
A Holistic Multi-Objective Design Optimization Approach for Arctic Offshore Supply Vessels





Abstract
:1. Introduction
- RQ 1: Is it feasible to apply the ABC algorithm for holistic multi-objective optimization of an Arctic vessel?
- RQ 2: How does the consideration of icebreaker assistance affect the optimization of an Arctic OSV?
- RQ 3: How does the assumed speed profile of an Arctic OSV affect the outcome of the vessel optimization process?
- RQ 4: How do variations in the cargo capacity parameters (deadweight or cargo deck area), discount rate, or operation period affect the optimization results?
2. Materials and Methods
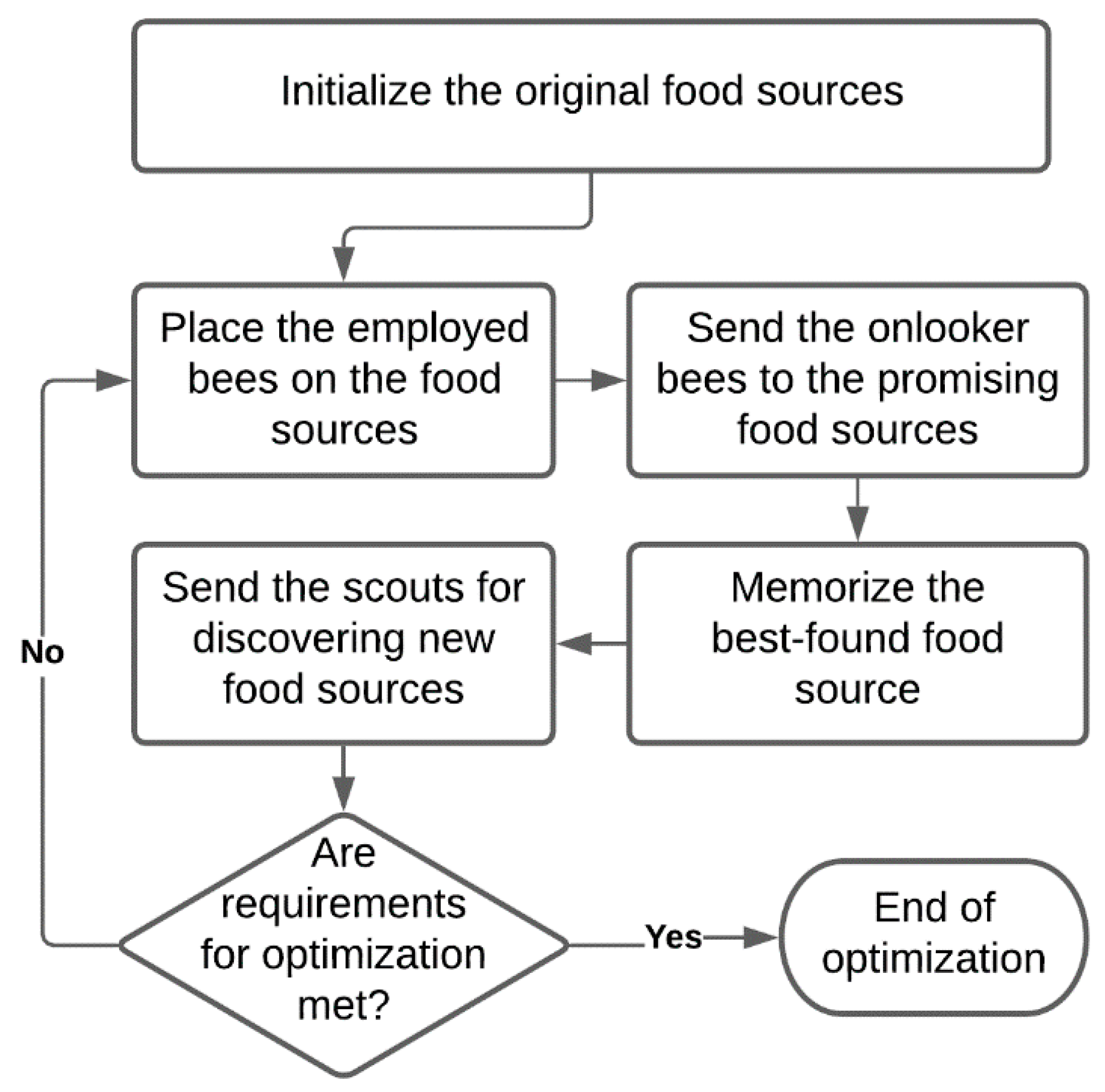
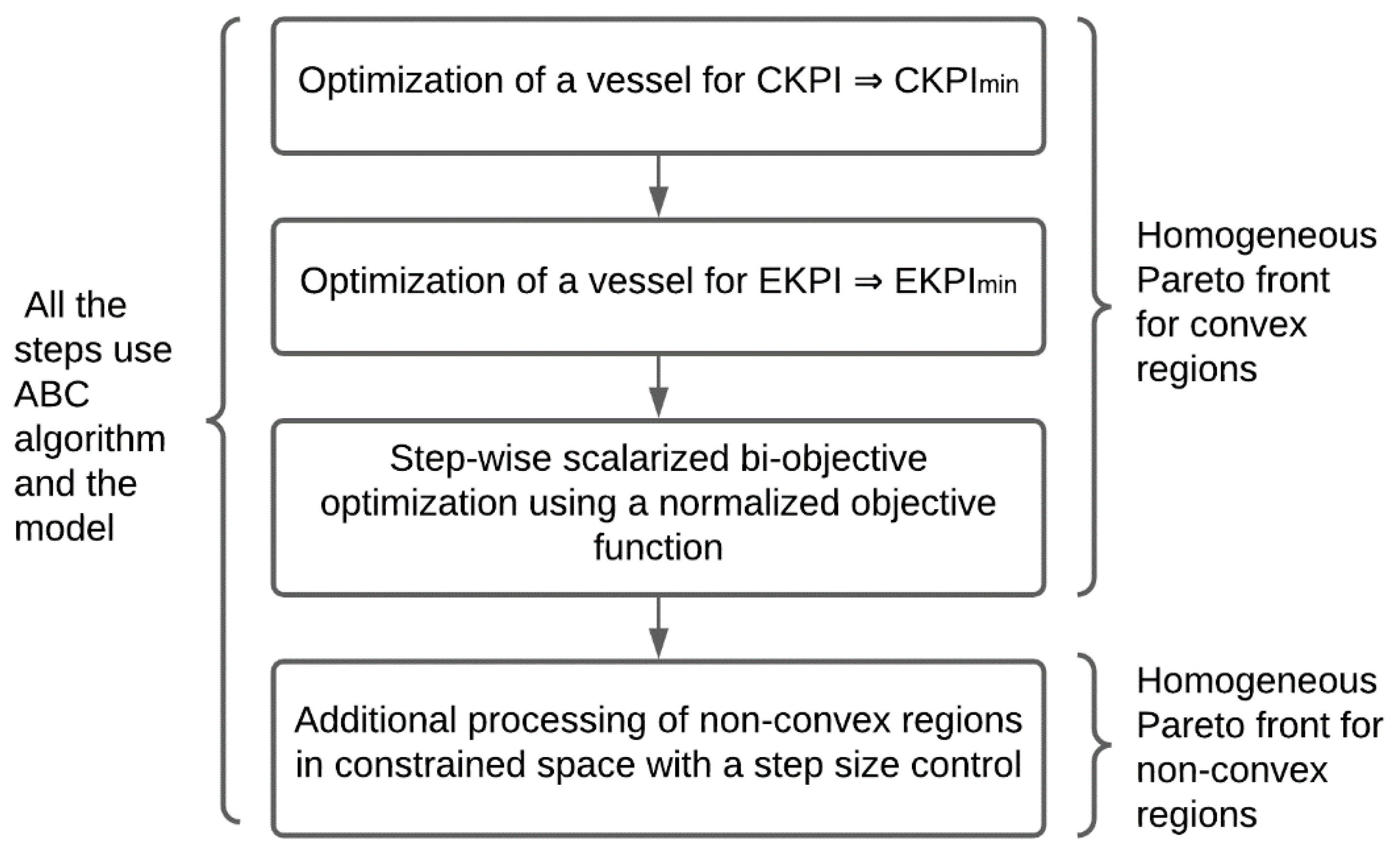
2.1. Optimization Process
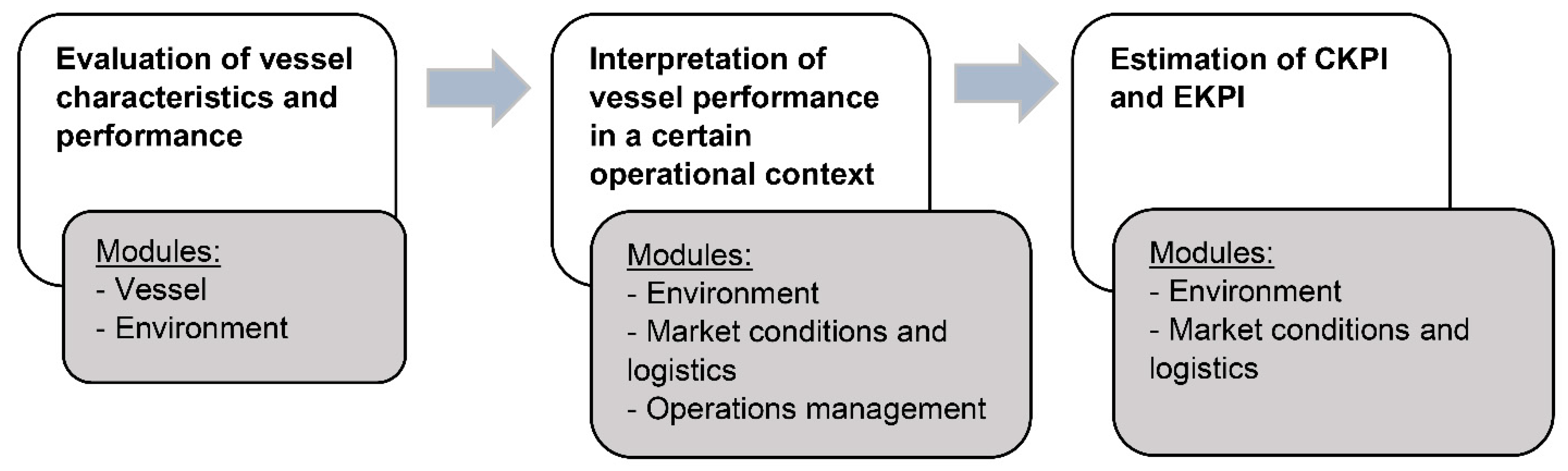
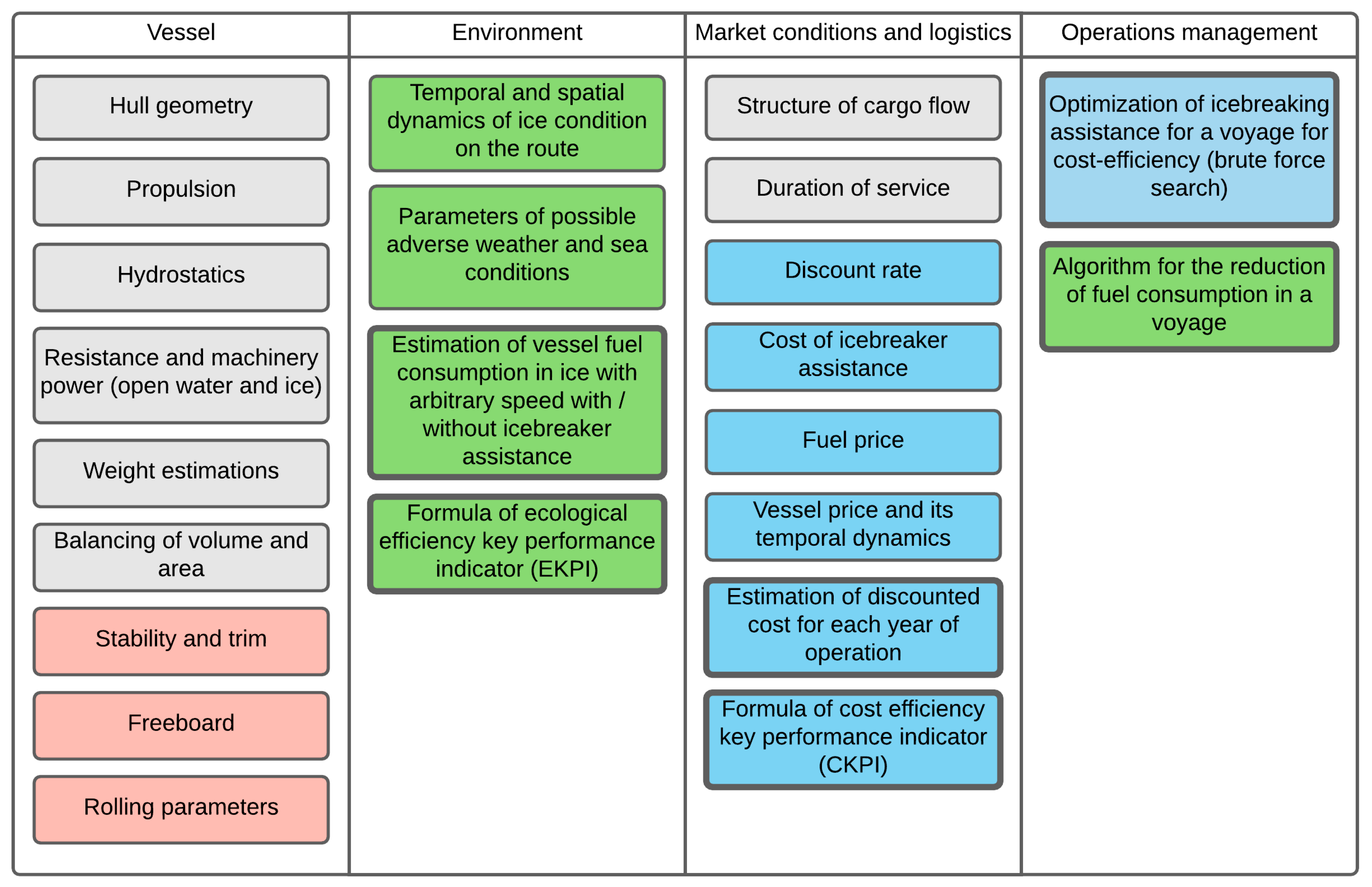
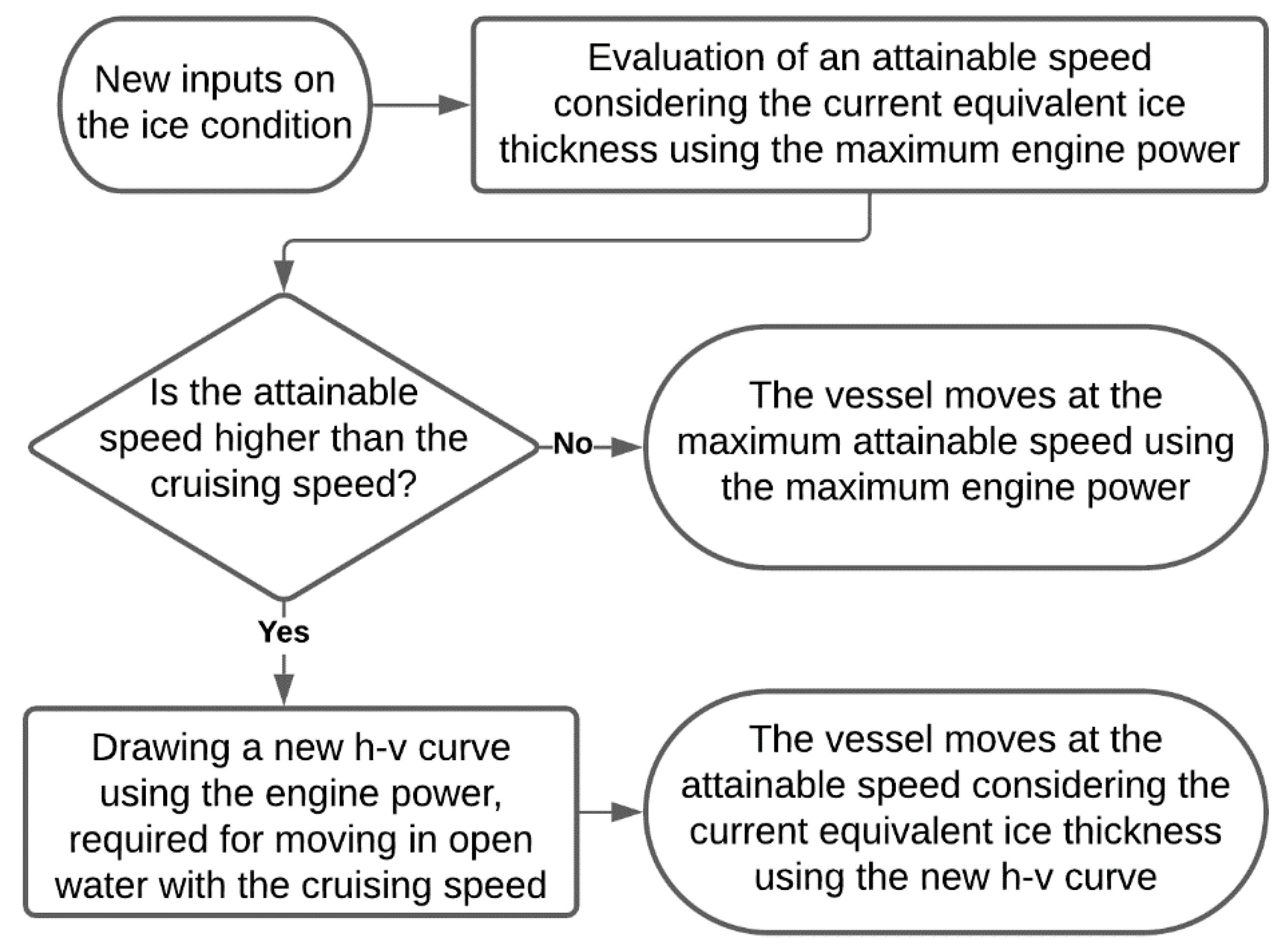
2.2. Vessel Evaluation Model
3. Results
3.1. Case Study Inputs
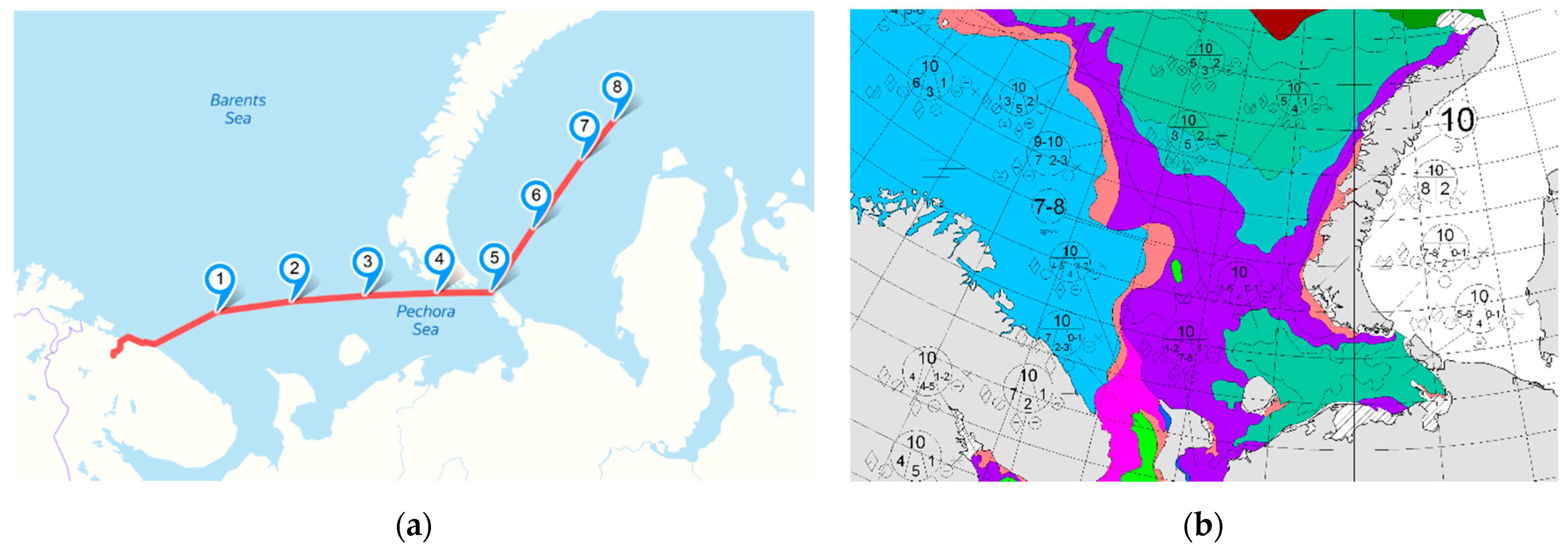
3.1.1. Ice Condition
3.1.2. Description of the Study Cases
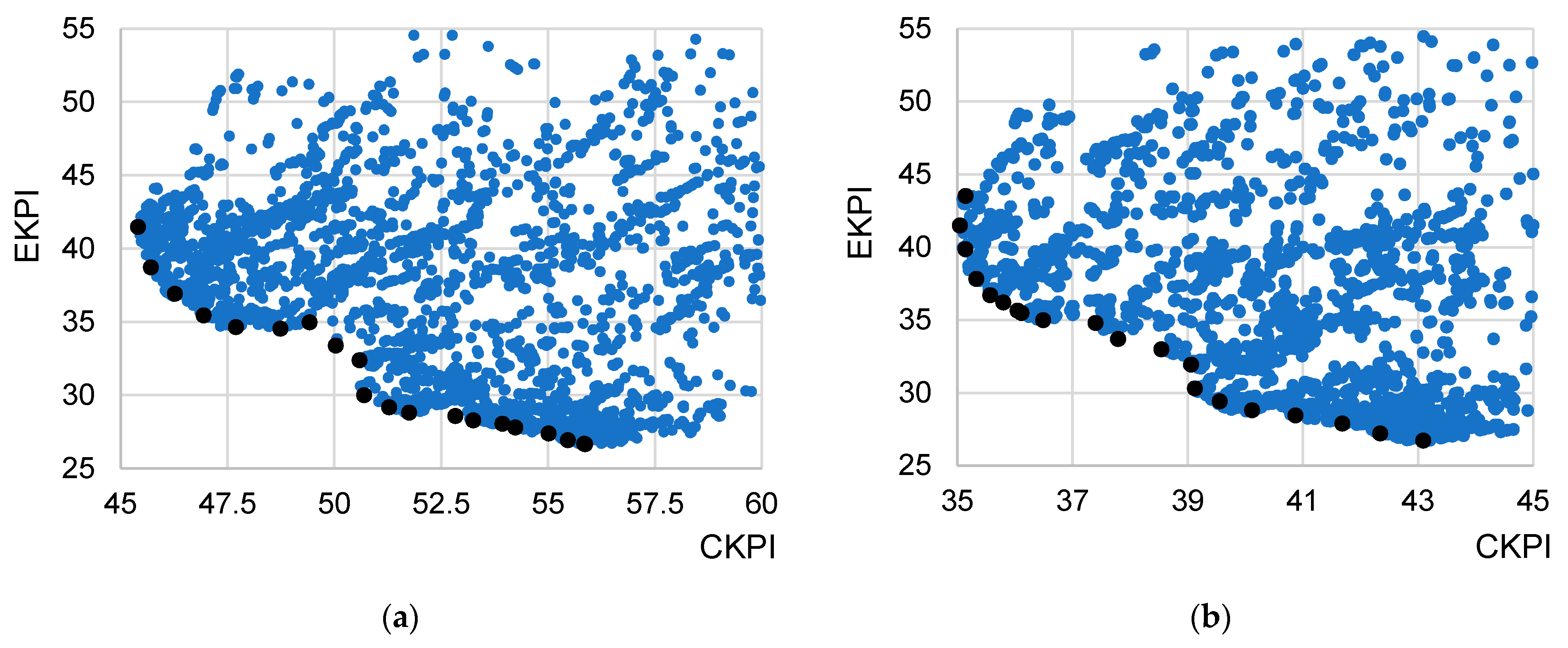
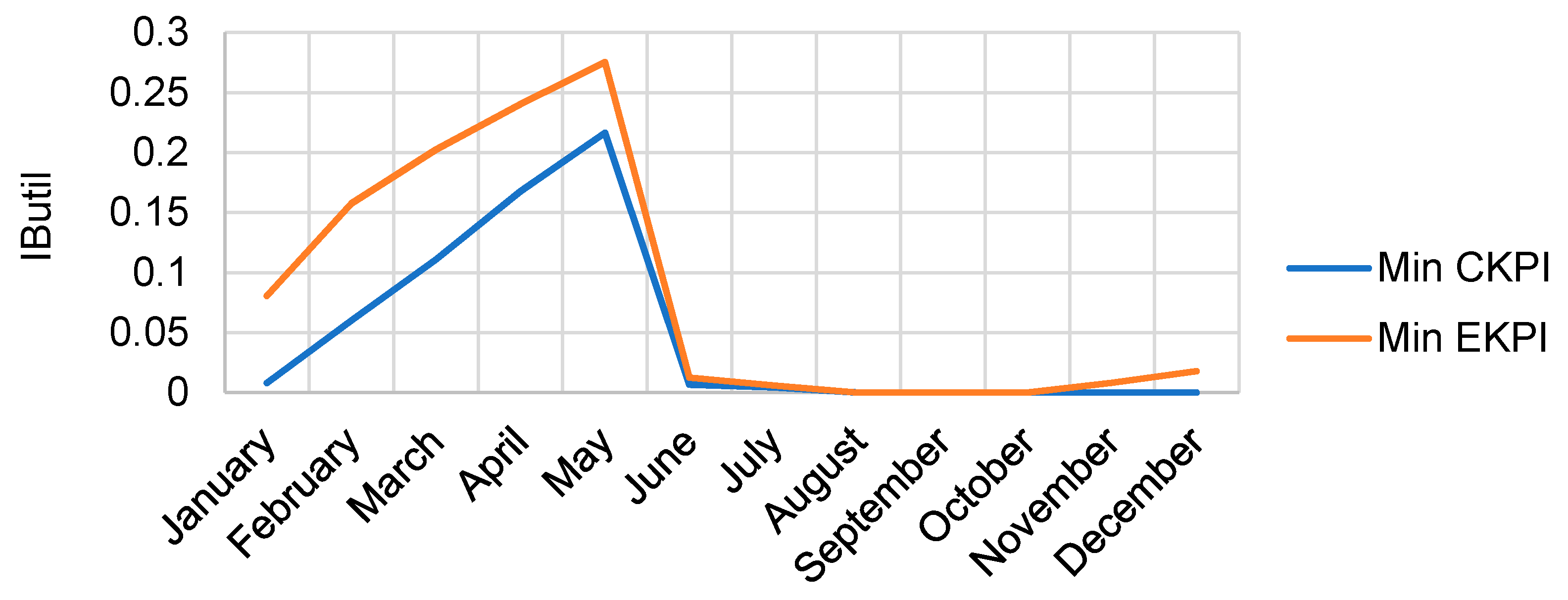
3.2. Case Study Outcomes
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lwl, m | B, m | T, m | H, m | Cbwl | ∆, t | Vs, kn | Arc | hice, m | CKPI | EKPI | IButil | Dw, t | Sdeck, m2 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case 1: | |||||||||||||
| 110.8 | 18.4 | 6.8 | 8.2 | 0.635 | 9041 | 13.5 | 5 | 0.83 | 45.4 | 41.5 | 0.034 | 4756 | 851 |
| 110.4 | 18.4 | 7.5 | 9.0 | 0.635 | 9885 | 13.0 | 5 | 0.84 | 45.7 | 38.7 | 0.036 | 5233 | 847 |
| 110.8 | 18.5 | 7.9 | 9.5 | 0.635 | 10,541 | 12.5 | 5 | 0.83 | 46.3 | 36.9 | 0.037 | 5587 | 856 |
| 110.7 | 18.4 | 8.5 | 10.2 | 0.635 | 11,232 | 12.0 | 5 | 0.83 | 46.9 | 35.5 | 0.038 | 5967 | 850 |
| 110.8 | 18.5 | 8.9 | 10.9 | 0.635 | 11,940 | 12.0 | 5 | 0.84 | 47.7 | 34.7 | 0.039 | 6337 | 855 |
| 110.8 | 21.9 | 8.4 | 10.2 | 0.635 | 13,266 | 12.5 | 5 | 0.88 | 48.7 | 34.5 | 0.039 | 7054 | 1104 |
| 109.9 | 20.8 | 8.7 | 10.6 | 0.629 | 12,843 | 12.0 | 5 | 0.87 | 49.4 | 35.0 | 0.040 | 6762 | 1039 |
| 110.1 | 22.1 | 9.0 | 10.9 | 0.634 | 14,228 | 12.0 | 5 | 0.86 | 50.0 | 33.4 | 0.041 | 7559 | 1107 |
| 110.3 | 18.3 | 7.6 | 9.2 | 0.631 | 9891 | 12.0 | 5 | 0.77 | 50.6 | 32.4 | 0.058 | 5190 | 842 |
| 110.8 | 18.5 | 8.3 | 10.1 | 0.635 | 11,137 | 12.0 | 5 | 0.77 | 50.7 | 30.0 | 0.060 | 5913 | 854 |
| 110.8 | 18.5 | 8.9 | 10.8 | 0.635 | 11,822 | 12.0 | 5 | 0.77 | 51.3 | 29.2 | 0.062 | 6283 | 852 |
| 110.9 | 18.5 | 9.0 | 10.9 | 0.635 | 12,002 | 11.5 | 5 | 0.76 | 51.7 | 28.8 | 0.063 | 6378 | 854 |
| 110.3 | 21.0 | 8.8 | 10.7 | 0.635 | 13,330 | 11.5 | 5 | 0.77 | 52.8 | 28.6 | 0.065 | 7126 | 1050 |
| 110.5 | 21.6 | 9.0 | 10.9 | 0.635 | 13,959 | 12.0 | 5 | 0.77 | 53.2 | 28.3 | 0.065 | 7456 | 1082 |
| 110.8 | 22.5 | 8.9 | 10.8 | 0.635 | 14,464 | 12.0 | 5 | 0.76 | 53.9 | 28.1 | 0.066 | 7707 | 1135 |
| 110.6 | 22.5 | 9.0 | 10.9 | 0.635 | 14,561 | 11.5 | 5 | 0.76 | 54.2 | 27.8 | 0.067 | 7763 | 1130 |
| 110.8 | 24.8 | 8.5 | 10.4 | 0.635 | 15,295 | 10.9 | 5 | 0.76 | 55.0 | 27.4 | 0.070 | 8184 | 1349 |
| 110.8 | 24.7 | 9.0 | 10.9 | 0.635 | 16,010 | 11.5 | 5 | 0.76 | 55.5 | 26.9 | 0.070 | 8555 | 1342 |
| 110.8 | 25.0 | 9.0 | 10.9 | 0.635 | 16,162 | 11.0 | 5 | 0.77 | 55.8 | 26.7 | 0.071 | 8638 | 1358 |
| 110.8 | 25.0 | 9.0 | 10.9 | 0.635 | 16,189 | 11.0 | 5 | 0.77 | 55.9 | 26.7 | 0.071 | 8653 | 1360 |
| Case 2: | |||||||||||||
| 110.2 | 18.5 | 6.9 | 8.3 | 0.635 | 9152 | 13.5 | 5 | 0.83 | 35.0 | 41.5 | 0.034 | 4820 | 851 |
| 110.8 | 18.4 | 7.0 | 8.4 | 0.635 | 9352 | 12.5 | 5 | 0.85 | 35.1 | 39.9 | 0.035 | 4928 | 852 |
| 110.5 | 18.5 | 6.5 | 7.7 | 0.635 | 8576 | 13.5 | 5 | 0.83 | 35.1 | 43.5 | 0.034 | 4484 | 851 |
| 110.4 | 18.4 | 7.6 | 9.2 | 0.635 | 10,071 | 12.5 | 5 | 0.83 | 35.3 | 37.8 | 0.036 | 5333 | 845 |
| 110.8 | 18.5 | 8.0 | 9.6 | 0.635 | 10,597 | 12.5 | 5 | 0.84 | 35.6 | 36.7 | 0.037 | 5619 | 852 |
| 110.7 | 18.4 | 8.2 | 10.0 | 0.635 | 10,935 | 12.5 | 5 | 0.83 | 35.8 | 36.2 | 0.037 | 5806 | 850 |
| 110.9 | 18.5 | 8.5 | 10.3 | 0.635 | 11,302 | 12.5 | 5 | 0.83 | 36.0 | 35.7 | 0.038 | 6001 | 854 |
| 110.7 | 18.4 | 8.6 | 10.4 | 0.635 | 11,439 | 12.5 | 5 | 0.83 | 36.1 | 35.5 | 0.038 | 6077 | 851 |
| 110.6 | 18.4 | 8.8 | 10.7 | 0.635 | 11,739 | 12.0 | 5 | 0.84 | 36.5 | 35.0 | 0.039 | 6233 | 849 |
| 109.2 | 21.0 | 8.8 | 10.6 | 0.631 | 12,983 | 12.5 | 5 | 0.86 | 37.4 | 34.8 | 0.039 | 6902 | 1039 |
| 110.3 | 21.7 | 8.9 | 10.8 | 0.635 | 13,915 | 12.5 | 5 | 0.85 | 37.8 | 33.7 | 0.040 | 7428 | 1088 |
| 110.4 | 22.8 | 9.0 | 10.9 | 0.635 | 14,665 | 12.0 | 5 | 0.87 | 38.5 | 33.0 | 0.042 | 7812 | 1142 |
| 106.0 | 19.2 | 8.3 | 10.0 | 0.635 | 10,983 | 12.0 | 5 | 0.77 | 39.1 | 32.0 | 0.060 | 5861 | 848 |
| 110.9 | 18.5 | 8.1 | 9.8 | 0.635 | 10,800 | 11.5 | 5 | 0.77 | 39.1 | 30.3 | 0.061 | 5725 | 854 |
| 110.8 | 18.5 | 8.8 | 10.7 | 0.635 | 11,725 | 12.0 | 5 | 0.77 | 39.6 | 29.4 | 0.061 | 6223 | 853 |
| 110.8 | 18.6 | 8.9 | 10.8 | 0.635 | 11,946 | 11.0 | 5 | 0.77 | 40.1 | 28.8 | 0.064 | 6342 | 858 |
| 110.8 | 21.3 | 8.9 | 10.8 | 0.635 | 13,722 | 12.0 | 5 | 0.77 | 40.9 | 28.5 | 0.065 | 7324 | 1072 |
| 110.8 | 22.4 | 8.9 | 10.8 | 0.635 | 14,431 | 11.5 | 5 | 0.77 | 41.7 | 27.9 | 0.067 | 7691 | 1129 |
| 110.6 | 24.6 | 8.8 | 10.7 | 0.635 | 15,601 | 11.5 | 5 | 0.77 | 42.3 | 27.2 | 0.069 | 8343 | 1335 |
| 110.9 | 25.0 | 9.0 | 10.9 | 0.635 | 16,184 | 11.0 | 5 | 0.77 | 43.1 | 26.7 | 0.071 | 8638 | 1361 |
| Case 3: | |||||||||||||
| 110.7 | 18.5 | 6.5 | 7.8 | 0.635 | 8660 | 13.5 | 5 | 0.84 | 47.1 | 42.9 | 0.034 | 4534 | 853 |
| 110.6 | 18.5 | 6.9 | 8.3 | 0.635 | 9189 | 13.0 | 5 | 0.84 | 47.5 | 40.6 | 0.035 | 4834 | 851 |
| 110.8 | 18.5 | 7.3 | 8.8 | 0.635 | 9763 | 13.0 | 5 | 0.84 | 47.8 | 39.0 | 0.036 | 5163 | 852 |
| 110.8 | 18.5 | 7.9 | 9.5 | 0.635 | 10,536 | 13.0 | 5 | 0.83 | 48.6 | 37.3 | 0.036 | 5581 | 853 |
| 110.6 | 18.5 | 7.2 | 8.7 | 0.635 | 9636 | 13.0 | 5 | 0.76 | 49.8 | 33.6 | 0.056 | 5095 | 853 |
| 110.6 | 18.4 | 7.4 | 8.8 | 0.635 | 9724 | 13.0 | 5 | 0.77 | 50.0 | 33.3 | 0.056 | 5139 | 847 |
| 110.5 | 18.3 | 7.9 | 9.6 | 0.635 | 10,472 | 12.9 | 5 | 0.77 | 50.6 | 31.9 | 0.058 | 5556 | 843 |
| 110.8 | 18.4 | 7.9 | 9.5 | 0.635 | 10,441 | 12.0 | 5 | 0.76 | 51.2 | 31.1 | 0.059 | 5531 | 850 |
| 110.8 | 18.4 | 8.1 | 9.8 | 0.635 | 10,814 | 12.0 | 5 | 0.76 | 51.6 | 30.5 | 0.060 | 5738 | 852 |
| 110.6 | 18.5 | 8.4 | 10.2 | 0.635 | 11,209 | 12.0 | 5 | 0.77 | 51.9 | 30.0 | 0.060 | 5956 | 850 |
| 110.8 | 18.5 | 9.0 | 10.9 | 0.635 | 11,941 | 12.5 | 5 | 0.77 | 52.5 | 29.4 | 0.061 | 6346 | 853 |
| 110.8 | 18.5 | 9.0 | 10.9 | 0.635 | 11,997 | 12.0 | 5 | 0.77 | 53.1 | 29.1 | 0.062 | 6361 | 854 |
| 110.7 | 19.3 | 8.9 | 10.8 | 0.635 | 12,426 | 11.4 | 5 | 0.77 | 54.1 | 29.1 | 0.064 | 6597 | 894 |
| 110.7 | 21.6 | 9.0 | 10.9 | 0.635 | 13,917 | 12.5 | 5 | 0.77 | 54.9 | 28.7 | 0.064 | 7420 | 1084 |
| 110.8 | 21.9 | 9.0 | 10.9 | 0.635 | 14,231 | 12.0 | 5 | 0.77 | 55.6 | 28.1 | 0.066 | 7584 | 1103 |
| 110.8 | 24.6 | 8.4 | 10.2 | 0.635 | 14,958 | 12.0 | 5 | 0.75 | 56.2 | 28.0 | 0.067 | 7998 | 1339 |
| 110.8 | 24.9 | 8.4 | 10.2 | 0.635 | 15,186 | 11.5 | 5 | 0.77 | 56.8 | 27.6 | 0.068 | 8123 | 1357 |
| 110.6 | 24.6 | 8.9 | 10.8 | 0.635 | 15,724 | 11.5 | 5 | 0.77 | 57.5 | 27.1 | 0.069 | 8405 | 1337 |
| 110.8 | 24.6 | 8.9 | 10.9 | 0.635 | 15,890 | 11.0 | 5 | 0.77 | 58.1 | 26.8 | 0.071 | 8498 | 1338 |
| 110.9 | 25.0 | 9.0 | 10.9 | 0.635 | 16,240 | 11.0 | 5 | 0.77 | 58.5 | 26.6 | 0.071 | 8679 | 1361 |
| Case 4: | |||||||||||||
| 110.5 | 18.4 | 7.0 | 8.4 | 0.635 | 9226 | 13.4 | 5 | 0.84 | 31.0 | 41.0 | 0.034 | 4863 | 849 |
| 110.7 | 18.5 | 7.2 | 8.7 | 0.635 | 9622 | 13.5 | 5 | 0.86 | 31.3 | 40.4 | 0.035 | 5070 | 853 |
| 110.4 | 18.2 | 7.6 | 9.1 | 0.632 | 9896 | 13.0 | 5 | 0.84 | 31.7 | 38.7 | 0.036 | 5214 | 840 |
| 110.8 | 18.4 | 7.7 | 9.3 | 0.635 | 10,242 | 12.9 | 5 | 0.83 | 31.7 | 38.0 | 0.036 | 5424 | 848 |
| 110.9 | 18.5 | 6.5 | 7.8 | 0.635 | 8751 | 13.0 | 5 | 0.77 | 32.5 | 35.8 | 0.054 | 4587 | 856 |
| 110.6 | 18.4 | 7.2 | 8.6 | 0.635 | 9528 | 13.0 | 5 | 0.77 | 32.6 | 33.7 | 0.056 | 5034 | 848 |
| 110.5 | 18.5 | 7.3 | 8.7 | 0.635 | 9660 | 12.5 | 5 | 0.77 | 32.9 | 33.1 | 0.057 | 5108 | 852 |
| 110.3 | 18.3 | 8.0 | 9.6 | 0.635 | 10,485 | 12.9 | 5 | 0.77 | 33.3 | 31.9 | 0.058 | 5557 | 842 |
| 110.3 | 18.4 | 8.0 | 9.6 | 0.635 | 10,510 | 11.9 | 5 | 0.76 | 33.6 | 31.0 | 0.059 | 5576 | 844 |
| 110.3 | 18.4 | 8.4 | 10.2 | 0.635 | 11128 | 12.0 | 5 | 0.77 | 34.0 | 30.1 | 0.060 | 5912 | 846 |
| 110.9 | 18.5 | 9.0 | 10.9 | 0.635 | 11,989 | 12.5 | 5 | 0.77 | 34.5 | 29.4 | 0.061 | 6370 | 853 |
| 110.8 | 18.7 | 8.9 | 10.7 | 0.635 | 11,923 | 11.5 | 5 | 0.76 | 34.9 | 29.0 | 0.063 | 6337 | 862 |
| 110.8 | 19.0 | 9.0 | 10.9 | 0.635 | 12,329 | 11.5 | 5 | 0.76 | 35.3 | 29.0 | 0.063 | 6548 | 880 |
| 110.8 | 21.0 | 8.9 | 10.8 | 0.635 | 13,536 | 12.0 | 5 | 0.76 | 35.9 | 28.6 | 0.065 | 7221 | 1057 |
| 110.9 | 21.4 | 9.0 | 10.9 | 0.635 | 13,854 | 12.0 | 5 | 0.76 | 36.2 | 28.4 | 0.065 | 7383 | 1075 |
| 110.6 | 22.7 | 8.6 | 10.5 | 0.635 | 14,131 | 11.5 | 5 | 0.77 | 36.7 | 28.4 | 0.067 | 7527 | 1142 |
| 110.7 | 24.8 | 8.4 | 10.2 | 0.635 | 14,995 | 11.5 | 5 | 0.77 | 37.1 | 27.7 | 0.068 | 8019 | 1347 |
| 110.6 | 24.5 | 9.0 | 10.9 | 0.633 | 15,830 | 12.5 | 5 | 0.77 | 37.5 | 27.6 | 0.068 | 8439 | 1332 |
| 110.8 | 24.7 | 9.0 | 10.9 | 0.635 | 15,978 | 12.0 | 5 | 0.76 | 37.8 | 27.2 | 0.069 | 8526 | 1342 |
| 110.8 | 25.0 | 9.0 | 10.9 | 0.635 | 16,216 | 11.0 | 5 | 0.77 | 38.4 | 26.6 | 0.071 | 8665 | 1359 |
| Case 5: | |||||||||||||
| 108.0 | 18.0 | 4.5 | 6.3 | 0.622 | 5646 | 13.5 | 5 | 0.80 | 122.1 | 160.6 | 0.030 | 2403 | 814 |
| 108.8 | 18.3 | 4.6 | 6.2 | 0.624 | 5922 | 12.9 | 5 | 0.84 | 122.3 | 157.2 | 0.031 | 2647 | 833 |
| 107.8 | 18.8 | 4.9 | 6.0 | 0.624 | 6368 | 12.4 | 5 | 0.84 | 123.8 | 154.4 | 0.032 | 3104 | 846 |
| 109.2 | 20.7 | 5.2 | 6.6 | 0.621 | 7531 | 13.9 | 5 | 0.86 | 123.8 | 145.7 | 0.031 | 3637 | 1028 |
| 109.2 | 20.4 | 5.2 | 6.7 | 0.621 | 7443 | 12.5 | 5 | 0.86 | 125.0 | 141.6 | 0.032 | 3542 | 1017 |
| 109.4 | 21.2 | 5.5 | 6.6 | 0.625 | 8122 | 12.5 | 5 | 0.87 | 127.2 | 139.7 | 0.034 | 4115 | 1059 |
| 109.2 | 18.5 | 4.7 | 6.0 | 0.627 | 6108 | 12.0 | 5 | 0.73 | 132.3 | 131.3 | 0.050 | 2865 | 843 |
| 110.5 | 18.4 | 4.9 | 6.1 | 0.632 | 6453 | 12.0 | 5 | 0.76 | 135.3 | 128.3 | 0.051 | 3131 | 850 |
| 109.6 | 20.9 | 5.4 | 6.7 | 0.624 | 7946 | 12.5 | 5 | 0.75 | 138.1 | 121.1 | 0.053 | 3954 | 1045 |
| 108.5 | 23.5 | 5.9 | 7.6 | 0.616 | 9543 | 12.0 | 5 | 0.76 | 146.1 | 113.9 | 0.056 | 4628 | 1261 |
| 108.9 | 24.2 | 6.2 | 7.4 | 0.619 | 10,281 | 11.5 | 5 | 0.76 | 148.8 | 111.6 | 0.059 | 5282 | 1301 |
| 108.8 | 24.1 | 6.5 | 7.8 | 0.618 | 10,784 | 12.0 | 5 | 0.77 | 155.4 | 111.1 | 0.059 | 5579 | 1296 |
| 106.2 | 24.3 | 6.4 | 9.4 | 0.598 | 10,129 | 11.0 | 5 | 0.77 | 159.5 | 109.7 | 0.056 | 4139 | 1380 |
| 105.6 | 23.7 | 6.7 | 9.7 | 0.594 | 10,197 | 10.4 | 5 | 0.76 | 166.5 | 109.6 | 0.058 | 4161 | 1340 |
| 106.1 | 24.8 | 7.3 | 9.7 | 0.596 | 11,691 | 11.0 | 5 | 0.75 | 172.9 | 108.5 | 0.060 | 5325 | 1412 |
| 103.8 | 25.0 | 7.9 | 11.1 | 0.577 | 12,099 | 11.5 | 5 | 0.76 | 176.9 | 106.6 | 0.058 | 4961 | 1504 |
| 105.8 | 23.5 | 6.4 | 8.1 | 0.610 | 9928 | 6.5 | 8 | 2.44 | 227.6 | 99.3 | 0.102 | 2955 | 1232 |
| Case 6: | |||||||||||||
| 109.6 | 18.3 | 4.6 | 6.0 | 0.625 | 5933 | 14.5 | 5 | 0.92 | 79.3 | 171.8 | 0.027 | 2670 | 841 |
| 109.0 | 18.6 | 4.8 | 5.9 | 0.628 | 6218 | 14.0 | 5 | 0.87 | 80.6 | 161.2 | 0.030 | 2961 | 847 |
| 109.0 | 20.3 | 5.1 | 6.8 | 0.620 | 7239 | 13.4 | 5 | 0.86 | 82.9 | 145.1 | 0.031 | 3352 | 1010 |
| 109.0 | 18.7 | 4.9 | 6.0 | 0.626 | 6362 | 12.0 | 5 | 0.84 | 82.9 | 151.8 | 0.033 | 3088 | 850 |
| 108.7 | 18.3 | 4.6 | 6.0 | 0.624 | 5841 | 13.5 | 5 | 0.76 | 83.1 | 136.0 | 0.047 | 2642 | 832 |
| 110.1 | 18.3 | 4.8 | 6.0 | 0.629 | 6264 | 12.5 | 5 | 0.76 | 85.6 | 129.2 | 0.050 | 3011 | 843 |
| 109.0 | 20.7 | 5.4 | 6.9 | 0.620 | 7676 | 11.5 | 5 | 0.76 | 92.2 | 120.5 | 0.054 | 3667 | 1028 |
| 107.6 | 22.8 | 5.9 | 8.0 | 0.610 | 9017 | 11.9 | 5 | 0.77 | 97.9 | 114.7 | 0.054 | 4081 | 1214 |
| 108.8 | 23.9 | 6.3 | 7.6 | 0.618 | 10,396 | 11.5 | 5 | 0.76 | 101.6 | 111.3 | 0.059 | 5323 | 1287 |
| 106.2 | 24.4 | 6.5 | 9.5 | 0.598 | 10,295 | 11.0 | 5 | 0.77 | 108.2 | 109.9 | 0.057 | 4207 | 1388 |
| 106.3 | 24.5 | 7.0 | 9.7 | 0.597 | 11,171 | 12.0 | 5 | 0.77 | 112.2 | 109.3 | 0.057 | 4876 | 1394 |
| 106.0 | 24.8 | 7.3 | 9.7 | 0.595 | 11,664 | 10.5 | 5 | 0.77 | 117.7 | 107.9 | 0.061 | 5302 | 1410 |
| 103.5 | 25.0 | 8.0 | 11.2 | 0.575 | 12,157 | 11.0 | 5 | 0.77 | 121.5 | 106.6 | 0.059 | 4986 | 1499 |
| 107.5 | 24.3 | 6.9 | 8.4 | 0.610 | 11,323 | 6.4 | 8 | 2.50 | 168.5 | 98.2 | 0.106 | 3726 | 1295 |
| 105.3 | 25.0 | 7.8 | 10.0 | 0.591 | 12,346 | 6.2 | 8 | 2.47 | 182.0 | 97.8 | 0.108 | 3678 | 1413 |
| Case 7: | |||||||||||||
| 108.8 | 20.0 | 5.0 | 7.0 | 0.617 | 6867 | 15.0 | 8 | 1.84 | 86.1 | 240.7 | 0 | 1801 | 991 |
| 107.7 | 21.9 | 5.5 | 8.2 | 0.608 | 8042 | 15.5 | 7 | 1.85 | 86.3 | 230.7 | 0 | 2293 | 1166 |
| 107.7 | 21.9 | 5.5 | 8.3 | 0.608 | 8079 | 14.5 | 7 | 1.83 | 87.0 | 220.5 | 0 | 2331 | 1165 |
| 108.0 | 22.4 | 5.6 | 8.0 | 0.611 | 8464 | 14.5 | 8 | 1.85 | 87.9 | 208.7 | 0 | 2354 | 1195 |
| 108.2 | 22.9 | 5.7 | 7.8 | 0.612 | 8921 | 14.0 | 8 | 1.83 | 89.9 | 203.0 | 0 | 2743 | 1225 |
| 108.0 | 22.8 | 5.9 | 8.0 | 0.611 | 9175 | 14.0 | 8 | 1.83 | 91.8 | 199.7 | 0 | 2918 | 1220 |
| 108.4 | 23.9 | 6.1 | 7.5 | 0.615 | 9903 | 13.5 | 8 | 1.83 | 93.4 | 193.6 | 0 | 3586 | 1282 |
| 106.4 | 25.0 | 6.6 | 9.4 | 0.598 | 10,788 | 13.5 | 8 | 1.84 | 96.0 | 184.7 | 0 | 3155 | 1423 |
| 106.5 | 24.6 | 6.6 | 9.4 | 0.599 | 10,647 | 13.0 | 8 | 1.83 | 97.4 | 182.8 | 0 | 3100 | 1404 |
| 106.4 | 24.7 | 6.7 | 9.5 | 0.597 | 10,833 | 13.0 | 8 | 1.87 | 98.5 | 182.7 | 0 | 3187 | 1408 |
| 106.1 | 24.5 | 6.8 | 9.6 | 0.596 | 10,773 | 12.9 | 8 | 1.84 | 99.2 | 182.5 | 0 | 3164 | 1392 |
| 106.4 | 24.7 | 6.9 | 9.6 | 0.597 | 11,056 | 13.0 | 8 | 1.86 | 100.3 | 181.8 | 0 | 3320 | 1408 |
| 106.1 | 24.7 | 7.0 | 9.6 | 0.596 | 11,266 | 13.0 | 8 | 1.89 | 101.7 | 181.6 | 0 | 3484 | 1407 |
| 106.0 | 25.0 | 7.3 | 9.6 | 0.596 | 11,742 | 13.0 | 8 | 1.83 | 104.2 | 181.0 | 0 | 3886 | 1421 |
| 105.2 | 25.0 | 7.2 | 9.6 | 0.595 | 11,568 | 12.5 | 8 | 1.85 | 105.1 | 180.8 | 0 | 3781 | 1411 |
| 102.9 | 25.0 | 8.3 | 11.1 | 0.571 | 12,521 | 13.0 | 8 | 1.83 | 107.7 | 178.2 | 0 | 3847 | 1495 |
| 103.4 | 24.9 | 8.3 | 11.2 | 0.574 | 12,556 | 13.0 | 8 | 1.83 | 108.1 | 178.5 | 0 | 3798 | 1497 |
| 102.9 | 25.0 | 8.2 | 11.1 | 0.572 | 12,407 | 12.0 | 8 | 1.83 | 110.9 | 177.9 | 0 | 3774 | 1494 |
References
- York, R.; Bell, S.E. Energy transitions or additions?: Why a transition from fossil fuels requires more than the growth of renewable energy. Energy Res. Soc. Sci. 2019, 51, 40–43. [Google Scholar] [CrossRef]
- Panichkin, I. Arctic Oil and Gas Resource Development: Current Situation and Prospects; Russia International Affairs Council: Moscow, Russia, 2016; pp. 3–10. [Google Scholar]
- Watson, D.G. Practical Ship Design; Elsevier: Oxford, UK, 1998; pp. 495–497. [Google Scholar] [CrossRef]
- IMO. Energy Efficiency Measures. Available online: https://www.imo.org/en/OurWork/Environment/Pages/Technical-and-Operational-Measures.aspx. (accessed on 18 April 2021).
- IMO. Resolution MEPC.308(73) 2018 Guidelines on the Method of Calculation of the Attained Energy; International Maritime Organization: London, UK, 2018; pp. 1–36. [Google Scholar]
- Trivyza, N.L.; Rentizelas, A.; Theotokatos, G. A Comparative Analysis of EEDI Versus Lifetime CO2 Emissions. J. Mar. Sci. Eng. 2020, 8, 61. [Google Scholar] [CrossRef] [Green Version]
- Tarovik, O.V.; Topaj, A.G.; Krestyantsev, A.B.; Kondratenko, A.A.; Zaikin, D.A. Study on operation of Arctic offshore complex by means of multicomponent process-based simulation. JMSA 2018, 17, 471–497. [Google Scholar] [CrossRef]
- Papanikolaou, A. Holistic ship design optimization. Comput. Aided Des. 2010, 42, 1028–1044. [Google Scholar] [CrossRef]
- Gutsch, M.; Steen, S.; Sprenger, F. Operability robustness index as seakeeping performance criterion for offshore vessels. Ocean Eng. 2020, 217, 107931. [Google Scholar] [CrossRef]
- Marques, C.H.; Belchior, C.R.; Caprace, J. An early-stage approach to optimise a marine energy system for liquefied natural gas carriers: Part A—Developed approach. Ocean Eng. 2019, 181, 161–172. [Google Scholar] [CrossRef]
- Priftis, A.; Evangelos, B.; Osman, T.; Papanikolaou, A. Parametric design and multi-objective optimisation of containerships. Ocean Eng. 2018, 156, 347–357. [Google Scholar] [CrossRef] [Green Version]
- Kanellopoulou, A.; Kytariolou, A.; Papanikolaou, A.; Shigunov, V.; Zaraphonitis, G. Parametric ship design and optimisation of cargo vessels for efficiency and safe operation in adverse weather conditions. J. Mar. Sci. Technol. 2019, 24, 1223–1240. [Google Scholar] [CrossRef]
- Skoupas, S.; Zaraphonitis, G.; Papanikolaou, A. Parametric design and optimisation of high-speed Ro-Ro Passenger ships. Ocean Eng. 2019, 189, 10634. [Google Scholar] [CrossRef]
- Peri, D. Direct Tracking of the Pareto Front of a Multi-Objective Optimization Problem. J. Mar. Sci. Eng. 2020, 8, 699. [Google Scholar] [CrossRef]
- Martins, M.R.; Burgos, D.F. Multi-Objective Optimization Design of Tanker Ships via a Genetic Algorithm. J. Offshore Mech. Arct. Eng. 2011, 133, 041303. [Google Scholar] [CrossRef]
- Ray, T.; Gokarn, R.; Sha, O. A global optimization model for ship design. Comput Ind. 1995, 26, 175–192. [Google Scholar] [CrossRef]
- Kujala, P.; Goerlandt, F.; Way, B.; Smith, D.; Yang, M.; Khan, F.; Veitch, B. Review of risk-based design for ice-class ships. Mar. Struct. 2019, 63, 181–195. [Google Scholar] [CrossRef]
- Bergström, M.; Erikstad, S.; Ehlers, S. The Influence of model fidelity and uncertainties in the conceptual design of Arctic maritime transport systems. Ship Technol. Res. 2017, 64, 40–64. [Google Scholar] [CrossRef]
- Topaj, A.G.; Tarovik, O.V.; Bakharev, A.A.; Kondratenko, A.A. Optimal ice routing of a ship with icebreaker assistance. Appl. Ocean Res. 2019, 86, 177–187. [Google Scholar] [CrossRef]
- Dobrodeev, A.; Sazonov, K. The estimation of carbonic gas emission by ice-class large-size ships moving in ice using different escorting methods. In Proceedings of the ASME 2016 35th International Conference on Ocean, Offshore and Arctic Engineering OMAE 2016, Busan, Korea, 18–24 June 2016. [Google Scholar] [CrossRef]
- Kondratenko, A.A.; Tarovik, O.V. Analysis of the impact of arctic-related factors on offshore support vessels design and fleet composition performance. Ocean Eng. 2020, 203, 107201. [Google Scholar] [CrossRef]
- Keßler, T.; Logist, F.; Mangold, M. Use of predictor corrector methods for multi-objective optimization of dynamic systems. In Proceedings of the 26th European Symposium on Computer Aided Process Engineering—ESCAPE 26, Portorož, Slovenia, 12–15 June 2016. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Kondratenko, A.A.; Tarovik, O.V. Cargo-Flow-Oriented Design of supply vessel operating in ice conditions. In Proceedings of the ASME 2018 37th International Conference on Ocean, Offshore and Arctic Engineering OMAE2018, Madrid, Spain, 17–22 June 2018. [Google Scholar] [CrossRef]
- RS. International Association of Classification Societies. Symbols of the Classification Of Ships. Directory No 2-029901-002; The Russia Maritime Register of Shipping: St. Petersburg, Russia, 2015; pp. 28–35. [Google Scholar]
- IMO. Revised Guidance to the Master for Avoiding Dangerous Situations in Adverse Weather and Sea Conditions; International Maritime Organization: London, UK, 2007; pp. 1–8. [Google Scholar]
- The Federal Tariff Service. Decree No 45-T/1 on the Approval of Tariffs for Icebreaker Assistance of Ships, Provided by FSUE Atomflot on the Northern Sea Route; FST: Moscow, Russia, 2014; pp. 1–5. [Google Scholar]
- Brovin, A.I.; Klyachkin, S.V. Application of an empirical-statistical model of ship motion in ice to new types of icebreakers and ships. In Proceedings of the ASME 1997 16th International Conference on Ocean, Offshore and Arctic Engineering OMAE 1997, Yokohama, Japan, 13–17 April 1997. [Google Scholar]
- CNIIMF. Study of Special Features of Winter Navigations in GoF and Development Algorithms and Models for Calculations the Ship Movement in Ice with the Aim to Use Them in Risk Model When Evaluating the RCO Efficiency within the Frame of the WINOIL Project Works; Central Marine Research and Design Institute: St. Petersburg, Russia, 2014. [Google Scholar]
- Rao, S.K.; Chauhan, P.J.; Panda, S.K.; Wilson, G.; Liu, X.; Gupta, A.K. Optimal scheduling of diesel generators in offshore support vessels to minimize fuel consumption. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–19 November 2015. [Google Scholar] [CrossRef]
- Buzuev, A.Y.; Dubovtsev, V.F.; Zakharov, V.F.; Smirnov, V.I. Conditions of Navigation in Sea Ice of the Northern Hemisphere; GUNIO USSR: Leningrad, USSR, 1988; pp. 154–157. (In Russian) [Google Scholar]
- Arctic and Antarctic Research Institute. Center of Ice & Hydrometeorological Information. Available online: http://www.aari.ru/main.php?lg=0&id=17 (accessed on 22 September 2020).
- Shalina, E.V.; Sandven, S. Snow depth on Arctic sea ice from historical in situ data. Cryosphere 2018, 12, 1867–1886. [Google Scholar] [CrossRef] [Green Version]
- Dumanskaya, I.O. Sea Ice Condition of European Russia; IG-SOTSIN: Obninsk, Russia, 2014; pp. 11–213. (In Russian) [Google Scholar]
- Kondratenko, A.; Tarovik, O. OSVs Characteristics Database. xlsx. Available online: https://www.researchgate.net/publication/340461340_OSVs_characteristics_databasexlsx_from_the_article_Analysis_of_the_impact_of_arctic-related_factors_on_offshore_support_vessels_design_and_fleet_composition_performance (accessed on 15 May 2021). [CrossRef]













| Case Study | Discount Rate (%) | Cargo Capacity Parameter | Operation Period (Years) | Icebreaker Assistance (Yes/No) |
|---|---|---|---|---|
| 1 | 6 | Dw | 10 | + |
| 2 | 6 | Dw | 20 | + |
| 3 | 12 | Dw | 10 | + |
| 4 | 12 | Dw | 20 | + |
| 5 | 6 | Scargo | 10 | + |
| 6 | 12 | Scargo | 20 | + |
| 7 | 12 | Scargo | 20 | - |
| Parameter | Min. | Max. |
|---|---|---|
| Length between perpendiculars, m | 50 | 100 |
| Beam, m | 13 | 25 |
| Draft, m | 3.5 | 9 |
| Block coefficient | 0.57 | 0.78 |
| Depth, m | 5 | 13.5 |
| Icebreaking capability, m | 0 | 2.8 |
| Case Study 1 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 110.8 | 18.4 | 6.8 | 9041 | 0.635 | 6025 | 13.5 | 5 | 0.83 | 0.034 | 4756 | 851 |
| Intermediate | 110.1 | 22.1 | 9.0 | 14228 | 0.634 | 8209 | 12.0 | 5 | 0.86 | 0.041 | 7559 | 1107 |
| Min EKPI | 110.8 | 25.0 | 9.0 | 16189 | 0.635 | 9551 | 11.0 | 5 | 0.77 | 0.071 | 8653 | 1360 |
| Case Study 2 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 110.2 | 18.5 | 6.9 | 9152 | 0.635 | 6077 | 13.5 | 5 | 0.83 | 0.034 | 4820 | 851 |
| Intermediate | 110.3 | 21.7 | 8.9 | 13915 | 0.635 | 8064 | 12.5 | 5 | 0.85 | 0.040 | 7428 | 1088 |
| Min EKPI | 110.9 | 25.0 | 9.0 | 16184 | 0.635 | 9551 | 11.0 | 5 | 0.77 | 0.071 | 8638 | 1361 |
| Case 3 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 110.7 | 18.5 | 6.5 | 8660 | 0.635 | 5970 | 13.5 | 5 | 0.84 | 0.034 | 4534 | 853 |
| Intermediate | 110.6 | 18.5 | 8.4 | 11,209 | 0.635 | 6512 | 12.0 | 5 | 0.77 | 0.060 | 5956 | 850 |
| Min EKPI | 110.9 | 25.0 | 9.0 | 16,240 | 0.635 | 9563 | 11.0 | 5 | 0.77 | 0.071 | 8679 | 1361 |
| Case 4 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 110.5 | 18.4 | 7.0 | 9226 | 0.635 | 6070 | 13.4 | 5 | 0.84 | 0.034 | 4863 | 849 |
| Intermediate | 110.3 | 18.4 | 8.4 | 11,128 | 0.635 | 6483 | 12.0 | 5 | 0.77 | 0.060 | 5912 | 846 |
| Min EKPI | 110.8 | 25.0 | 9.0 | 16,216 | 0.635 | 9547 | 11.0 | 5 | 0.77 | 0.071 | 8665 | 1359 |
| Case 5 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 108.0 | 18.0 | 4.5 | 5646 | 0.622 | 5306 | 13.5 | 5 | 0.80 | 0.030 | 2403 | 814 |
| Intermediate | 109.6 | 20.9 | 5.4 | 7946 | 0.624 | 6497 | 12.5 | 5 | 0.75 | 0.053 | 3954 | 1045 |
| Min EKPI | 105.8 | 23.5 | 6.4 | 9928 | 0.610 | 39738 | 6.5 | 8 | 2.44 | 0.102 | 2955 | 1232 |
| Case 6 | ||||||||||||
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 109.6 | 18.3 | 4.6 | 5933 | 0.625 | 6523 | 14.5 | 5 | 0.92 | 0.027 | 2670 | 841 |
| Intermediate | 107.6 | 22.8 | 5.9 | 9017 | 0.610 | 7227 | 11.9 | 5 | 0.77 | 0.054 | 4081 | 1214 |
| Min EKPI | 105.3 | 25.0 | 7.8 | 12346 | 0.591 | 41917 | 6.2 | 8 | 2.47 | 0.108 | 3678 | 1413 |
| Case 7 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Caption | Lwl, m | B, m | T, m | ∆, t | Cbwl | Npp, kW | Vs, kn | Arc | hice, m | IButil | Dw, t | Sdeck, m2 |
| Min CKPI | 108.8 | 20.0 | 5.0 | 6867 | 0.617 | 21,082 | 15.0 | 8 | 1.84 | 0 | 1801 | 991 |
| Intermediate | 106.4 | 24.7 | 6.7 | 10,833 | 0.597 | 23,869 | 13.0 | 8 | 1.87 | 0 | 3187 | 1408 |
| Min EKPI | 102.9 | 25.0 | 8.2 | 12,407 | 0.572 | 23,139 | 12.0 | 8 | 1.83 | 0 | 3774 | 1494 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kondratenko, A.A.; Bergström, M.; Reutskii, A.; Kujala, P. A Holistic Multi-Objective Design Optimization Approach for Arctic Offshore Supply Vessels. Sustainability 2021, 13, 5550. https://doi.org/10.3390/su13105550
Kondratenko AA, Bergström M, Reutskii A, Kujala P. A Holistic Multi-Objective Design Optimization Approach for Arctic Offshore Supply Vessels. Sustainability. 2021; 13(10):5550. https://doi.org/10.3390/su13105550
Chicago/Turabian StyleKondratenko, Aleksander A., Martin Bergström, Aleksander Reutskii, and Pentti Kujala. 2021. "A Holistic Multi-Objective Design Optimization Approach for Arctic Offshore Supply Vessels" Sustainability 13, no. 10: 5550. https://doi.org/10.3390/su13105550
APA StyleKondratenko, A. A., Bergström, M., Reutskii, A., & Kujala, P. (2021). A Holistic Multi-Objective Design Optimization Approach for Arctic Offshore Supply Vessels. Sustainability, 13(10), 5550. https://doi.org/10.3390/su13105550