2.1. Optimization Process
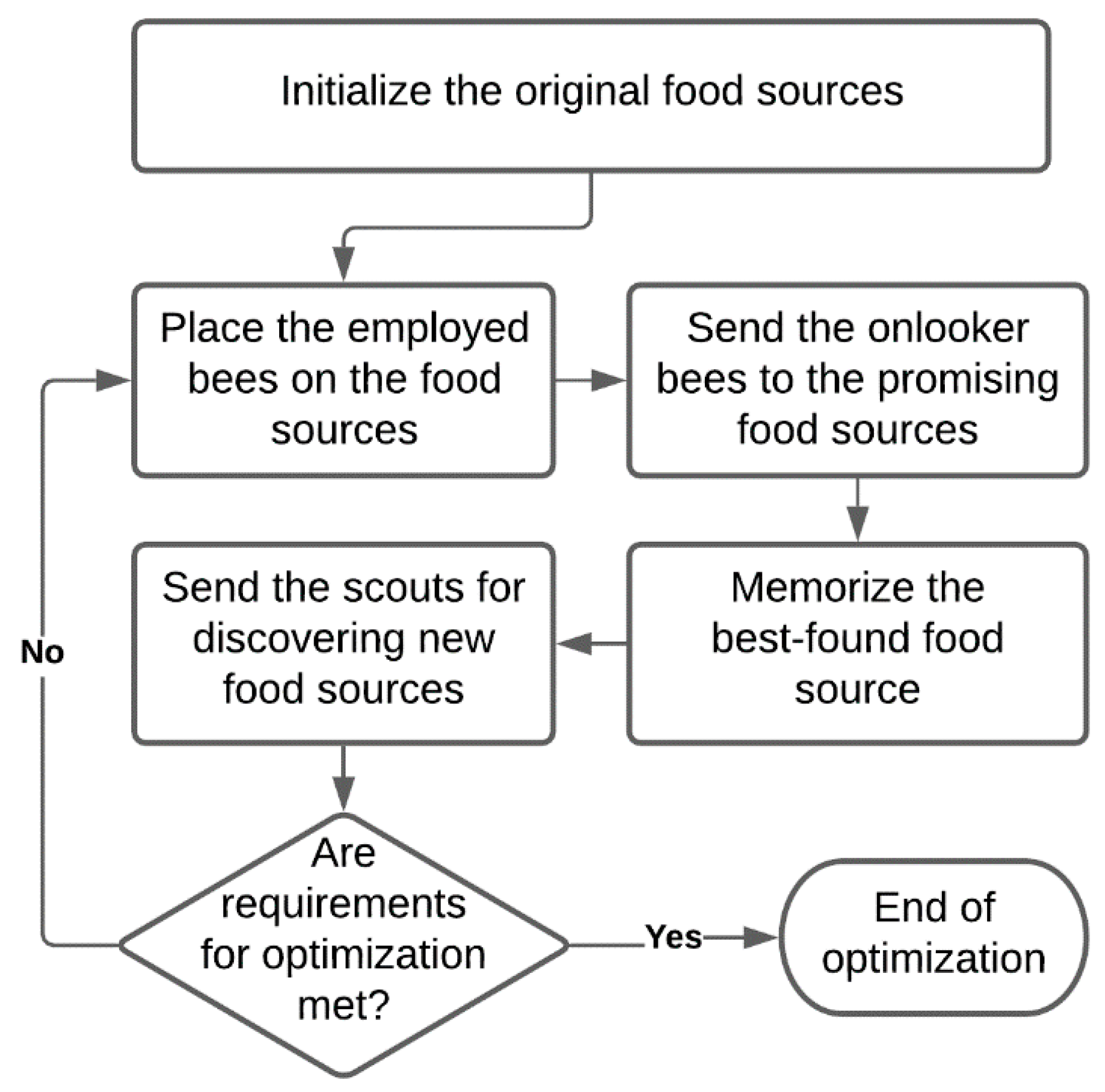
The proposed optimization approach solves a mixed-integer non-linear programming (MINLP) problem in a multi-objective formulation, applying an adaptation of the single-objective ABC algorithm. The ABC algorithm is based on the foraging strategies of honeybees [
23]. A general flow chart of the ABC algorithm is presented in
Figure 1. A detailed description of the algorithm is presented in [
23]. Each run of the ABC algorithm results in a Pareto front point representing a single optimal solution. A vessel evaluation model supplies the ABC algorithm with an estimation of the quality of a solution in terms of cost- and eco-efficiency. The ABC algorithm operates the model as a black box, which provides information about the solution’s feasibility and evaluates the value of the objective functions considered for each set of inputs.
The objective of the algorithm is to maximize the cost- and eco-efficiency of an Arctic OSV. The cost- and eco-efficiency of a vessel is measured in terms of a cost-efficiency key performance indicator (CKPI) and an eco-efficiency key performance indicator (EKPI), determined by adapting and simplifying the definitions of RFR [
3] and EEDI [
5], respectively (see
Section 2.2). The optimization process results in a Pareto front consisting of a set of Pareto-optimal vessel designs, representing different compromises between cost- and eco-efficiency.
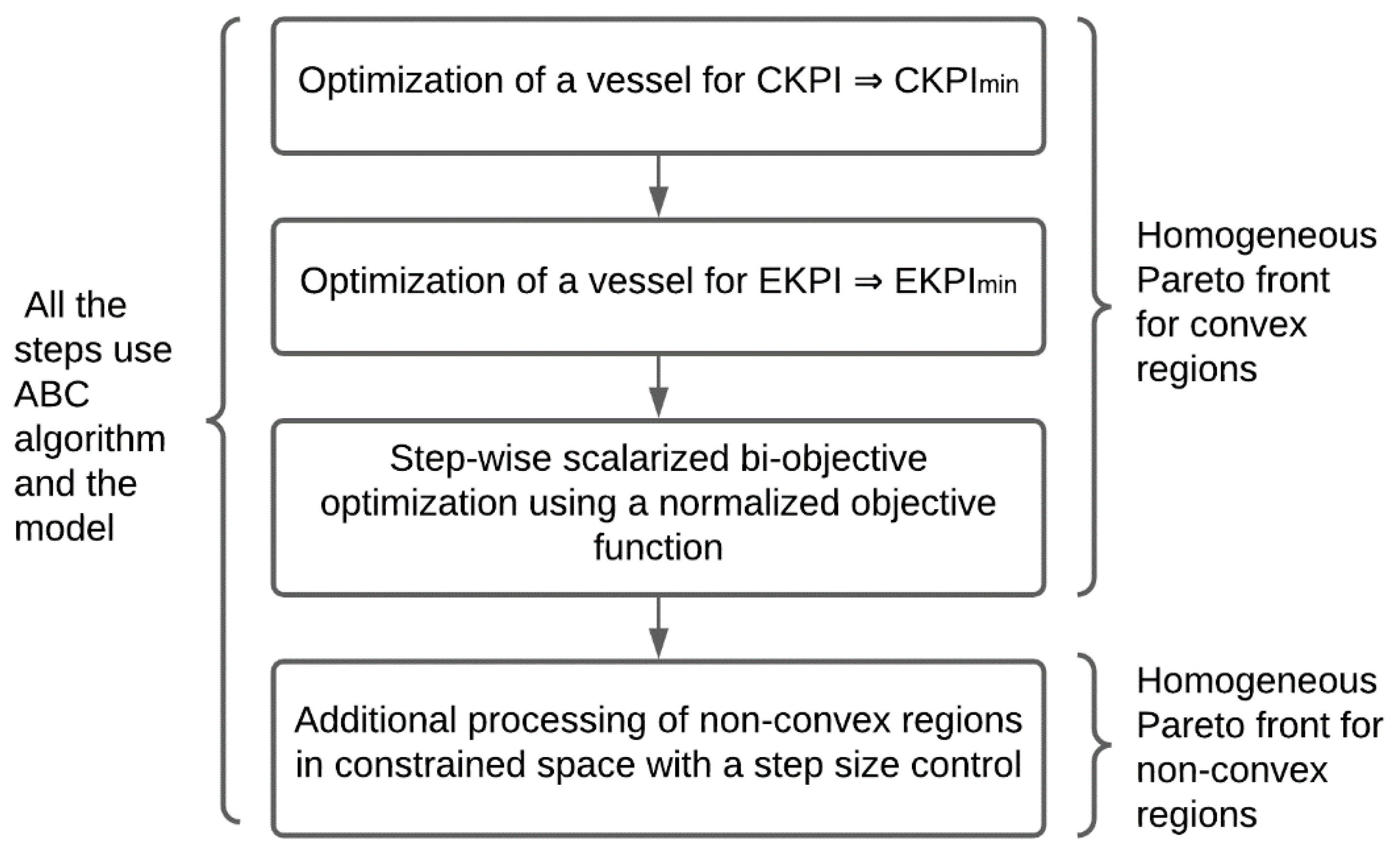
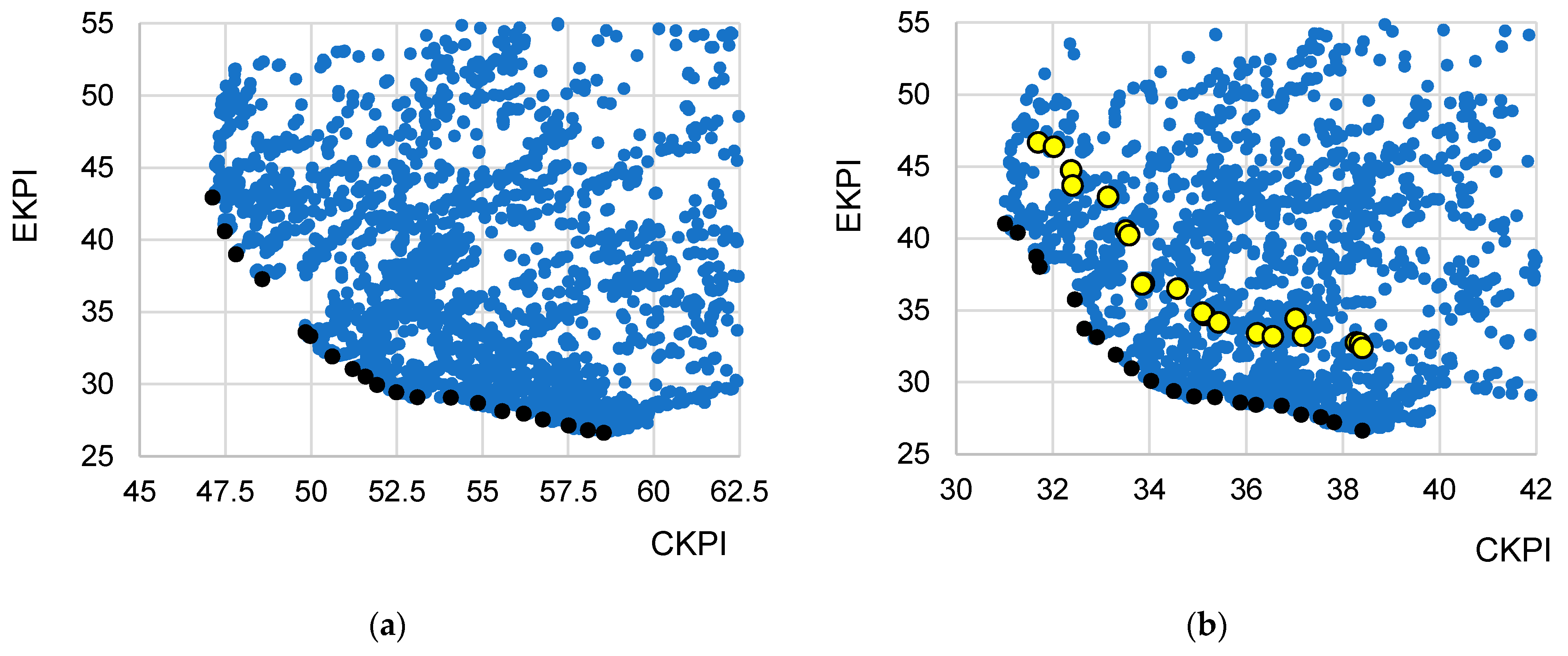
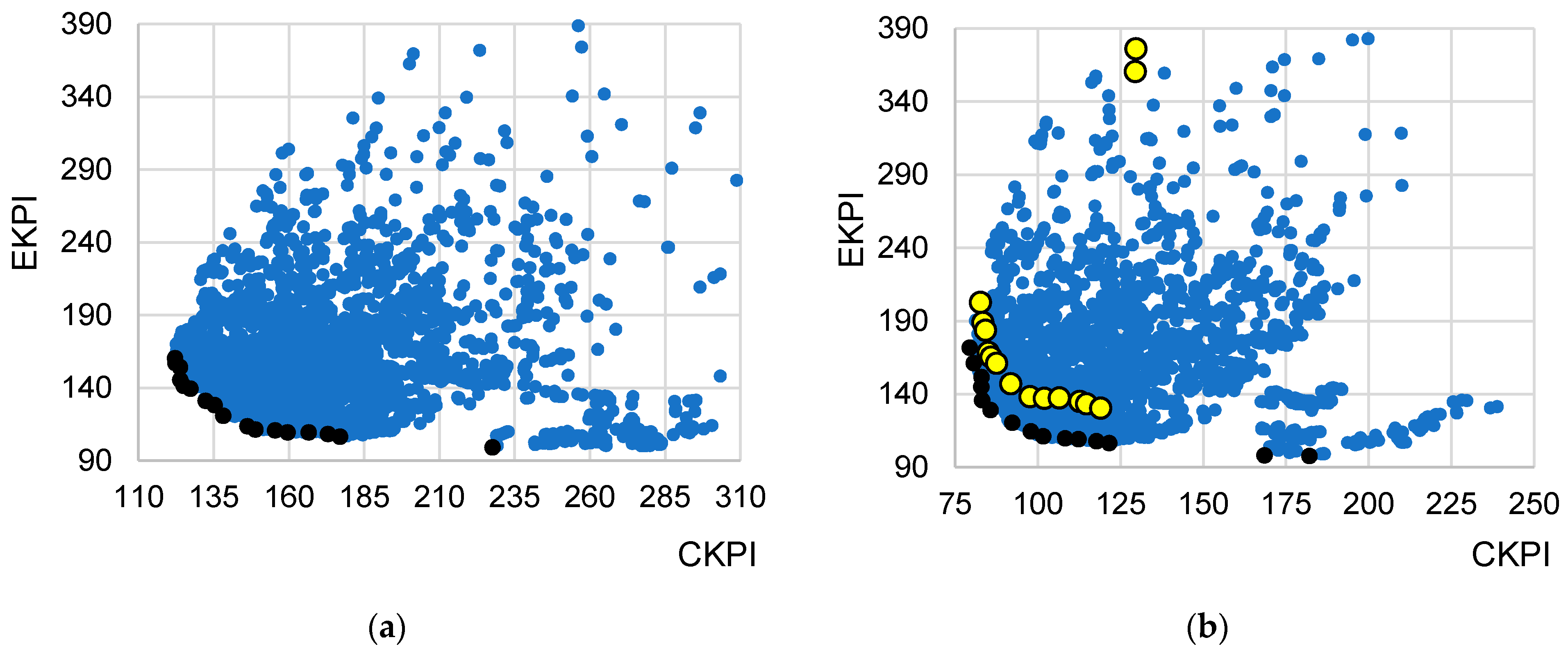
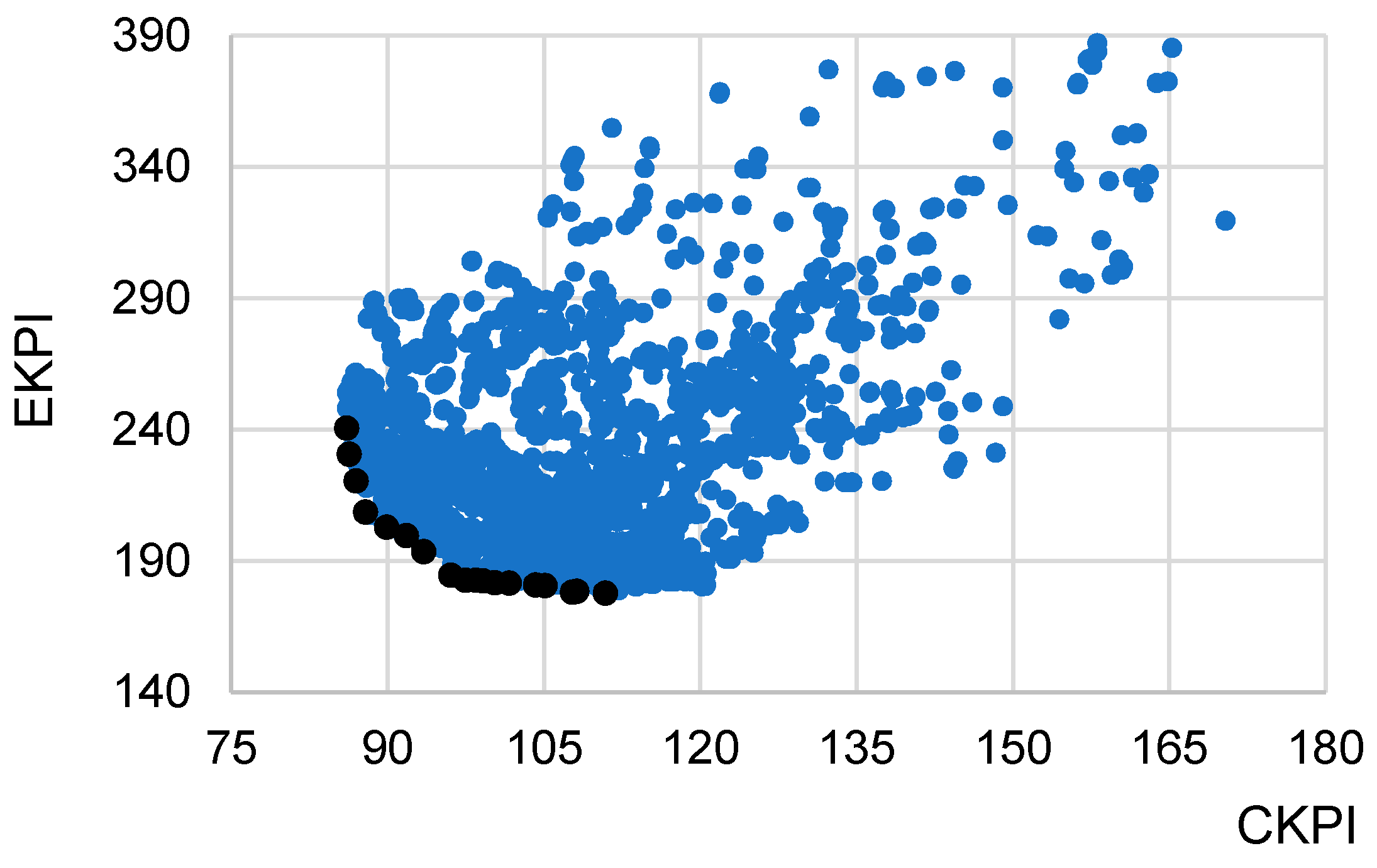
The quality of a Pareto front can be measured in terms of its homogeneity. A homogenous Pareto front is one in which the variations in the distances between consecutive points on the Pareto front are minor. This homogeneity measure is relevant because it represents the level of informativeness of a Pareto front for a decision-maker. In the case of complex scalarized optimization problems, the homogeneity often depends on the ability to find a Pareto front’s non-convex regions. This is because step-wise solution of an optimization problem using the weighted sum method can only specify the convex hull of the Pareto front [
22]. In addition, the convex hull obtained will not be sufficiently homogeneous if the value ranges of the optimization objectives differ significantly from each other. This means that the concentration of the Pareto points would be unevenly distributed in favor of the objective with higher values. In
Figure 2, we present a general flow chart of the algorithm to overcome these issues.
The proposed optimization process comprises two main phases. The first phase consists of a step-wise scalarized bi-objective optimization using a normalized objective function as per Equation (1). This ensures homogeneity for the convex parts of the Pareto front. The values of CKPI
min and EKPI
min are obtained in advance by two separate optimization runs. In the first run, CKPI is used as an optimization objective, whereas in the second run EKPI is used as an objective. This provides two boundary points of the Pareto front.
where w is a weighting factor defined in a range from 0 to 1. Starting from w = 0, the algorithm increases the value of w step-by-step by adding ∆w and finds an optimal solution, i.e., a new Pareto front point, while w < 1.
The second phase involves processing non-convex regions to provide missing points and homogeneity for the whole Pareto front. If the distance between two points exceeds a specific limit value (average distance + specific percentage × average distance), an additional constraint for either of the objectives is introduced to consider only the range between the points. Specifically, the algorithm divides the range by half and optimizes the unconstrained objective for each half of the range, resulting in two new Pareto front points. This process is repeated until the distance between all the points within the initial range is acceptable. Points that are too close to each other are dismissed.
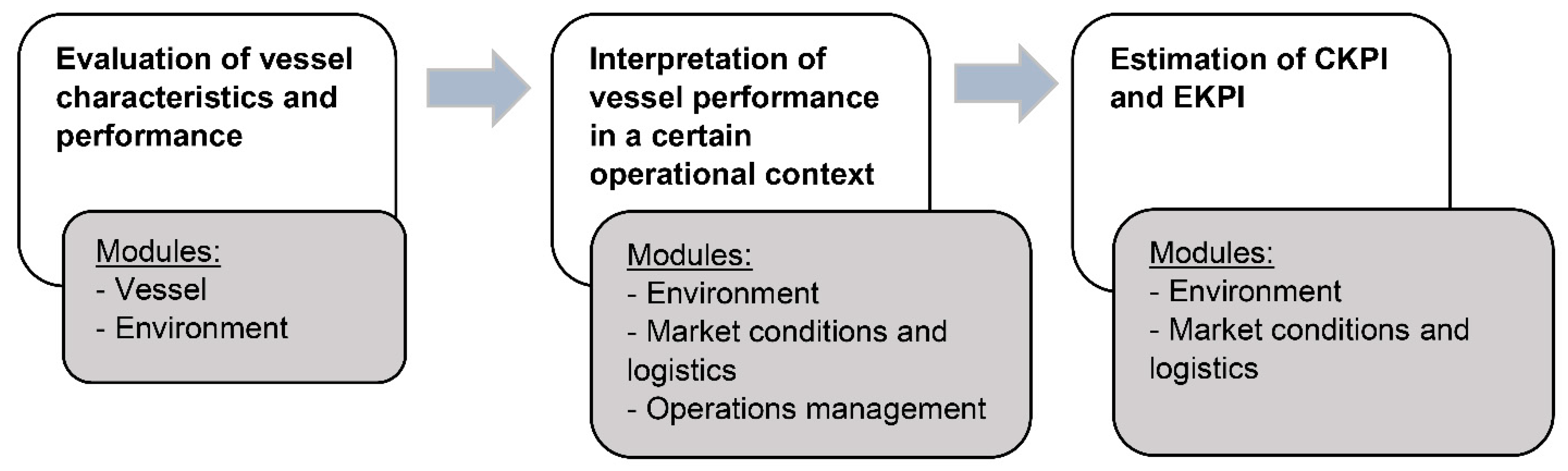
2.2. Vessel Evaluation Model
The vessel evaluation model, presented in
Figure 3, estimates a vessel’s EKPI and CKPI for a given set of inputs.
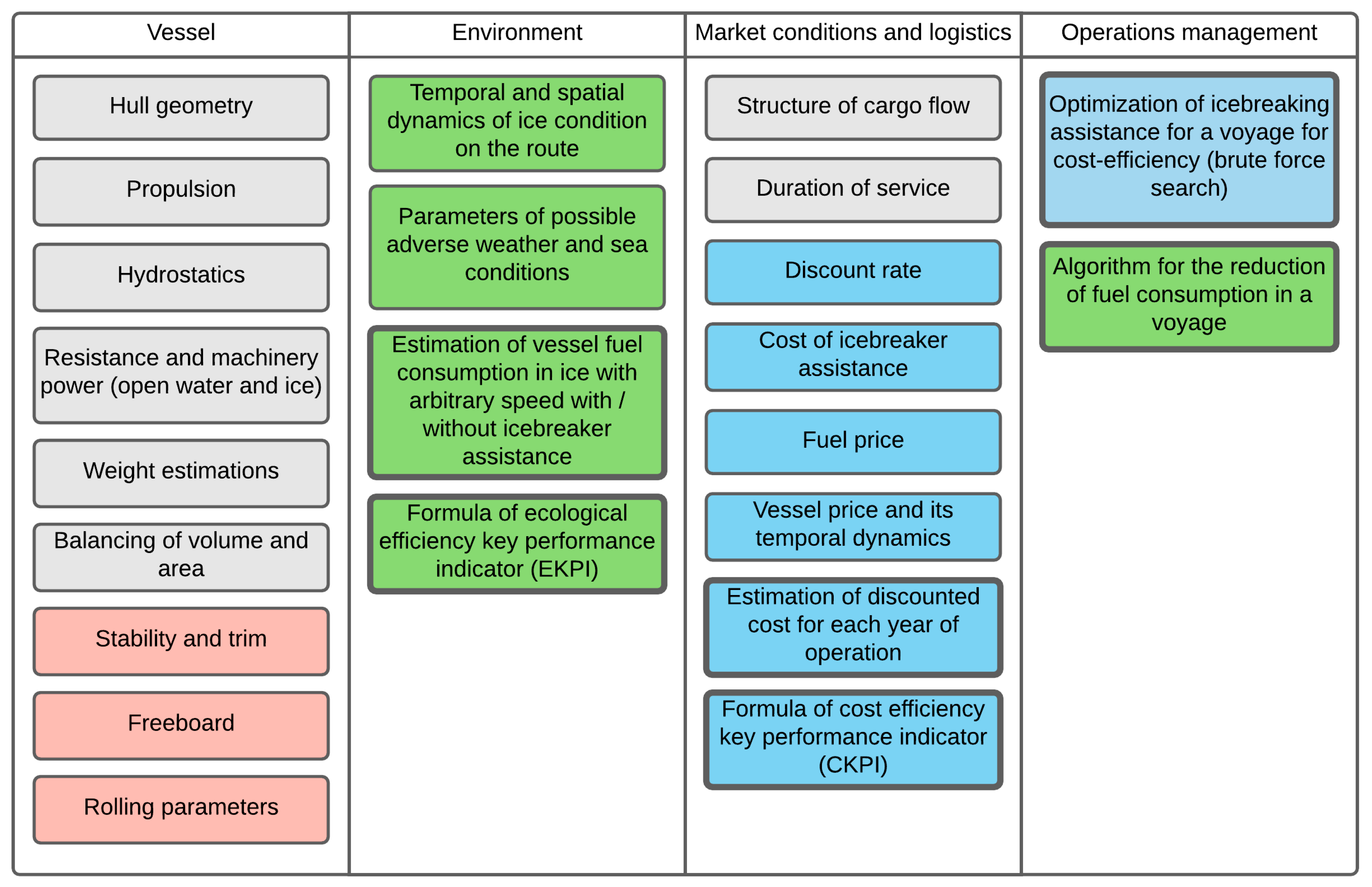
Figure 4 provides a module decomposition of the model. First, the model calculates a vessel’s performance, considering ship design characteristics only. Second, the model calculates a vessel’s performance in a specific operational context. We define the operational context in terms of parameters presented in
Figure 4.
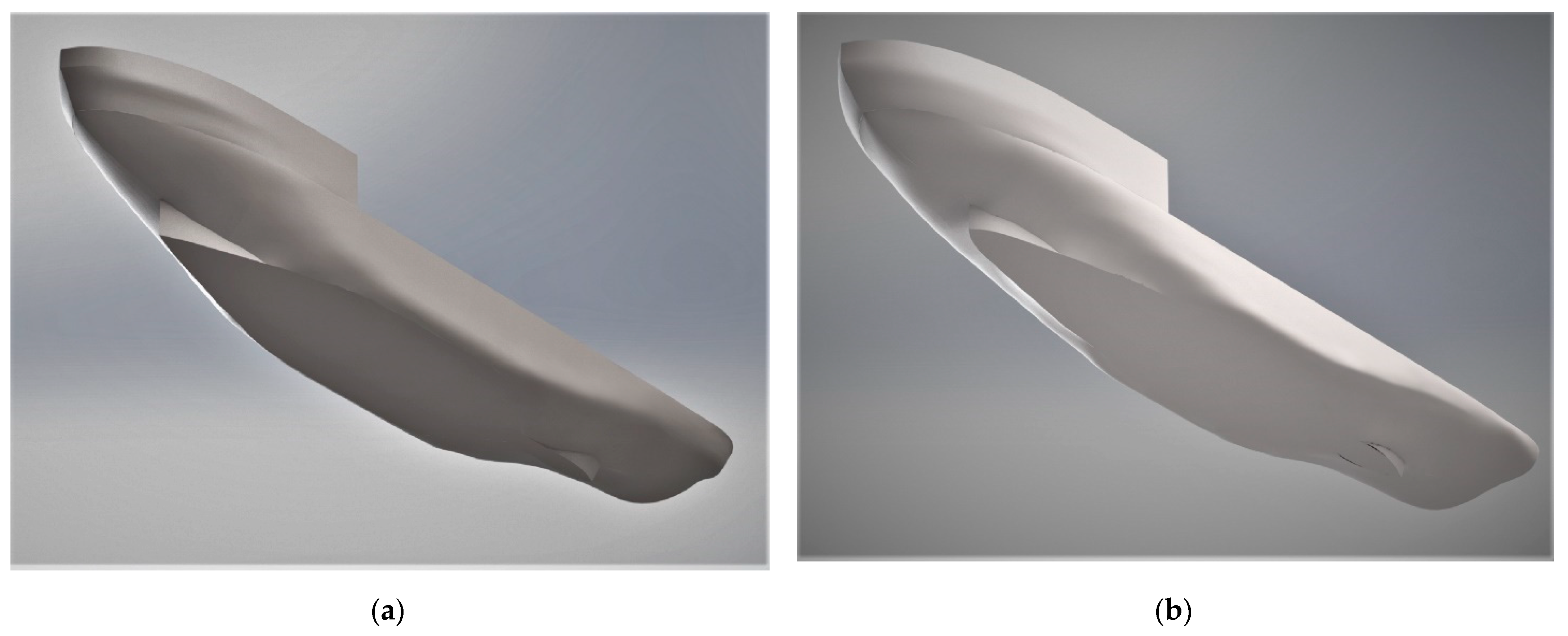
The vessel module (see
Figure 4) is based on a holistic parametric design model of an Arctic offshore support vessel, a detailed presentation of which is provided in Kondratenko et al. [
24] and Kondratenko et al. [
21]. The input parameters of the model are length between perpendiculars (L
pp), beam (B), draft (T), block coefficient (Cb
wl), depth (H), cruising speed in open water (V
s), ice class (Arc), and icebreaking capability (h
ice). The ice classes considered are determined as per the Russian Maritime Register of Shipping [
25]. The vessel module considers all of the essential ship qualities and related constraints, including the hull geometry, hydrostatics and stability, resistance and propulsion (in open water and ice), required power plant capacity, general arrangement criteria, estimations of lightweight and deadweight, cargo capacity, and freeboard criteria. This study also considers an additional constraint for the maximum tolerated vessel rolling to avoid dangerous situations in adverse weather and sea conditions [
26]. The rolling constraint considers related environmental characteristics of the intended operating area.
The parametric model of the vessel is verified using real-life data on Arctic and non-Arctic OSVs, including vessels with installed machinery power of up to 22,500 kW [
21]. It is noted that estimations of the required hull volume for vessels with an installed machinery power exceeding 22,500 kW are questionable as the layouts of very powerful vessels (e.g., specialized icebreakers) may differ from that of conventional OSVs.
Following the specification of a vessel’s design characteristics, we calculate the necessary parameters to estimate the values of the objective functions considering the vessel’s operational context. CKPI and EKPI are determined as per Formulas (2) and (3), which we adapted to fit Arctic OSVs. In the present model, Arctic OSVs are assumed to operate year-round with the option to call for icebreaker assistance if necessary. We assume that a vessel is bought at the beginning of the project. Equation (2) determines CKPI considering revenue corresponding to the assumed resale value of the considered vessel at the end of a project. The consideration of the resale value is important as an Arctic OSV is usually bought for a specific offshore project at a significant price, meaning that a vessel’s resale revenue at the end of a project may significantly affect its overall cost efficiency. We assume that unconsidered size-dependent cost categories such as insurance, maintenance, and port fees do not significantly affect the optimization results because of OSV’s size constraints (see
Section 3.1.2).
where PW (present worth) is the value of future money flows discounted to the present, calculated as
; n is the operation period (years); r is the discount rate; N
v is the number of voyages per year; and C
cap is the cargo capacity parameter (tons). The operating costs are defined as the sum of the fuel and icebreaker assistance costs. The price of icebreaker assistance per nautical mile is calculated according to [
27] considering an inflation adjustment. We assume that an icebreaker assists one ship at a time for the whole voyage, meaning that there is a maximum of one instance of icebreaker assistance per voyage. The formation of convoys is not relevant due to the peculiarities of offshore logistics; operating in a convoy suggests a high concentration of vessels at one location, which would be sub-optimal considering logistical efficiency. As a simplification, the model assumes that an icebreaker is always available. This assumption is reasonable as icebreaker operators along the Northern Sea Route tend to prioritize major Arctic offshore projects. We determine the acquisition price of a ship as a function of its lightweight as per [
21]. The model calculates a ship’s market value at the end of a project, assuming an annual value loss of 2% due to aging.
The model considers two different cargo capacity parameters Ccap to account for the different possible combinations of different cargo types. If the cargo to be transported is dominated by deck cargo, then Ccap = Sd·mdc, where Sd (m2) is the cargo deck area and mdc is the average density of the deck cargo (tons/ m2). An Arctic offshore installation uses fuel oil for heating, which is typically delivered by a tanker. Alternatively, supply vessels deliver the fuel. In this case, the dominating type of cargo consists of cargo carried within the hull, meaning that the vessel’s cargo carrying capacity is limited by its deadweight (Dw) so that Ccap = Dw.
Because the EEDI regulations concern neither vessels with diesel-electric propulsion nor offshore supply vessels [
5], we do not specify the maximum allowed EEDI index in the present study. Instead, the model uses the EKPI index as an optimization objective for eco-efficiency as per Equation (3). It is noted, this definition of EKPI is a simplification of the original EEDI formula by the IMO [
5] (e.g., it does not consider ship size-specific coefficients). In addition, contrary to the original EEDI formula that calculates a ship’s fuel consumption as a linear function of the total installed power, the applied model calculates a ship’s fuel consumption based on an approach considering its total lifecycle. This approach, which is described below, makes it possible to define EKPI and CKPI across different vessel sizes.
where C
F is a conversion factor between fuel consumption and CO
2 emission, and C
cap* is the cargo capacity parameter for EKPI (tons); C
cap* = S
d·m
dc if the cargo is dominated by deck cargoes and C
cap* = f
i·Dw if the cargo is dominated by cargos carried within the hull, where fi is the capacity correction factor for ice-classed ships [
5].
We model the ice-going performance of an OSV using a dimensionless quadratic polynomial approximation of an h–v curve based on data provided in [
28]. The h–v curve represents a vessel’s speed in level ice as a function of ice thickness at constant engine load. The prevailing ice conditions are modeled in terms of an equivalent ice thickness (h
eq), determined as per Equation (4) as a function of ice concentration (c), level ice thickness (h
i), ice ridging (b), and snow cover thickness (h
sn) [
29]. The amount of ice ridging is quantified by integer values from 0 to 5, representing the share of ridged ice in a specific area, so that 0 indicates no ice ridging and 5 indicates 100% ridged ice.
where k
sn is 0.5 if h
sn ≥ 0.5 m and 0.33 otherwise.
A vessel’s h–v curve is typically specified for its maximum continuous rating (MCR) so that it indicates a vessels’ maximum attainable speed in different ice thicknesses. The assumption of operating at MCR in any ice condition is reasonable for low ice class vessels for which the power consumption at cruising speed in open water is close to the maximum continuous rating. High ice-class vessels such as Arctic OSVs, on the other hand, typically have a significant power reserve for icebreaking, resulting in a total installed machinery power that is significantly higher than what is needed to obtain a reasonable speed in open water. Therefore, for such vessels, it is not reasonable to assume continuous operations following an h–v curve calculated for the MCR.
The applied dimensionless approximation (see Equation (5)) makes it possible to draw h–v curves based on three parameters specified for a particular power output (j): attained speed in open water V
max,j, icebreaking capability h
ice,j, and the speed at h
ice,j (V
0,j, usually 2–3 knots). The methods from the vessel module [
21,
24] estimate the required power at various speeds. They also estimate the maximum icebreaking capability for a specific engine output. As a result, an h–v curve can be specified for any engine output.
where
. is a vessel’s speed in ice with an equivalent ice thickness of
using power output (j).
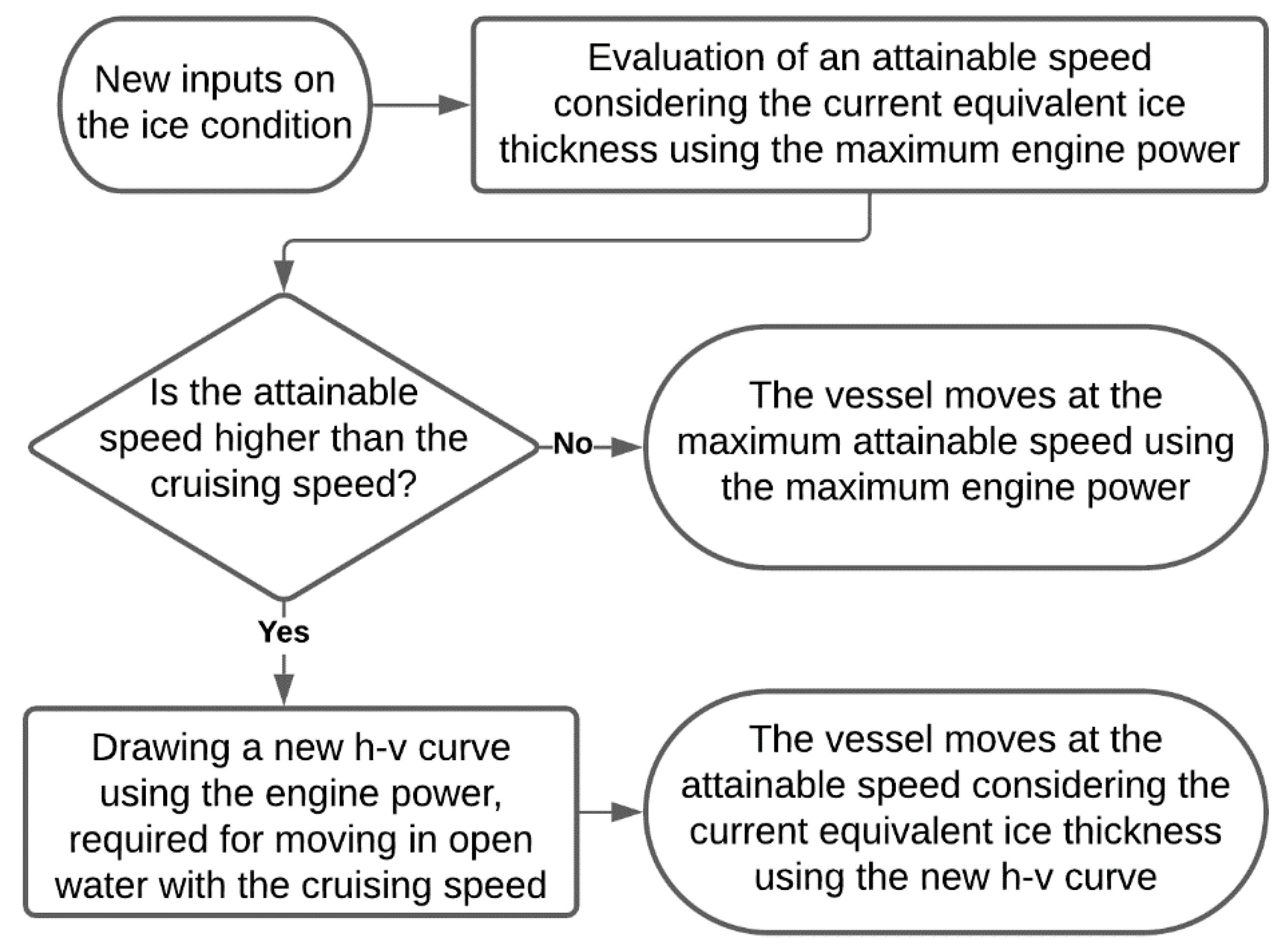
As per
Figure 5, the algorithm evaluates the maximum attainable speed during independent operation considering the prevailing equivalent ice thickness. If the attainable speed is lower than the set open water cruising speed, the vessel moves at the maximum attainable speed at MCR. Otherwise, the algorithm draws a new h–v curve for a lower engine load equal to the required power for operating at the set cruising speed in open water. Thereafter, the vessel sails at the attainable speed corresponding to the updated h–v curve considering the prevailing equivalent ice thickness. Controlled by the algorithm described above, the vessel operates at MCR only in heavy ice conditions. This prevents the vessel from operating at excessively high speed in ice and open water.
An OSV often operates at low power, for example, during standby or dynamic positioning near an offshore installation. For such operations, modern diesel-electric OSVs have auxiliary diesel generators and power distribution systems providing good fuel efficiency also at low engine load. Rao et al. [
30] demonstrated that OSVs equipped with power distribution systems can operate at constant specific fuel consumption (g/kWh) for machinery loads above 2000 kW. Therefore, because all vessels considered in the present study have a minimum engine load above 2000 kW, we assume that all the vessels considered have a specific fuel consumption of 221 g/kW·h regardless of machinery loads.
The algorithm is assumed to provide realistic fuel consumption estimations, providing a fair comparison of vessels with different icebreaking capabilities. For a fair comparison, the vessels’ cruising speed in open water is also included among the optimization parameters. To extend the range of feasible solutions to include vessels with moderate icebreaking capabilities, it is assumed that Arctic OSVs may obtain icebreaker assistance when facing extreme ice conditions. Icebreakers are here modeled as resources that help OSVs to increase their speed without increasing their power output. Icebreaker’s h–v curves are defined for their MCR using the dimensionless approximation described above. The speed of an icebreaker-assisted vessel is estimated according to [
31] as a function of the icebreaker’s attainable speed, the prevailing navigational season (summer–autumn/winter–spring), and the ice class of the assisted vessel. This methodology is based on the real-life experience of icebreaking operations along the Northern Sea Route.
The optimization of icebreaking assistance is essential because the optimal level of assistance differ for different vessels depending on their icebreaking capabilities. We optimize the use of icebreaker assistance for cost-efficiency separately considering real-life practice. Because the assisting icebreakers are assumed to be nuclear-powered, the eco-efficiency calculations do not consider their emissions. Separately for each voyage, the algorithm decides whether a ship calls for icebreaker assistance based on an assessment of the total operating costs, calculated as the sum of fuel and icebreaker assistance costs. It is noted that due to limited icebreaking resources, it is not reasonable to assume year-round operation with icebreaking assistance provided for all vessels.
The main outcome of the model is an estimate of a vessel’s total annual fuel consumption (see Equation (6)).
where m is the month number; N
m is the average number of voyages in month m; s is the route segment number; s
max is the number of segments along the route; i is the ice condition type number corresponding to the equivalent ice thickness range; i
max is the number of different types of ice condition occurring along the segment s; F
m,s,i is the fuel consumption in month m for segment s in ice condition i; p
m,s,i is the probability of occurrence of ice conditions of type i along the route segment s in month m; and F
CO—the fuel consumption for cargo operations. The values of N
m and F
m,s,i are evaluated considering the output of the algorithms for reduced fuel consumption and optimized icebreaking assistance. The total duration of offshore cargo operations is estimated as per [
21]. For port and platform cargo handling operations, the fuel consumption is assumed to be two and ten tons per day, respectively. The fuel consumption per hour is calculated by dividing the annual fuel consumption by the total annual operating hours.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












