An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach

Abstract
:1. Introduction
2. Literature Review
2.1. Driver Behavior Analysis and Prediction Models for Autonomous Vehicles
2.2. Cellular Automata Models for Traffic Flow Simulation
2.3. Driving Behavior among Different Genders
2.4. Driving Behavior among Different Age Groups
2.5. Differences in Reaction Time among Genders
2.6. Lane Change Behavior
- The physical possibility to change lanes;
- The location of permanent obstructions;
- The presence of transit lines;
- The driver’s intended turning movement;
- The presence of heavy vehicles;
- Speed [60].
3. Model Development
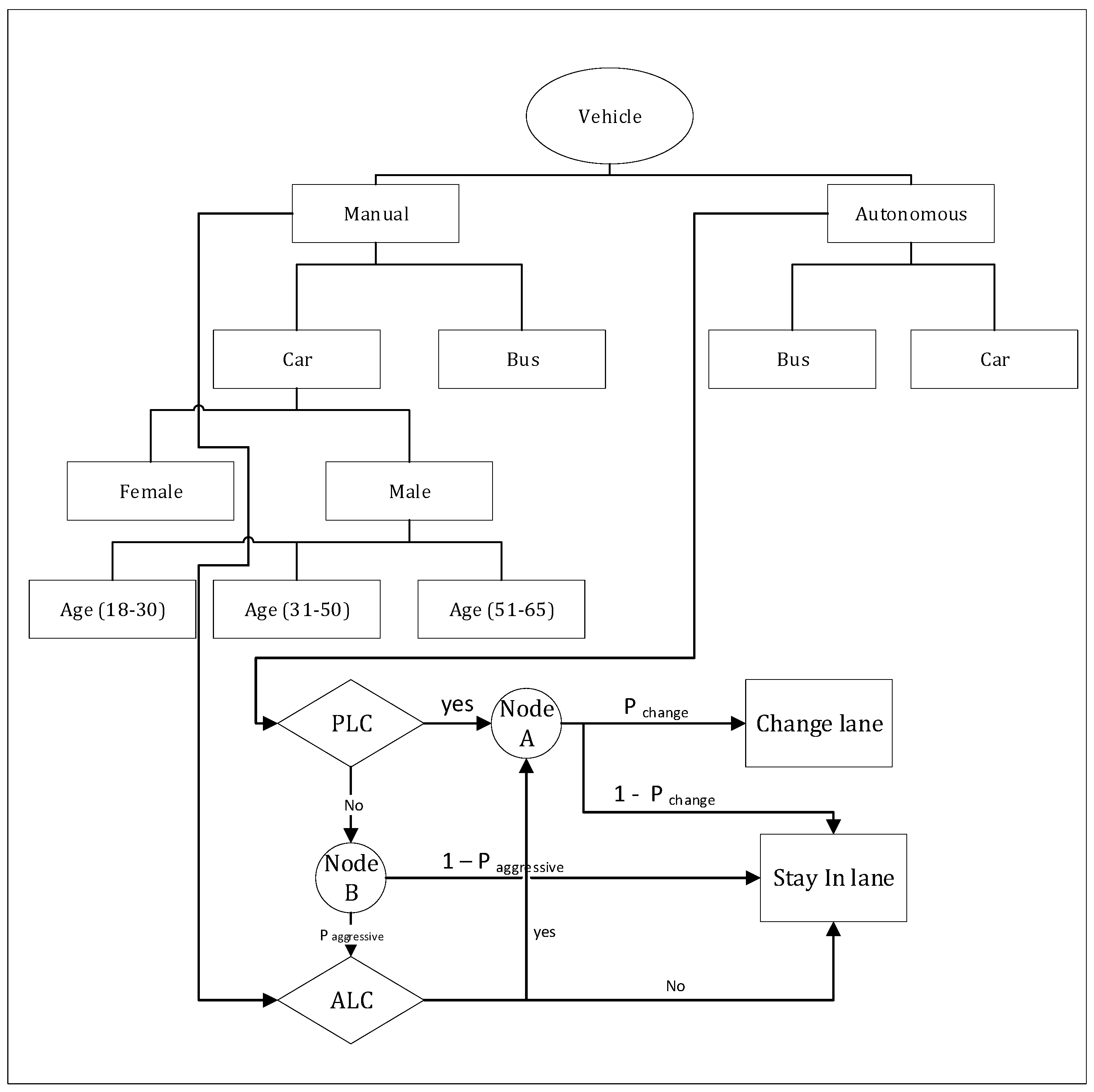
3.1. Lane Change Behavior
3.2. Polite Lane Change Policy
3.3. Aggressive Lane Change Policy
3.4. Numerical Simulation
4. Results
4.1. Scenario 1
4.2. Scenario 2
4.3. Scenario 3
4.4. Scenario 4
5. Discussions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Office of Highway Policy Information. Public Data for Highway Statistics; Office of Highway Policy Information: Washington, DC, USA, 2017.
- Center for Disease Control. Injury Prevention and Control: Data and Statistics; Center for Disease Control: Atlanta, GA, USA, 2011.
- Hayes, B. Leaving the driving to it. Am. Sci. 2011, 99, 362–366. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety. 2018. Available online: https://www.who.int/violence_injury_prevention/road_safety_status/2018/en/ (accessed on 17 June 2018).
- Chen, H.Y.; Ivers, R.; Martiniuk, A.; Boufous, S.; Senserrick, T.; Woodward, M.; Stevenson, M.; Norton, R. Socioeconomic status and risk of car crash injury, independent of place of residence and driving exposure: Results from the DRIVE Study. J. Epidemiol. Community Health 2010, 64, 998–1003. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.-H. Teenager Driver Crash Risk: The Effect of Passengers; Johns Hopkins University: Baltimore, MD, USA, 1999. [Google Scholar]
- Preusser, D.F.; Ferguson, S.A.; Williams, A.F. The effect of teenage passengers on the fatal crash risk of teenage drivers. Accid. Anal. Prev. 1998, 30, 217–222. [Google Scholar] [CrossRef]
- Elvik, R. Why some road safety problems are more difficult to solve than others. Accid. Anal. Prev. 2010, 42, 1089–1096. [Google Scholar] [CrossRef] [PubMed]
- McCartt, A.T.; Shabanova, V.I.; Leaf, W.A. Driving experience, crashes and traffic citations of teenage beginning drivers. Accid. Anal. Prev. 2003, 35, 311–320. [Google Scholar] [CrossRef]
- Vachal, K.; Faculty, R.; Malchose, D. What can we learn about North Dakota’s youngest drivers from their crashes? Accid. Anal. Prev. 2009, 41, 617–623. [Google Scholar] [CrossRef]
- Walsh, S.P.; White, K.M.; Hyde, M.; Watson, B. Dialling and driving: Factors influencing intentions to use a mobile phone while driving. Accid. Anal. Prev. 2008, 40, 1893–1900. [Google Scholar] [CrossRef] [Green Version]
- Harbeck, E.; Glendon, I. How reinforcement sensitivity and perceived risk influence young drivers’ reported engagement in risky driving behaviors. Accid. Anal. Prev. 2013, 54, 73–80. [Google Scholar] [CrossRef]
- Hancock, P. Are Autonomous Cars Really Safer than Human Drivers? Available online: https://www.scientificamerican.com/article/are-autonomous-cars-really-safer-than-human-drivers/ (accessed on 3 February 2018).
- University of Idaho. Traffic Flow Theory, Types of Traffic Flows. August 2003. Available online: http://www.webpages.uidaho.edu/niatt_labmanual/chapters/trafficflowtheory/theoryandconcepts/TypesOfTrafficFlow.htm (accessed on 6 April 2020).
- AbuAli, N.; Abou-Zeid, H. Driver behavior modeling: Developments and future directions. Int. J. Veh. Technol. 2016, 2016, 6952791. [Google Scholar] [CrossRef] [Green Version]
- Mamidi Kiran Kumar, V.K.P. Driver behavior analysis and prediction models. Int. J. Comput. Sci. Inf. Technol. 2015, 6, 3328–3333. [Google Scholar]
- Kumagai, T.; Sakaguchi, Y.; Okuwa, M.; Akamatsu, M. Prediction of driving behavior through probabilistic inference. In Proceedings of the 8th International Conference Engineering Applications of Neural Networks, Malaga, Spain, 8–10 September 2003. [Google Scholar]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Jin, S.; Wang, D.; Huang, Z.-Y.; Tao, P. Visual angle model for car-following theory. Phys. A Stat. Mech. Appl. 2011, 390, 1931–1940. [Google Scholar] [CrossRef]
- Jin, S.; Wang, D.-H.; Yang, X.-R. Non-lane-based car-following model with visual angle information. Transp. Res. Rec. 2011, 2249, 7–14. [Google Scholar] [CrossRef]
- Jin, S.; Wang, D.; Xu, C.; Huang, Z.-Y. Staggered car-following induced by lateral separation effects in traffic flow. Phys. Lett. A 2012, 376, 153–157. [Google Scholar] [CrossRef]
- Berling-Wolff, S.; Wu, J. Modeling urban landscape dynamics: A review. Ecol. Res. 2004, 19, 119–129. [Google Scholar] [CrossRef]
- Sven Maerivoet, B.D.M. Cellular automata models of road traffic. Phys. Rep. 2005, 419, 1–64. [Google Scholar] [CrossRef] [Green Version]
- Barlovic, R.J.E.; Froese, K.; Knospe, W.; Neubat, L.; Schreckenberg, M.; Wahle, J. Online Traffic Simulation with Cellular Automata. In Traffic and Mobility: Simulation-Economics-Environment, Institut für Kraftfahrwesen; RWTH Aachen: Duisburg, Germany, 1999; pp. 117–134. [Google Scholar]
- Chowdhury, D.A. Schadschneider, Statistical physics of vehicular traffic and some related systems. Phys. Rep. 2000, 329, 199–329. [Google Scholar] [CrossRef] [Green Version]
- Mu, R.; Yamamoto, T. An Analysis on Mixed Traffic Flow of Conventional Passenger Cars and Microcars Using a Cellular Automata Model. In Proceedings of the 8th International Conference on Traffic and Transportation Studies, Changsha, China, 1–3 August 2012. [Google Scholar]
- Wu, W.; Liu, Y.; Xu, Y.; Wei, Q.; Zhang, Y. Traffic Control models based on cellular automata for at-grade intersections in autonomous vehicle environment. J. Sens. 2017, 2017, 9436054. [Google Scholar] [CrossRef] [Green Version]
- Qu, X.; Yang, M.; Yang, F.; Ran, B.; Li, L. An Improved Single-Lane Cellular Automaton Model considering Driver’s Radical Feature. J. Adv. Transp. 2018, 2018, 3791820. [Google Scholar] [CrossRef]
- Gao, Y.; Zhou, Q.; Chai, C.; Wong, Y.D. Safety impact of right-turn waiting area at signalized junctions conditioned on driver’s decision-making based on fuzzy cellular automata. Accid. Anal. Prev. 2019, 123, 341–349. [Google Scholar] [CrossRef]
- Evans, L. Traffic Safety and the Driver; Science Serving Society; Van Nostrand Reinhold: New York, NY, USA, 1991. [Google Scholar]
- McKenna, F.P.; Waylen, A.; Burkes, M. Male and Female Drivers: How Different are They? TRB: Washington, DC, USA, 1998. [Google Scholar]
- Waylen, A.; McKenna, F. Cradle Attitudes-Grave Consequences-The Development of Gender Differences in Risky Attitudes and Behaviour in Road Use; TRB: Washington, DC, USA, 2002. [Google Scholar]
- Parker, D.; West, R.; Stradling, S.; Manstead, A. Behavioural characteristics and involvement in different types of traffic accident. Accid. Anal. Prev. 1995, 27, 571–581. [Google Scholar] [CrossRef]
- Lancaster, R.; Ward, R. The Contribution of Individual Factors to Driving Behaviour: Implications for Managing Workrelated Road Safety; Report No. 20; Health and Safety Executive: London, UK, 2002. [Google Scholar]
- Chipman, M.L.; MacGregor, C.G.; Smiley, A.M.; Lee-Gosselin, M. Time vs. distance as measures of exposure in driving surveys. Accid. Anal. Prev. 1992, 24, 679–684. [Google Scholar] [CrossRef]
- Waller, P.F.; Elliott, M.R.; Shope, J.T.; Raghunathan, T.E.; Little, R.J. Changes in young adult offense and crash patterns over time. Accid. Anal. Prev. 2001, 33, 117–128. [Google Scholar] [CrossRef]
- Norris, F.H.; Matthews, B.; Riad, J.K. Characterological, situational, and behavioral risk factors for motor vehicle accidents: A prospective examination. Accid. Anal. Prev. 2000, 32, 505–515. [Google Scholar] [CrossRef]
- Mizell, L.; Joint, M.; Connell, D. Aggressive Driving: Three Studies; TRB: Washington, DC, USA, 1997. [Google Scholar]
- Loughran, D.; Seabury, S.; Zakaras, L. What Risks Do Older Drivers Pose to Traffic Safety? RAND Corporation: Santa Monica, CA, USA, 2007. [Google Scholar]
- Federal Highway Administration. National Household Travel Survey; Federal Highway Administration: Washington, DC, USA, 2001.
- Tefft, B.C. Risks older drivers pose to themselves and to other road users. J. Saf. Res. 2008, 39, 577–582. [Google Scholar] [CrossRef]
- Staplin, L.; Lococo, K.H.; Martell, C.; Stutts, J. Taxonomy of Older Driver Behaviors and Crash Risk; National Highway Traffic Safety Administration: Washington, DC, USA, 2012.
- Fisk, D.; Charness, N.; Czaja, S.J.; Rogers, W.A.; Sharit, J. Designing for Older Adults: Principles and Creative Human Factors Approaches, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Ivers, R.; Senserrick, T.; Boufous, S.; Stevenson, M.; Chen, H.Y.; Woodward, M.; Norton, R. Novice drivers’ risky driving behavior, risk perception, and crash risk: findings from the DRIVE study. Am. J. Public Health 2009, 99, 1638–1644. [Google Scholar] [CrossRef]
- Ali, E.K.; El-Badawy, S.; Shawaly, E.A. Young drivers behaviour and its influence on traffic accidents. J. Traff. Logist. Eng. 2014, 2, 45–51. [Google Scholar] [CrossRef]
- Duke-Elder, S. Francisus cornelis donders. Br. J. Ophthalmol. 1959, 8, 43–65. [Google Scholar]
- Halpern, D.F. Sex Differences in Cognitive Abilities; Erlbaum: Hillsdale, NJ, USA, 1992. [Google Scholar]
- Herlitz, A.; Love´n, J. Sex differences in cognitive functions. Acta Psychol. Sin. 2009, 41, 1081–1090. [Google Scholar]
- Reed, T.; Vernon, P.A.; Johnson, A.M. Sex difference in brain nerve conduction velocity in normal humans. Neuropsychologia 2004, 42, 1709–1714. [Google Scholar] [CrossRef]
- Lahtela, K.; Niemi, P.; Kuusela, V. Adult visual choice-reaction time, age, sex and preparedness: A test of Welford’s problem in a large population sample. Scand. J. Psychol. 1985, 26, 357–362. [Google Scholar] [CrossRef] [PubMed]
- Bunce, D.; Tzur, M.; Ramchurn, A.; Gain, F.; Bond, F.W. Mental health and cognitive function in adults aged 18 to 92 years. J. Geronto. Ser. B Psychol. Sci. 2008, 63, 67–74. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fairweather, H.; Hutt, S.J. Sex differences in a perceptual-motor skill in children. In Gender Differences: Their Ontogeny and Significance; Churchill Livingstone: Edinburgh, UK, 1972; pp. 159–175. [Google Scholar]
- Deary, I.J.; Der, G. Reaction time, age and cognitive ability: Longitudinal findings from age 16 to 63 years in representative population samples. Aging Neurosci. Cogn. 2005, 12, 187–215. [Google Scholar] [CrossRef]
- Dykiert, D.; Der, G.; Starr, J.M.; Deary, I.J. Sex Differences in reaction time mean and intraindividual variability across the life Span. Dev. Psychol. 2012, 48, 1262–1276. [Google Scholar] [CrossRef]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Non-linear follow the leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Newell, G.F. Non-linear effects in the dynamics of car following. Oper. Res. 1961, 9, 209–229. [Google Scholar] [CrossRef]
- Van Winsum, W.; De Waard, D.; Brookhuis, K. Lane change manoeuvres and safety margins. Transp. Res. Transp. Res. 1999, 2, 139–149. [Google Scholar] [CrossRef]
- Zheng, Z.; Ahn, S.; Monsere, C.M. Impact of traffic oscillations on freeway crash occurrences. Accid. Anal. Prev. 2010, 42, 626–636. [Google Scholar] [CrossRef] [Green Version]
- Sen, B.; Smith, J.D.; Najm, W.G. Analysis of Lane Change Crashes; John, A., Ed.; Volpe National Transportation Systems Center: Cambridge, MA, USA, 2003.
- Gipps, P.G. A model for the stucture of lane chaning models. Transp. Res. B 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Hidas, P. Modelling lane changing and merging in microscopic traffic simulation. Transp. Res. Part C 2002, 10, 351–371. [Google Scholar] [CrossRef]
- George Oketch, T. New modeling approach for mixed-traffic streams with nonmotorized vehicles. Transp. Res. Rec. 2000, 1705, 61–69. [Google Scholar] [CrossRef]
- Lee, S.E.; Olsen, E.C.; Wierwille, W.W. A Comprehensive Examination of Naturalistic Lane-Changes; National Highway Traffic Safety Administration: Washington, DC, USA, 2004.
- Kim, S.-W.; Liu, W. Cooperative autonomous driving: A mirror neuron inspired intention awareness and cooperative perception approach. IEEE Intell. Transp. Syst. Mag. 2016, 8, 23–32. [Google Scholar] [CrossRef]
- Fei, L.; Zhu, H.; Han, X. Analysis of traffic congestion induced by the work zone. Phys. A Stat. Mech. Appl. 2016, 450, 497–505. [Google Scholar] [CrossRef]
- Highway, A.A.O.S.; Officials, T. A Policy on Geometric Design of Highways and Streets; American Association of State Highway Offical Transportation: Washington, DC, USA, 2011. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Abbreviation |
|---|---|
| Represents the current position of the n-th vehicle | |
| Represents the current position of the i-th vehicle | |
| Represents the speed of the n-th vehicle | |
| (t) | Represents the speed of the n-th vehicle at time instant t. |
| Represents the maximum speed of the vehicle | |
| Represents the front distance of the vehicle on the same lane | |
| Represents the length of the vehicle | |
| Represents the left side front distance of the vehicle in the target lane | |
| Represents the right front distance of the vehicle in the target lane | |
| Represents the left back distance of the n-th vehicle in the target lane | |
| Represents the right back distance of the n-th vehicle in the target lane |
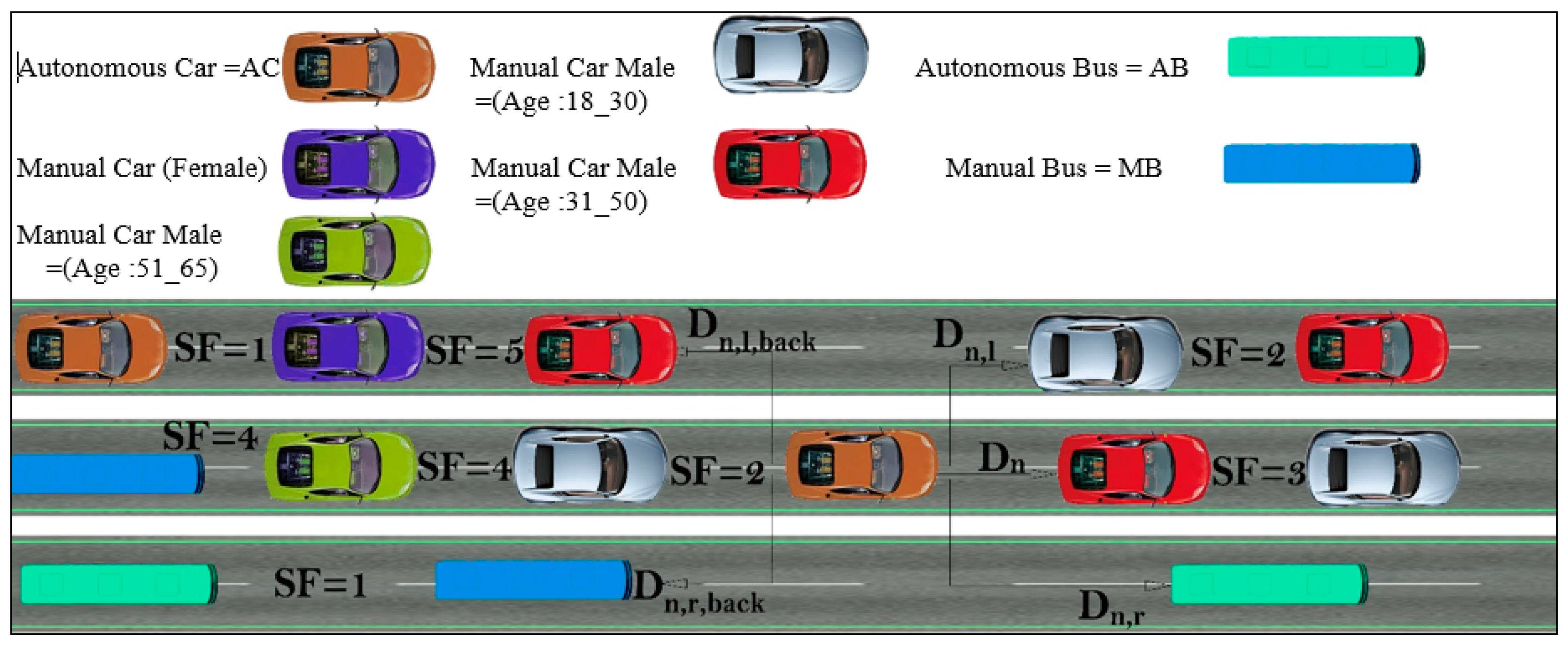
| Class Gender | Vehicle Type | Class Age | Speed (Km/h) | SD (m) | Front and Back Distance in the Target Lane (m) | Reaction Time (See) |
|---|---|---|---|---|---|---|
| Anyone | AC | Any | 80 | 1 cell | ≥2 cells | 1 |
| Anyone | AB | Any | 60 | 1 cell | ≥2 cells | 1 |
| Female | MC | Any | 80 | 5 cells | ≥5 cells | 5 |
| Male | MC | 18-30 | 80 | 2 cells | ≥3 cells | 2 |
| MC | 31-50 | 80 | 3 cells | ≥4 cells | 3 | |
| MC | 51-65 | 80 | 4 cells | ≥5 cells | 4 | |
| MB | Any | 60 | 4 cells | ≥5 cells | 4 |
| Scenarios | Composition |
|---|---|
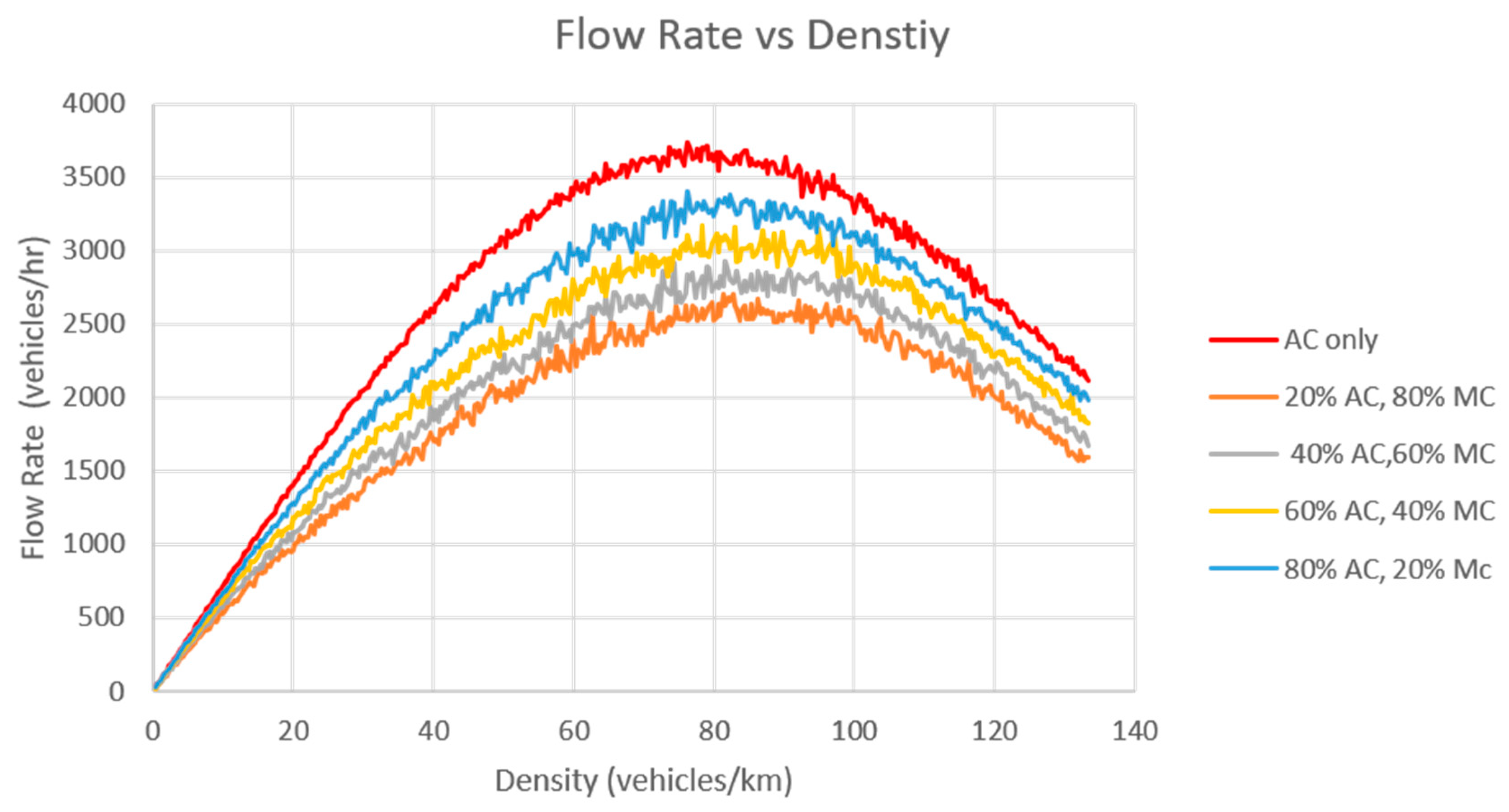
| Scenario 1 | 100% AC, 20% AC + 80% MC, 40% AC + 60% MC, 60% AC + 40% MC, 20% AC + 80% MC with ALC = 0.5 and PLC = 0.5 |
| Scenario 2 | 90% AC + 10% AB, 90% AC + 10% MB, 90% MC + 10% AB, 90% MC + 10% MB with ALC = 0.5 and PLC = 0.5 |
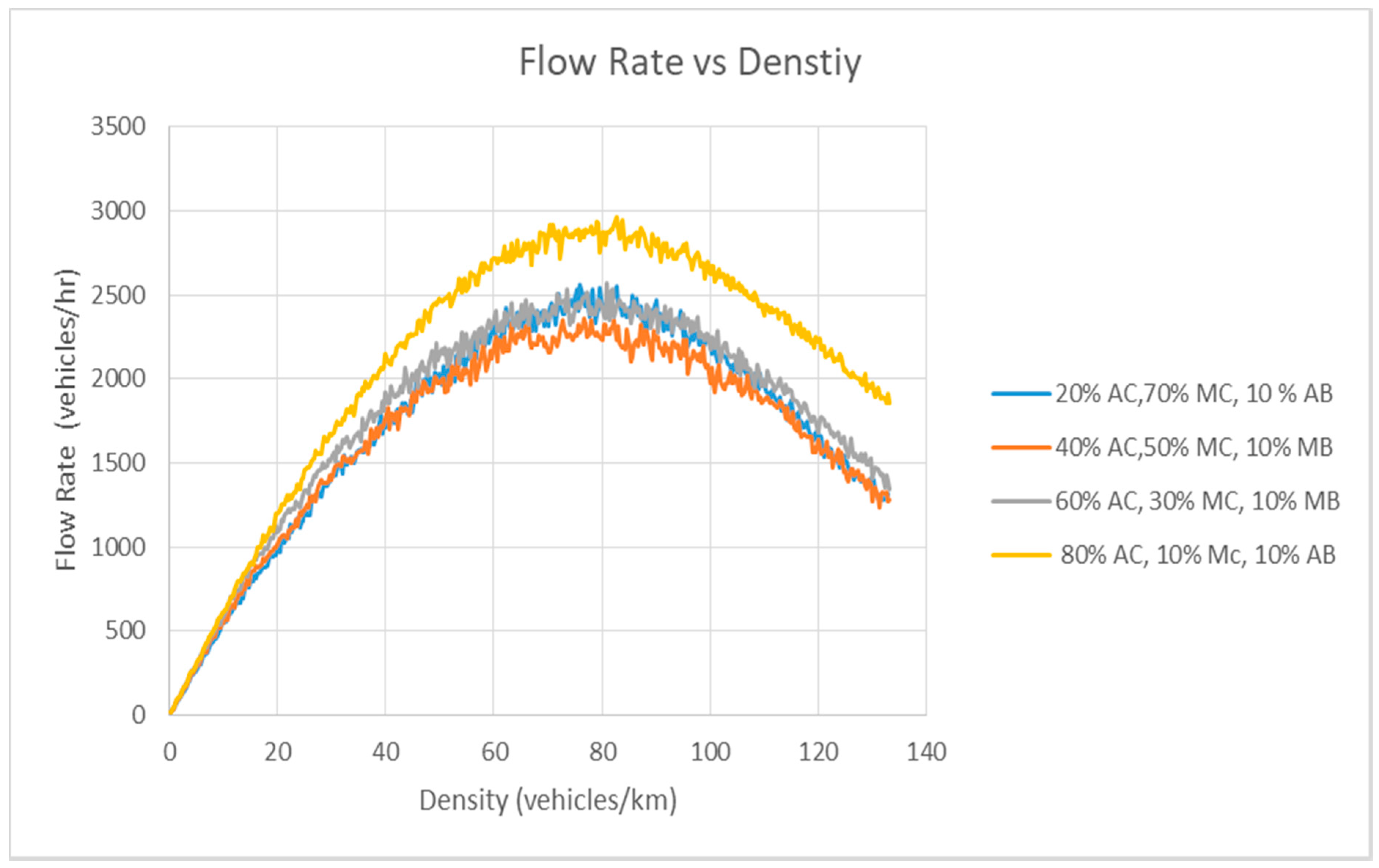
| Scenario 3 | 20% AC + 70% AC + 10% AB, 40% AC + 50% MC + 10%MB, 60% AC + 30% MC + 10%MB, 80%AC + 10%MC + 10%AB with ALC=0.5 and PLC=0.5 |
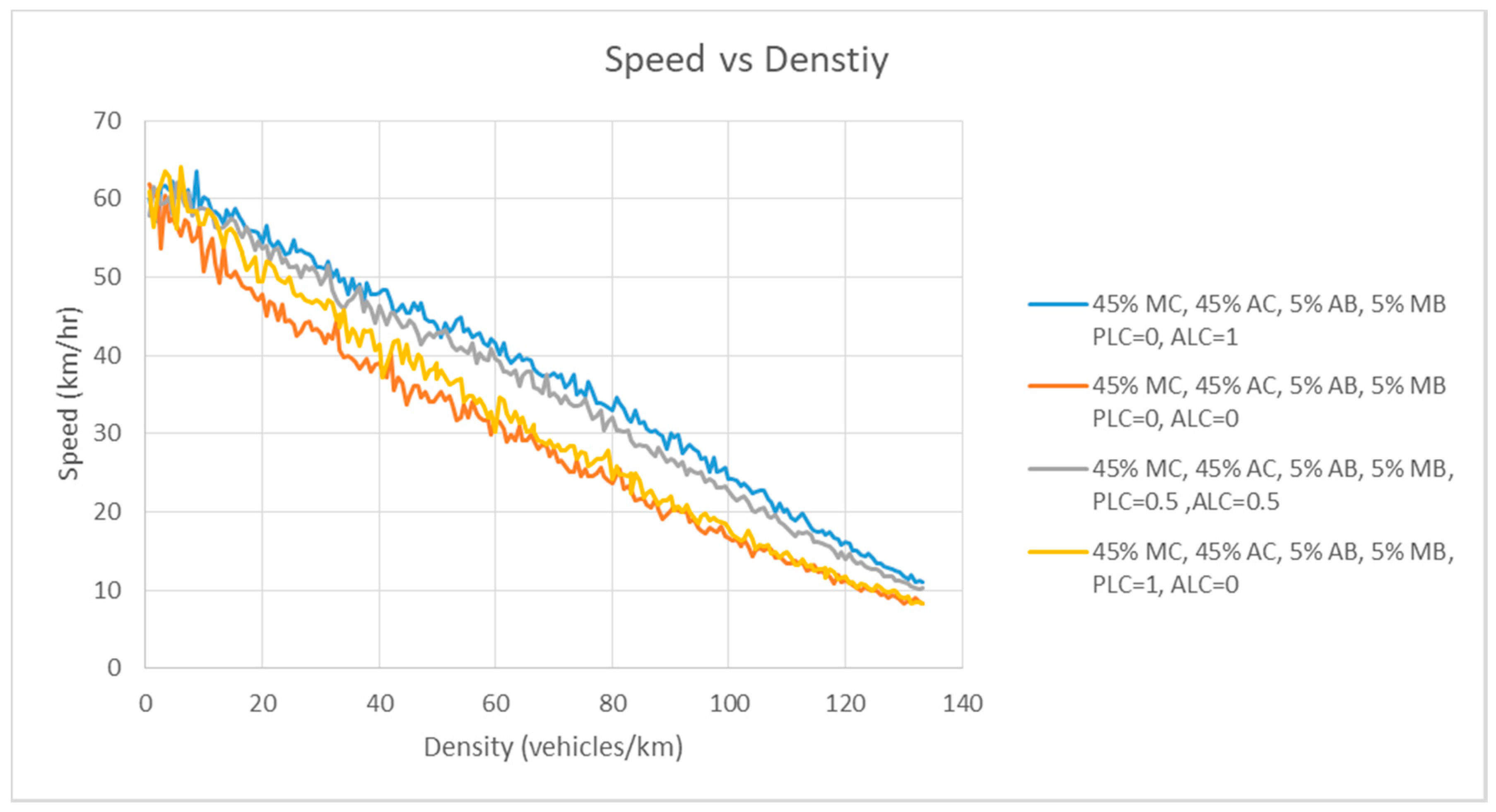
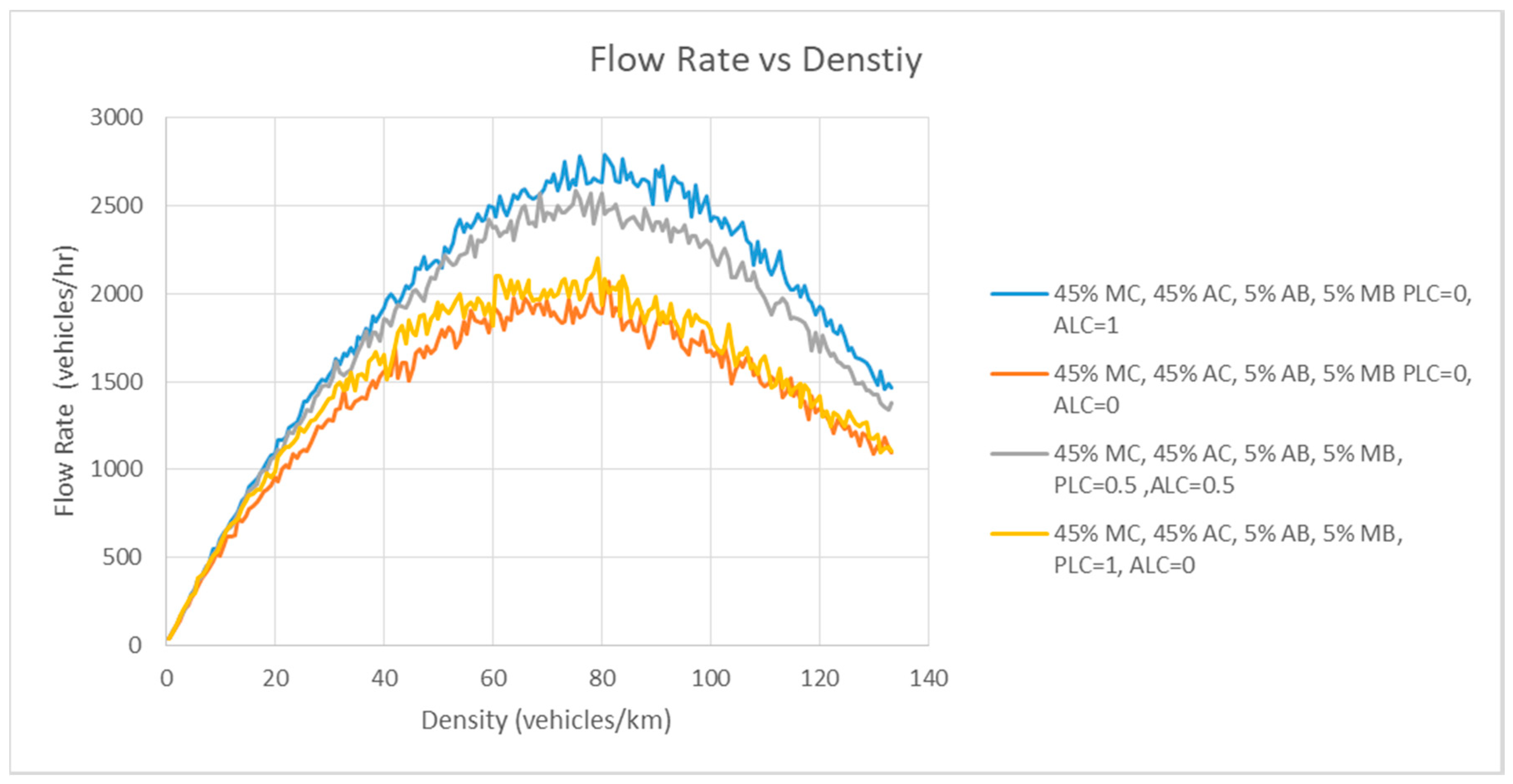
| Scenario 4 | 45% MC + 45% AC+ 5% AB + 5% MB PLC = 0 ALC = 1, 45% MC + 45% AC+ 5% AB+ 5% MB PLC = 0 ALC = 0, 45% MC + 45% AC + 5% AB + 5% MB PLC = 0.5 ALC = 0.5, 45% MC + 45% AC+ 5% AB + 5% MB PLC = 1 ALC = 1 |
| Scenario No. | Major Conclusion |
|---|---|
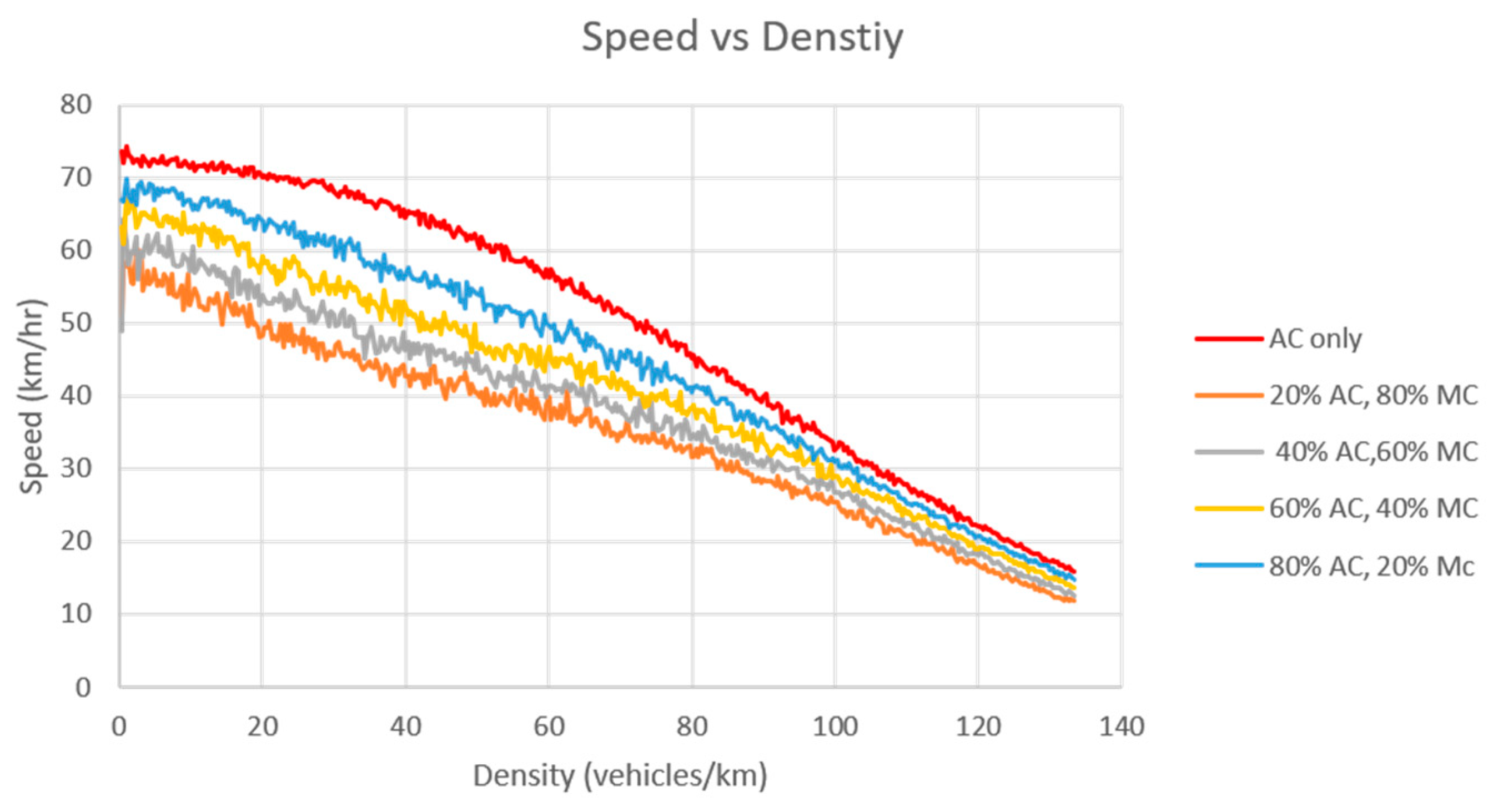
| Scenario 1 | As expected, with the increase in the penetration rate of AC, the flow rate increases significantly. For example, when AC is 20% and MC is 80%, the maximum flow rate is 2707 vehicles/hr, whereas when AC is 80% and MC is 20%, the maximum flow rate is 3400 vehicles//hr, thus increasing the capacity by almost 25.6%. This underscores the importance of AC in a mixed traffic flow which can be extended to a real-world scenario where traffic is composed of different age groups and genders. A key conclusion here is that in the congested phase for the same density, the higher penetration rate of AC can still improve the flow rate in the presence of different characteristics of drivers. This is one of the key benefits of including AC in mixed driver situations, which should be highlighted. Although all manual vehicles are allowed to change lanes aggressively, the rules to change lanes are less stringent, similarly to a real-world scenario. Still, the characteristic of AC to change lanes by following both PLC and ALC behavior can improve the flow rate considerably. This is due to the lower reaction time and headway of autonomous vehicles. |
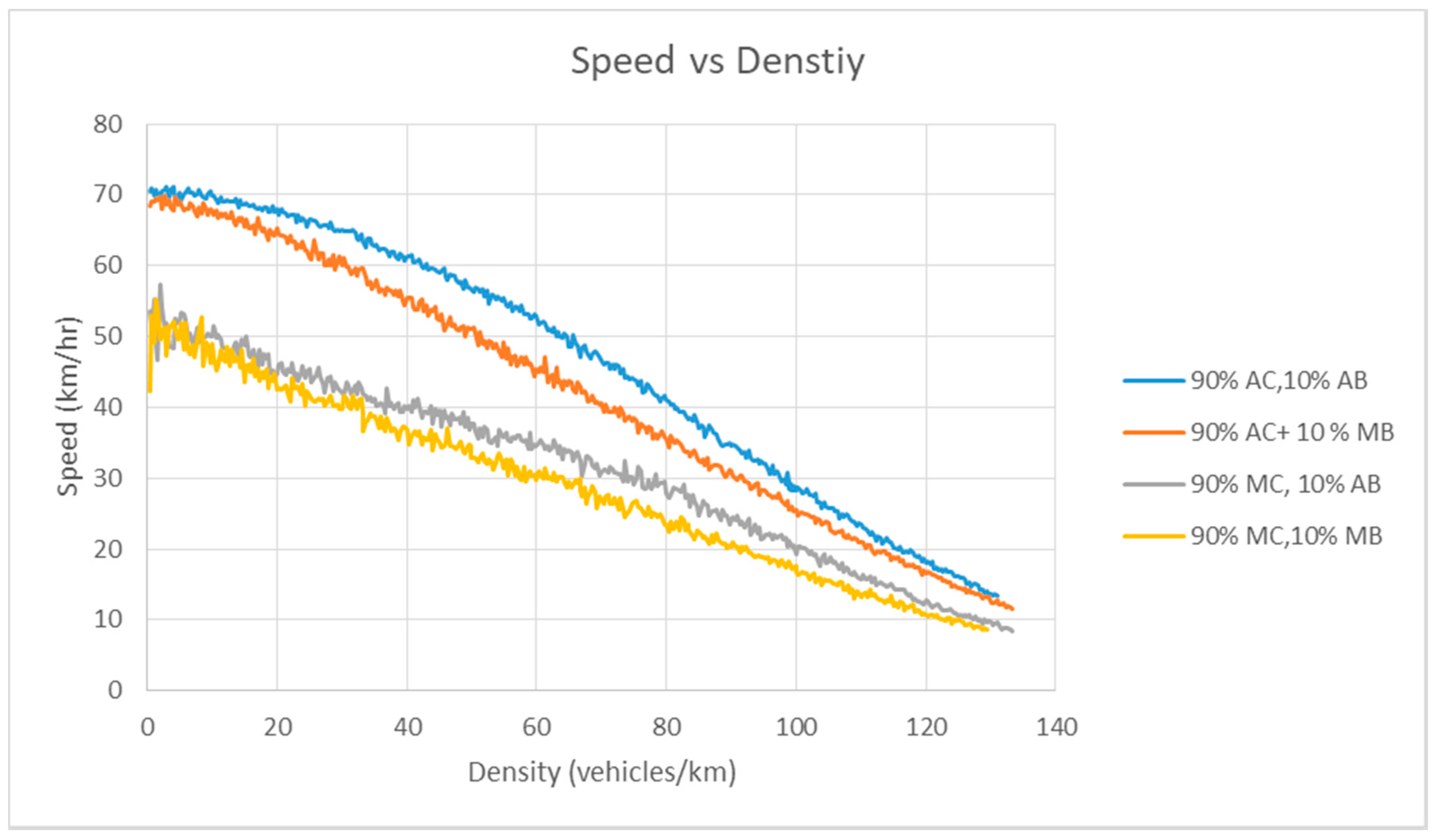
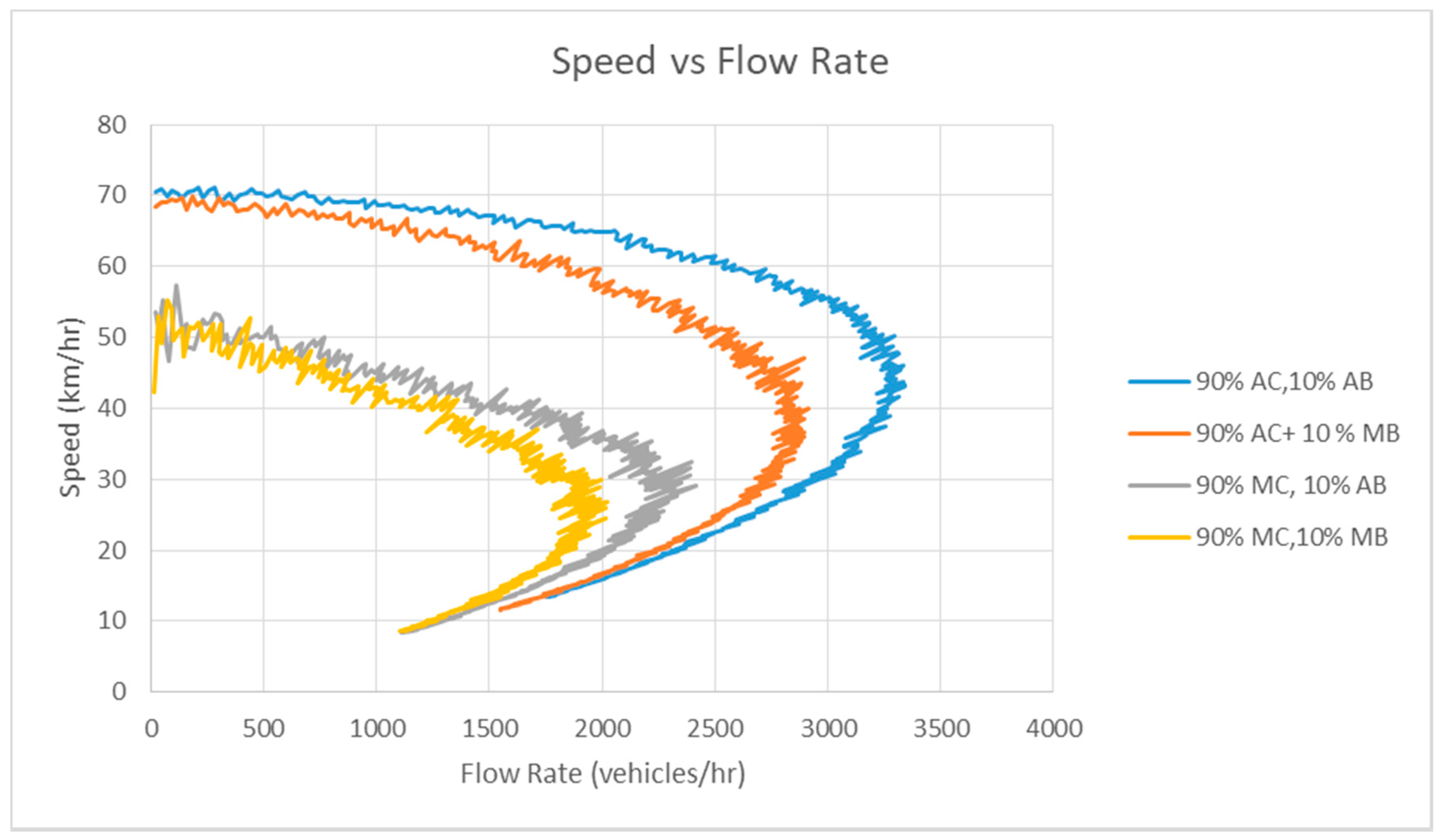
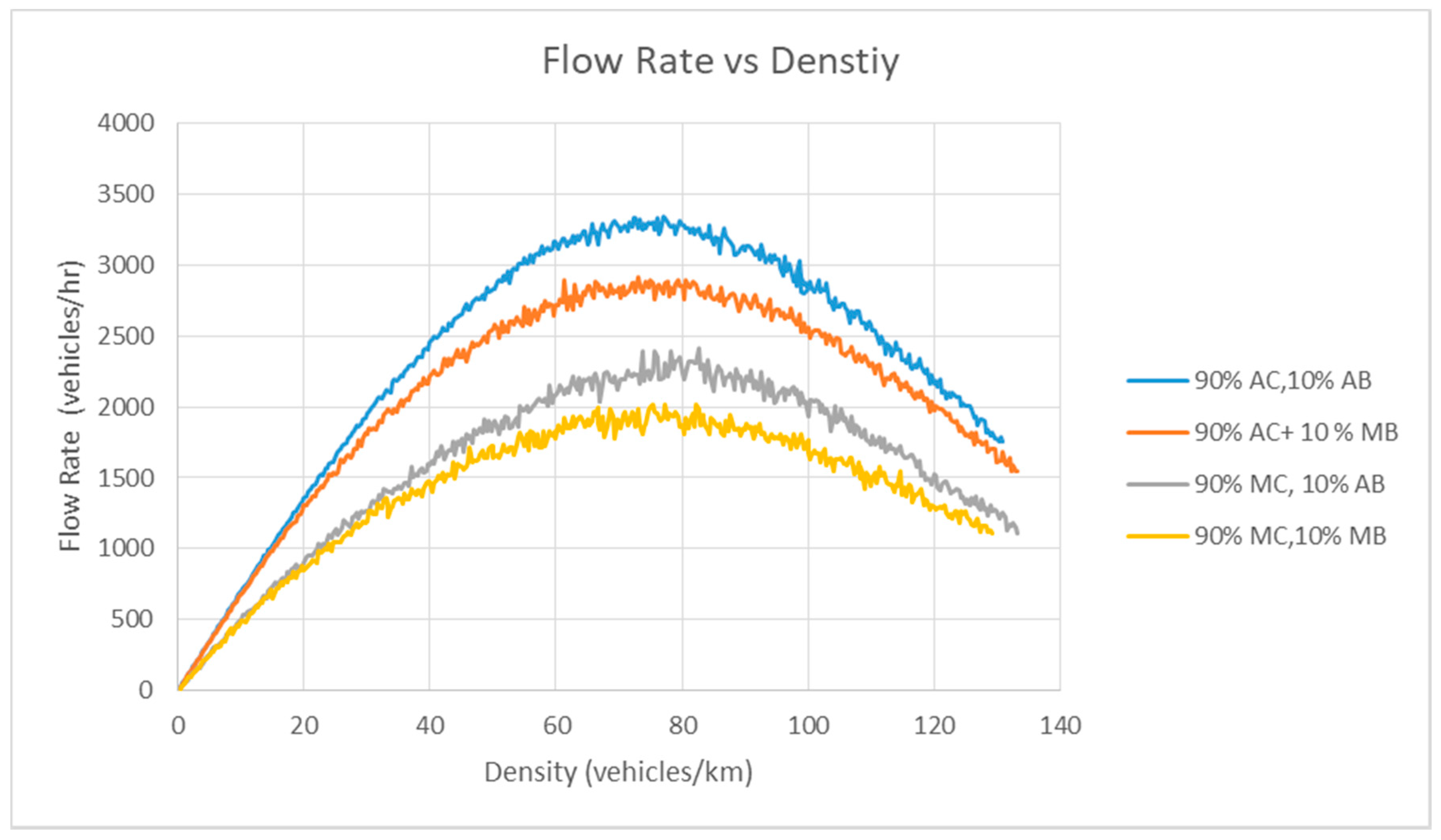
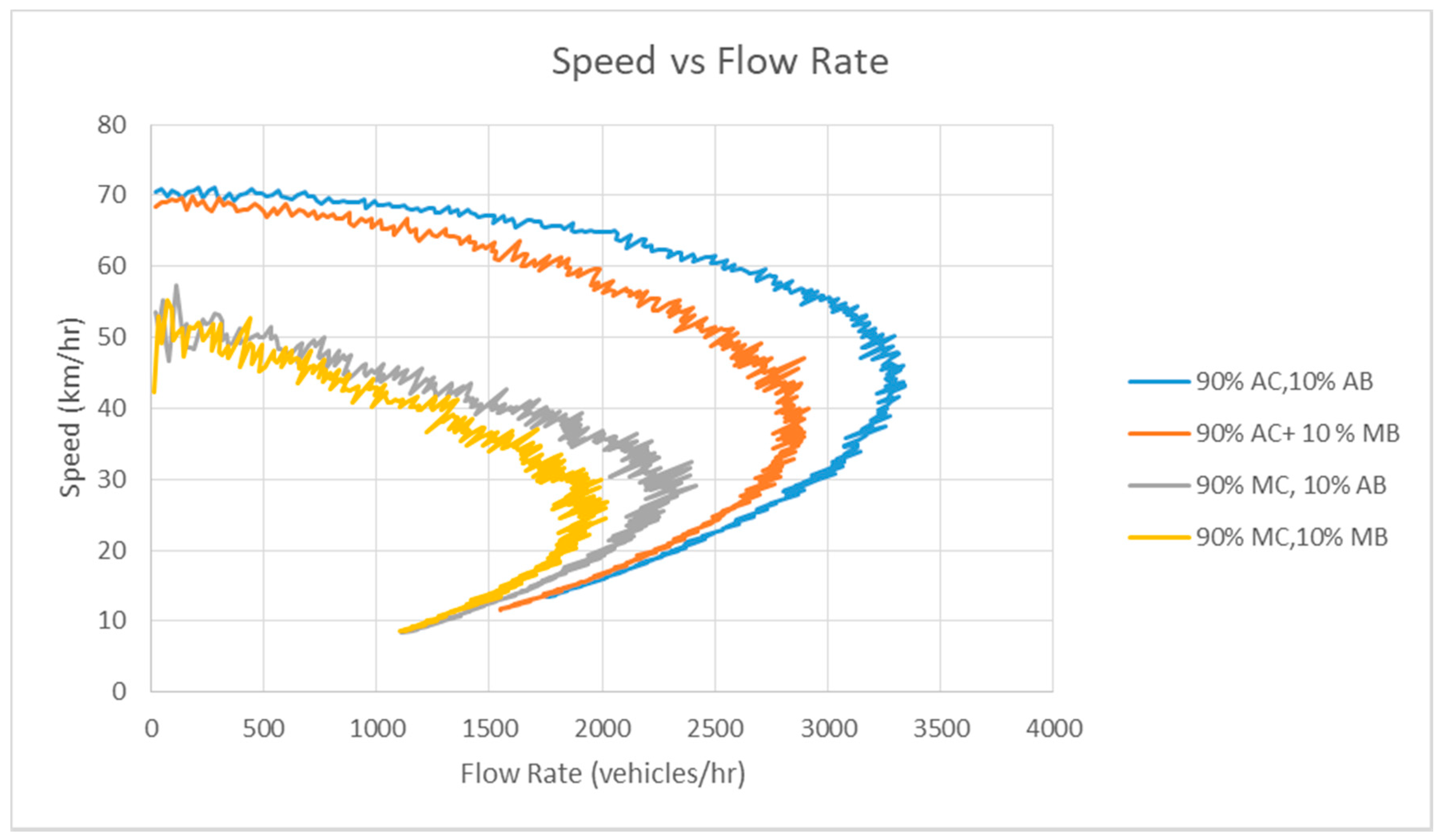
| Scenario 2 | In real-time traffic, buses also have a significant impact on the capacity of the road due to their large size and difficulties in maneuverability. The results of the model clearly indicate the high-end performance of AC, running parallel to AB in terms of capacity. When the MC is 90% and the MB is 10%, the maximum flow rate is 2020 vehicles/hr. In contrast, when the AC is 90% and the AB is 10%, the maximum flow rate is 3342 vehicles/hr, thus increasing the capacity by 65%, which is a high chance. Even when the AC is 90% and the MB is 10%, the maximum flow rate is 2917 vehicles/hr, greater than the manual vehicles simulation. It is generally expected that AC will be used mostly in ridesharing systems. With the additional deployment of AB, more passengers can be attracted to this operating system. This is clearly indicated by the high-end performance of both AC and AB, not only in free flow phase but also, especially, in the congested phase. Even in the case of AB and MC, the mere inclusion of AB instead of MB reduces traffic congestion in the presence of mixed drivers. This observation should be highlighted to indicate the importance of including AB in mixed traffic conditions, especially in dense areas where the number of daily commuters taking the bus is quite high. Furthermore, in the near future, the possibility of including both AC and AB should not be overlooked, as this combination has the potential to reduce traffic congestion considerably. |
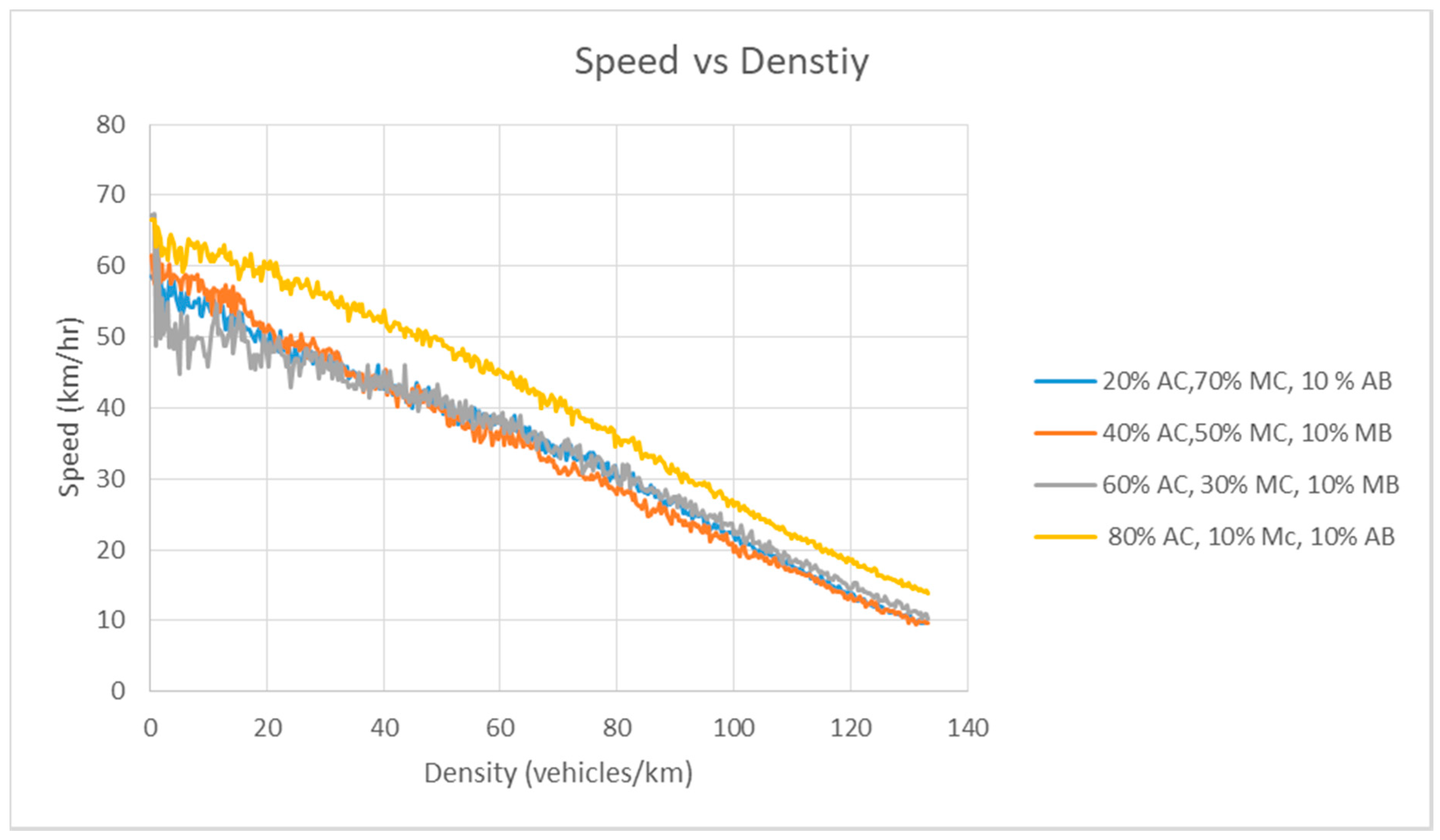
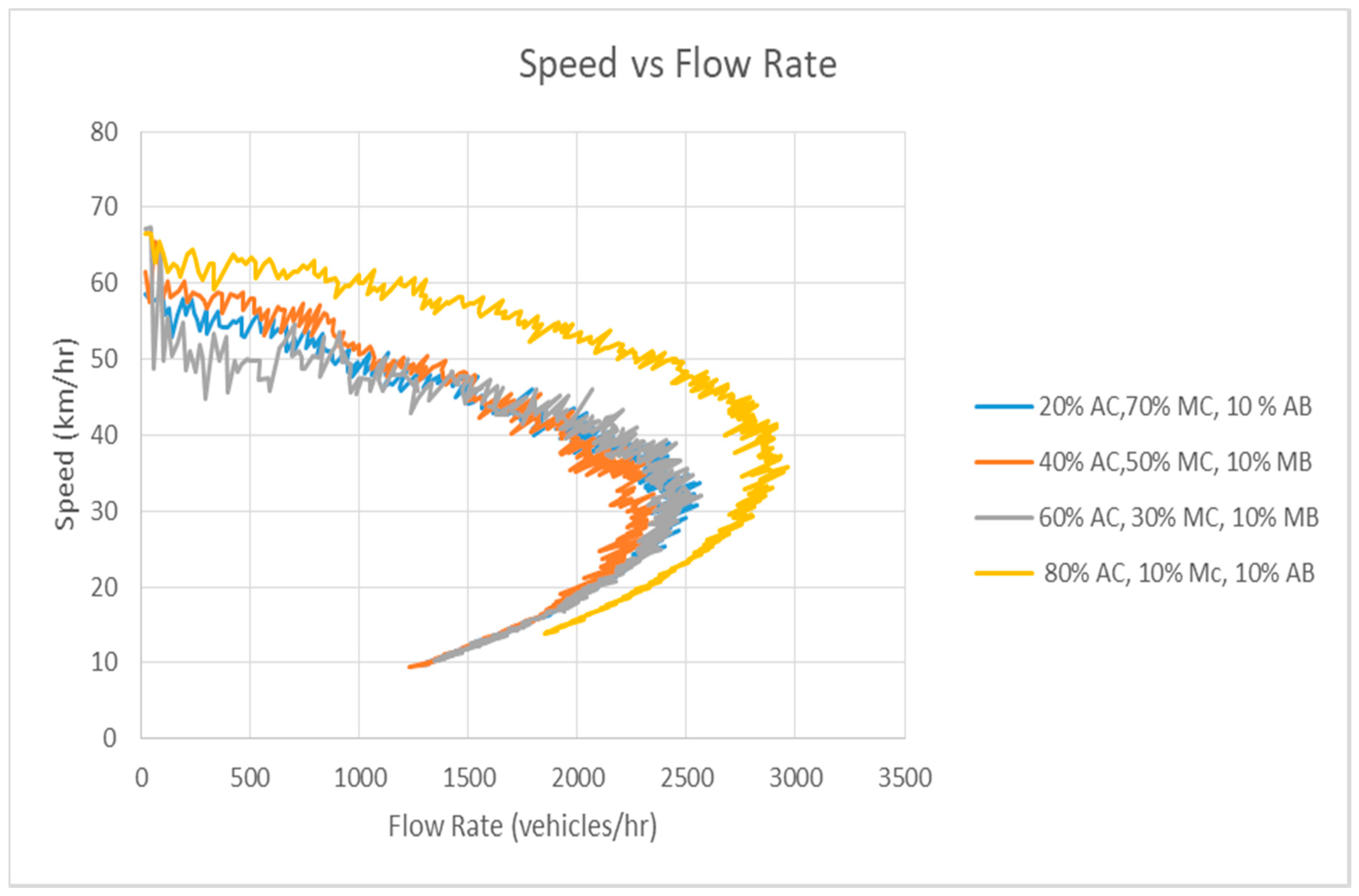
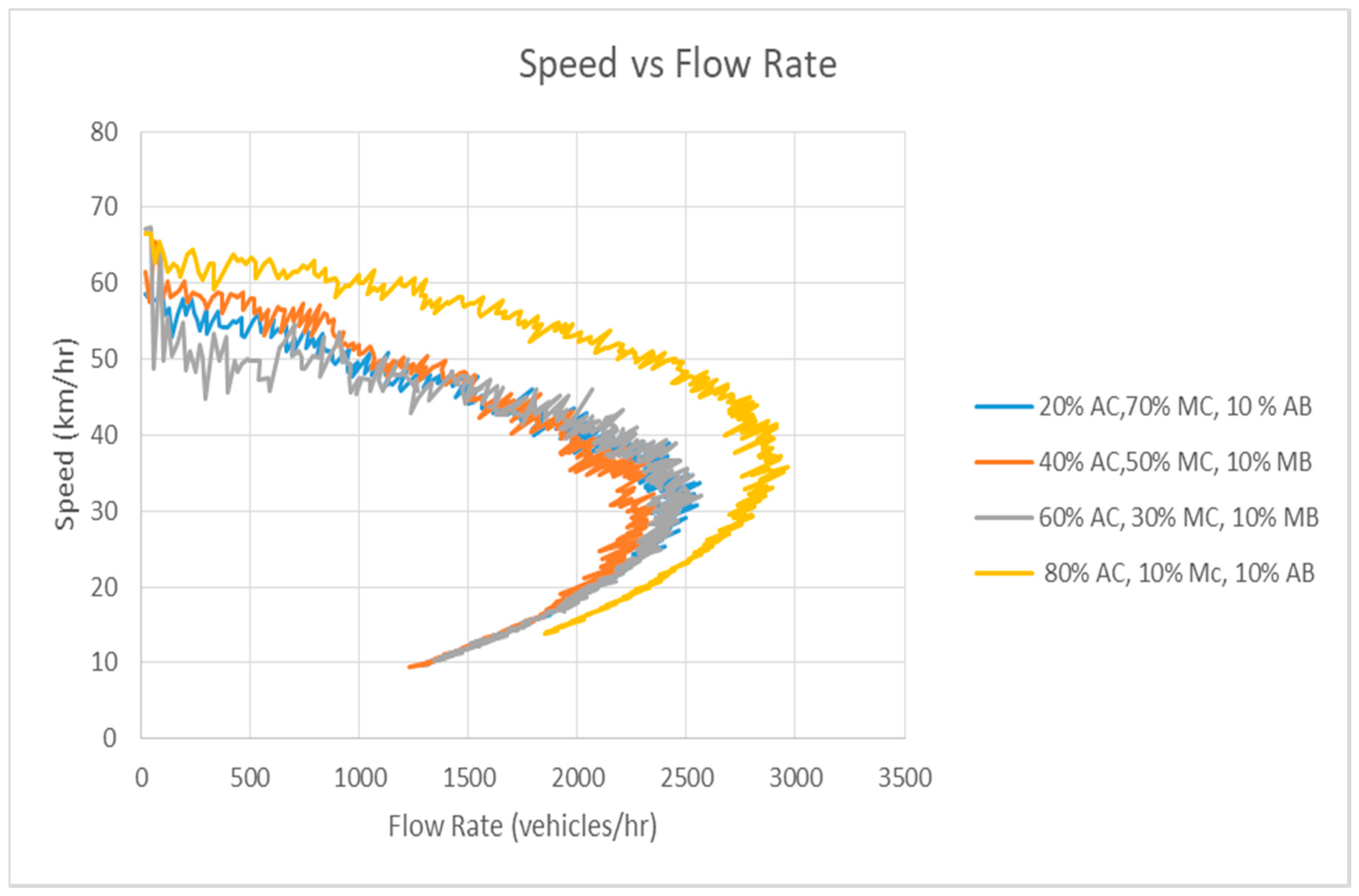
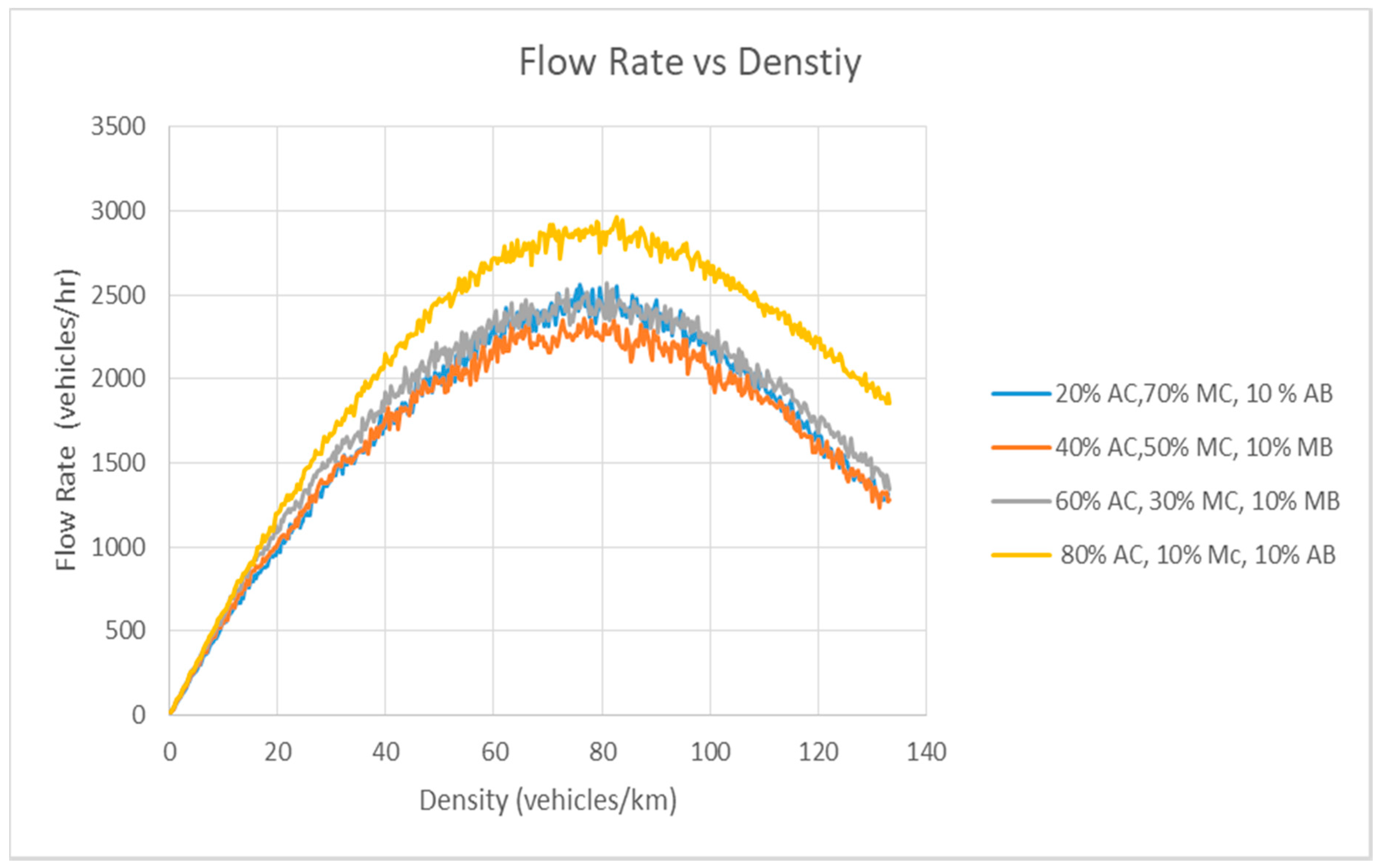
| Scenario 3 | In the near future, it is quite possible that AC and AB will have to run concurrently with MC in different proportions. When AC is 20%, MC 70%, and AB 10% (Simulation 1), the maximum flow rate of the network is 2564 vehicles/hr. In comparison, when AC is 80%, MC 10%, and AB 10% (Simulation 4), the maximum flow rate of the network is 3216 vehicles/h, thus indicating an increase in capacity by 25%. The key thing to note here is the comparison of Simulation 1 to Simulation 2 when AC is 40%, MC 50%, and MB 10%, in comparison to when AC is 60%, MC 30%, and 10%AB (Simulation 3), where the trend of flow rate is slightly different. Although there is some improvement in Simulation 3, it should be noted that merely including AC and AB in random proportions with different manual vehicles will not have a significant impact on the flow rate. The reason for this lies in the lane-changing behavior of manual vehicles, because despite having different driver’s characteristics, manual vehicles can still change lanes aggressively when given the opportunity. Furthermore, if the proportion of manual vehicles is low, as shown in Simulation 4, the potential benefit of both AC and AB in terms of improved flow rate is immense. Thus, key considerations should be taken into account before the deployment of both AC and AB in heterogeneous traffic conditions. |
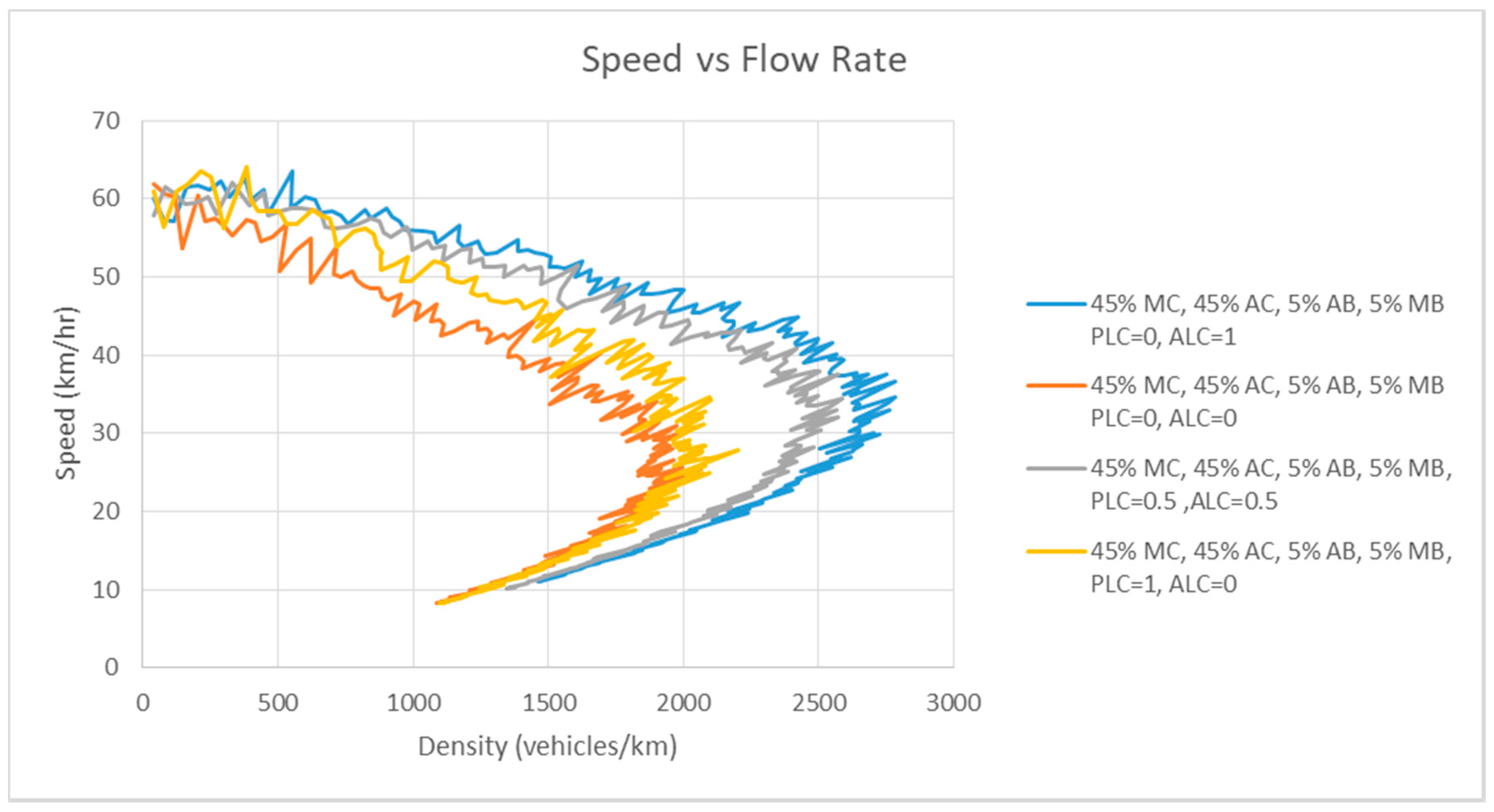
| Scenario 4 | As per expectation, it is apparent from the results that the flow rate is least when PLC and ALC are 0 (Simulation 2), as none of the vehicles are allowed to change lanes. The critical point to note here is that the increase in PLC from 0 to 1 still has no considerable impact on the capacity of the road in comparison to Simulation 2, as for PLC the driver needs to reach at least the minimum safe distance before deciding on whether to change lanes or not. This is done to highlight the significance of PLC, which is also only incorporated in autonomous vehicles, as manual vehicles in this simulation cannot change lanes. Thus, merely including autonomous vehicles under PLC conditions cannot have a considerable impact on the traffic flow rate. Therefore, the benefit of a lower reaction time and headway for autonomous vehicles must be employed positively. When ALC is 1 and PLC is 0, every vehicle is allowed to change lanes. As a result, the traffic flow rate increases considerably due to the less strict rules of ALC. This is done because vehicles do not need to reach a minimum safe distance, as in real-world scenarios. They can switch lanes if they meet the specific criteria of front and back distance, as mentioned in the model part of this paper. Thus, if vehicles are allowed to change lanes under ALC conditions, then the traffic flow rate can be improved significantly. This is another key conclusion which should be highlighted, namely that the lane-changing behavior of autonomous vehicles should also be considered before deployment, as the mere inclusion of autonomous vehicles cannot change the flow rate significantly. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanveer, M.; Kashmiri, F.A.; Naeem, H.; Yan, H.; Qi, X.; Rizvi, S.M.A.; Wang, T.; Lu, H. An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach. Sustainability 2020, 12, 2922. https://doi.org/10.3390/su12072922
Tanveer M, Kashmiri FA, Naeem H, Yan H, Qi X, Rizvi SMA, Wang T, Lu H. An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach. Sustainability. 2020; 12(7):2922. https://doi.org/10.3390/su12072922
Chicago/Turabian StyleTanveer, Muhammad, Faizan Ahmad Kashmiri, Hassan Naeem, Huimin Yan, Xin Qi, Syed Muzammil Abbas Rizvi, Tianshi Wang, and Huapu Lu. 2020. "An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach" Sustainability 12, no. 7: 2922. https://doi.org/10.3390/su12072922
APA StyleTanveer, M., Kashmiri, F. A., Naeem, H., Yan, H., Qi, X., Rizvi, S. M. A., Wang, T., & Lu, H. (2020). An Assessment of Age and Gender Characteristics of Mixed Traffic with Autonomous and Manual Vehicles: A Cellular Automata Approach. Sustainability, 12(7), 2922. https://doi.org/10.3390/su12072922