
A Hydrodynamic-Based Robust Numerical Model for Debris Hazard and Risk Assessment

Abstract
:1. Introduction
2. Model Description
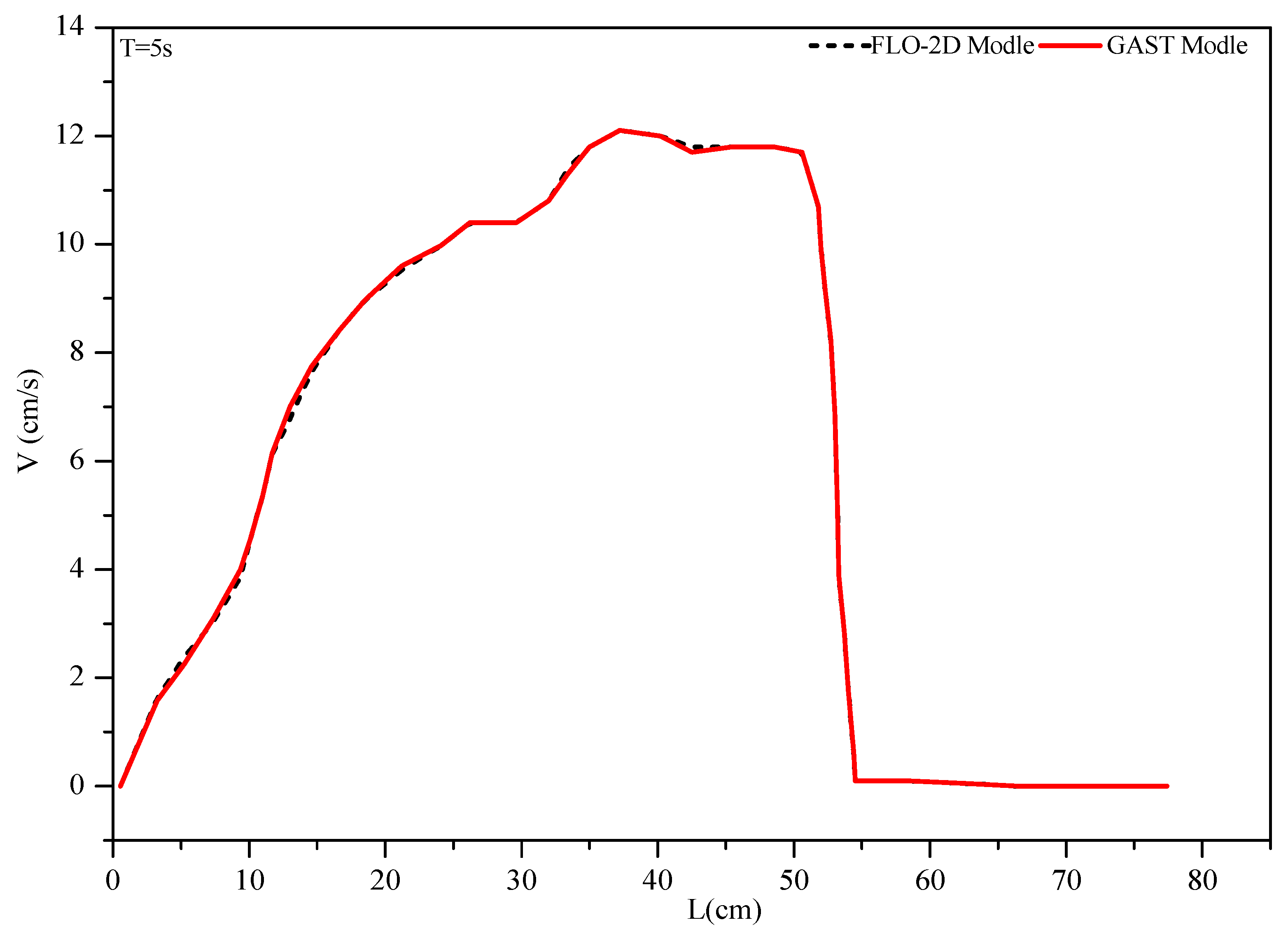
3. Model Verification
4. Numerical Tests
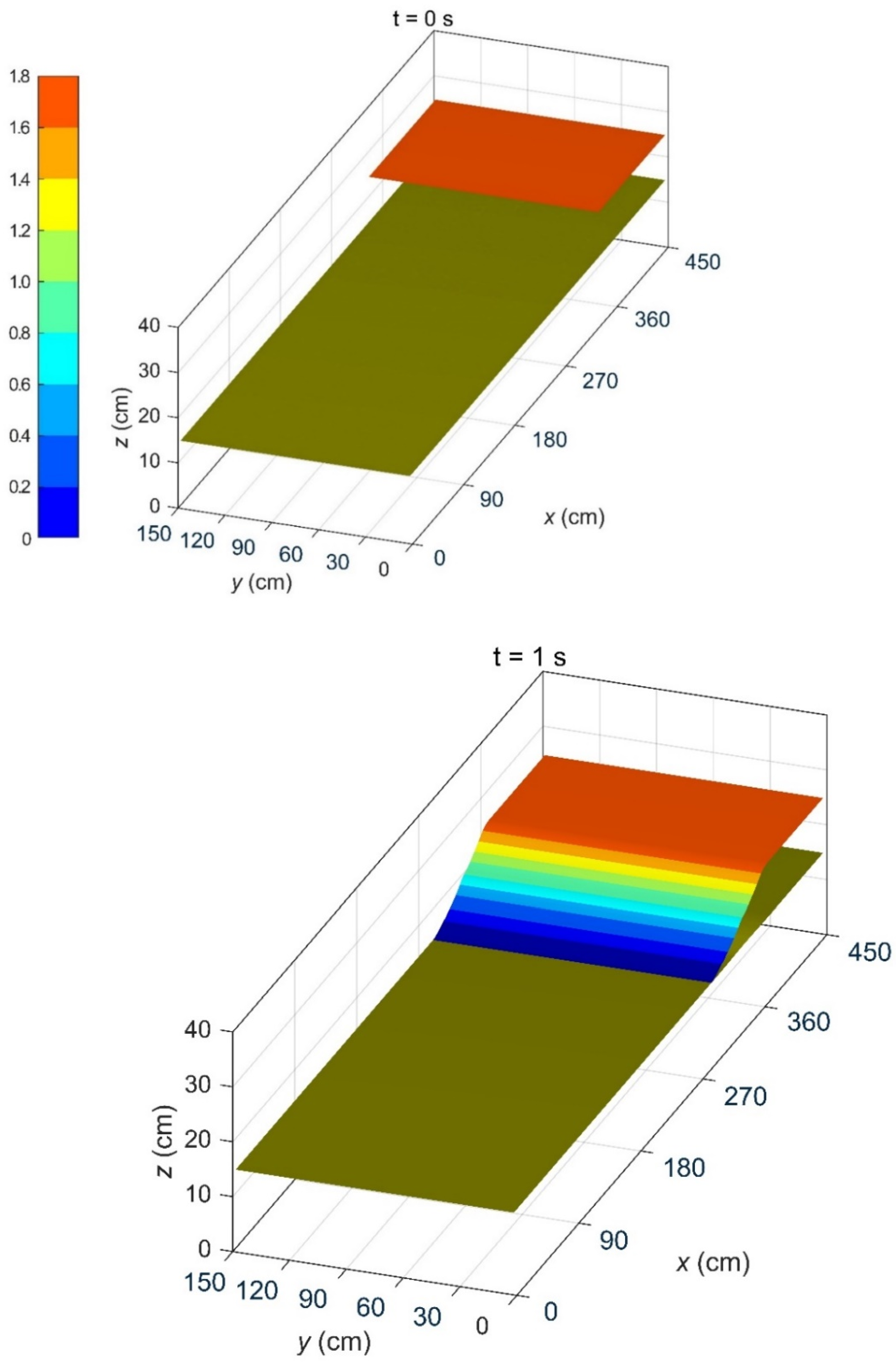
4.1. Numerical Simulation of Dam-Breaking Debris Low
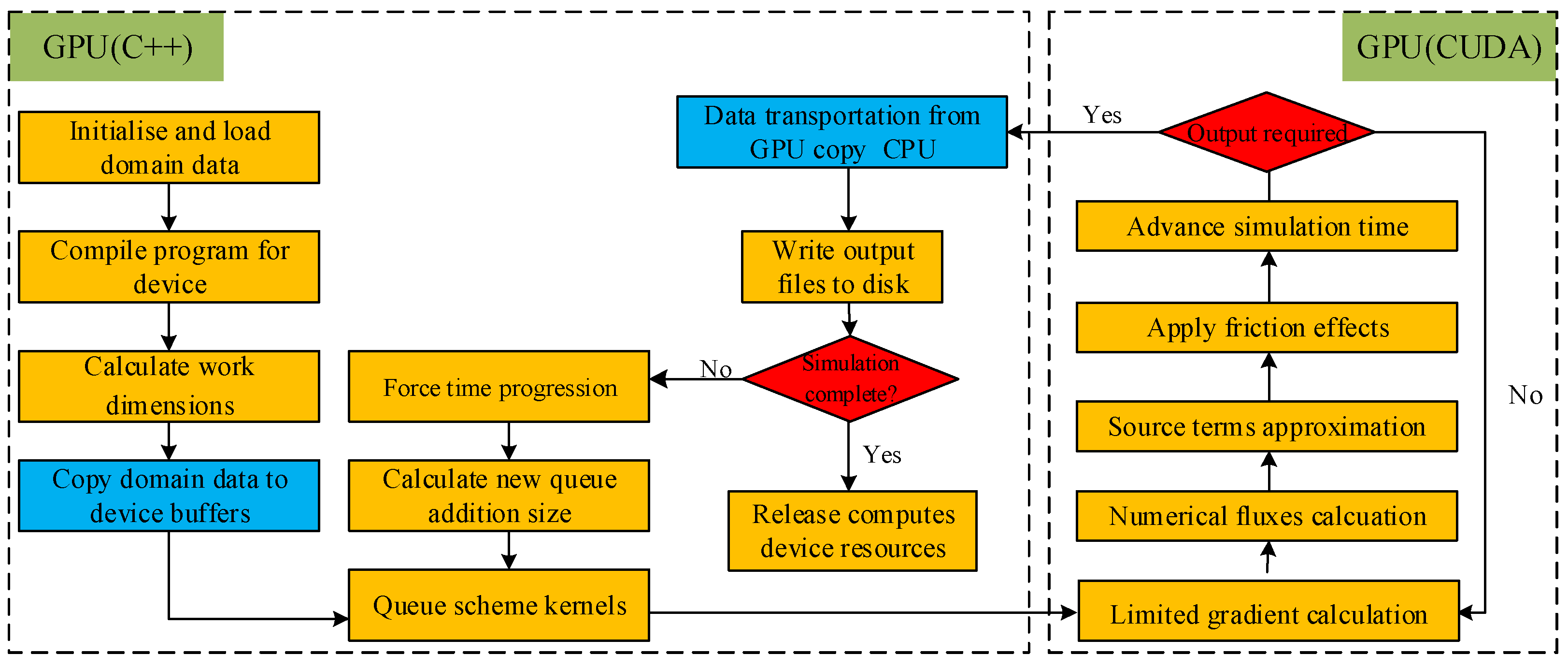
4.2. GPU and CPU Runtime
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, Y.; Nie, L.; Zhang, M.; Wang, H.; Xu, Y.; Zuo, T. Assessment of Debris Flow Risk Factors Based on Meta-Analysis—Cases Study of Northwest and Southwest China. Sustainability 2020, 12, 6841. [Google Scholar] [CrossRef]
- Li, Q.; Lu, Y.; Wang, Y.; Xu, P. Debris Flow Risk Assessment Based on a Water–Soil Process Model at the Watershed Scale Under Climate Change: A Case Study in a Debris-Flow-Prone Area of Southwest China. Sustainability 2019, 11, 3199. [Google Scholar] [CrossRef] [Green Version]
- Lyu, H.-M.; Shen, J.S.; Arulrajah, A. Assessment of Geohazards and Preventative Countermeasures Using AHP Incorporated with GIS in Lanzhou, China. Sustainability 2018, 10, 304. [Google Scholar] [CrossRef] [Green Version]
- Armanini, A.; Fraccarollo, L.; Larcher, M. Liquid-granular channel flow dynamics. Powder Technol. 2008, 182, 218–227. [Google Scholar] [CrossRef]
- Rosatti, G.; Begnudelli, L. Two-dimensional simulation of debris flows over mobile bed: Enhancing the TRENT2D model by using a well-balanced Generalized Roe-type solver. Comput. Fluids 2013, 71, 179–195. [Google Scholar] [CrossRef]
- Pitman, E.B.; Le, L. A two-fluid model for avalanche and debris flows. Philos. Trans. R. Soc. Math. Phys. Eng. Sci. 2005, 363, 1573–1601. [Google Scholar] [CrossRef] [PubMed]
- Pelanti, M.; Bouchut, F.; Mangeney, A. A Roe-Type scheme for two-phase shallow granular flows over variable topography. ESAIM Math. Model. Numer. Anal. 2008, 42, 851–885. [Google Scholar] [CrossRef] [Green Version]
- Pailha, M.; Pouliquen, O. A two-phase flow description of the initiation of underwater granular avalanches. J. Fluid Mech. 2009, 633, 115–135. [Google Scholar] [CrossRef]
- Pudasaini, S.P. A general two-phase debris flow model. J. Geophys. Res. Earth Surf. 2012, 117. [Google Scholar] [CrossRef]
- Greco, M.; Iervolino, M.; Leopardi, A.; Vacca, A. A two-phase model for fast geomorphic shallow flows. Int. J. Sediment. Res. 2012, 27, 409–425. [Google Scholar] [CrossRef]
- Xia, C.C.; Li, J.; Cao, Z.X.; Liu, Q.Q.; Hu, K.H. A quasi single-phase model for debris flows and its comparison with a two-phase model. J. Mt. Sci. 2018, 15, 1071–1089. [Google Scholar] [CrossRef]
- Da-you, L.I.U. Discussion on the Concepts of Two-Phase Flow, Multiphase Flow, Multifluid Model and Non-Newtonian Flow. Adv. Mech. 1994, 24, 66–74. [Google Scholar]
- Johnson, A.; Rahn, P. Mobilization of debris flows. Z. Fur Geomorphol. 1970, 9, 168–186. [Google Scholar]
- Takahashi, T. Mechanical characteristics of debris flow. J. Hydraul. Div. 1978, 104, 1153–1169. [Google Scholar] [CrossRef]
- Chen, C. General solutions for viscoplastic debris flow. J. Hydraul. Eng. 1988, 114, 259–282. [Google Scholar] [CrossRef]
- Chen, H.X.; Zhang, L.M.; Gao, L.; Yuan, Q.; Lu, T.; Xiang, B.; Zhuang, W.L. Simulation of interactions among multiple debris flows. Landslides 2017, 14, 595–615. [Google Scholar] [CrossRef]
- Iverson, R.M. The physics of debris flows. Rev. Geophys. 1997, 35, 245–296. [Google Scholar] [CrossRef] [Green Version]
- Denlinger, R.P.; Iverson, R.M. Flow of variably fluidized granular masses across three-dimensional terrain:2. Numerical predictions and experimental tests. J. Geophys. Res. 2001, 106, 553–566. [Google Scholar] [CrossRef]
- Bouchut, F.; Fernández-Nieto, E.D.; Mangeney, A.; Narbona-Reina, G. A two-phase shallow debris flow model with energy balance. ESAIM Math. Modell. Numer. Anal. 2015, 49. [Google Scholar] [CrossRef] [Green Version]
- Beppu, M.; Inoue, R.; Ishikawa, N.; Hasegawa, Y.; Mizuyama, T. Numerical simulation of debris flow model by using modified MPS method with solid and liquid particles. J. Jpn. Soc. Eros. Control Eng. 2011, 63, 32–42. [Google Scholar]
- Chen, S.; Doolen, G.D. Lattice Boltzmann method for fluid flows. Annu. Rev. Fluid Mech. 2003, 30, 329–364. [Google Scholar] [CrossRef] [Green Version]
- De Leon, A.A.; Jeppson, R.W. Hydraulics and Numerical Solutions of Steady-State but Spatially Varied Debris Flow; Utah Water Research Laboratory: Logan, UT, USA, 1982; p. 95. [Google Scholar]
- Schamber, D.R.; MacArthur, R.C. One-dimensional model for mud flows. NASA STI/Recon. Tech. Rep. 1985, 86, 1334–1339. [Google Scholar]
- Takahashi, T. Estimation of potential debris flows and their hazardous zones: Soft countermeasures for a disaster. Nat. Disaster Sci. 1981, 3, 57–89. [Google Scholar]
- Iverson, R.M. Elementary theory of bed-sediment entrainment by debris flows and avalanches. J. Geophys. Res. 2012, 117, 406. [Google Scholar] [CrossRef]
- Han, G.; Wang, D. Numerical modeling of Anhui debris flow. J. Hydraul. Eng. 1996, 122, 262–265. [Google Scholar] [CrossRef]
- Hungr, O. A model for the runout analysis of rapid flow slides, debris flows, and avalanches. Can. Geotech. J. 1995, 32, 610–623. [Google Scholar] [CrossRef]
- Iverson, R.M.; Denlinger, R.P. Flow of variably fluidized granular masses across three-dimensional terrain: Coulomb mixture theory. J. Geophys. Res. 2001, 106, 537–552. [Google Scholar] [CrossRef]
- McDougall, S.; Hungr, O. A model for the analysis of rapid landslide motion across three-dimensional terrain. Can. Geotech. J. 2004, 41, 1084–1097. [Google Scholar] [CrossRef]
- O’brien, J.; Julien, P.; Fullerton, W. Two-dimensional water flood and mudflow simulation. J. Hydraul. Eng. 1993, 119, 244–261. [Google Scholar] [CrossRef]
- Hussin, H.Y.; Quan Luna, B.; van Westen, C.J.; Christen, M.; Malet, J.P.; van Asch, T.W.J. Parameterization of a numerical 2-D debris flow model with entrainment: A case study of the Faucon catchment, Southern French Alps. Nat. Hazards Earth Syst. Sci. 2012, 12, 3075–3090. [Google Scholar] [CrossRef]
- De Haas, T.; Braat, L.; Leuven, J.R.; Lokhorst, I.R.; Kleinhans, M.G. Kleinhans. Effects of debris flow composition on runout, depositional mechanisms, and deposit morphology in laboratory experiments. J. Geophys. Res. Earth Surf. 2015, 120, 1949–1972. [Google Scholar] [CrossRef] [Green Version]
- Lanzoni, S.; Gregoretti, C.; Stancanelli, L.M. Coarse-grained debris flow dynamics on erodible beds. J. Geophys. Res. Earth Surf. 2017, 122, 592–614. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Mergili, M. A multi-phase mass flow model. J. Geophys. Res. Earth Surf. 2019, 124, 2920–2942. [Google Scholar] [CrossRef] [Green Version]
- Lacasta, A.; García-Navarro, P.; Burguete, J.; Murillo, J. Preprocess static subdomain decomposition in practical cases of 2D unsteady hydraulic simulation. Comput. Fluids 2013, 80, 225–232. [Google Scholar] [CrossRef] [Green Version]
- Kalyanapu, A.J.; Siddharth, S.; Pardyjak, E.R.; Judi, D.R.; Burian, S.J. Assessment of GPU computational enhancement to a 2D flood model. Environ. Model. Softw. 2011, 26, 1009–1016. [Google Scholar] [CrossRef]
- Vacondio, R.; Dal Palù, A.; Mignosa, P. GPU-enhanced finite volume shallow water solver for fast flood simulations. Environ. Model. Softw. 2014, 57, 60–75. [Google Scholar] [CrossRef]
- Ouyang, C.; He, S.; Tang, C. Numerical analysis of dynamics of debris flow over erodible beds in Wenchuan earthquake-induced area. Eng. Geol. 2015, 194, 62–72. [Google Scholar] [CrossRef]
- Savage, S.B.; Hutter, K. The motion of a finite mass of granular material down a rough incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Hou, J.; Lian, Q.; Simons, F.; Hinkelmann, R. A 2D well balanced shallow flow model for unstructured grids with novel slope source term treatment. Adv. Water Resour. 2013, 52, 107–131. [Google Scholar] [CrossRef]
- Hou, J.; Liang, Q.; Simons, F.; Hinkelmann, R. A stable 2D unstructured shallow flow model for simulations of wetting and drying over rough terrains. Comput. Fluids 2013, 82, 132–147. [Google Scholar] [CrossRef]
- Liang, Q.; Marche, F. Numerical resolution of well-balanced shallow water equations with complex source terms. Adv. Water Resour. 2009, 32, 873–884. [Google Scholar] [CrossRef]
- Iverson, R.M.; Logan, M.; LaHusen, R.G.; Berti, M. The perfect debris flow aggregated results from 28 large-scale experiments. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- George, D.L.; Iverson, R.M. A two-phase debris-flow model that includes coupled evolution of volume fractions, granular dilatancy, and pore-fluid pressure. In Proceedings of the 5th International Conference on Debris Flow Hazards Mitigation, Padova, Italy, 14–17 June 2011; pp. 415–424. [Google Scholar]
- Iverson, R.M.; Reid, M.E.; Logan, M.; LaHusen, R.G.; Godt, J.W.; Griswold, J.P. Positive feedback and momentum growth during debris-flow entrainment of wet bed sediment. Nat. Geosci. 2011, 4, 116–121. [Google Scholar] [CrossRef]
- Komatina, D.; Jovanovic, M. Experimental study of steady and unsteady free surface flows with water-clay mixtures. J. Hydraul. Res. 1997, 35, 579–590. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Fischer, J.T. A mechanical erosion model for two-phase mass flows. Int. J. Multiph. Flow 2020, 132, 103416. [Google Scholar] [CrossRef]
- Stancanelli, L.M.; Peres, D.J.; Cancelliere, A.; Foti, E. A combined triggering-propagation modeling approach for the assessment of rainfall induced debris flow susceptibility. J. Hydrol. 2017, 550, 130–143. [Google Scholar] [CrossRef] [Green Version]
- Chuang, M.H.; Chang, T.J.; Hsu, M.H.; Lin, M.L. An analysis of debris-flow transport in tributaries of Chen-Yo-Lan Creek, Taiwan. In Debris-Flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Proceedings 2nd International DFHM Conference: Taipei, Taiwan, 16–18 August 2000; Wieczorek, G.F., Naeser, N.D., Eds.; Brookfield: Toronto, ON, Canada, 2000; pp. 515–519. [Google Scholar]
- Garciá, R.; López, J.L.; Noya, M.; Bello, M.E.; Bello, M.T.; González, N.; Paredes, G.; Vivas, M.I.; O’Brien, J.S. Hazard mapping for debris flow events in the alluvial fans of northern Venezuela. In Debris-Flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Proceedings of the 3rd International DFHM Conference, Davos, Switzerlan, 10–12 September 2013; Rickenmann, D., Chen, C.L., Eds.; Millpress Science Publishers: Davos, Switzerland, 2003; pp. 589–599. [Google Scholar]
- Ghilardi, P.; Natale, L.; Savi, F. Debris-flow propagation on urbanized alluvial fans. In Debris Flow Hazards Mitigation: Mechanics, Prediction, and Assessment, Proceedings of the 2nd International DFHM Conference, Taipei, Taiwan, 16–18 August 2000; Wieczorek, G.F., Naeser, N.D., Eds.; August Aimé Balkema: Avereest, The Netherlands, 2000; pp. 471–477. [Google Scholar]
- Hübl, J.; Steinwendtner, H. Modellierung von Murgangen anhand zweier ausgewahlter Beispiele in Österreich. In Proceedings of the Internationales Symposium Interpraevent, Villach, Austria, March 2000; pp. 179–190. [Google Scholar]
- Li, J.; Cao, Z.; Hu, K.; Pender, G.; Liu, Q. A depth-averaged two-phase model for debris flows over fixed beds. Int. J. Sediment. Res. 2018, 33, 462–477. [Google Scholar] [CrossRef]
- Li, J.; Cao, Z.; Hu, K.; Pender, G.; Liu, Q. A depth-averaged two-phase model for debris flows over erodible beds. Earth Surf. Process. Landf. 2018, 43, 817–839. [Google Scholar] [CrossRef]
- Frank, F.; McArdell, B.W.; Huggel, C.; Vieli, A. The importance of entrainment and bulking on debris flow runout modeling: Examples from the Swiss Alps. Nat. Hazards Earth Syst. Sci. 2015, 15, 2569–2583. [Google Scholar] [CrossRef] [Green Version]
- Eglit, M.E.; Kulibaba, V.S.; Naaim, M. Impact of a snow avalanche against an obstacle. Formation of shock waves. Cold Reg. Sci. Technol. 2007, 50, 86–96. [Google Scholar] [CrossRef]
- Méjean, S.; Guillard, F.; Faug, T.; Einav, I. Length of standing jumps along granular flows down smooth inclines. Phys. Rev. Fluids 2020, 5, 034303. [Google Scholar] [CrossRef]
- Dewan, A.M. Hazards, risk, and vulnerability. In Floods in a Megacity; Springer: Dordrecht, The Netherlands, 2013; pp. 35–74. [Google Scholar]
- Bhattarai, K.; Conway, D. Urban vulnerabilities in the Kathmandu valley, Nepal: Visualizations of human/hazard interactions. J. Geogr Inf. Syst. 2010, 2, 63–84. [Google Scholar] [CrossRef] [Green Version]
- Clark, G.E.; Moser, S.C.; Ratick, S.J.; Dow, K.; Meyer, W.B.; Emani, S.; Jin, W.; Kasperson, J.X.; Kasperson, R.E.; Schwarz, H.E. Assessing the vulnerability of coastal communities to extreme storms:the case of Revere, MA, USA. Mitig. Adapt. Strateg. Glob. Chang. 1998, 3, 59–82. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rough Bare Bed | 2700 | 1000 | 2020 | 0 | 40 | 40 | 40 | 15 | 12 | / |
| Erodible Bed | 2700 | 1000 | 2020 | 0 | 40 | 40 | 40 | 15 | 12 | 0.8 |
| Experimental Value | 2700 | 1000 | 2010 | <400 | 39 | 39 | 40.7 | / | / | / |
| Content | Time | RMSE | R2 (%) | MRE |
|---|---|---|---|---|
| Depth-L | 5 s | 0.1822 | 95.8 | 1.325 |
| 7 s | 0.0208 | 97.2 | 1.289 | |
| 10 s | 0.0459 | 96.4 | 1.244 | |
| Average | 0.2489 | 96.4 | 1.286 | |
| Velocity-L | 5 s | 0.035 | 90.2 | 1.412 |
| 7 s | 0.056 | 97.6 | 1.366 | |
| 10 s | 0.062 | 94.5 | 1.402 | |
| Average | 0.051 | 94.1 | 1.393 | |
| CPU (Four Cores) | GPU | |
|---|---|---|
| t | t | sup |
| 5151.9 s | 352.21 s | 14.62 |
| Model | FB (Fixed Bed) | EB (Erodible Bed) |
|---|---|---|
| Two-phase model (Li et al. 2017a, b) | 1.22 | 1.31 |
| GAST (GPU Accelerated Surface Water Flow and Transport Model) | 0.75 0.80 0.79 1.00 | 0.98 1.10 1.04 0.97 |
| Speed-up (Four averages) | 18–35% | 16–25% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, Y.; Hou, J.; Tong, Y.; Shi, B. A Hydrodynamic-Based Robust Numerical Model for Debris Hazard and Risk Assessment. Sustainability 2021, 13, 7955. https://doi.org/10.3390/su13147955
Kang Y, Hou J, Tong Y, Shi B. A Hydrodynamic-Based Robust Numerical Model for Debris Hazard and Risk Assessment. Sustainability. 2021; 13(14):7955. https://doi.org/10.3390/su13147955
Chicago/Turabian StyleKang, Yongde, Jingming Hou, Yu Tong, and Baoshan Shi. 2021. "A Hydrodynamic-Based Robust Numerical Model for Debris Hazard and Risk Assessment" Sustainability 13, no. 14: 7955. https://doi.org/10.3390/su13147955