An Analysis of the Interactions between Adjustment Factors of Saturation Flow Rates at Signalized Intersections


Abstract
:1. Introduction
2. Literature Review
2.1. Existing Capacity Manuals for Signalized Intersections
2.2. Adjustment Factors
3. Data Collection and Analysis
3.1. Research Framework
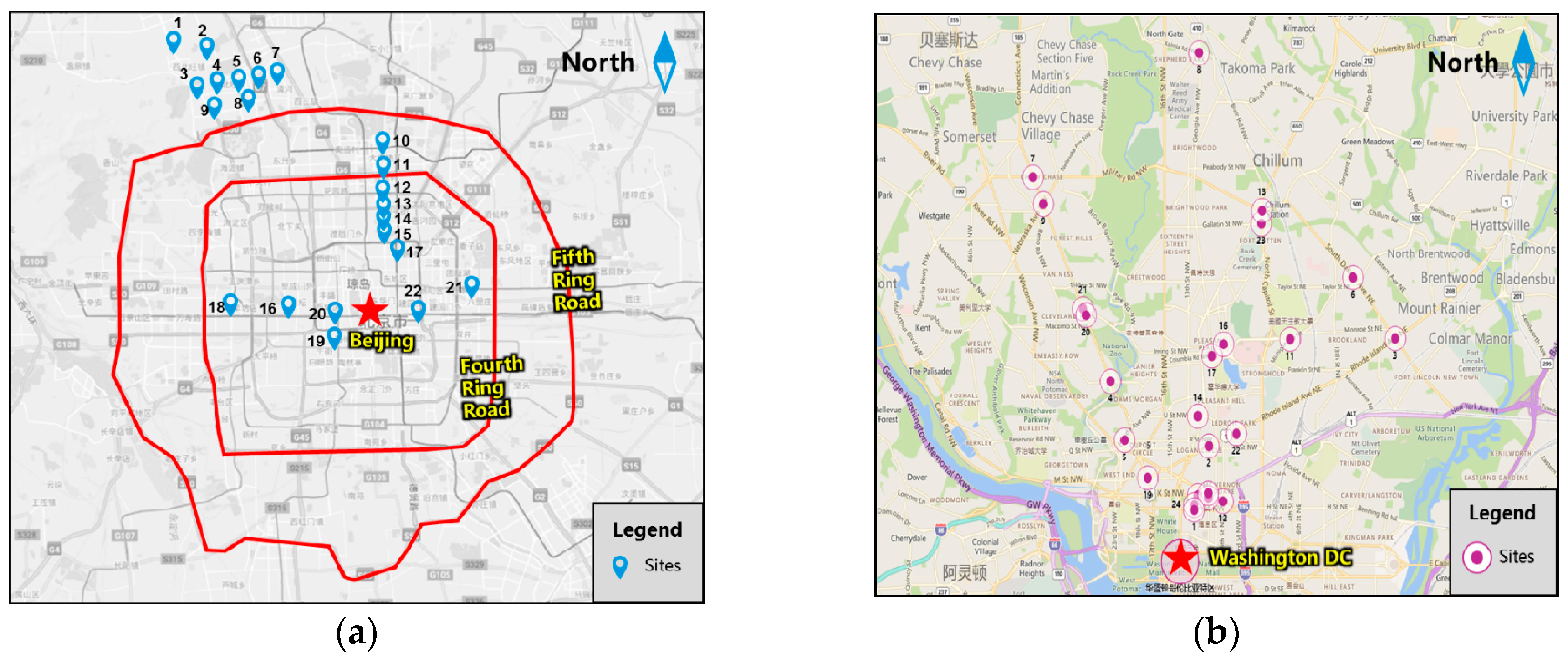
3.2. Study Site
- ⮚
- Intersection approach grades were level;
- ⮚
- No curb parking on the approaches;
- ⮚
- No bus stop near the approaches;
- ⮚
- The intersection approaches surveyed were on four-lane (or more) divided roadways to prevent the influence of the number of lanes in a lane group;
- ⮚
- No pedestrian or bicycle activity during the green phase on the surveyed approach
- ⮚
- Intersections were located in urban areas outside of Central Business District (CBD).
3.3. Collection Method
3.4. Data Reduction
4. Results and Discussion
4.1. Data Summary
4.2. Satruation Flow Rate Field Observation versus Conventional Method
4.3. Interaction between Adjustment Factors Verifications
4.4. Saturation Flow Rate Model Considering the Intersection
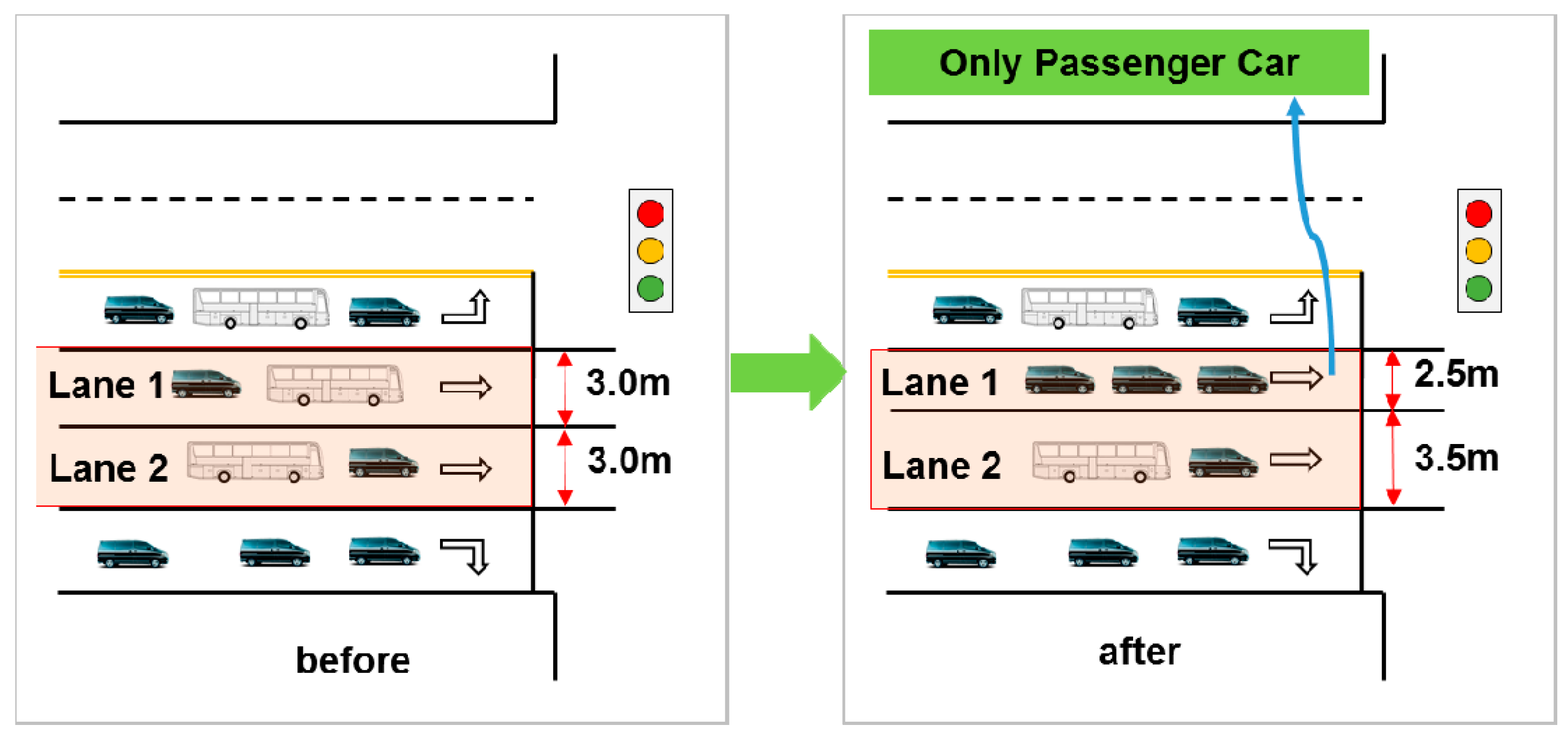
4.5. Application
5. Conclusions
- ⮚
- The adjustment factors were nonindependent. There was an interaction between them.
- ⮚
- The influence of percentage of heavy vehicles on saturation flow rate was more obvious in narrow lanes than in wide lanes.
- ⮚
- The influence of proportion of left-turning vehicles on saturation flow rate was more obvious in narrow lanes than in wide lanes.
- ⮚
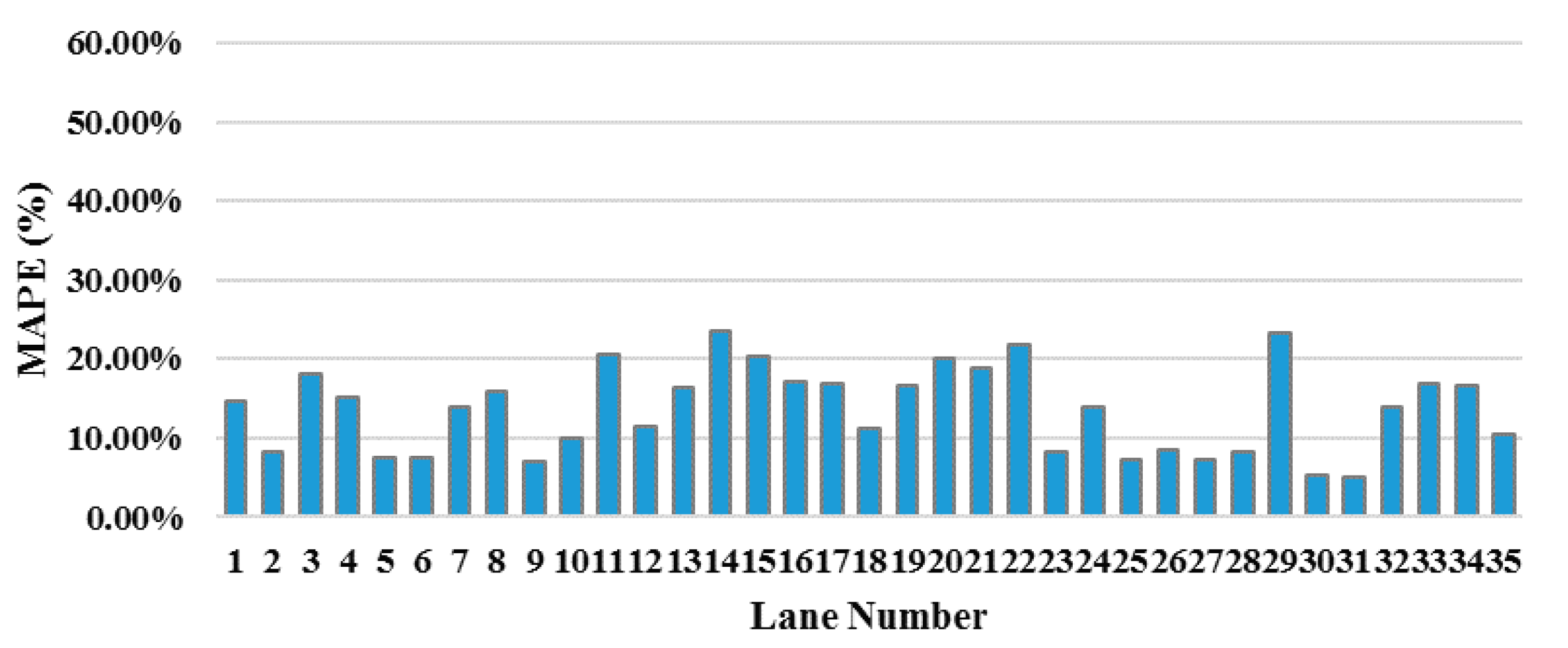
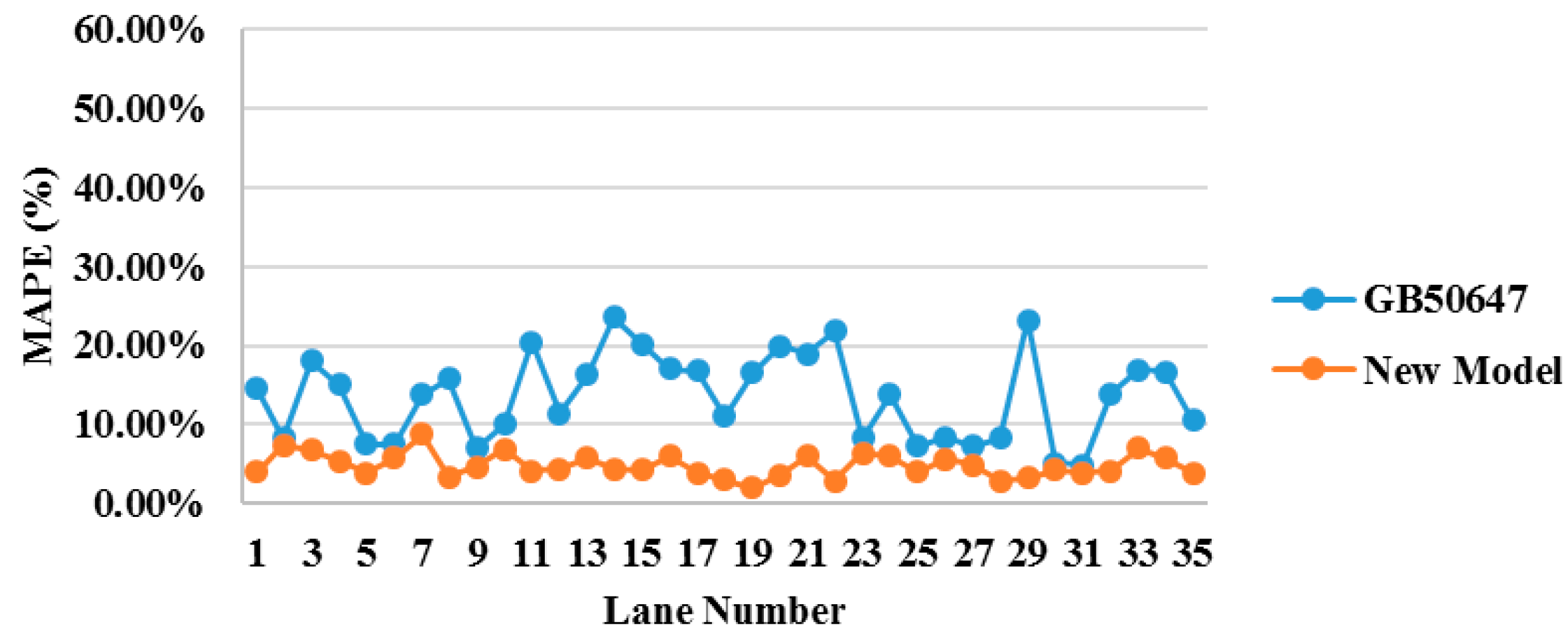
- Two new comprehensive adjustment factor models were built by multiple linear regression (MLR) method. In Beijing, the mean absolute percentage error (MAPE) was reduced to 4.89% down from 13.64%. In Washington, DC, the MAPE was reduced to 14.56% down from 33.16%.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, J.; Ma, W.; Xu, H. Increasing the Capacity of the Intersection Downstream of the Freeway Off-Ramp Using Presignals. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 674–690. [Google Scholar] [CrossRef]
- Beijing Transport Institute. 2019 Beijing Transport Annual Report; Beijing Transport Institute: Beijing, China, 2019; pp. 1–2. [Google Scholar]
- Xia, X.; Ma, X.; Wang, J. Control Method for Signalized Intersection with Integrated Waiting Area. Appl. Sci. 2019, 9, 968. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Li, G.; Pang, S.S.; Yang, X.; Tian, J. Signal timing of intersections using integrated optimization of traffic quality, emissions and fuel consumption: A note. Transp. Res. D Transp. Environ. 2004, 9, 401–407. [Google Scholar] [CrossRef]
- Zhao, H.; He, R.; Jia, X. Estimation and Analysis of Vehicle Exhaust Emissions at Signalized Intersections Using a Car-Following Model. Sustainability 2019, 11, 3992. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Liu, Y.; Wang, T. Increasing signalized intersection capacity with unconventional use of special width approach lanes. Comput. Aided Civ. Infrastruct. Eng. 2016, 31, 794–810. [Google Scholar] [CrossRef]
- Qin, Z.; Zhao, J.; Liang, S.; Yao, J. Impact of Guideline Markings on Saturation Flow Rate at Signalized Intersections. J. Adv. Transp. 2019, 2019, 1–14. [Google Scholar] [CrossRef]
- Xuan, Y.; Carlos, F.D.; Michael, J.C. Increasing the capacity of signalized intersections with separate left turn phases. Transp. Res. B Methodol. 2011, 45, 769–781. [Google Scholar] [CrossRef]
- Yan, C.; Jiang, H.; Xie, S. Capacity optimization of an isolated intersection under the phase swap sorting strategy. Transp. Res. B Methodol. 2014, 60, 85–106. [Google Scholar] [CrossRef]
- Transportation Research Board. Highway Capacity Manual; National Research Council: Washington, DC, USA, 2010; p. 34. ISBN 978-0-309-16077-3. [Google Scholar]
- Shao, C.; Liu, X. Estimation of saturation flow rates at signalized intersections. Discret. Dyn. Nat. Soc. 2012, 2012, 1–10. [Google Scholar] [CrossRef]
- TRRL (Transport and Road Research Laboratory). The Prediction of Saturation Fows for Road Junctions Controlled by Traffic Signals; TRRL: Wokingham, UK, 1986; p. 3. ISBN 0266-5247. [Google Scholar]
- ARRB (The Australian Road Research Board). Traffic Signals: Capacity and Timing Analysis; ARRB: Melbourne, Victoria, Australia, 1981; p. 1. ISBN 1445-4467. [Google Scholar]
- Tarko, A.P.; Marian, T. Uncertainty in saturation flow predictions. Red 2000, 1, 2. [Google Scholar]
- Transportation Research Board. Highway Capacity Manual; National Research Council: Washington, DC, USA, 2016; p. 34. ISBN 978-0-309-37000-4. [Google Scholar]
- Committee on the Canadian Capacity Guide for Signalized Intersections. Canadian Capacity Guide for Signalized Intersections; Institute of Transportation Engineers: Washington, DC, USA, 2008; pp. 42–68, ISBN-10 1-933452-24-2. [Google Scholar]
- Forschungsgesellschaft für Straßen- und Verkehrswesen (FGSV). Handbuch für die Bemessung von Straßenverkehrsanlagen (HBS); FGSV: Köln, Germany, 2015; pp. 80–90. ISBN 978-3-86446-103-3. [Google Scholar]
- Council of Scientific and Industrial Research (CSIR). Indian Highway Capacity Manual (Indo-HCM); CSIR: New Delhi, India, 2017; p. 39. [Google Scholar]
- Tongji University. Code for Planning of Intersections on Urban Roads (GB50647-2011); China Planning Press: Beijing, China, 2011; p. 77. [Google Scholar]
- Zegeer, J.D. Field validation of intersection capacity factors. Transp. Res. Rec. 1986, 1901, 67–68. [Google Scholar]
- Potts, I.B.; Ringert, J.F.; Bauer, K.M.; Zegeer, J.D.; Harwood, D.W.; Gilmore, D.K. Relationship of lane width to saturation flow rate on urban and suburban signalized intersection approaches. Transp. Res. Rec. 2007, 2027, 45–51. [Google Scholar] [CrossRef]
- Hung, W.T.; Tian, F.; Tong, H.Y. Discharge headway at signalized intersections in Hong Kong. J. Adv. Transp. 2003, 37, 105–117. [Google Scholar] [CrossRef]
- Radhakrishnan, P.; Tom, V. Mathew. Passenger car units and saturation flow models for highly heterogeneous traffic at urban signalized intersections. Transportmetrica 2011, 7, 141–162. [Google Scholar] [CrossRef]
- Biswas, S.; Chakraborty, S.; Ghosh, I.; Chandra, S. Saturation flow model for signalized intersection under mixed traffic condition. Transp. Res. Rec. 2018, 2672, 55–65. [Google Scholar] [CrossRef]
- Kimber, R.M.; McDonald, M.; Hounsell, N. Passenger car units in saturation flows: Concept, definition, derivation. Transp. Res. B Methodol. 1985, 19, 39–61. [Google Scholar] [CrossRef]
- Venkatesan, K.; Asaithambi, G.; Sivanandan, R. Development of microscopic simulation model for heterogeneous traffic using object oriented approach. Transportmetrica 2008, 4, 227–247. [Google Scholar] [CrossRef]
- Levinson, H.S. Capacity of Shared Left-turn Lanes-A Simplified Approach. Transp. Res. Rec. 1989, 1225, 45–47. [Google Scholar]
- Chen, P.; Qi, H.; Sun, J. Investigation of saturation flow on shared right-turn lane at signalized intersections. Transp. Res. Rec. 2014, 2461, 66–75. [Google Scholar] [CrossRef]
- Lin, F. Saturation flow and capacity of shared permissive left-turn lane. J. Transp. Eng. 1992, 118, 611–630. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhuang, H. Traffic performance in signalized intersection with shared lane and left-turn waiting area established. J. Transp. Eng. 2011, 138, 852–862. [Google Scholar] [CrossRef]
- Tsao, S.; Chu, S. Adjustment factors for heavy vehicles at signalized intersections. J. Transp. Eng. 1995, 121, 150–157. [Google Scholar] [CrossRef]
- Lewis, E.E.; Rahim, F.B. Saturation flow rate study at signalized intersections in Panama. In Proceedings of the 86th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 21–25 January 2007. [Google Scholar]
- Bonneson, J.A. Modeling Queued Driver Behavior at Signalized Junctions. Transp. Res. Rec. 1992, 1, 99. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | Intersection Name | Surveyed Approach | Subject Lane | Lane Width (m) |
|---|---|---|---|---|
| 1 | Yongfeng Rd. and Xibeiwang Rd. | SB | 2 TH | 3.30 |
| NB | 1 TH | 3.30 | ||
| 2 | Houchangcun Rd. and Tangjialing Rd. | EB | 1 TH | 3.30 |
| 3 | Mlianwabei Rd. and Zhuyuanzhong St. | WB | 1 TH | 4.00 |
| 4 | Mlianwabei Rd. and Dongbeiwangxi Rd. | WB | 1 TH | 3.60 |
| EB | 1 TH | 3.30 | ||
| 5 | Mlianwabei Rd. and Dongbeiwang Rd. | EB | 1 TH | 4.00 |
| WB | 1 TH | 3.60 | ||
| 6 | Mlianwabei Rd. and Xianghuangqidong Rd. | EB | 2 TH | 3.60 |
| WB | 2 TH | 3.60 | ||
| 7 | Shangdidong Rd. and Shangdi 3rd St. | EB | 2 TH | 3.60 |
| 8 | Nongdanan Rd. andShucun Rd. | WB | 1 TH | 3.00 |
| EB | 1 TH | 3.30 | ||
| 9 | China Agricultural University South Gate | EB | 2 TH | 3.30 |
| WB | 1 TH | 3.00 | ||
| 10 | Anli Rd. and Waiguanxie St. | SB | 1 TH | 3.00 |
| 11 | Anli Rd. and Huizhongbei Rd. | SB | 1 TH | 3.00 |
| 12 | Anli Rd. and Anyuan Rd. | SB | 1 TH | 3.30 |
| 13 | Anli Rd. and Hepinglibei St. | SB | 1 TH | 3.30 |
| 14 | Anli Rd. and Datun Rd. | SB | 1 TH | 3.00 |
| 15 | Anli Rd. and Huizhong Rd. | SB | 1 TH | 3.60 |
| 16 | Baiyun Rd. and Sanlihedong Rd. | WB | 1 TH | 3.30 |
| 17 | Dongzhimennei St. and Yonghegong St. | EB | 2 TH | 2.50 |
| 18 | Xicui Rd. and Fuxing Rd. | WB | 2 TH | 2.70 |
| 19 | Nanheng St. and Caishikou St. | EB | 1 TH | 3.60 |
| 20 | Changchun St. and Xuanwummenxi St. | WB | 1 TH | 3.00 |
| 21 | Jintai Rd. and Chaoyangbei Rd. | EB | 1 TH | 3.00 |
| 22 | Beiijngzhan St. and Jianguomennei St. | EB | 1 TH | 3.30 |
| NO. | Intersection Name | Surveyed Approach | Subject Lane | Lane Width (ft) |
|---|---|---|---|---|
| 1 | 12th Street and H Street NW | WB | 1 TH–LT | 10.4 |
| 2 | 9th Street and Rhode Island Avenue NW | NB | 1 TH–LT | 10.5 |
| 3 | Rhode Island Avenue | SB | 1 TH–LT | 10 |
| 4 | Connecticut Avenue and Calvert Street NW | SB | 1 TH–LT | 9.7 |
| 5 | R street and Florida Avenue NW | SB | 1 TH–LT | 11.5 |
| 6 | South Dakota Avenue and Michigan Avenue NE | EB | 1 TH–LT | 11.1 |
| 7 | Connecticut Avenue and Military Road | SB | 1 TH–LT | 9.5 |
| 8 | Eastern Avenue and Georgia Avenue NW | NB | 1 TH–LT | 10.3 |
| 9 | Connecticut Avenue and Nebraska Avenue NW | NB | 1 TH–LT | 9.8 |
| 10 | 9th Street and Mt Vernon Place NW | NB | 1 TH–LT | 10.1 |
| 11 | Harewood Road and Michigan Avenue | SB | 1 TH–LT | 9.7 |
| 12 | 6th Street and Massachusetts Avenue NW | WB | 1 TH–LT | 13.6 |
| 13 | Riggs Road and Rock Creek Church RD NE | EB | 1 TH–LT | 10.8 |
| 14 | 11th Street and U street NW | WB | 1 TH–LT | 9.7 |
| 15 | 9th street and New York Avenue NW | WB | 1 TH–LT | 12.5 |
| 16 | Warder Street and Kenyon Street NW | SB | 1 TH–LT | 11.4 |
| 17 | Columbia Avenue and Georgia Avenue | EB | 1 TH–LT | 11 |
| 18 | 11th Street and K street NW | NB | 1 TH–LT | 13.5 |
| 19 | Connecticut Avenue and Rhode Island Avenue | WB | 1 TH–LT | 9.6 |
| 20 | Connecticut Avenue and Ordway Street NW | NB | 1 TH–LT | 12.1 |
| 21 | Connecticut Avenue and Porter Street | WB | 1 TH–LT | 11 |
| 22 | Florida Avenue and 4th Street NE | WB | 1 TH–LT | 11.9 |
| 23 | North Capitol and Gallatin Street | SB | 1 TH–LT | 9.1 |
| 24 | 12th Street and New York Avenue NW | WB | 1 TH–LT | 11.2 |
| SB | 1 TH–LT | 10.5 |
| Intersection: Anli Rd. and Datun Rd. (Southbound) | ||||||
|---|---|---|---|---|---|---|
| Data: 2017-07-11 | Lane width: 3.00 m | Location: middle | ||||
| Time: 16:30~19:00 | ||||||
| Cycle | T4 (s) 1 | Tn (s) 2 | N3 | Number of Heavy Vehicles | The Percentage of Heavy Vehicles | Average Headway (s) |
| 1 | 10.84 | 25.67 | 10 | 0 | 0% | 2.47 |
| 2 | 11.1 | 27.3 | 12 | 1 | 8.33% | 2.03 |
| 3 | 16.33 | 33.59 | 10 | 2 | 20% | 2.88 |
| 4 | 11.92 | 23.46 | 10 | 0 | 0% | 1.92 |
| 5 | 16.22 | 36.49 | 10 | 3 | 30% | 3.38 |
| 6 | 13.69 | 31.35 | 11 | 1 | 9.09% | 2.52 |
| 7 | 13.04 | 35.99 | 14 | 0 | 0% | 2.30 |
| …… | …… | …… | …… | …… | …… | |
| 20 | 10.16 | 20.29 | 10 | 3 | 30% | 3.36 |
| Factors | HCM 1 | GB50647 2 |
|---|---|---|
| BSFR | Metro pop ≥ 250,000: 1900 pcu/h/ln Otherwise: 1750 pch/h/ln | Eastern cities: 1750 pcu/h/ln Central cities: 1650 pcu/h/ln Western cities: 1550 pcu/h/ln |
| Lane Width | <10.0 ft (3.05 m) 0.96 10.0–12.9 ft (3.9 m) 1.00 >12.9 ft (3.9 m) 1.04 | 2.70 m: 0.88 2.80 m: 0.92 2.90 m: 0.96 3.00 m: 1.00 3.25 m: 1.08 3.50 m: 1.14 3.75 m: 1.17 4.00 m: 1.18 |
| Percent Heavy Vehicles | ||
| Left Turn | - |
| Type III Sum of Squares | df 1 | Mean Square | F 2 | Sig. 3 | |
|---|---|---|---|---|---|
| Corrected Model | 232.520a | 35 | 6.643 | 274.735 | 0.000 |
| Intercept | 4998.605 | 1 | 6209.833 | 256803.731 | 0.000 |
| LW | 37.433 | 5 | 7.487 | 309.602 | 0.000 |
| PoHV | 174.237 | 5 | 34.847 | 1441.092 | 0.000 |
| LW*PoHV | 17.394 | 25 | 0.696 | 28.773 | 0.000 |
| Error | 20.312 | 840 | 0.024 | ||
| Total | 6972.074 | 876 | |||
| Corrected Total | 252.832 | 875 |
| Type III Sum of Squares | df 1 | Mean Square | F 2 | Sig. 3 | |
|---|---|---|---|---|---|
| Corrected Model | 49.564a | 21 | 2.360 | 7.763 | 0.000 |
| Intercept | 933.989 | 1 | 933.989 | 3071.966 | 0.000 |
| LW | 23.851 | 7 | 3.407 | 11.207 | 0.000 |
| PoLV | 9.269 | 2 | 4.635 | 15.244 | 0.000 |
| LW*PoLV | 8.011 | 12 | 0.668 | 2.196 | 0.011 |
| Error | 151.714 | 499 | 0.304 | ||
| Total | 4032.380 | 521 | |||
| Corrected Total | 201.279 | 520 |
| Model | Unstandardized Coefficients | t 3 | Sig. 4 | ||
|---|---|---|---|---|---|
| B 1 | Std. Error 2 | ||||
| Model 1 with Beijing Data | Constant | 2.690 | 0.065 | 41.570 | 0.000 |
| LW(1) | −0.131 | 0.020 | −6.506 | 0.000 | |
| PoHV | 6.928 | 0.260 | 26.686 | 0.000 | |
| LW*PoHV | −1.295 | 0.080 | −16.246 | 0.000 | |
| Model 2 with Washington Data | Constant | 2.861 | 0.306 | 9.346 | 0.000 |
| LW(2) | −0.032 | 0.029 | −1.105 | 0.270 | |
| PoLV | 3.283 | 1.294 | 2.538 | 0.011 | |
| LW*PoLV | −0.217 | 0.124 | −1.743 | 0.082 | |
| Model | R 1 | R Square 2 | Adjusted R Square 3 | Std. Error of the Estimate 4 |
|---|---|---|---|---|
| Model 1 | 0.939 | 0.881 | 0.881 | 0.186 |
| Model 2 | 0.391 | 0.153 | 0.148 | 0.574 |
| Original Design | Adjusted Design | |||
|---|---|---|---|---|
| Through Lane Group | Lane 1 | Lane 2 | Lane 1 | Lane 2 |
| Lane Width (m) | 3.0 | 3.0 | 2.5 | 3.5 |
| Base Saturation Flow Rate (pcu/h) | 1650 | 1650 | 1650 | 1650 |
| Proposed adjusted factor | 0.792 | 0.792 | 0.923 | 0.838 |
| Adjusted Saturation Flow Rate (veh/h) | 1306 | 1306 | 1523 | 1382 |
| Lane Group Adjusted Saturation Flow Rate (veh/h) | 2612 | 2905 | ||
| Average vehicle Delay (s) | 24.3 | 22.8 | ||
| Emissions Changes (g) | CO2: 40,000 | |||
| CO: 210.9 | ||||
| HC: 17.58 | ||||
| NOX: 26.37 | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Rong, J.; Zhou, C.; Chang, X.; Liu, S. An Analysis of the Interactions between Adjustment Factors of Saturation Flow Rates at Signalized Intersections. Sustainability 2020, 12, 665. https://doi.org/10.3390/su12020665
Wang Y, Rong J, Zhou C, Chang X, Liu S. An Analysis of the Interactions between Adjustment Factors of Saturation Flow Rates at Signalized Intersections. Sustainability. 2020; 12(2):665. https://doi.org/10.3390/su12020665
Chicago/Turabian StyleWang, Yi, Jian Rong, Chenjing Zhou, Xin Chang, and Siyang Liu. 2020. "An Analysis of the Interactions between Adjustment Factors of Saturation Flow Rates at Signalized Intersections" Sustainability 12, no. 2: 665. https://doi.org/10.3390/su12020665