
Shared Low-Speed Autonomous Vehicle System for Suburban Residential Areas


Abstract
:1. Introduction
1.1. Suburbanization and Autonomous Vehicles
1.2. Low-Speed AV Pilot Projects
1.3. Agent-Based Simulation and Reaserch Gap
1.4. Motivation
2. Case Study and the System
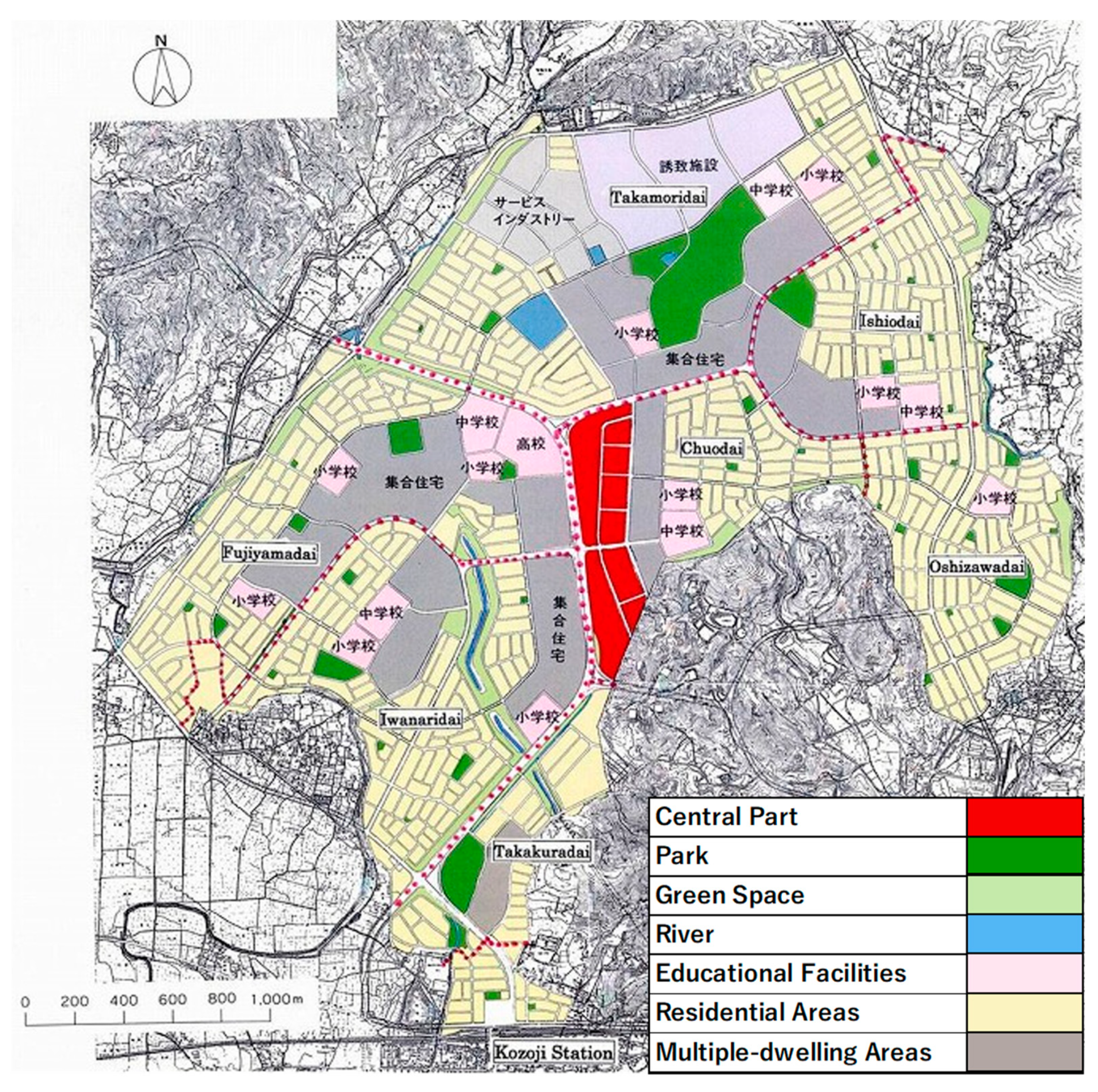
2.1. Case of Kozoji Newtown
2.1.1. Commuter Town with Aging Population
2.1.2. Transportation Infrastructure and Travel Behavior
2.1.3. Experiments on Slocal Automated Driving in Kozoji Newtown
2.1.4. Possible Issues of LSAV
2.2. System Design for the Simulation
3. Simulation
3.1. Input Data
3.1.1. Demand Data
3.1.2. Geographic Information System (GIS) Data
3.2. System Operation
3.2.1. General Flow of Operation
3.2.2. Service Period and Routing
3.2.3. Dispatching Strategies
3.2.4. Sharing
4. Results and Discussion
4.1. Output Logs and Calculation
4.1.1. Output Logs
4.1.2. Calculation and Criteria
- Definitions and Calculation
- Criteria
4.2. Scenario Results
4.2.1. LOS
- Wait Time
- Fleet Size
- In-vehicle Time
4.2.2. Share Rate
5. Conclusions
5.1. Major Findings
- The proposed low-speed system based on Slocal Automated Driving for Kozoji Newtown satisfied the local demand using 40 vehicles within the service period.
- Considerations regarding wait times:
- ➢
- Although 40 vehicles of the proposed low-speed system managed to satisfy the daily demand of 2263 trips in the case study, the average wait time was 15 min long, which is not ideal.
- ➢
- However, in the case of a high-speed scenario, the same fleet size improved the LOS significantly by reducing the average wait time to two and a half minutes.
- ➢
- By contrast, the wait time in terms of the average and 95th percentile of the no-sharing ride scenario drastically deteriorated to an unacceptable level of over 100 min.
- Considerations regarding the share rate and fleet occupation:
- ➢
- The share rate of the low-speed scenario was substantially lower when utilizing a larger fleet size. It remained at approximately 5% for 60 vehicles, whereas it increased to 43% when the fleet size decreased by 20 vehicles.
- ➢
- Under the same fleet size of 40 vehicles, the low-speed scenario exhibited a significantly higher share rate of approximately 43% than that of the high-speed scenario, which was approximately 2%.
- ➢
- Based on the fluctuations of hourly share rates, wait times, and the number of vacant vehicles in the low-speed scenario with 40 vehicles, we determined that the operator should prepare for potential fleet insufficiency time periods from 7:00–13:00 and 15:00–18:00 to improve the LOS.
5.2. Future Work
- The case of a 40-vehicle fleet has a low share rate. It is important to examine trade-offs under some thresholds, because changing the threshold may lead to a decrease in waiting time and an increase in travel time simultaneously.
- The improvement of LOS in the high-speed scenario, wherein the wait time was reduced from 15 min to two and a half minutes, was evident. Thus, the operational speed must be explored further.
- The concept of Slocal Automated Driving [31] states that a correlated system comprises two types of fleets that are arranged to support the local mobility service system simultaneously. For example, a fleet of shared mini-electric vehicles offers a short-distance service within a small zone, whereas loop-line buses link small zones together. This correlated system of the two fleets can be considered for future development of the proposed system, particularly in terms of the passenger capacity of the vehicles. Additionally, combining the current fleet with vehicles with higher passenger capacities (for example, six-seater minibuses) as a kind of service mix of the LSAV system may reduce the wait time during peak hours. Moreover, although the current system can serve between any origin and destination in the study area, a combination with other existing modes (for example, a bus line with fixed routes) of transportation should be considered.
- This study did not discriminate between trip purposes when utilizing the demand data. However, a specific trip purpose may potentially reveal a further relationship between the proposed system and related user groups. Thus, it is meaningful to design new scenarios with different trip purposes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ksenofontov, M.Y.; Milyakin, S.R. The Influence of the Spread of Automatic Control and Sharing Technologies on Motorization Processes: Concept, Calculation Scheme, Forecast. Stud. Russ. Econ. Dev. 2020, 31, 254–263. [Google Scholar] [CrossRef]
- Kulp, G.; Holcomb, M.C. Transportation Energy Data Book, 39 ed.; Oak Ridge National Laboratory: Oak Ridge, TN, USA, 2020. Available online: https://tedb.ornl.gov/ (accessed on 24 May 2021).
- Ostenda, A.; Nestorenko, T.; Yemchenko, I. The Suburbanization Process and Quality of Life. In Proceedings of the ITEMA 2019 Conference, Bratislava, Slovakia, 24 October 2019. College of Economics and Management in Public Administration. [Google Scholar] [CrossRef]
- Burian, J.; Voženílek, V. Identification and Analysis of Urbanization and Suburbanization in Olomouc region—Possibilities of GIS Analytical Tools. In Advances in Spatial Planning; InTech: London, UK, 2012; pp. 143–164. [Google Scholar]
- Feng, J.; Zhou, Y. Suburbanization and the Changes of Urban Internal Spatial Structure in Hangzhou, China. Urban Geogr. 2005, 26, 107–136. [Google Scholar] [CrossRef]
- Zhou, Y.; Ma, L.J.C. Economic restructuring and suburbanization in China. Urban Geogr. 2000, 21, 205–236. [Google Scholar] [CrossRef]
- Meyer, J.; Becker, H.; Bösch, P.M.; Axhausen, K.W. Autonomous vehicles: The next jump in accessibilities? Res. Transp. Econ. 2017, 62, 80–91. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pract. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Zakharenko, R. Self-driving cars will change cities. Reg. Sci. Urban Econ 2016, 61, 26–37. [Google Scholar] [CrossRef]
- Cohen, T.; Cavoli, C. Automated Vehicles: Exploring Possible Consequences of Government (non) intervention for Congestion and Accessibility. Transp. Rev. 2019, 39, 129–151. [Google Scholar] [CrossRef] [Green Version]
- Kang, N.; Feinberg, F.M.; Papalambros, P.Y. Autonomous electric vehicle sharing system design. J. Mech. Des. 2016, 139, 011402. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Dixit, V.V. Autonomous driving and residential location preferences: Evidence from a stated choice survey. Transp. Res. Part C Emerg. Technol. 2019, 108, 255–268. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Li, Y.; Hao, M.; Yamamoto, T. A System of Shared Autonomous Vehicles Combined with Park-And-Ride in Residential Areas. Sustainability 2019, 11, 3113. [Google Scholar] [CrossRef]
- Wen, J.; Chen, Y.X.; Nassir, N.; Zhao, J. Transit-oriented autonomous vehicle operation with integrated demand-supply interaction. Transp. Res. Part C Emerg. Technol. 2018, 97, 216–234. [Google Scholar] [CrossRef]
- Sieber, L.; Ruch, C.; Hörl, S.; Axhausen, K.W.; Frazzoli, E. Improved public transportation in rural areas with self-driving cars: A study on the operation of Swiss train lines. Transp. Res. Part A Policy Pract. 2020, 134, 35–51. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Bischoff, J.; Maciejewski, M. Autonomous taxicabs in Berlin—A spatiotemporal analysis of service performance. Transp. Res. Procedia 2016, 19, 176–186. [Google Scholar] [CrossRef]
- Bischoff, J.; Maciejewski, M. Simulation of city-wide replacement of private cars with autonomous taxis in Berlin. Procedia Comput. Sci. 2016, 83, 237–244. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Miwa, T.; Zeng, W.; Morikawa, T. An agent-based simulation model for shared autonomous taxi system. Asian Transp. Stud. 2018, 5, 1–13. [Google Scholar] [CrossRef]
- Bösch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Fujigaki, Y.; Takami, K.; Ohmori, N.; Harata, N. Equilibrium Analysis and Profit Maximization Method for Highly Convenient Shared Ride Taxi. J. Jpn. Soc. Civ. Eng. 2015, 1, A_133–A_141. (In Japanese) [Google Scholar] [CrossRef]
- Moreno, A.T.; Michalski, A.; Llorca, C.; Moeckel, R. Shared Autonomous Vehicles Effect on Vehicle-Km Traveled and Average Trip Duration. J. Adv. Transp. 2018, 23, 8969353. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.D.; Kockelman, K.M. Management of a shared autonomous electric vehicle fleet: Implications of pricing schemes. Transp. Res. Rec. 2016, 2572, 37–46. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K.M. Dynamic ride-sharing and fleet sizing for a system of shared autonomous vehicles in Austin, Texas. Transportation 2018, 45, 143–158. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Rodier, C.J. Travel effects of a suburban commuter carsharing service: CarLink case study. Transp. Res. Rec. 2005, 1927, 182–188. [Google Scholar] [CrossRef]
- Shaheen, S.A.; Novick, L. Framework for testing innovative transportation solutions: Case study of CarLink, a commuter carsharing program. Transp. Res. Rec. 2005, 1927, 149–157. [Google Scholar] [CrossRef]
- Cregger, J.; Dawes, M.; Fischer, S.; Lowenthal, C.; Machek, E.; Perlman, D. Low-Speed Automated Shuttles: State of the Practice Final Report (No. FHWA-JPO-18-692). United States. Joint Program Office for Intelligent Transportation Systems; 2018. Available online: https://rosap.ntl.bts.gov/view/dot/37060 (accessed on 5 April 2021).
- European Commission (EC). Final Report Summary—CITYMOBIL2 (Cities Demonstrating Cybernetic Mobility). 2016. Available online: https://cordis.europa.eu/project/id/314190/reporting (accessed on 5 April 2021).
- Official COI Website. Available online: http://www.coi.nagoya-u.ac.jp/develop/center/slocal (accessed on 11 April 2021).
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Shared autonomous vehicle services: A comprehensive review. Transp. Res. Part C Emerg. Technol. 2020, 111, 255–293. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S. Residential Location Choice in the Era of Shared Autonomous Vehicles. J. Plan. Educ. Res. 2018, 41, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Hao, M.; Yamamoto, T. Analysis on supply and demand of shared autonomous vehicles considering household vehicle ownership and shared use. In Proceedings of the IEEE Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 185–190. [Google Scholar] [CrossRef]
- Chen, T.D.; Kockelman, K.M.; Hanna, J.P. Operations of a shared, autonomous, electric vehicle fleet: Implications of vehicle & charging infrastructure decisions. Transp. Res. Part A Policy Pract. 2016, 94, 243–254. [Google Scholar] [CrossRef] [Green Version]
- Martinez, L.M.; Viegas, J.M. Assessing the impacts of deploying a shared self-driving urban mobility system: An agent-based model applied to the city of Lisbon, Portugal. Int. J. Transp. Sci. Technol. 2017, 6, 13–27. [Google Scholar] [CrossRef]
- Bauer, G.S.; Greenblatt, J.B.; Gerke, B.F. Cost, Energy, and Environmental Impact of Automated Electric Taxi Fleets in Manhattan. Environ. Sci. Technol. 2018, 52, 4920–4928. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cyganski, R.; Heinrichs, M.; Von Schmidt, A.; Krajzewicz, D. Simulation of automated transport offers for the city of Brunswick. Procedia Comput. Sci. 2018, 130, 872–879. [Google Scholar] [CrossRef]
- Development of Commuter Town, the Official Website of Urban Renaissance Agency. Available online: https://www.ur-net.go.jp/central/nt/ (accessed on 11 May 2021).
- Demographic Data of Kozoji Newtown, Official Kasugai City Website. Available online: https://www.city.kasugai.lg.jp/shisei/gyousei/toukei/1008359.html (accessed on 20 April 2021).
- Annual Report on the Ageing Society (FY2020). Available online: https://www8.cao.go.jp/kourei/whitepaper/w-2020/html/gaiyou/s1_1.html (accessed on 20 April 2021).
- Website of Kasugai City. Available online: https://www.city.kasugai.lg.jp/shisei/machi/new_town/ (accessed on 22 July 2021).
- Website of Urban Renaissance Agency. Available online: https://www.ur-net.go.jp/central/nt/ (accessed on 22 July 2021).
- Website of Kozoji Newtown. Available online: https://kozoji-nt.com/access/ (accessed on 22 July 2021).
- Kitamura, S.; Mizuta, T.; Nakamura, T.; Sato, H.; Morikawa, T.; Nakasuga, A.; Minamikawa, A. A Practical Study on Demand Analysis for Introducing Low-speed Autonomous Vehicle. J. Jpn. Soc. Civ. Eng. Ser. 2021, 76, I_1093–I_1106. (In Japanese) [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure and Transport. Heisei 22nd National Road Traffic Survey (Road Traffic Census) General Traffic Survey Total List; Ministry of Land, Infrastructure and Transport: Tokyo, Japan, 2011. (In Japanese)
- Website of MAS Community. Available online: https://mas.kke.co.jp/en/ (accessed on 20 July 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | No-Sharing | Low-Speed | High-Speed | |
|---|---|---|---|---|
| Maximum time before cancel (min) | 500 | |||
| Service period | 6:00 a.m.–11:59 p.m. | |||
| Demand data | 10 sets, average 2263 trips/day | |||
| Share ride | Strategy equipped | FALSE | TRUE | TRUE |
| Threshold | Null | <150% direct time <5 min time difference | ||
| Speed (km/h) | Arterial | 15 | 30 | |
| Non-arterial | 7.5 | 15 | ||
| Fleet Size | 40 | 50 | 60 | 70 |
|---|---|---|---|---|
| Average | 0:15:01 | 0:07:06 | 0:04:54 | 0:04:31 |
| 95th Percentile | 0:36:53 | 0:18:46 | 0:11:40 | 0:11:02 |
| Fleet Size | 40 | |||
|---|---|---|---|---|
| Scenario | No-Sharing | Low-Speed | High-Speed | |
| Average | 1:52:25 | 0:15:01 | 0:02:27 | |
| 95th Percentile | 3:35:16 | 0:36:53 | 0:05:47 | |
| Ratio of passenger | <30 min | 9.82% | 87.93% | 100.00% |
| <10 min | 3.56% | 42.06% | 99.97% | |
| <5 min | 1.51% | 23.24% | 90.57% | |
| Fleet Size | 40 | ||
|---|---|---|---|
| Scenario | No-Sharing | Low-Speed | High-Speed |
| Average | 0:07:56 | 0:08:34 | 0:03:58 |
| 95th Percentile | 0:16:29 | 0:18:34 | 0:08:16 |
| Fleet Size | 40 | 50 | 60 | 70 |
|---|---|---|---|---|
| Share rate (%) | 42.90% | 13.26% | 5.26% | 4.61% |
| Time (s) | Rate | |||||
|---|---|---|---|---|---|---|
| Wait Time | Vacant Time | Utilized Time | Wait Time | Vacant Time | Utilized Time | |
| Average | 4:11:08 | 6:48:06 | 7:00:46 | 23.25% | 37.79% | 38.96% |
| Std. deviation | 0:59:58 | 0:43:28 | 0:39:54 | 5.55% | 4.03% | 3.70% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Sato, H.; Yamamoto, T. Shared Low-Speed Autonomous Vehicle System for Suburban Residential Areas. Sustainability 2021, 13, 8638. https://doi.org/10.3390/su13158638
Zhou Y, Sato H, Yamamoto T. Shared Low-Speed Autonomous Vehicle System for Suburban Residential Areas. Sustainability. 2021; 13(15):8638. https://doi.org/10.3390/su13158638
Chicago/Turabian StyleZhou, Yefang, Hitomi Sato, and Toshiyuki Yamamoto. 2021. "Shared Low-Speed Autonomous Vehicle System for Suburban Residential Areas" Sustainability 13, no. 15: 8638. https://doi.org/10.3390/su13158638
APA StyleZhou, Y., Sato, H., & Yamamoto, T. (2021). Shared Low-Speed Autonomous Vehicle System for Suburban Residential Areas. Sustainability, 13(15), 8638. https://doi.org/10.3390/su13158638