Hierarchical Control and Distributed Control for Microgrid. Elect. Power Compon. Syst. 2017, 45, 1043–1056. [Google Scholar] [CrossRef]
- Diaz, N.L.; Luna, A.C.; Vasquez, J.C.; Guerrero, J.M. Centralized Control Architecture for Coordination of Distributed Renewable Generation and Energy Storage in Islanded AC Microgrids. IEEE Trans. Power Electron. 2017, 32, 5202–5213. [Google Scholar]
- Katiraei, F.; Iravani, R.; Hatziargyriou, N.; Dimeas, A. Microgrids management. IEEE Power Energy Mag. 2008, 6, 54–65. [Google Scholar]
- Xu, Q.; Xiao, J.; Wang, P.; Wen, C. A Decentralized Control Strategy for Economic Operation of Autonomous AC, DC, and Hybrid AC/DC Microgrids. IEEE Trans. Energy Convers. 2017, 32, 1345–1355. [Google Scholar]
- Liu, W.; Gu, W.; Sheng, W.; Meng, X.; Wu, Z.; Chen, W. Decentralized Multi-Agent System-Based Cooperative Frequency Control for Autonomous Microgrids with Communication Constraints. IEEE Trans. Sustain. Energy 2014, 5, 446–456. [Google Scholar]
- Karimi, Y.; Oraee, H.; Golsorkhi, M.S.; Guerrero, J.M. Decentralized Method for Load Sharing and Power Management in a PV/Battery Hybrid Source Islanded Microgrid. IEEE Trans. Power Electron. 2017, 32, 3525–3535. [Google Scholar]
- Nguyen, T.V.; Kim, K.H. Power Flow Control Strategy and Reliable DC-Link Voltage Restoration for DC Microgrid under Grid Fault Conditions. Sustainability 2019, 11, 3781. [Google Scholar]
- Mehdi, M.; Kim, C.H.; Saad, M. Robust Centralized Control for DC Islanded Microgrid Considering Communication Network Delay. IEEE Access 2020, 8, 77765–77778. [Google Scholar]
- Nguyen, T.V.; Kim, K.-H. An Improved Power Management Strategy for MAS-Based Distributed Control of DC Microgrid under Communication Network Problems. Sustainability 2020, 12, 122. [Google Scholar]
- Mathew, P.; Madichetty, S.; Mishra, S. A Multilevel Distributed Hybrid Control Scheme for Islanded DC Microgrids. IEEE Syst. J. 2019, 13, 4200–4207. [Google Scholar]
- Mohamed, Y.A.I.; Radwan, A.A. Hierarchical Control System for Robust Microgrid Operation and Seamless Mode Transfer in Active Distribution Systems. IEEE Trans. Smart Grid 2011, 2, 352–362. [Google Scholar]
- Zhou, L.; Zhang, Y.; Lin, X.; Li, C.; Cai, Z.; Yang, P. Optimal Sizing of PV and BESS for a Smart Household Considering Different Price Mechanisms. IEEE Access 2018, 6, 41050–41059. [Google Scholar]
- Wu, X.; Hu, X.; Yin, X.; Zhang, C.; Qian, S. Optimal Battery Sizing of Smart Home via Convex Programming. Energy 2017, 45, 444–453. [Google Scholar]
- Hemmati, R.; Saboori, H. Stochastic Optimal Battery Storage Sizing and Scheduling in Home Energy Management Systems Equipped with Solar Photovoltaic Panels. Energy Build. 2017, 152, 290–300. [Google Scholar]
- Hemmati, R. Technical and Economic Analysis of Home Energy Management System Incorporating Small-Scale Wind Turbine and Battery Energy Storage System. J. Clean. Prod. 2017, 159, 106–118. [Google Scholar]
- Wang, H.; Fang, H.; Yu, X.; Liang, S. How Real Time Pricing Modifies Chinese Households’ Electricity Consumption. J. Clean. Prod. 2018, 178, 776–790. [Google Scholar]
- Newsham, G.R.; Bowker, B.G. The Effect of Utility Time-Varying Pricing and Load Control Strategies on Residential Summer Peak Electricity Use: A Review. Energy Policy 2010, 38, 3289–3296. [Google Scholar]
- Zhou, B.; Yang, R.; Li, C.; Wang, Q.; Liu, J. Multiobjective Model of Time-of-Use and Stepwise Power Tariff for Residential Consumers in Regulated Power Markets. IEEE Syst. J. 2018, 12, 2676–2687. [Google Scholar]
- Li, C.; Tang, S.; Cao, Y.; Xu, Y.; Li, Y.; Li, J.; Zhang, R. A New Stepwise Power Tariff Model and Its Application for Residential Consumers in Regulated Electricity Markets. IEEE Trans. Power Syst. 2013, 28, 300–308. [Google Scholar]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An Improved Droop Control Method for DC Microgrids Based on Low Bandwidth Communication with DC Bus Voltage Restoration and Enhanced Current Sharing Accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar]
- Yoon, S.J.; Lai, N.B.; Kim, K.H. A Systematic Controller Design for a Grid-connected Inverter with LCL Filter Using a Discrete-time Integral State Feedback Control and State Observer. Energies 2018, 11, 437. [Google Scholar]
- Tran, T.V.; Yoon, S.-J.; Kim, K.-H. An LQR-Based Controller Design for an LCL-Filtered Grid-Connected Inverter in Discrete-Time State-Space under Distorted Grid Environment. Energies 2018, 11, 2062. [Google Scholar] [CrossRef]
- Bimarta, R.; Tran, T.V.; Kim, K.-H. Frequency-Adaptive Current Controller Design Based on LQR State Feedback Control for a Grid-Connected Inverter under Distorted Grid. Energies 2018, 11, 2674. [Google Scholar] [CrossRef]
- Kolokotsa, D.; Rovas, D.; Kosmatopoulos, E.; Kalaitzakis, K. A Roadmap towards Intelligent Net Zero- and Positive-Energy Buildings. Sol. Energy 2011, 85, 3067–3084. [Google Scholar] [CrossRef]
- Beaudin, M.; Zareipour, H. Home Energy Management Systems: A Review of Modelling and Complexity. Renew. Sustain. Energy Rev. 2015, 45, 318–335. [Google Scholar]
- Boynuegri, A.R.; Yagcitekin, B.; Baysal, M.; Karakas, A.; Uzunoglu, M. Energy management algorithm for smart home with renewable energy sources. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Wind Power Agent | Grid Agent | Battery Agent | Load Agent |
|---|---|---|---|---|
| 1 | VDC control | Fault | IDLE | Normal/Reconnection |
| 2 | Maximum power point tracking (MPPT) | Fault | VDC control by charging | Normal/Reconnection |
| 3 | MPPT | VDC control (inverter (INV)) | IDLE | Normal/Reconnection |
| 4 | MPPT | VDC control (converter (CON)) | Charge with IB,Max | Normal/Reconnection |
| 5 | MPPT | VDC control (CON) | Charge with IB,Max | Normal/Reconnection |
| 6 | MPPT | VDC control (CON) | IDLE | Normal/Reconnection |
| 7 | MPPT | Fault | VDC control by discharging | Normal/Reconnection |
| 8 | VDC control | Fault | IDLE | Shedding |
| 9 | MPPT | VDC control (INV) | Charge with IB,Max | Normal/Reconnection |
| 10 | VDC control | Fault | Charge with IB,Max | Normal/Reconnection |
| Mode | Wind Power Agent | Grid Agent | Battery Agent | Load Agent |
|---|---|---|---|---|
| 1 | VDC control | Fault | IDLE | Normal/Reconnection |
| 2 | MPPT | Fault | VDC control by charging | Normal/Reconnection |
| 3 | MPPT | VDC control (INV) | IDLE | Normal/Reconnection |
| 4 | MPPT | VDC control (CON) | Charge with IB,Max | Normal/Reconnection |
| 5 | MPPT | VDC control (CON) | Charge with IB,Max | Normal/Reconnection |
| 6 | MPPT | VDC control (CON) | IDLE | Normal/Reconnection |
| 7 | MPPT | Fault | VDC control by discharging | Normal/Reconnection |
| 8 | VDC control | Fault | IDLE | Shedding |
| 9 | MPPT | VDC control (INV) | Charge with IB,Max | Normal/Reconnection |
| 10 | VDC control | Fault | Charge with IB,Max | Normal/Reconnection |
| 11 | MPPT | IDLE | VDC control by discharging | Normal/Reconnection |
| Unit | Parameters | Symbol | Value |
|---|---|---|---|
| Grid agent | Grid voltage | 220 V | |
| Grid frequency | 60 Hz | ||
| Transformer | T | 380/220 V | |
| Inverter-side inductance of LCL filter | 1.7 mH | ||
| Inverter-side resistance of LCL filter | 0.5 Ω | ||
| Grid-side inductance of LCL filter | 1.7 mH | ||
| Grid-side resistance of LCL filter | 0.5 Ω | ||
| Filter capacitance of LCL filter | 4.5 μF | ||
| Wind power agent | PMSG stator resistance | 0.64 Ω | |
| PMSG dq-axis inductance | 0.82 mH | ||
| PMSG number of poles | 6 | ||
| PMSG inertia | 0.111 kgm2 | ||
| PMSG flux linkage | 0.18 Wb | ||
| Converter filter inductance | 7 mH | ||
| Converter filter resistance | 0.2 Ω | ||
| Battery agent | Maximum allowable current | IB,Max | 3 A |
| Maximum SOC | SOCmax | 90% | |
| Minimum SOC | SOCmin | 20% | |
| Rated capacity | C | 30 Ah | |
| Maximum voltage | 265 V | ||
| Converter filter inductance L | 7 mH | ||
| Load agent | Power of load 1 | 200 W | |
| Power of load 2 | 200 W | ||
| Priority level: load 1 > load 2 | - | - | |
| DC-link | Nominal voltage | 400 V | |
| Capacitance | 4 mF |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padhilah, F.A.; Kim, K.-H. A Power Flow Control Strategy for Hybrid Control Architecture of DC Microgrid under Unreliable Grid Connection Considering Electricity Price Constraint. Sustainability 2020, 12, 7628. https://doi.org/10.3390/su12187628
Padhilah FA, Kim K-H. A Power Flow Control Strategy for Hybrid Control Architecture of DC Microgrid under Unreliable Grid Connection Considering Electricity Price Constraint. Sustainability. 2020; 12(18):7628. https://doi.org/10.3390/su12187628
Chicago/Turabian StylePadhilah, Faris Adnan, and Kyeong-Hwa Kim. 2020. "A Power Flow Control Strategy for Hybrid Control Architecture of DC Microgrid under Unreliable Grid Connection Considering Electricity Price Constraint" Sustainability 12, no. 18: 7628. https://doi.org/10.3390/su12187628
APA StylePadhilah, F. A., & Kim, K.-H. (2020). A Power Flow Control Strategy for Hybrid Control Architecture of DC Microgrid under Unreliable Grid Connection Considering Electricity Price Constraint. Sustainability, 12(18), 7628. https://doi.org/10.3390/su12187628