
An Integrated Bus Holding and Speed Adjusting Strategy Considering Passenger’s Waiting Time Perceptions


Abstract
:1. Introduction
2. Literature Review
2.1. Bus Holding Control
2.2. Speed Adjusting Control
2.3. Transit Passenger Perceptions
2.4. Summary
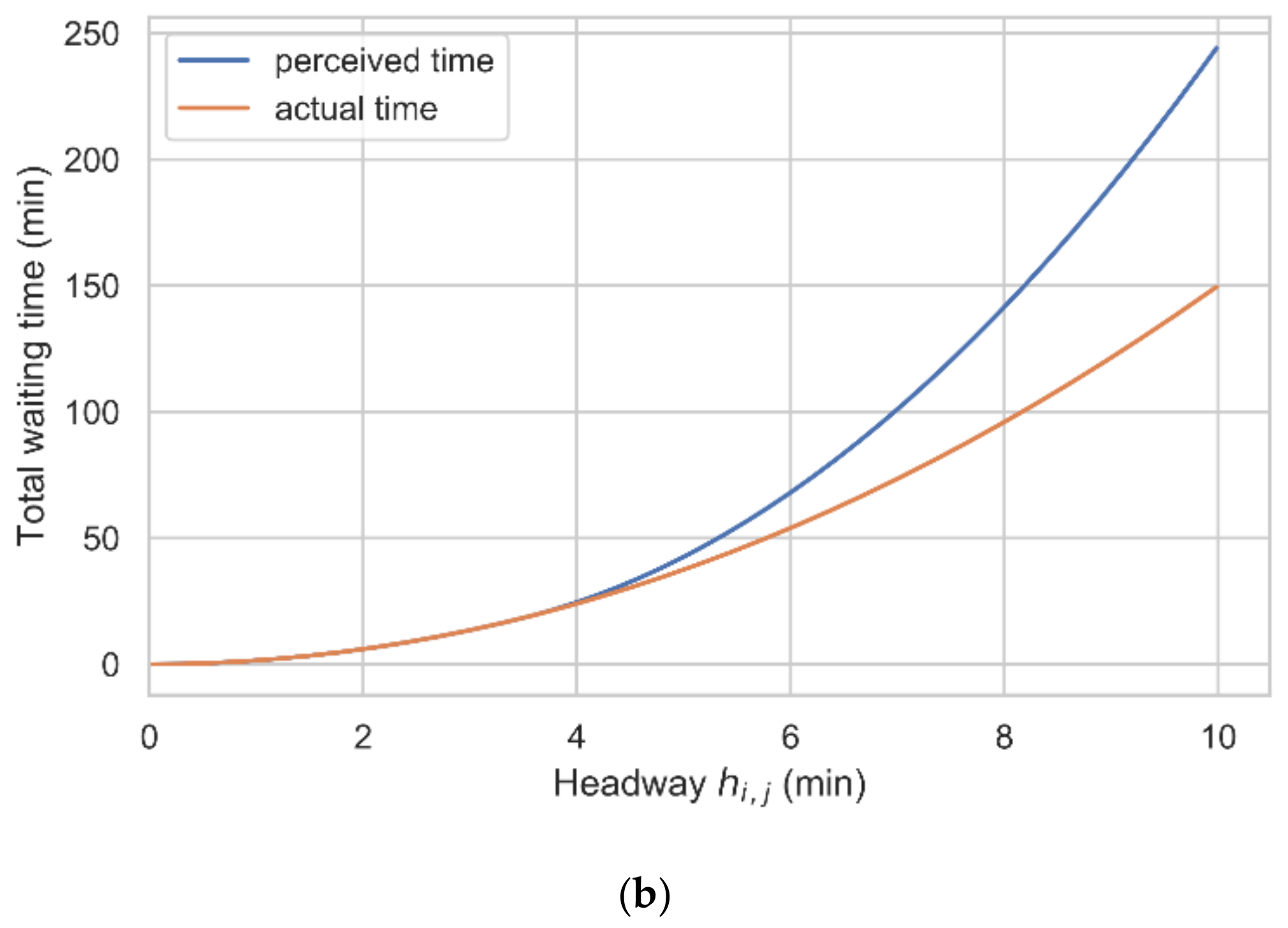
3. Modeling of Passenger’s Perceived Waiting Time
4. Integrated Control Strategy
4.1. Bus Holding
4.2. Speed Adjusting
4.2.1. State Definition
4.2.2. Reward Matrix
4.2.3. Optimal Decision
4.3. Integrated Control
| Step 1: Assign a value to from . Step 2: All buses travel from origin with dispatching interval . When there is a bus arriving at stop : Calculate preceding headway . If : If : Hold bus for seconds after finishing serving passengers. Else if : Hold bus for seconds. Else: Hold bus for seconds. Else: If : Hold bus for seconds after finishing serving passengers. Else if : If optimal policy is executed: Calculate state value and optimal action . Guide bus to travel to stop in seconds. Calculate and renew using the triple . Else: Calculate state value and randomly chosen action from . Guide bus to travel to stop in seconds. Calculate and renew using the triple Else: Hold bus for seconds. End When every bus finishes a trip from origin to terminal: Go to Step 3 Step 3: Output the performance indicators under the present . Step 4: If all elements from have been chosen once: End Else: Assign the null matrix to and a new value to which has never been chosen from . Re-execute Step 2‒Step 4. |
5. Experiment and Analysis
5.1. Simulation Environment and Related Parameters
5.2. Performance Indicators
5.3. Performance Analysis
5.3.1. Influence of Control Strength on Service
5.3.2. Validity of Speed Adjusting Control
5.3.3. Where to Set the Starting SCP
5.3.4. Relationship between SCP and Slack Time
6. Conclusions
- Under the circumstances of threshold-based control and considering passenger’s perceived waiting time, tighter strength of holding control can improve the headway regularity and increase the possibility of buses left behind by their preceding buses though, where buses arrive at stops with a larger headway compared to dispatching interval. This side effect may cause the increase of passenger’s perceived waiting time. It gives bus operators the insight that headway regularity should be thought over cautiously. After all, with other control logic, except threshold-based control, the side effect mentioned may occur as well.
- According to the discussion on speed adjusting control in subchapter 5.3.2, making the bus run fast enough can reduce the in-vehicle delay at several stops and increase the local cruising speed, but it may make buses tend to bunch. It is more conducive to improving service reliability to give reasonable speed guidance for buses when large gaps occur, and this will not significantly reduce the average cruising speed along the whole route.
- The starting SCP should be set near the upstream of the peak of demand and through passengers to reduce both in-vehicle delay and passenger waiting times. When the demand profile of the route has apparent variation, considering only through passengers can also achieve satisfactory performance by adding enough slack time. If the starting SCP is properly set, speed adjusting is able to offset some or even all of the in-vehicle delay caused by holding control, and reduce the system’s need for slack time, which means less need for platform and road space where holding control should be implemented.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Newell, G.F.; Potts, R.B. Maintaining a Bus Schedule. In Proceedings of the 2nd Australian Road Research Board, Melbourne, Australia, 1 January 1964; pp. 388–393. [Google Scholar]
- Daganzo, C.F. A Headway-based Approach to Eliminate Bus Bunching: Systematic Analysis and Comparisons. Transp. Res. Part B Methodol. 2009, 43, 913–921. [Google Scholar] [CrossRef]
- Xuan, Y.; Argote, J.; Daganzo, C.F. Dynamic Bus Holding Strategies for Schedule Reliability: Optimal Linear Control and Performance Analysis. Transp. Res. Part B Methodol. 2011, 45, 1831–1845. [Google Scholar] [CrossRef]
- Fu, L.; Yan, X. Design and Implementation of Bus Holding Control Strategies with Real-time Information. Transp. Res. Rec. 2002, 1791, 6–12. [Google Scholar] [CrossRef] [Green Version]
- Cats, O.; Larijani, A.N.; Koutsopoulos, H.N.; Burghout, W. Impacts of Holding Control Strategies on Transit Performance: Bus Simulation Model Analysis. Transp. Res. Rec. 2011, 2216, 51–58. [Google Scholar] [CrossRef] [Green Version]
- Yin, T.; Zhong, G.; Zhang, J.; Ran, B. A Hybrid Real-time Bus Control Strategy with a Multi-criterion Evaluation. In Proceedings of the 16th COTA International Conference of Transportation Professionals (CICTP 2016), Shanghai, China, 6‒9 July 2016; pp. 681–691. [Google Scholar]
- Huang, Q.; Jia, B.; Qiang, S.; Xiao, Y. Integrated Bus Control Strategy Considering Holding and Limited-boarding. J. Transp. Sys. Eng. Info. Techno. 2018, 18, 103–109. [Google Scholar] [CrossRef]
- Chen, W.; Zhou, K.; Chen, C. Real-time Bus Holding Control on a Transit Corridor Based on Multi-agent Reinforcement Learning. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1‒4 November 2016; pp. 100–106. [Google Scholar]
- Alesiani, F.; Gkiotsalitis, K. Reinforcement Learning-based Bus Holding for High-frequency Services. In Proceedings of the 2018 IEEE 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4‒7 November 2018; pp. 3162–3168. [Google Scholar]
- Bartholdi, J.J., III; Eisenstein, D.D. A Self-coordinating Bus Route to Resist Bus Bunching. Transp. Res. Part B Methodol. 2012, 46, 481–491. [Google Scholar] [CrossRef] [Green Version]
- Liang, S.; Zhao, S.; Lu, C.; Ma, M. A self-adaptive Method to Equalize Headways: Numerical Analysis and Comparison. Transp. Res. Part B Methodol. 2016, 87, 33–43. [Google Scholar] [CrossRef]
- Zhang, S.; Lo, H.K. Two-way-looking Self-equalizing Headway Control for Bus Operations. Transp. Res. Part B Methodol. 2018, 110, 280–301. [Google Scholar] [CrossRef]
- Delgado, F.; Munoz, J.C.; Giesen, R. How Much Can Holding and/or Limiting Boarding Improve Transit Performance. Transp. Res. Part B Methodol. 2012, 46, 1202–1217. [Google Scholar] [CrossRef]
- Sánchez-Martínez, G.E.; Koutsopoulos, H.N.; Wilson, N.H.M. Real-time Holding Control for High-frequency Transit with Dynamics. Transp. Res. Part B Methodol. 2016, 83, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Berrebi, S.J.; Hans, E.; Chiabaut, N. Comparing Bus Holding Methods with and without Real-time Predictions. Transp. Res. Part B Methodol. 2018, 87, 197–211. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Wei, X.; Li, Y.; Zhang, H. An Integrated Bus Holding and Limited-boarding Strategy Considering Passengers’ Perception. J. Transp. Sys. Eng. Info. Techno. 2019, 19, 92–98. [Google Scholar] [CrossRef]
- Wang, J.; Sun, L. Dynamic Holding Control to Avoid Bus Bunching: A Multi-agent Deep Reinforcement Learning Framework. Transp. Res. Part C Emerg. Technol. 2020, 116. [Google Scholar] [CrossRef]
- Daganzo, C.F.; Pilachowski, J. Reducing Bunching with Bus-to-bus Cooperation. Transp. Res. Part B Methodol. 2011, 45, 267–277. [Google Scholar] [CrossRef] [Green Version]
- Teng, J.; Jin, W. A Section-speed Guiding Method for Bus Operation Control. J. Tongji Univ. Nat. Sci. 2015, 43, 1194–1199. [Google Scholar] [CrossRef]
- Yan, H.; Liu, R. Bus Speed Control Strategy and Algorithm Based on Real-time Information. J. Transp. Sys. Eng. Info. Techno. 2018, 18, 61–68. [Google Scholar] [CrossRef]
- He, S. An Anti-bunching Strategy to Improve Bus Schedule and Headway Reliability by Making Use of the Available Accurate Information. Comput. Ind. Eng. 2015, 85, 17–32. [Google Scholar] [CrossRef]
- He, S.; Dong, J.; Liang, S.; Yuan, P. An Approach to Improve the Operational Stability of a Bus Line by Adjusting Bus Speeds on the Dedicated Bus Lanes. Transp. Res. Part C Emerg. Technol. 2019, 107, 54–69. [Google Scholar] [CrossRef]
- Bie, Y.; Xiong, X.; Yan, Y.; Qu, X. Dynamic Headway Control for High-frequency Bus Line Based on Speed Guidance and Intersection Signal Adjustment. Comput. Aided Civil. Infrastruct. Eng. 2020, 35, 4–25. [Google Scholar] [CrossRef]
- Fan, Y.; Guthrie, A.; Levinson, D. Waiting Time Perceptions at Transit Stops and Stations: Effects of Basic Amenities, Gender, and Security. Transp. Res. Part A Policy Pract. 2016, 88, 251–264. [Google Scholar] [CrossRef]
- Trompet, M.; Liu, X.; Graham, D.J. Development of Key Performance Indicator to Compare Regularity of Service between Urban Bus Operators. Transp. Res. Rec. 2011, 2216, 33–41. [Google Scholar] [CrossRef] [Green Version]
- Lv, S.; Tao, L.; Mo, Y. Level of Service Classification and Quantification for Bus Waiting Time on Commuting Trip. J. Transp. Sys. Eng. Info. Techno. 2015, 15, 190–195+221. [Google Scholar] [CrossRef]
- Teng, J.; Wang, H.; Yang, X.; Liu, H.; Liu, X. Subjective Perception Based on Passenger Congestion Quantification for Bus Operation. China J. Highw. Transp. 2018, 31, 299–307. [Google Scholar] [CrossRef]
- Mishalani, R.G.; McCord, M.M.; Wirtz, J. Passenger wait Time Perceptions at Bus Stops: Empirical Results and Impact on Evaluating Real-time Bus Arrival Information. J. Public Transp. 2006, 9, 89–106. [Google Scholar] [CrossRef] [Green Version]
- Herbon, A.; Hadas, Y. Determining Optimal Frequency and Vehicle Capacity for Public Transit Routes: A Generalized Newsvendor Model. Transp. Res. Part B Methodol. 2015, 71, 85–99. [Google Scholar] [CrossRef]
- Klumpenhouwer, W.; Wirasinghe, S.C. Optimal Time Point Configuration of a Bus Route-A Markovian Approach. Transp. Res. Part B Methodol. 2018, 117, 209–227. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Explanation | Notation | Explanation |
|---|---|---|---|
| Total waiting time of passengers boarding bus at stop . (s) | Speed adjusting action set. | ||
| Passenger arrival rate at stop . (pax/min) | Elements in . (s) | ||
| Parameter of waiting expectation. | Policy with maximal reward expectation. (s) | ||
| Parameter of perceived waiting time. | Reward expectation function. | ||
| Dispatching interval. (min) | Probability distribution vector. | ||
| Preceding headway of bus at stop . (min) | Probability transition matrix. | ||
| Arrival time of bus at stop . (min) | Number of simulation days. | ||
| Holding control time of bus at stop (s) | Link travel time from stop to . (s) | ||
| Speed-up control time at stop . (s) | Alighting rate at stop . | ||
| Parameter of holding control strength. | Boarding time per passenger. (s) | ||
| Slack time. (s) | Alighting time per passenger. (s) | ||
| Stop index of SCP (speed-up control point). | Number of passengers boarding bus at stop . (pax) | ||
| State value of bus at stop . | Number of boarding passengers affected by operation control in a day. (pax) | ||
| Median of state in which is. | Load of bus leaving stop . (pax) | ||
| Utility function. | Number of riders affected by operation control in a day. (pax) | ||
| Number of discrete states. | Weighted waiting time at stops. (s) | ||
| State step. (s) | Weighted in-vehicle delay. (s) | ||
| Reward matrix. | Total travel cost. (s) |
| Parameter | Value/Characteristic | Explanation |
|---|---|---|
| 50 days | Simulation days. Stochastic policy will be implemented for days. | |
| Mean: 1.7 min STD: 0.3 min | Travel time of link between stop and . Conforms to lognormal distribution. | |
| Mean: 1.7 min STD: 0.1 min | Travel time of link between stop and . Conforms to lognormal distribution. | |
| 𝐻 | 5 min | Dispatching interval. |
| , , , | Alighting rate of passengers from vehicle at stop . | |
| 4 s/pax | Boarding time per passenger. | |
| 2 s/pax | Alighting time per passenger. | |
| 0.7 | Parameter of waiting expectation. | |
| 1.5 | Parameter of perceived waiting time. | |
| See Figure 5. | Passenger arrival rate at stop . | |
| 11 | Number of discrete states. | |
| 6 s | State step. | |
| Action set of speed adjusting. must be under road speed limit. |
| 0.2 | 1282 | −63 | 1219 | 97.2 | 6947 | 371.5 | 75.5 |
| 0.3 | 1227 | −60 | 1167 | 91.3 | 6921 | 369.2 | 69.8 |
| 0.4 | 1231 | −44 | 1187 | 83.1 | 6879 | 362.7 | 61.4 |
| 0.5 | 1161 | −28 | 1133 | 82.2 | 6830 | 363.7 | 66.8 |
| 0.6 | 1113 | −14 | 1099 | 73.5 | 6685 | 359.3 | 58.9 |
| 0.7 | 1085 | 23 | 1108 | 63.7 | 6875 | 351.4 | 52.1 |
| 0.8 | 1064 | 57 | 1121 | 54.5 | 7277 | 344.8 | 44.2 |
| 0.9 | 1049 | 100 | 1149 | 47.4 | 7810 | 339.8 | 40.3 |
| 1.0 | 1059 | 127 | 1186 | 45.7 | 8149 | 338.4 | 40.5 |
| Demand Profile | Starting SCP | ||||
|---|---|---|---|---|---|
| AL | − | 0.6 | 751 | 48 | 799 |
| 6 | 0.5 | 644 | −23 | 621 | |
| 12 | 0.5 | 660 | −28 | 632 | |
| 18 | 0.7 | 661 | 1 | 662 | |
| AH | − | 0.8 | 2866 | 387 | 3253 |
| 6 | 0.7 | 1728 | 63 | 1791 | |
| 12 | 0.8 | 1932 | 159 | 2091 | |
| 18 | 0.9 | 2981 | 266 | 3247 | |
| UM | − | 0.7 | 1345 | 153 | 1498 |
| 5 | 0.5 | 1147 | 19 | 1166 | |
| 8 | 0.5 | 1161 | −28 | 1133 | |
| 10 | 0.7 | 1138 | −3 | 1135 | |
| 14 | 0.7 | 1243 | −15 | 1228 | |
| BM | − | 0.7 | 1535 | 174 | 1709 |
| 6 | 0.6 | 1271 | −13 | 1258 | |
| 8 | 0.7 | 1248 | 15 | 1263 | |
| 12 | 0.6 | 1315 | 28 | 1343 | |
| 15 | 0.7 | 1321 | 7 | 1328 |
| 0 | 1530 | 104 | 1634 | − | − | − | 107.39 | − | 13.91 | − | |
| −10 | 1390 | 53 | 1443 | 1620 | −86 | 1534 | 98.83 | 82.08 | 14.24 | 14.06 | |
| −20 | 1281 | 10 | 1291 | 1505 | −227 | 1278 | 91.26 | 70.34 | 14.47 | 14.75 | |
| −30 | 1217 | −33 | 1184 | 1432 | −335 | 1097 | 85.37 | 63.72 | 14.65 | 15.33 | |
| 1134 | −32 | 1102 | 1348 | −292 | 1056 | 75.80 | 53.55 | 14.71 | 15.06 |
| Experiment Index | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| (s) | 4 | 5 | 6 | 7 | 9 | 11 |
| 15 | 13 | 11 | 11 | 7 | 7 |
| 0 | 5 | 10 | 15 | 20 | ||
|---|---|---|---|---|---|---|
| 0.4 | 1128/−9.3% | 1043/−5.5% | 988/−6.3% | 936/+11.6% | 934/+25.7% | |
| 0.8 | 989/−9.1% | 961/−1.8% | 926/+16.6% | 911/+19.4% | 921/+30.2% | |
| 1.2 | 960/+6.3% | 918/+3.0% | 932/+4.3% | 911/+21.7% | 900/+28.5% | |
| 1.6 | 950/+9.1% | 921/+13.6% | 915/+22.4% | 926/+33.5% | 928/+39.8% | |
| 2 | 935/+10.6% | 941/+8.3% | 913/+25.4% | 898/+16.9% | 889/+24.4% | |
 : insufficient control;
: insufficient control;  : proper control;
: proper control;  : excessive control. The elements in this table are and .
: excessive control. The elements in this table are and .| Demand Profile | Starting SCP | ||||||
|---|---|---|---|---|---|---|---|
| AL | − | 0.6 | 10 | 607 | 88 | 695 | 13% |
| 6 | 0.5 | 7 | 587 | 15 | 602 | 3% | |
| 12 | 0.5 | 7 | 589 | 5 | 594 | 6% | |
| 18 | 0.7 | 15 | 563 | 101 | 664 | 0% | |
| AH | − | 0.8 | 18 | 1424 | 467 | 1891 | 42% |
| 6 | 0.7 | 13 | 1339 | 188 | 1527 | 15% | |
| 12 | 0.8 | 13 | 1404 | 228 | 1632 | 22% | |
| 18 | 0.9 | 17 | 1405 | 338 | 1743 | 46% | |
| UM | − | 0.7 | 15 | 1023 | 257 | 1280 | 15% |
| 5 | 0.5 | 10 | 998 | 103 | 1101 | 6% | |
| 8 | 0.5 | 12 | 979 | 86 | 1065 | 6% | |
| 10 | 0.7 | 10 | 999 | 71 | 1070 | 6% | |
| 14 | 0.7 | 10 | 1029 | 69 | 1098 | 11% | |
| BM | − | 0.7 | 10 | 1168 | 202 | 1370 | 20% |
| 6 | 0.6 | 12 | 1060 | 105 | 1165 | 7% | |
| 8 | 0.7 | 10 | 1085 | 99 | 1184 | 6% | |
| 12 | 0.6 | 12 | 1099 | 122 | 1221 | 9% | |
| 15 | 0.7 | 8 | 1115 | 74 | 1189 | 10% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Zhang, H.; Chen, C.; Wei, X. An Integrated Bus Holding and Speed Adjusting Strategy Considering Passenger’s Waiting Time Perceptions. Sustainability 2021, 13, 5529. https://doi.org/10.3390/su13105529
Chen W, Zhang H, Chen C, Wei X. An Integrated Bus Holding and Speed Adjusting Strategy Considering Passenger’s Waiting Time Perceptions. Sustainability. 2021; 13(10):5529. https://doi.org/10.3390/su13105529
Chicago/Turabian StyleChen, Weiya, Hengpeng Zhang, Chunxiao Chen, and Xiaofan Wei. 2021. "An Integrated Bus Holding and Speed Adjusting Strategy Considering Passenger’s Waiting Time Perceptions" Sustainability 13, no. 10: 5529. https://doi.org/10.3390/su13105529